Область техники
Изобретение относится к вилочному погрузчику для перемещения пневматических шин, снабженных транспондером.
Уровень техники
В общем, для перемещения пневматических шин в конце линии изготовления (обычно для загрузки пневматических шин в контейнеры для транспортировки) или при сортировке на складе, используют вилочные погрузчики, которые снабжены парой вилок, которые снизу поднимают (по меньшей мере) одну стопку пневматических шин (обычно, когда стопка пневматических шин расположена на палете) или которые в другом случае снабжены парой приспособлений для захвата, которые сбоку захватывают стопку пневматических шин.
В последние несколько лет наблюдается появление так называемых «умных» пневматических шин, которые снабжены транспондерами (то есть, электронными устройствами, которые выполнены с возможностью обмена данными с использованием радиочастот), что позволяет удаленно обмениваться данными по идентификации, характеристикам и истории пневматической шины.
В результате, оператор, помимо перемещения пневматических шин с помощью вилочного погрузчика, также должен считывать, с использованием надлежащего считывающего устройства, транспондеры, связанные с пневматическими шинами, например, для проверки того, что оператор работает с корректными пневматическими шинами и/или для сохранения в электронном регистре изменения положения пневматических шин.
Обычно оператор, который управляет вилочным погрузчиком, снабжен ручным считывающим устройством (т.е. считывающим устройством, которое обладает ограниченным весом, благодаря чему считывающее устройство легко перемещать): когда пневматические шины загружены на вилочный погрузчик, оператор спускается с вилочного погрузчика и, приближаясь к пневматическим шинам со считывающим устройством, считывает соответствующие транспондеры с целью достоверной идентификации самих пневматических шин. Тем не менее, эта рабочая процедура подразумевает существенные потери времени, поскольку оператор должен спуститься с вилочного погрузчика (таким образом нужно выключить вилочный погрузчик и перевести его в стояночную конфигурацию) и также должен поднести ручное считывающее устройство до каждой пневматической шины, чтобы считать соответствующий транспондер (т.е. известные ручные считывающие устройства неспособны одновременно считать транспондеры всех пневматических шин стопки пневматических шин и необходимо поднести считывающее устройство к каждой отдельной пневматической шине стопки).
В этой связи важно заметить, что максимальное расстояние считывания транспондера, который встроен в пневматическую шину, составляет примерно 1 - 2 метра, и стопка пневматических шин обладает высотой, которая обычно больше 3 метров (следовательно, больше максимального расстояния считывания); более того, когда большое количество пневматических шин расположено близко друг к другу (сложены в стопку), может иметь место экранирование и/или отражения из-за металлических частей, что дополнительно уменьшает максимальное расстояние считывания транспондеров, встроенных в пневматические шины.
В патентном документе EP2733639A1 описано считывающее устройство, которое снабжено продолговатой антенной, которую нужно вставлять в стопку пневматических шин, чтобы считывать одновременно, то есть все сразу, транспондеры всех пневматических шин стопки. Такое считывающее устройство с продолговатой антенной может быть использовано оператором вручную (в этом случае стопка пневматических шин остается неподвижной и перемещается считывающее устройство), или иначе оно может быть расположено неподвижно (на полу снизу или внутри портальной рамы сверху), и вилочный погрузчик приводят в действие так, чтобы вставить стопку пневматических шин в антенну (в этом случае стопку пневматических шин перемещают и считывающее устройство остается неподвижным). Тем не менее, также то, что предложено в патентном документе EP2733639A1, включает в себя потери времени, поскольку, в любом случае, оператору нужно спуститься с вилочного погрузчика, чтобы вставить антенну в стопку пневматических шин или иначе оператору нужно выполнить достаточно сложные манипуляции для вставки стопки пневматических шин в антенну (с риском повреждения антенны, если пневматические шины случайно столкнутся с антенной из-за ошибки при манипуляциях).
Раскрытие изобретения
Задача изобретения заключается в создании вилочного погрузчика для перемещения пневматических шин, снабженных транспондером, при этом вилочный погрузчик не обладает описанными выше недостатками и одновременно является легким и недорогим в реализации.
В соответствии с изобретением, предложен вилочный погрузчик для перемещения пневматических шин, снабженных транспондером, как изложено в приложенной формуле изобретения.
В формуле изобретения описаны предпочтительные варианты осуществления изобретения, которые образуют неотъемлемую часть описания.
Далее изобретение будет описано со ссылками на чертежи, на которых показан пример варианта осуществления изобретения.
