Область техники, к которой относится изобретение
Изобретение относится к области беспилотных транспортных средств, а именно к многофункциональным мобильным модулям, которые обеспечивают весь функционал системы автопилотирования.
Уровень техники
Из уровня техники известно множество различных систем транспортных средств с использованием камер, лидаров и прочих датчиков. Так, например, известен модуль датчиков (US 2022111801 A1, МПК: B60R11/04, опубл. 14.04.2022), который представляет собой многоцелевой корпус восприятия, который может включать в себя камеры и/или другие различные датчики. Корпус в сборе устанавливается на крыше транспортного средства, такого как грузовик с полуприцепом.
Недостатком данного технического решения является отсутствие конечного набора сенсорики, который будет установлен в корпус и отсутствие вычислительного оборудования внутри корпуса. В корпусе не предусмотрены системы очистки сенсоров, а также отсутствует возможность установки на крышу любого транспортного средства.
Также известна международная заявка (WO 2021137884 A1, МПК: B60W10/18, B60W10/20, B60W40/02, B60W40/105, B60W60/00, G01D11/24, G05D1/02, опубл. 08.07.2021), содержащая совокупность рекомендаций по созданию беспилотного транспортного средства, а именно описание вариантов расположения сенсоров по периметру различных машин и интеграции этих сенсоров в единые корпуса, включающие в себя камеры, радары, лидары. В частности, используются накрышный модуль, модуль на бампере, два модуля по бокам транспортного средства в задней части и два по бокам автомобиля в области капота. Помимо этого, содержится информация об изменениях, необходимых в автомобиле, а также об общих принципах управления автономным транспортным средством.
Недостаток данного технического решения заключается в том, что все предлагаемые корпуса требуют переработки для интеграции с конкретно выбранной моделью машины. Предлагаемый набор сенсоров подразумевает колоссальные мощности вычислительного оборудования для того, чтобы обрабатывать данные с сенсоров. В корпусах модулей не предусмотрены системы очистки сенсоров, и это при том, что часть корпусов находятся в зонах с очень высокой вероятностью быстрого загрязнения. Наличие нескольких модулей делает невозможной предварительную взаимную калибровку сенсоров.
Также известна система (CN 113677565 A, МПК: B60R11/04; B60W30/10; G01S13/86; G01S17/87; G01S17/89, опубл. 19.11.2021), представляющая собой узел бокового зеркала седельного тягача, который включает в себя узко-угольную камеру, имеющую поле зрения в направлении движения транспортного средства назад, камеру, поле зрения которой находится в направлении движения транспортного средства вперед, и третью — широкоугольную камеру, поле зрения которой перпендикулярно направлению движения транспортного средства вперед, и направленно вниз. Непрерывное поле зрения камеры охватывает по меньшей мере 180°. Так же узел содержит в себе, по меньшей мере, один радар, один лидар, а также инерциальный измерительный блок (IMU). Узел находится на рычаге, позволяющим вынести узел за габарит транспортного средства. Задняя часть узла является зеркалом заднего вида для водителя.
Недостаток данного технического решения заключается в том, что разработанный узел можно поставить только на определенные модели грузовиков из-за его конструктива. Данный узел не содержит в себе вычислительного оборудования и не может использоваться в отрыве от транспортного средства с дополнительными вычислительными мощностями на борту. Помимо этого, в узле не предусмотрено никаких систем очистки сенсоров, которые будут загрязняться. Расположение центральной камеры, сильно наклоненной к низу, уменьшает дальность обзора камерами в бок. Наличие правого и левого модуля делает невозможной предварительную взаимную калибровку сенсоров.
Известны также беспилотные легковые автомобили с накрышным модулем, оснащенные радаром, лидаром, камерами вокруг сторон автомобиля, инерционными датчиками и приемником GNSS (см. на сайте в интернете: https://smartcar.starline.ru/bespilotnie-avtomobili-dla-nachinajushih/?ysclid=l9zn0nzbrp3973689.
Недостатком данных конструкций автомобилей является то, что они предназначены только для установки на легковых автомобилях, где вся сенсорная часть расположена отдельно на крыше, а не в модуле, а вычислительная часть - внутри автомобиля, при этом установка модуля на крышу осуществляется только после частичной разборки автомобиля, поэтому установка таких модулей становится затруднительной.
За прототип взят корпус мобильного модуля для беспилотного транспортного средства (RU 205648 U1, B60W 60/00, опубл. 26.07.2021), состоящий из верхней и нижней облицовки между которыми имеется каркас из алюминиевых труб, жестко соединенных между собой сваркой. С двух боковых сторон нижней облицовки имеются элементы крепления для возможности крепления к крыше кабины транспортного средства. На несущем каркасе модуля на одной из его боковых сторон и в передней части с помощью кронштейнов установлены камеры. В центральной передней части установлен 2D-лидар. На боковых сторонах каркаса закреплены боковые лидары, и камеры. На выступающей средней части каркаса установлен 3D-лидар через регулируемый поворотный кронштейн. В средней части каркаса расположен вычислительный блок.
