Изобретение относится к измерительной технике и может быть использовано для измерения координат центра тяжести реальных объектов (например, транспортных средств, в том числе на гусеничном и многоосном колесном шасси), которые допускается наклонять на углы от десятых долей до одного радиана.
Известны различные способы нахождения координат центра тяжести, рассматриваемые в учебниках по теоретической механике [1]. К таким способам относят «Симметрию», «Разбиение», «Дополнение», «Интегрирование», которые используются как теоретические способы определения координат центра тяжести. В качестве экспериментальных способов нахождения координат центра тяжести реальных объектов используют способы «Подвешивание», «Взвешивание».
Способ экспериментального взвешивания используется для косвенного измерения (экспериментального нахождения) координат центра тяжести. Суть способа заключается в том, что измеряют вертикальные реакции опор и расстояния между опорами в горизонтальной плоскости и по этим параметрам по формулам рассчитывают координаты центра тяжести. Недостатком данного способа является невозможность нахождения вертикальной координаты центра тяжести.
Наиболее близким по технической сущности предлагаемому способу является стандартный (описанный в международных и национальных стандартах РФ) способ измерения вертикальной координаты центра тяжести объекта [2-3]. При измерении вертикальной координаты центра тяжести объекта с большим числом опор, например, шестиколесного автомобиля или гусеничного транспортного средства возникают сложности в установке всех опор объекта в единой плоскости. В этом случае предлагается ввести дополнительную оснастку - платформу с плоской верхней поверхностью, на которой закрепляется объект. В дальнейшем измеряют опорные реакции платформы с установленным на ней объектом, вначале при горизонтально установленной поверхности платформы, а затем при наклоне платформы в продольном направлении. В каждом случае определяют расчетное горизонтальное расстояние от центра тяжести объекта до опор платформы (горизонтальные координаты). Для нахождения вертикальной координаты центра тяжести на объекте закрепляют планшет, на котором через горизонтальные координаты центра тяжести, измеренные для горизонтального и наклоненного положения платформы, проводят вертикальные линии. Пересечение линий указывает на место нахождения центра тяжести.
В общем случае при определении центра тяжести известным способом выполняются действия, указанные во второй колонке таблицы:
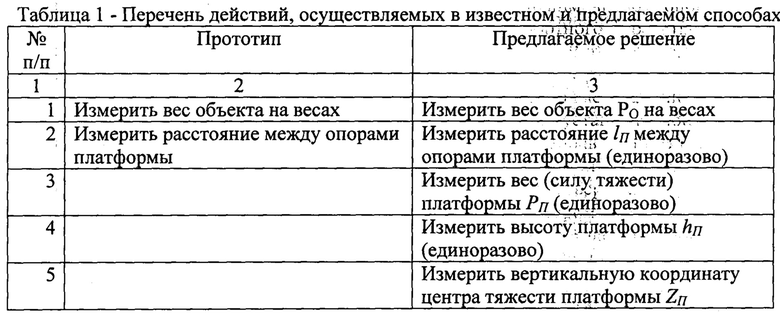
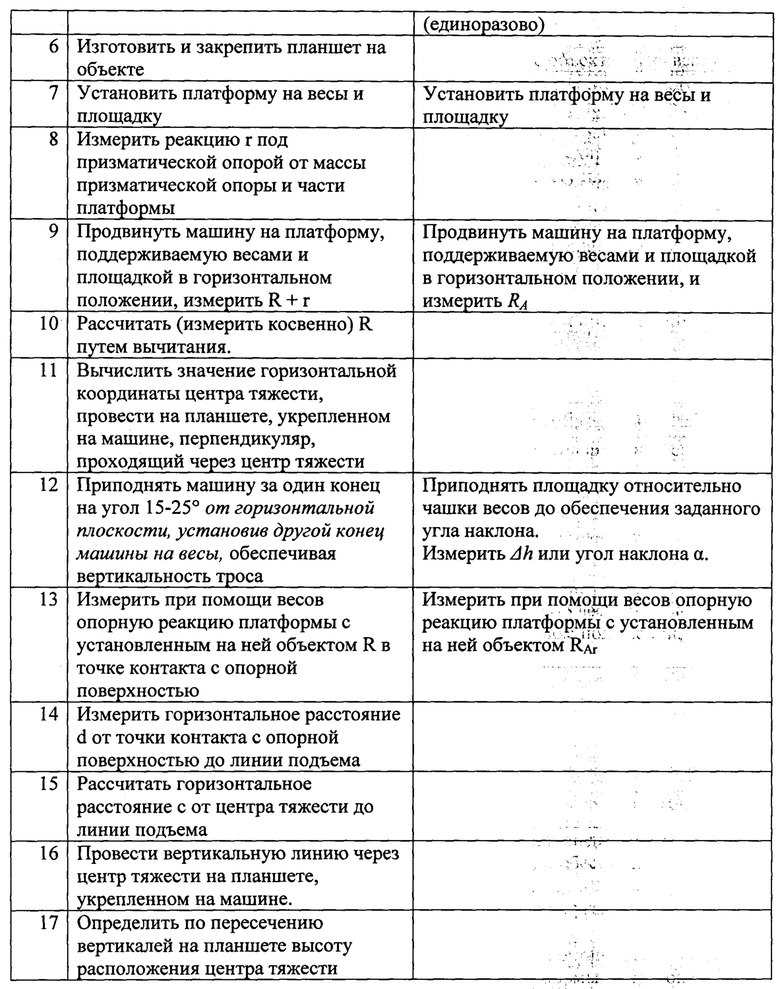
Недостатком известного способа является его трудоемкость, вызванная необходимостью изготовления планшета и его закрепления на объекте (действие 6), проведение линий на планшете (действия 11 и 16), обеспечения вертикальности троса (действие 12), измерения расстояния между линией троса и опорой (действие 14), расчета горизонтальной координаты центра тяжести при горизонтальном и наклоненном расположении объекта (действия 11 и 15), измерения координаты точки пересечения линий (действие 17). Кроме этого необходимость изготовления и закрепления планшета увеличивает стоимость измерения вертикальной координаты центра тяжести.