Краткое описание чертежей
На фиг. 1 схематично показан вилочный погрузчик согласно изобретению для перемещения пневматических шин, снабженных транспондером;
на фиг. 2 - транспондер пневматической шины, перемещаемой вилочным погрузчиком по фиг. 1, и считывающее устройство вилочного погрузчика по фиг. 1; и
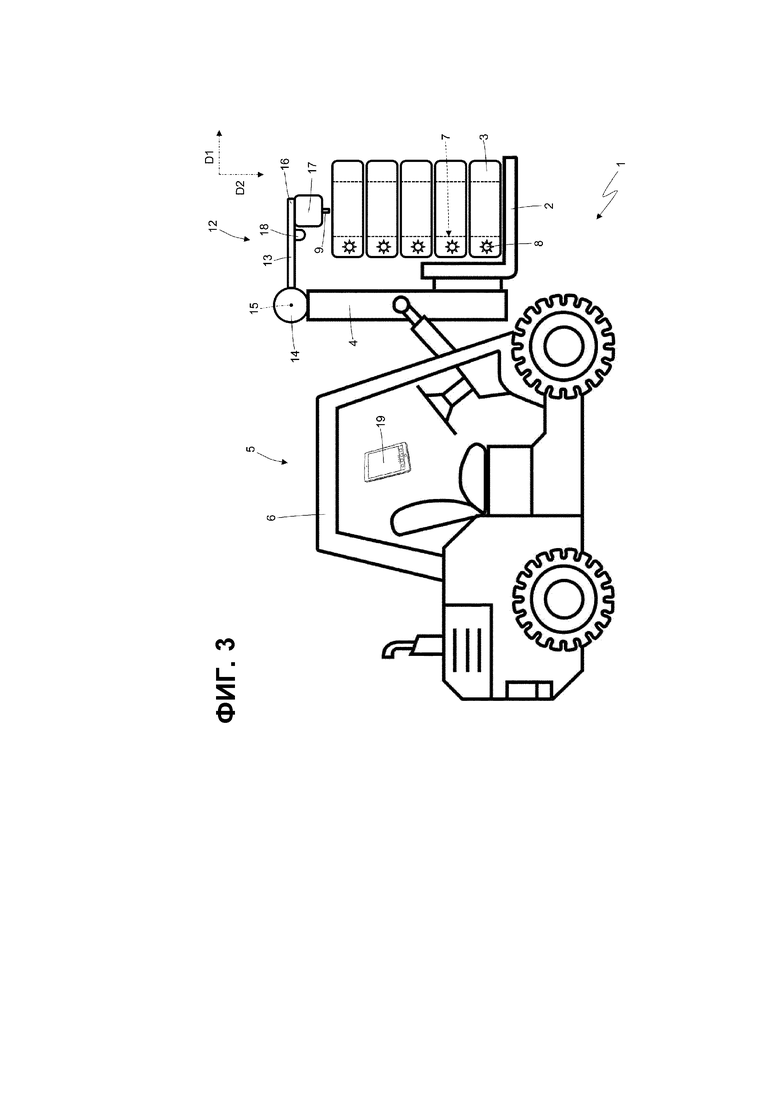