Недостатками данного технического решения являются отсутствие интегрированных систем очисток сенсоров, отсутствие защиты от перегрева вычислительного оборудования, а также большие габариты и возможность установки только на крупные грузовые автомобили.
Раскрытие сущности изобретения
Технической задачей заявляемого технического решения является разработка многофункционального мобильного модуля для автоматического управления транспортным средством.
Техническим результатом заявляемого технического решения является возможность установки многофункционального мобильного модуля на крышу любого транспортного средства для превращения его в беспилотное транспортное средство, обеспечивая весь функционал системы автопилотирования в едином модуле, обеспечение работоспособности этого модуля в широком диапазоне температур окружающей среды (от -40 до +50°С), а также в широком диапазоне погодных условий (дождь, ливень, снег) благодаря системе обеспечения теплового режима (СОТР), а также наличию интегрированных в корпус систем очистки сенсоров.
Указанный технический результат достигается при помощи заявленного многофункционального мобильного модуля для автоматического управления транспортным средством, состоящего из рамы (1), выполненной из металлического профиля, на которую установлены металлические кронштейны с закреплёнными на них камерами (2, 3), лидаром (4) и наружной обшивкой, кроме того, посредством кронштейнов на раму (1) установлена рамка (47) с контуром уплотнения (48) по периметру, причем в качестве наружной обшивки модуль содержит фронтальную (53), заднюю (54), боковые (50, 51), нижнюю (49) и верхнюю, представляющую собой капот (30), состоящий из нижнего (31) и верхнего слоя, и содержащий автомобильные замки (61) и газлифты (62) для фиксации капота (30) в открытом положении, детали обшивки, при этом во фронтальную деталь обшивки (53) вклеено лобовое стекло модуля (60), пропускающее лазерное излучение лидара (4), а по периметру боковых деталей обшивки (50, 51) установлены уплотнители (52), обеспечивающие герметизацию модуля при монтаже и фиксации фронтальной детали обшивки (53) и задней детали обшивки (54), причем к боковым деталям обшивки (50, 51), через уплотнители (55), смонтированы уши обшивки (56, 57), в которые вклеены стекло малое переднее (58) и стекло малое заднее (59), в свою очередь, обшивка в сборе образует замкнутый, герметичный объем, который обслуживается системой обеспечения теплового режима, при этом вся обшивка выполнена из радиопрозрачного композитного материала, кроме того, на раму посредством металлических кронштейнов установлены инерциальная навигационная система (5), вычислители (14) системы автоматического управления транспортным средством, сетевые коммутаторы (15, 16), аппаратный синхронизатор времени (18), при этом в капот (30) интегрирован приемник глобальной спутниковой навигационной системы (6), а в верхней части по бокам рамы установлены GSM антенны (19), кроме того, под GSM антеннами (19) расположены циркуляционные вентиляторы (32) и, установленные перед вентиляторами (32), нагреватели (33), при этом, в центральной части рамы расположены колодки питания (21, 22) и два DC-DC преобразователя (20) с входной защитой от некорректного подключения полюсов, защитой от перенапряжения и защитой от короткого замыкания, в свою очередь, во фронтальной части рамы (1) закреплены щетки стеклоочистителей (37), причем в левой фронтальной части рамы установлен привод стеклоочистителей (35), при этом на фронтальную деталь обшивки (53) рамы (1) установлены дневные ходовые огни (63), кроме того, в задней правой части рамы (1) установлен бачок с омывающей жидкостью (38), который заправляется через горловину (39), при этом рядом с бачком установлена помпа (40), которая посредством системы трубок подает омывающую жидкость в форсунки (41), расположенные в верхней части фронтальной детали обшивки (53), которые распыляют омывающую жидкость на лобовое стекло модуля (60), кроме того, посредством пневматического клапана (42), расположенного в левой части рамы (1), стравливается воздух на лобовое стекло (60) через сопла (43), расположенные рядом с форсунками (41), обеспечивая очистку лобового стекла (60) перед сенсорами, при этом задняя часть рамы (1) содержит контроллер управления периферией (34), приточные вентиляторы (23), которые через полипропиленовые фильтры (24) нагнетают воздух с улицы в коллектор (25), создавая там избыточное давление и стравливая через сопла (26, 27), расположенные в коллекторе (25) системы обеспечения теплового режима, воздух на радиаторы наиболее горячих устройств модуля, вытяжные вентиляторы (28), вытягивающие через воздуховоды (29) воздух из пространства между нижним (31) и верхним слоем капота (30) на улицу через полипропиленовые фильтры (24), причем в заднюю деталь обшивки (54) установлены стробоскопы (64) для привлечения внимания окружающих людей, кроме того на нижней детали обшивки (49) находятся присоединительные площадки (65) для крепления модуля к транспортному средству, при этом для подключения модуля к бортовой сети питания, а также к бортовой шине CAN транспортного средства, на нижней детали обшивки (49), в углублении, находится панель разъемов (66).