С целью снижения трудоемкости и стоимости измерения вертикальной координаты центра тяжести объекта предлагается выполнить действия, перечисленные в третьей колонке таблицы. Вместо 14 действий в известном способе предлагается определять вертикальную координату объекта за 10 действий. При этом 4 из них (действия со второго по пятое) не требуется выполнять каждый раз, а можно выполнить только 1 раз за весь период использования конкретной платформы.
Стоит учесть, что при использовании весов, показывающих массу, в формулах расчета координат центра тяжести вместо сил можно использовать соответствующие этим силам массы.
Для пояснения сущности изобретения приведен графический материал, включающий два рисунка, и дан вывод формул для расчета вертикальной координаты центра тяжести.
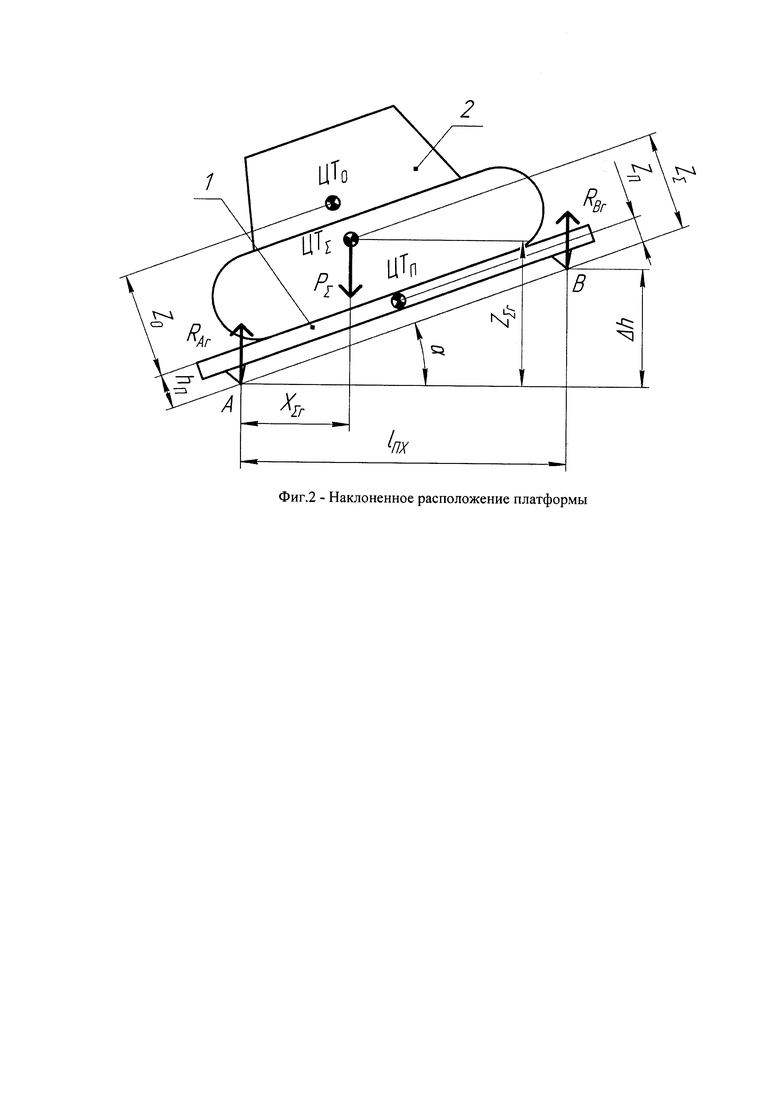
На рисунках показаны платформа 1 с опорами А и В и объект 2, установленный на верхней плоской поверхности платформы. Расстояние между опорами А и В -  У платформы и объекта показаны места расположения центров тяжести ЦТП и ЦТО, соответственно. Также показан совместный центр тяжести платформы с установленным на ней объектом ЦТ∑. Вертикальными стрелками показаны реакции опор RA и RB и совместная сила тяжести R∑, приложенная к центру тяжести платформы с объектом ЦТ∑. Буквой Z обозначены вертикальные координаты платформы ZП и платформы с объектом Z∑ относительно опоры А и объекта ZО относительно верхней поверхности платформы. Также указана высота платформы с опорами hП.
У платформы и объекта показаны места расположения центров тяжести ЦТП и ЦТО, соответственно. Также показан совместный центр тяжести платформы с установленным на ней объектом ЦТ∑. Вертикальными стрелками показаны реакции опор RA и RB и совместная сила тяжести R∑, приложенная к центру тяжести платформы с объектом ЦТ∑. Буквой Z обозначены вертикальные координаты платформы ZП и платформы с объектом Z∑ относительно опоры А и объекта ZО относительно верхней поверхности платформы. Также указана высота платформы с опорами hП.
На фиг. 1 платформа показана в горизонтальном положении (когда линия АВ, проходящая через опоры платформы, горизонтальна; также горизонтальна поверхность платформы, на которую устанавливается объект). Расстояние от опор А до совместного центра тяжести платформы с объектом по оси х - X∑.
На фиг. 2 платформа показана в наклоненном на угол α положении. При этом опоры В располагаются выше опор А на расстоянии Δh. Расстояние между опорами A и В по горизонтали -  равно проекции
равно проекции  на горизонтальную плоскость. Расстояние от опор А до совместного центра тяжести платформы с объектом по оси
на горизонтальную плоскость. Расстояние от опор А до совместного центра тяжести платформы с объектом по оси 