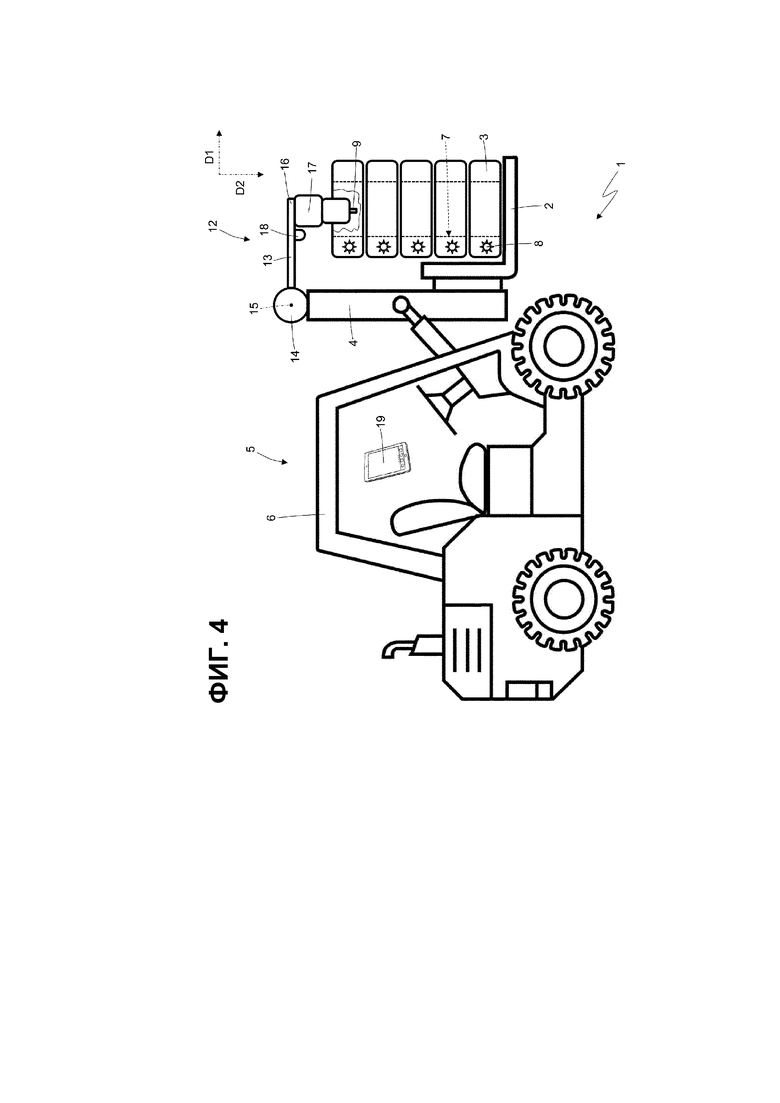
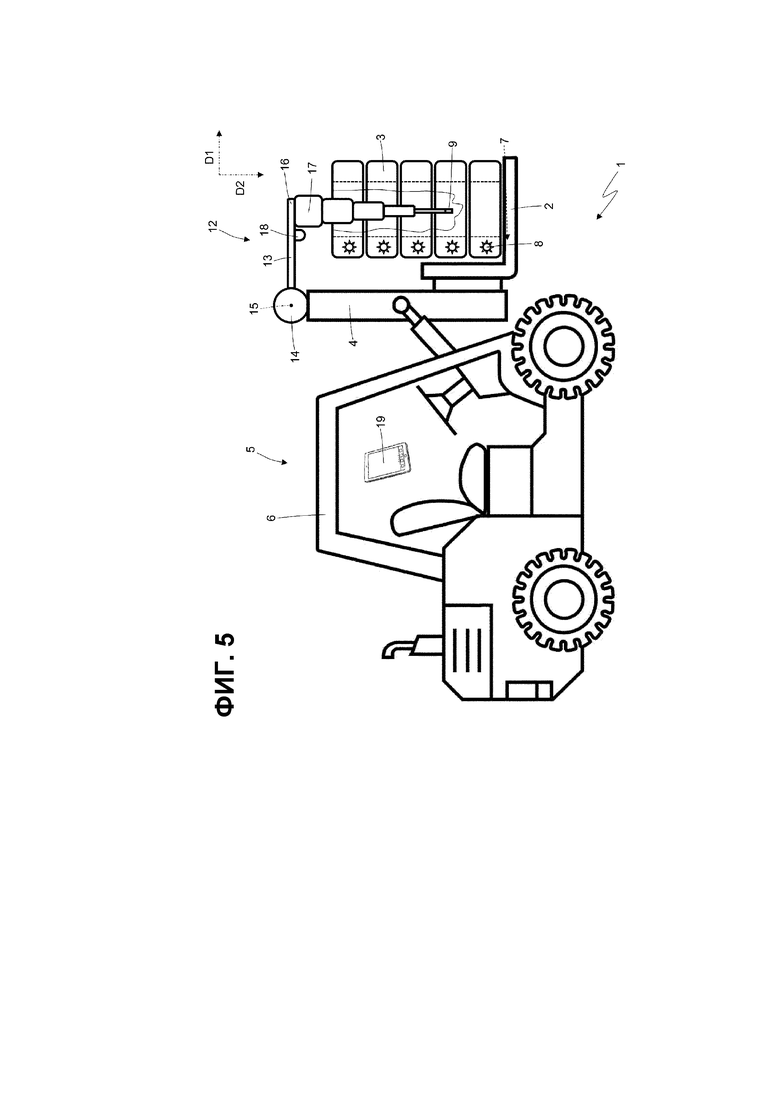
на фиг. 3 - 5 - вилочный погрузчик по фиг. 1, при этом считывающее устройство вилочного погрузчика находится в разных положениях.
Осуществление изобретения
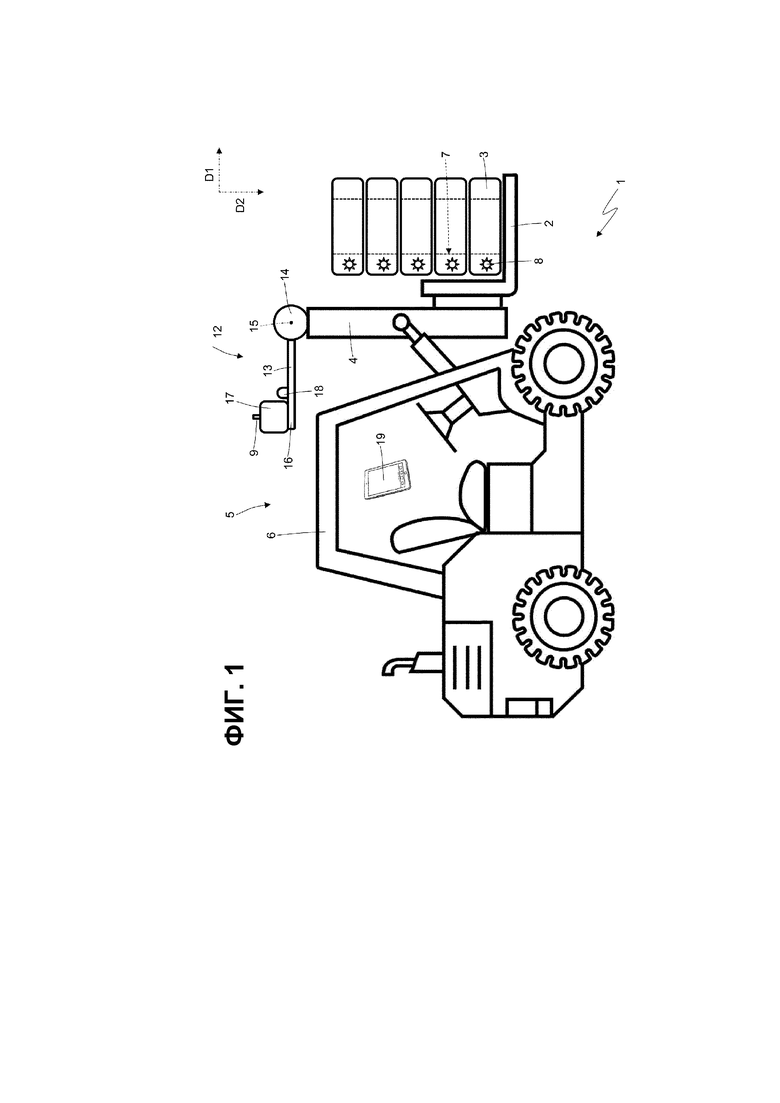
На фиг. 1 ссылочной позицией 1 в целом обозначен вилочный погрузчик.
Вилочный погрузчик 1 представляет собой рабочее средство, оборудованное колесами, оно приводится в действие электрическим, дизельным или газовым двигателем и содержит захватывающее устройство 2, которое расположено спереди и приспособлено для подхвата стопки пневматических шин 3. Захватывающее устройство 2 с возможностью сдвига установлено на несущем элементе 4 для перемещения по вертикали относительно самого несущего элемента 4; то есть захватывающее устройство 2 поднимают и опускают путем сдвига вдоль несущего элемента 4. Предпочтительно, но не обязательно, чтобы несущий элемент 4 с возможностью перемещения был установлен на раме вилочного погрузчика 1, чтобы была возможностью изменения его наклона (и, следовательно, наклона захватывающего устройства 2) по сравнению с вертикальной линией.
В варианте осуществления изобретения, который показан на приложенных чертежах, захватывающее устройство 2 содержит пару вилок (только одна из которых видна на приложенных чертежах), которые поднимают снизу стопку пневматических шин 3 (обычно, когда стопка пневматических шин 3 расположена на палете); в соответствии с другим вариантом осуществления изобретения, который не показан, захватывающее устройство 2 содержит пару приспособлений для захвата, которые сбоку захватывают стопку пневматических шин 3 (без необходимости в палете).
Вилочный погрузчик 1 дополнительно содержит кабину 5 водителя, в которой находится водитель и которая ограничена сверху горизонтальной крышей 6 (которая в общем надежна до такой степени, что она должна обеспечивать адекватную защиту водителю в случае опрокидывания вилочного погрузчика 1 или в случае падения объектов сверху на вилочный погрузчик 1).
Каждая пневматическая шина 3 обладает кольцеобразной формой с центральной полостью 7. Более того, каждая пневматическая шина 3 снабжена транспондером 8, то есть электронным устройством (обычно пассивным, то есть без подачи на него напряжения), которое способно сохранять информацию и обмениваться данными с помощью радиочастот. Другими словами, каждый транспондер 8 является «умным ярлыком» малого размера, который встроен в пневматическую шину 3 и который выполнен с возможностью ответа на удаленные запросы от конкретных неподвижных или переносных устройств, называемых считывающими устройствами (или также других запрашивающих устройств); считывающее устройство способно считывать и/или изменять информацию, содержащуюся в транспондере 8, на который передан запрос, при одновременном обмене данными с самим транспондером 8 с использованием радиочастот. Соответственно, транспондер 8 является частью беспроводной системы считывания и/или записи, которая работает в соответствии с так называемой RFID технологией («радиочастотная идентификация»).
Вилочный погрузчик 1 содержит считывающее устройство 9, которое подходит для обмена данными (взаимодействия) с транспондерами 8 пневматических шин 3; в общем, считывающее устройство 9 ограничено считыванием содержимого памяти транспондеров 8, по существу, для идентификации соответствующих пневматических шин 3, но считывающее устройство 9 также может (частично) изменять содержимое памяти транспондеров 8.
Как показано на фиг. 2, считывающее устройство 9 содержит компонент 10 беспроводной передачи (то есть, который использует электромагнитные волны) и по меньшей мере одну антенну 11, которая испускает и принимает радиоволны; возможно, что компонент 10 передачи содержит несколько (например, две, три или четыре) антенны 11.
Как показано на фиг. 1, вилочный погрузчик 1 содержит блок 12 смещения, который поддерживает по меньшей мере одну часть считывающего устройства 9 и выполнен с возможностью перемещения считывающего устройства 9 между положением ожидания (которое показано на фиг. 1), в котором считывающее устройство 9 расположено на определенном расстоянии от стопки пневматических шин 3, переносимых захватывающим устройством 2 (чтобы не мешать перемещению стопки пневматических шин 3), и рабочим положением (показанным на фиг. 4 и 5), в котором считывающее устройство 9 расположено в непосредственной близости к стопке пневматических шин 3, переносимых захватывающим устройством 2. Очевидно, что в положении ожидания (которое показано на фиг. 1) считывающее устройство 9 не может обмениваться данными с транспондерами 8 пневматических шин 3 стопки, а в рабочем положении (которое показано на фиг. 4 и 5) считывающее устройство 9 обладает возможностью обмениваться данными с транспондерами 8 всех пневматических шин стопки.
В варианте осуществления изобретения, который показан на приложенных чертежах, в рабочем положении (которое показано на фиг. 4 и 5) считывающее устройство 9 расположено в центральных полостях 7 пневматических шин 3 стопки. В соответствии с другим вариантом осуществления изобретения, в рабочем положении считывающее устройство 9 расположено снаружи пневматических шин 3 стопки (или в непосредственной близости к протектору пневматических шин 3 стопки).