Вывод формул для расчета координат центра тяжести осуществлен на основе знаний теоретической механики и аналитической геометрии.
Перечень действий в предлагаемом способе указан в третьей колонке таблицы. При измерениях используют оснастку - платформу, у которой есть верхняя поверхность в виде прямоугольника и четыре либо три опоры с нижней. стороны, две из которых расположены в углах одной стороны прямоугольника, а одна (у платформы с тремя опорами) - посередине противоположной стороны прямоугольника. Верхняя поверхность платформы плоская и на ней предусмотрена возможность фиксации объекта от перемещения относительно платформы, например зажимами. Опоры делятся на передние (с большей координатой X) и задние (с меньшей координатой X). После изготовления платформы у нее измеряют: расстояние между передними и задними опорами  (действие 2), силу тяжести РП (действие 3), высоту hП (действие 4), и координаты центра тяжести, в том числе вертикальную ZП (действие 5). Перечисленные параметры вносят в паспорт платформы, как средства измерений, и периодически проводят поверку указанных параметров (например, один раз в год). Задними опорами платформа ставится на чашку весов, а передними - на горизонтальную площадку (действие 7), высота которой может регулироваться, например, с помощью домкратов.
(действие 2), силу тяжести РП (действие 3), высоту hП (действие 4), и координаты центра тяжести, в том числе вертикальную ZП (действие 5). Перечисленные параметры вносят в паспорт платформы, как средства измерений, и периодически проводят поверку указанных параметров (например, один раз в год). Задними опорами платформа ставится на чашку весов, а передними - на горизонтальную площадку (действие 7), высота которой может регулироваться, например, с помощью домкратов.
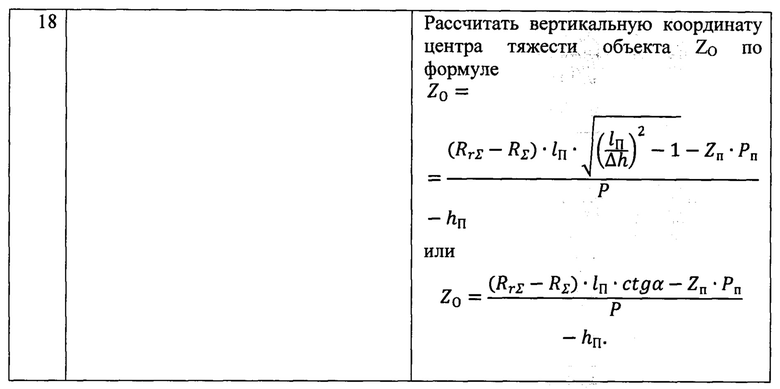
Измерения координат центра тяжести любых объектов начинается с измерения силы тяжести Р (либо массы) объекта на весах (действие 1), которые могут быть проградуированы в ньютонах либо килограммах. После чего объект размещается на платформе. Площадка устанавливается на уровне чашки весов. Регистрируется показания весов RA в горизонтальном положении объекта (действие 9). Площадка поднимается, измеряется разность между горизонтальными уровнями чашки весов и площадки Δh (действие 12). Регистрируются показания весов RAr наклоненном положении платформы с объектом (действие 13). По первому математическому выражению, приведенному в формуле изобретения
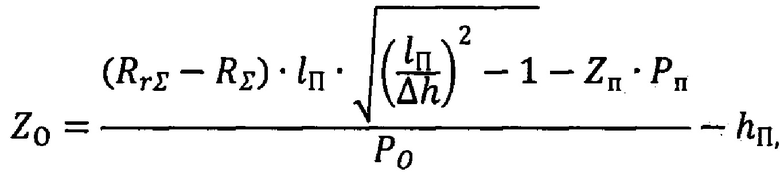
рассчитывается вертикальная координата центра тяжести.
Если известен рекомендуемый угол наклона объекта при измерении центра тяжести, то после измерения RA площадка поднимается пока угол α, не достигнет рекомендуемого значения (действие 12). Равенство угла наклона рекомендуемому значению можно контролировать угловыми мерами, совмещенными с уровнем либо другими средствами измерений. После этого регистрируются показания весов RAr и по второму математическому выражению, приведенному в формуле изобретения