В соответствии с предпочтительным вариантом осуществления изобретения, блок 12 смещения выполнен с возможностью перемещения считывающего устройства 9 как вдоль горизонтального направления D1, так и вдоль вертикального направления D2, которое перпендикулярно горизонтальному направлению D1; в варианте осуществления изобретения, который показан на приложенных чертежах, перемещение вдоль горизонтального направления D1 осуществляют с помощью поворота (как более подробно описано ниже) и далее всегда добавляют перемещения вдоль вертикального направления D2. В частности, блок 12 смещения перемещает считывающее устройство 9, по существу, вдоль горизонтального направления D1, чтобы переместить считывающее устройство 9 ближе/дальше от стопки пневматических шин (на фиг. 1 и 3 показано как считывающее устройство 9 перемещается ближе к стопке пневматических шин 3 благодаря перемещению, по существу, вдоль горизонтального направления D1); сравните с ситуацией, когда блок 12 смещения перемещает считывающее устройство 9 вдоль вертикального направления D2 для сдвига считывающего устройства 9 вдоль стопки пневматических шин 3 и, в частности, в центральных полостях 7 (на фиг. 3, 4 и 5 показано, как считывающее устройство 9 сдвигается в стопке пневматических шин 3 благодаря перемещению вдоль вертикального направления D2).
В соответствии с предпочтительным (но не ограничивающим изобретение) вариантом осуществления изобретения, показанным на приложенных чертежах, блок 12 смещения содержит рычаг 13, первый конец которого шарнирно прикреплен к основанию 14, чтобы поворачиваться относительно горизонтальной оси 15 поворота, а на втором конце 16, противоположном первому концу, он поддерживает считывающее устройство 9. В частности, блок 12 смещения содержит телескопический элемент 17, который подходит для осуществления линейного перемещения вдоль вертикального направления D2, он установлен на конце 16 рычага 13 и непосредственно поддерживает считывающее устройство 9 (то есть, телескопический элемент 17 расположен между рычагом 13 и считывающим устройством 9); другими словами, смещение вдоль горизонтального направления D1 осуществляют с помощью поворота относительно горизонтальной оси 15 поворота и оно всегда совмещается со смещением вдоль вертикального направления D2; в отличие от сказанного, смещение вдоль вертикального направления D2 осуществляют с помощью линейного смещения.
В соответствии с одним возможным вариантом осуществления изобретения, блок 12 смещения также подходит для поворота считывающего устройства 9 относительно продольной оси считывающего устройства, которая параллельна вертикальному направлению D2.
В соответствии с вариантом осуществления изобретения, который показан на приложенных чертежах, блок 12 смещения установлен наверху несущего элемента 4 (то есть основание 14 блока 12 смещения жестко прикреплено к верхней части несущего элемента 4). В соответствии с альтернативным вариантом осуществления изобретения, который не показан, блок 12 смещения установлен на крыше 6 кабины 5 водителя (т. е. основание 14 блока 12 смещения жестко прикреплено к крыше 6 кабины 5 водителя); в этом варианте осуществления изобретения блок 12 смещения должен быть достаточно легким и деформируемым (например, благодаря его изготовлению из алюминия и пластика), чтобы в случае опрокидывания вилочного погрузчика 1 блок 12 смещения разрушился бы из-за крыши 6 кабины 5 водителя без проникновения в саму крышу 6 и, соответственно, в кабину 5 водителя.
Как упомянуто выше, считывающее устройство 9 содержит компонент 10 передачи и антенну 11; в соответствии с одним возможным вариантом осуществления изобретения только антенна 11 считывающего устройства 9 установлена на блоке 12 смещения, чтобы ее перемещал сам блок 12 смещения между положением ожидания и рабочим положением (т.е. компонент 10 передачи расположен неподвижно на вилочном погрузчике 1 и никогда не перемещается); в этом случае компонент 10 передачи (так как отделен и независим от антенны 11) также может быть расположен в кабине 5 водителя и, таким образом, может быть соединен с антенной 11 с помощью протяженного коаксиального кабеля (например, частично смотанного). Если коаксиальный кабель, который соединяет компонент 10 передачи (расположенный, например, в кабине 5 водителя) с антенной 11 очень (слишком) длинный, то сам коаксиальный кабель может порождать существенную потерю мощности сигнала, что может быть компенсировано наличием усилителя.
В соответствии с альтернативным вариантом осуществления изобретения все считывающее устройство 9 установлено на блоке 12 смещения, чтобы его перемещали с помощью самого блока 12 смещения между положением ожидания и рабочим положением (т. е. блок 12 смещения перемещает как компонент 10 передачи, так и антенну 11, которые образуют неделимый блок).
В соответствии с одним возможным вариантом осуществления изобретения блоком 12 смещения вручную управляет оператор вилочного погрузчика 1, который находится в кабине 5 водителя. В соответствии с другим вариантом осуществления изобретения блок 12 смещения выполнен с возможностью осуществления, в автономном или полуавтономном режиме, всех перемещений между положением ожидания (которое показано на фиг. 1) и рабочим положением (которое показано на фиг. 4 и 5); в этом случае блок 12 смещения может содержать датчики, которые обычно расположены рядом со считывающим устройством 9 (т. е. они установлены в соответствии с концами 16 рычага 13), чтобы определять точное положение пневматических шин 3 (и, в частности, центральных полостей 7 пневматических шин 3). Такие датчики могут содержать камеру 18 (то есть, оптический датчик) и/или датчик приближения (датчик приближения часто непосредственно связан со считывающим устройством 9, чтобы перемещаться вместе с самим считывающим устройством 9). Такие же датчики также могут быть предусмотрены тогда, когда блоком 12 смещения вручную управляет оператор вилочного погрузчика 1, чтобы обеспечить помощь этому оператору 1 (в частности, камера 18).
Другими словами, как в случае ручного управления блоком 12 смещения, так и в случае независимого управления блоком 12 смещения, предпочтительно предусмотреть камеру 18, которая расположена рядом со считывающим устройством 9 (т.е. установлена на концах 16 рычага 13) и которая выполнена с возможностью получения кадров стопки пневматических шин 3, когда считывающее устройство 9 находится в рабочем положении (которое показано на фиг. 4 и 5).
В варианте осуществления изобретения, который показан на приложенных чертежах, стопка пневматических шин 3, которая расположена на захватывающем устройстве 2 вилочного погрузчика 1, ориентирована вертикально. В соответствии с другими вариантами осуществления изобретения, которые не показаны, стопка (или стопки, расположенные на специальных рейках) пневматических шин 3, расположенных на захватывающем устройстве 2 вилочного погрузчика 1, ориентирована горизонтально; в этих вариантах осуществления изобретения блок 12 смещения может сдвигаться с помощью рейки или другого приспособления, на направляющей, расположенной на опорном элементе 4 до тех пор, пока антенна 11, расположенная в соответствии с горизонтальной осью, повернутой на 90° относительно несущего элемента 4, не достигнет центра стопки или стопок (в этом случае, помимо рычага 13 между несущим элементом 4 и основанием 14 необходимо добавить другой длинный рычаг, чтобы предоставить антенне 11 возможность входа в горизонтальные стойки, поскольку ширина реек, которые переносят пневматические шины 3, в общем, больше ширины опорного элемента 4).
Вариант осуществления изобретения, показанный на приложенных фиг., требует того, чтобы единственная стопка пневматических шин 3 была расположена на захватывающем устройстве 2 вилочного погрузчика 1; в соответствии с другими вариантами осуществления изобретения, которые не показаны, на захватывающем устройстве 2 вилочного погрузчика 1 может быть расположено несколько стопок пневматических шин 3 (две, три, четыре...), которые расположены рядом друг с другом (при вертикальной или горизонтальной ориентации).
Для обеспечения того, что оператор быстро и безопасно знает то, что считаны все транспондеры 8 пневматических шин 3, образующих стопку, переносимую захватывающим устройством 2, тот же оператор должен время от времени вводить (печатать) количество пневматических шин 3, загруженных на захватывающее устройство 2 вилочного погрузчика 1.
Для этой цели, в кабине 5 водителя установлен экран, который снабжен устройством ввода (таким, как физическая клавиатура или физическое указывающее устройство или виртуальная клавиатура, если экран является сенсорным) и который соединен с компьютером 19, который в свою очередь соединен со считывающим устройством 9 (очевидно, что может быть использован планшетный компьютер, который объединяет все эти функции в одной физической структуре). Программное обеспечение, установленное на компьютере 19, помимо управления печатью количества пневматических шин 3, которые образуют стопку, переносимую захватывающим устройством 2, также отображает коды всех транспондеров 8, которые считаны считывающим устройством 9. Более того, программное обеспечение, установленное на компьютере 19, непрерывно проверяет, что количество транспондеров 8, которые считаны считывающим устройством 9, соответствует (или равно) количеству пневматических шин 3 на захватывающем устройстве 2 вилочного погрузчика 1 (которое задано оператором): в случае равенства программное обеспечение вырабатывает положительный сигнал (например, с помощью зеленого света) и операция считывания транспондеров 8 заканчивается, а в случае неравенства программное обеспечение вырабатывает отрицательный сигнал (например, с помощью красного света и слышимого предупредительного сигнала) и операция считывания транспондеров 8 должна быть повторена.
Компьютер 19 также выполняет другие функции: например, компьютер 19 может быть соединен (в общем, с помощью беспроводного соединения) с центральной системой управления склада пневматических шин 3, что нужно для обновления состояния запасов в реальном времени, то есть, тех пневматических шин 3, которые поступили, которые уехали и тех, которые в текущее время находятся в наличии.
Описанные в этом документе варианты осуществления изобретения могут быть объединены без выхода за пределы объема защиты изобретения.
Описанный выше вилочный погрузчик обладает многими достоинствами.
Во-первых, описанный выше вилочный погрузчик 1 позволяет эффективно, безопасно (т. е. с минимизацией вероятности возникновения ошибок) и полноценно считывать транспондеры 8 всех пневматических шин 3 стопки, переносимой захватывающим устройством 2, поскольку он переводит считывающее устройство 9 (или по меньшей мере антенну 11 считывающего устройства 9) очень близко ко всем пневматическим шинам 3 стопки, которую переносит захватывающее устройство 2.
Кроме того, описанный выше вилочный погрузчик 1 позволяет считывать, быстро и просто, транспондеры 8 всех пневматических шин 3 стопки, переносимой захватывающим устройством 2, поскольку оператор вилочного погрузчика 2 никогда не должен покидать кабину 5 водителя в ходе считывания транспондеров 8. Более того, считывание транспондеров 8 также может иметь место тогда, когда вилочный погрузчик 1 находится в движении (т. е. в ходе обычного перемещения вилочного погрузчика 1, которое в любом случае всегда осуществляют с уменьшенной скоростью по очевидным причинам безопасности).