находится вертикальная координата центра тяжести.
Список использованных источников
1) Тарг С.М. Краткий курс теоретической механики: Учеб. для втузов. - 10-е изд., перераб. и доп. - М.: Высш. шк., 1986. - 416 с.
2) ГОСТ 30750-2001 (ИСО 789-6-82) ТРАКТОРЫ СЕЛЬСКОХОЗЯЙСТВЕННЫЕ Определение положения центра тяжести
3) ГОСТ 27248-87 (ИСО 5005-77) МАШИНЫ ЗЕМЛЕРОЙНЫЕ Метод определения положения центра тяжести.
4) Гуревич В.Б., Минорский В.П. Учебник аналитической геометрии для втузов. - М.: Гос. издательство физико-математической литературы, 1958. - 164 с.
Способ косвенного измерения вертикальной координаты центра тяжести объекта Вывод формулы для расчета вертикальной координаты центра тяжести
С целью определения вертикальной координаты цента тяжести рассмотрим реакции опор при горизонтальном (фиг. 1) и наклоненном (фиг. 2) положении платформы с установленным на ней объектом.
Известно [1] что


где: P∑ - сила тяжести платформы с объектом;
RA, RB - реакции опоры А и В при горизонтальном объекте;
RAr, RBr - реакции опоры А и В при наклоненном объекте.
Величины X∑ и X∑r находятся через реакции опор по формулам


где: Х∑ - координата центра тяжести по оси х относительно опоры А при горизонтальном объекте;
Х∑r - координата центра тяжести по оси х относительно опоры А при наклоненном объекте;
 - расстояние между опорами А и В платформы;
- расстояние между опорами А и В платформы;
α - угол наклона платформы.
Платформа с объектом, показанная на фиг. 2, повернута относительно платформы с объектом, показанной на фиг. 1, на угол α. В аналитической геометрии [4] известно выражение для преобразования координат при повороте координатной системы на угол α

из которого получается
Подставив (3) и (4) в (6) получим


При этом котангенс угла поворота осей вычисляется по формуле

Учитывая (1) и (2) справедливо записать, что

Подставив (9) в (7) получим

С учетом (8) получается, что вертикальная координата центра тяжести, выраженная через реакции опоры А, находится по формуле

Координаты центров тяжести отдельно объекта и платформы и координата центра тяжести платформы с установленным на нее объектом связаны выражением [1]

где Z∑ - общая координата центра тяжести платформы с объектом по вертикали;
P∑ - общая сила тяжести платформы с объектом;
ZO - координата центра тяжести объекта по вертикали относительно верхней поверхности платформы;
hП - высота платформы;
РО - сила тяжести объекта;
ZП - координата центра тяжести платформы по вертикали;
РП - сила тяжести платформы.
Из выражения (12) получается

Общая координата центра тяжести объекта ZО с учетом выражения (10) находится по формуле
или с учетом выражения (8)


Учитывая, что сила тяжести Р находится умножением массы тела m на ускорение свободного падения g (P=mg), то после подстановки этой зависимости в (13) и сокращения на ускорение свободного падения получается

где mO и mп - массы объекта и платформы, соответственно.
Также не сложно показать, что во всех выражениях, где есть силы, вместо сил, можно подставлять массы, соответствующие этим силам.
Таким образом, рассчитать вертикальную координату центра тяжести объекта, установленного на платформу, можно по формулам

или
где: 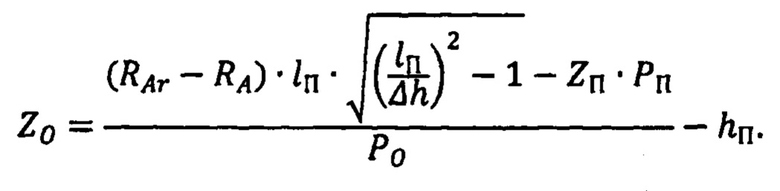
RAr - реакция опоры платформы с установленным на ней объектом в наклоненном на угол α положении;
RА - реакция опоры платформы с установленным на ней объектом в горизонтальном положении;
 - расстояние между опорами платформы, находящимися на весах и площадке;
- расстояние между опорами платформы, находящимися на весах и площадке;
α - угол наклона платформы в продольном направлении;
ZП - вертикальная координата центра тяжести платформы;
Рп - вес платформы;
РО - вес объекта;
Δh - разность уровней опор платформы в наклоненном положений.
Следует учесть, что силовые факторы (веса, реакции) формулах можно заменить на инерционные факторы (массы), соответствующие этим силам.
Список использованных источников
1) Тарг С.М. Краткий курс теоретической механики: Учеб. для втузов. - 10-е изд., перераб. и доп. - М.: Высш. шк., 1986. - 416 с.
2) ГОСТ 30750-2001 (ИСО 789-6-82) ТРАКТОРЫ СЕЛЬСКОХОЗЯЙСТВЕННЫЕ Определение положения центра тяжести
3) ГОСТ 27248-87 (ИСО 5005-77) МАШИНЫ ЗЕМЛЕРОЙНЫЕ Метод определения положения центра тяжести.
4) Гуревич В.Б., Минорский В.П. Учебник аналитической геометрии для втузов. - М.: Гос. издательство физико-математической литературы, 1958. - 164 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения вертикальной координаты центра тяжести объекта | 2019 |
|
RU2711210C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕСА И КООРДИНАТ ЦЕНТРА ТЯЖЕСТИ САМОЛЕТА | 2009 |
|
RU2397456C1 |
| Способ определения положения центра тяжести массивных и крупногабаритных объектов сложной формы | 2022 |
|
RU2809111C1 |
| Устройство для определенияКООРдиНАТ цЕНТРА ТяжЕСТи издЕлий | 1977 |
|
SU813150A1 |
| Весовое устройство для определения взлетной массы и взлетной центровки самолета и способ определения взлетной массы и взлетной центровки самолета (варианты) | 2018 |
|
RU2688575C1 |
| Способ определения статической устройчивости транспортных средств | 2022 |
|
RU2788539C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕСА СУДНА И АППЛИКАТЫ ЕГО ЦЕНТРА ТЯЖЕСТИ | 2011 |
|
RU2466900C1 |
| Дискретный инструмент для совмещенного шлифования | 2017 |
|
RU2664997C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКОГО КОЭФФИЦИЕНТА ВНЕШНЕГО ТРЕНИЯ ОТНОСИТЕЛЬНО ВРАЩАЮЩЕЙСЯ СФЕРИЧЕСКОЙ ПОВЕРХНОСТИ | 2014 |
|
RU2565359C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕНТРА МАССЫ ОБЪЕКТА | 1990 |
|
RU2100783C1 |