Наконец, описанный выше вилочный погрузчик 1 прост и недорог в изготовлении, поскольку для него можно использовать присутствующие на рынке компоненты, которые обладают сравнительно низкой стоимостью и которые легко доступны на рынке.
Список ссылочных позиций на фиг.
1 вилочный погрузчик
2 захватывающее устройство
3 пневматические шины
4 несущий элемент
5 кабина водителя
6 крыша
7 центральная полость
8 транспондер
9 считывающее устройство
10 компонент передачи
11 антенна
12 блок смещения
13 рычаг
14 основание
15 ось поворота
16 конец
17 телескопический элемент
18 камера
19 компьютер
D1 горизонтальное направление
D2 вертикальное направление.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПНЕВМАТИЧЕСКАЯ ШИНА, ОСНАЩЕННАЯ ТРАНСПОНДЕРОМ | 2020 |
|
RU2796079C2 |
| СПОСОБ ДЛЯ ВСТАВЛЕНИЯ ЭЛЕКТРОННЫХ УСТРОЙСТВ, ПРИСПОСОБЛЕННЫХ ДЛЯ СВЯЗИ НА РАДИОЧАСТОТЕ, В СООТВЕТСТВУЮЩИЕ РЕЗИНОВЫЕ КОЖУХИ | 2020 |
|
RU2808041C2 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ОПЕРАТИВНОЙ ИНФОРМАЦИЕЙ ВОДИТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2471246C2 |
| ПНЕВМАТИЧЕСКАЯ ШИНА, ОСНАЩЕННАЯ ТРАНСПОНДЕРОМ | 2020 |
|
RU2798384C2 |
| АВТОМОБИЛЬ С КУЗОВОМ | 1994 |
|
RU2141905C1 |
| МОТОРИЗИРОВАННЫЙ ПОГРУЗЧИК С РЫЧАГОМ | 2012 |
|
RU2619405C2 |
| Поворотный телескопический погрузчик с несколькими маршрутами для подъема и спуска | 2021 |
|
RU2789186C1 |
| УСТРОЙСТВО КОНТРОЛЯ РАБОТЫ ПОГРУЗЧИКОВ | 2005 |
|
RU2297038C1 |
| СПОСОБ, ИСПОЛЬЗУЮЩИЙ ОПОЗНАВАНИЕ ВОЗДЕЙСТВИЯ ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ПАРКАМИ ТРАНСПОРТНЫХ СРЕДСТВ | 2010 |
|
RU2561482C2 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ С ИНТЕГРИРОВАННЫМ ОСТЕКЛЕНИЕМ | 2019 |
|
RU2774246C1 |

Вилочный погрузчик (1) содержит: захватывающее устройство (2), выполненное с возможностью подбора стопки пневматических шин (3), каждая из которых имеет центральную полость (7) и транспондер (8); считывающее устройство (9), снабженное антенной (11) и выполненное с возможностью обмена данными с транспондерами (8) пневматических шин (3); и блок (12) смещения, удерживающий по меньшей мере антенну (11) считывающего устройства (9) и выполненный с возможностью перемещения антенны (11) между положением ожидания, в котором антенна (11) расположена на определенном расстоянии от стопки пневматических шин (3), переносимых захватывающим устройством (2), и рабочим положением, в котором антенна (11) расположена в непосредственной близости от стопки пневматических шин (3), переносимых захватывающим устройством (2). Технический результат – повышение эффективности использования вилочного погрузчика и скорости считывания транспондеров шин. 12 з.п. ф-лы, 5 ил.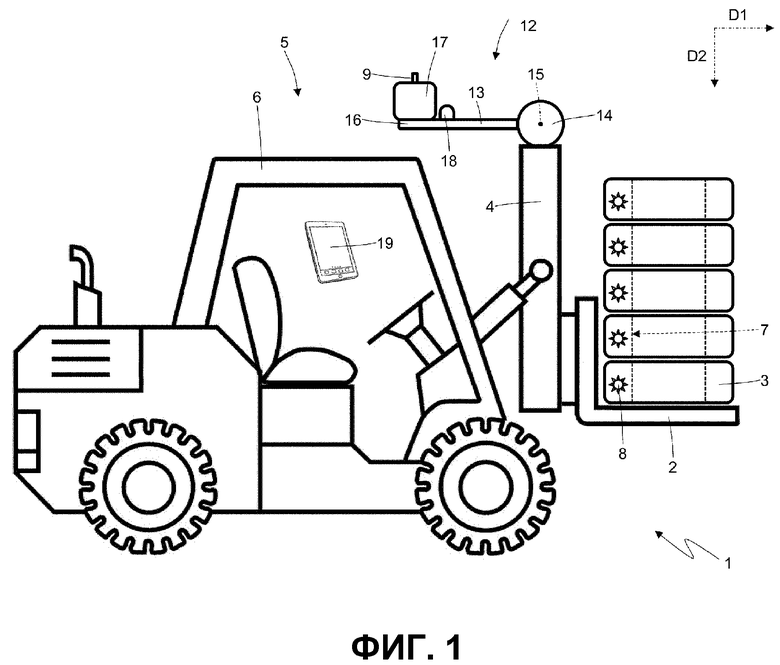
1. Вилочный погрузчик (1) для перемещения пневматических шин (3), снабженных транспондером (8), содержащий
захватывающее устройство (2), выполненное с возможностью подбора стопки пневматических шин (3), каждая из которых имеет центральную полость (7) и транспондер (8); и
считывающее устройство (9), снабженное антенной (11) и выполненное с возможностью обмена данными с транспондерами (8) пневматических шин (3);
вилочный погрузчик (1), отличающийся тем, что содержит блок (12) смещения, поддерживающий по меньшей мере одну антенну (11) считывающего устройства (9) и выполненный с возможностью перемещения указанной антенны (11) между положением ожидания, в котором антенна (11) расположена на определенном расстоянии от стопки пневматических шин (3), переносимых захватывающим устройством (2), и рабочим положением, в котором антенна (11) расположена в непосредственной близости от стопки пневматических шин (3), переносимых захватывающим устройством (2).