Изобретение относится к измерительной технике и может быть использовано для измерения координат центра тяжести реальных объектов (например, транспортных средств, в том числе на гусеничном и многоосном колесном шасси), которые допускается наклонять на углы от десятых долей до одного радиана. Для этого используется дополнительная платформа. Предлагаемый способ относится к косвенным методам измерения координат центра тяжести, при котором вертикальная координата центра тяжести рассчитывается по математическим выражениям через геометрические размеры платформы, ее вес и реакции опор платформы с установленным на нее объектом в двух пространственных положениях. Технический результат заключается в снижении трудоемкости измерений. 2 ил., 1 табл. 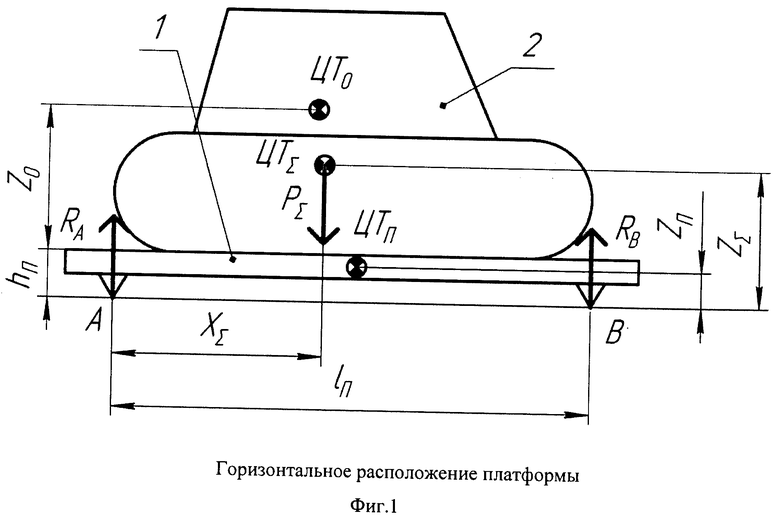
Способ косвенного измерения вертикальной координаты центра тяжести объекта, включающий измерение веса объекта РO; установку платформы двумя опорами на весы, а двумя либо одной оставшейся на горизонтальную площадку, которая может перемещаться по вертикали; установку объекта на платформу; выравнивание уровней чашки весов и площадки; измерение расстояния  между опорами, расположенными на весах и на площадке, и регистрацию показаний весов в этом положении; дальнейшую установку платформы с объектом в наклоненное положение, изменяя высоту площадки относительно чашки весов, и регистрацию показаний весов, в наклоненном положении Rr∑, отличающийся тем, что дополнительно измеряют вес платформы Рп, высоту платформы hп, вертикальную координату центра тяжести платформы Zп и различие уровней площадки и чашки весов Δh в наклоненном положении платформы с объектом и рассчитывают вертикальную координату центра тяжести объекта по формуле
между опорами, расположенными на весах и на площадке, и регистрацию показаний весов в этом положении; дальнейшую установку платформы с объектом в наклоненное положение, изменяя высоту площадки относительно чашки весов, и регистрацию показаний весов, в наклоненном положении Rr∑, отличающийся тем, что дополнительно измеряют вес платформы Рп, высоту платформы hп, вертикальную координату центра тяжести платформы Zп и различие уровней площадки и чашки весов Δh в наклоненном положении платформы с объектом и рассчитывают вертикальную координату центра тяжести объекта по формуле

или угол наклона платформы α в наклоненном положении платформы с объектом и рассчитывают вертикальную координату центра тяжести объекта по формуле

| Способ определения вертикальной координаты центра масс транспортного средства относительно опорной горизонтальной поверхности | 1990 |
|
SU1721461A1 |
| Способ определения координат центра тяжести изделий | 1978 |
|
SU789692A1 |
| Устройство для определения координат центра тяжести изделий | 1976 |
|
SU658417A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МАССЫ И ПОЛОЖЕНИЯ ЦЕНТРА МАСС ИЗДЕЛИЯ | 2011 |
|
RU2458328C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕСА И КООРДИНАТ ЦЕНТРА ТЯЖЕСТИ САМОЛЕТА | 2009 |
|
RU2397456C1 |
| CN 109459121 A, 12.03.2019. | |||