2. Вилочный погрузчик (1) по п. 1, в котором рабочее положение антенны (11) считывающего устройства (9) находится в центральных полостях (7) пневматических шин (3).
3. Вилочный погрузчик (1) по любому из пп. 1, 2, в котором блок (12) смещения выполнен с возможностью перемещения антенны (11) считывающего устройства (9) как вдоль горизонтального направления (D1), так и вдоль вертикального направления (D2), перпендикулярного горизонтальному направлению (D1).
4. Вилочный погрузчик (1) по п. 3, в котором блок (12) смещения выполнен с возможностью перемещения антенны (11) считывающего устройства (9) по существу вдоль горизонтального направления (D1) для перемещения считывающего устройства (9) ближе или дальше относительно стопки пневматических шин (3), и перемещения антенны (11) считывающего устройства (9) вдоль вертикального направления (D2) для сдвига считывающего устройства (9) вдоль стопки пневматических шин (3).
5. Вилочный погрузчик (1) по любому из пп. 1-4, в котором блок (12) смещения содержит рычаг (13), первый конец которого прикреплен шарнирно, для поворота относительно горизонтальной оси (15) поворота, а второй конец (16) которого, противоположный первому концу, удерживает считывающее устройство (9).
6. Вилочный погрузчик (1) по п. 5, в котором блок (12) смещения содержит телескопический элемент (17), выполненный с возможностью линейного перемещения и установленный на втором конце (16) рычага (13) и непосредственно удерживающий антенну (11) считывающего устройства (9).
7. Вилочный погрузчик (1) по любому из пп. 1-6, в котором блок (12) смещения выполнен с возможностью поворота антенны (11) считывающего устройства (9) относительно его продольной оси.
8. Вилочный погрузчик (1) по любому из пп. 1-7, в котором предусмотрена кабина (5) водителя, закрытая сверху крышей (6), при этом блок (12) смещения установлен на крыше (6) кабины (5) водителя.
9. Вилочный погрузчик (1) по любому из пп. 1-7, в котором предусмотрен несущий элемент (4), на котором установлено с возможностью сдвига захватывающее устройство (2), при этом блок (12) смещения установлен сверху несущего элемента (4).
10. Вилочный погрузчик (1) по любому из пп. 1-9, в котором считывающее устройство (9) содержит антенну (11) и компонент (10) передачи, при этом только антенна (11) считывающего устройства (9) установлена на блоке (12) смещения для перемещения во время передвижения самого блока (12) смещения между положением ожидания и рабочим положением.
11. Вилочный погрузчик (1) по любому из пп. 1-9, в котором считывающее устройство (9) содержит антенну (11) и компонент (10) передачи, при этом считывающее устройство (9) целиком установлено на блоке (12) смещения для перемещения во время передвижения самого блока (12) смещения между положением ожидания и рабочим положением.
12. Вилочный погрузчик (1) по любому из пп. 1-11, который содержит камеру (18), расположенную рядом со считывающим устройством (9) и приспособленную для получения кадра стопки пневматических шин (3), когда считывающее устройство (9) находится в рабочем положении.
13. Вилочный погрузчик (1) по любому из пп. 1-12, который содержит компьютер (19), который выполнен с возможностью приема от оператора вилочного погрузчика (1) количества пневматических шин (3), загруженных на захватывающее устройство (2), и с возможностью приема от считывающего устройства (9) количества считанных транспондеров (8), и с возможностью проверки того, что количество пневматических шин (3), загруженных на захватывающее устройство (2), равно количеству считанных транспондеров (8), и с возможностью генерирования сигнала ошибки, если количество пневматических шин (3), загруженных на захватывающее устройство (2), отличается от количества считанных транспондеров (8).
| СИСТЕМА РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ СО СРЕДСТВАМИ ДЛЯ РАЗЛИВКИ ПОД ДАВЛЕНИЕМ ДЛЯ ЛИТЫХ СТАЛЬНЫХ КОЛЕС | 2017 |
|
RU2733639C2 |
| US 2014197926 A1, 17.07.2014 | |||
| US 7612673 B2, 03.11.2009 | |||
| Способ получения индантрона (N, N'-дигидро-1,2', 2,1'-антрахиноназина) | 1949 |
|
SU81716A1 |