Краткое описание чертежей
На фиг. 1 изображено расположение и установка всех сенсоров модуля, где
1 – Рама
2 – Камера среднего разрешения
3 – Камера высокого разрешения
4 – Лидар
5 – Инерциальная навигационная система
6 – Приемник глобальной спутниковой навигационной системы (GNSS)
7 – Металлический кронштейн камеры передний
8 – Металлический кронштейн камеры передний боковой
9 – Металлический кронштейн камеры задний боковой
10 – Объектив широкоугольный
11 – Объектив узконаправленный
12 – Кронштейн инерциальной навигационной системы.
На фиг. 2 изображено расположение и установка оборудования внутри модуля, где
1 – Рама
13 – Кронштейн вычислителей
14 – Вычислитель
15 – Коммутатор сетевой 1
16 – Коммутатор сетевой 2
17 – Кронштейн для коммутаторов
18 – Аппаратный синхронизатор времени
19 – GSM антенна
20 – DC-DC преобразователь
21 – Колодка питания малая
22 – Колодка питания большая.
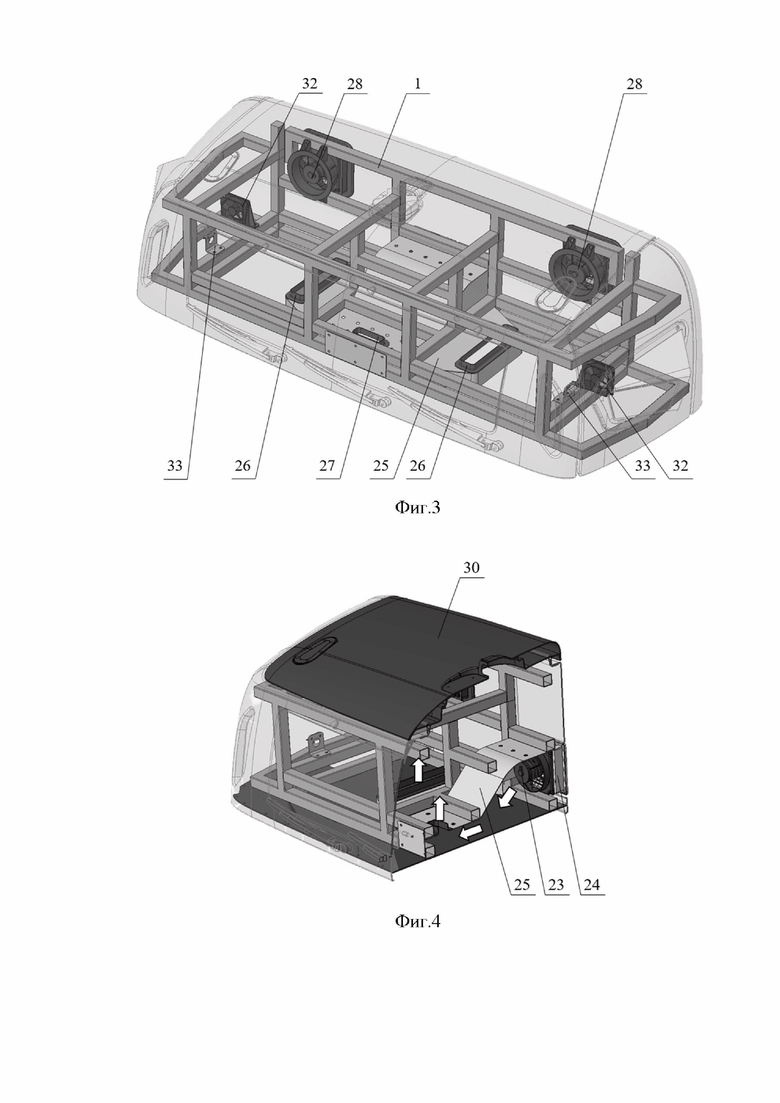
На фиг. 3 изображено расположение и установка, а также приведены принципы работы СОТР, где
1 – Рама
25 – Коллектор системы СОТР
26 – Сопло большое
27 – Сопло малое
28 – Вентилятор вытяжной
32 – Вентилятор циркуляционный
33 – Нагреватель.
На фиг. 4 изображено расположение и установка, а также приведены принципы работы СОТР, где
23 –Вентилятор приточный
24 –Фильтр полипропиленовый
25 – Коллектор системы СОТР
30 – Деталь обшивки верхняя (капот).
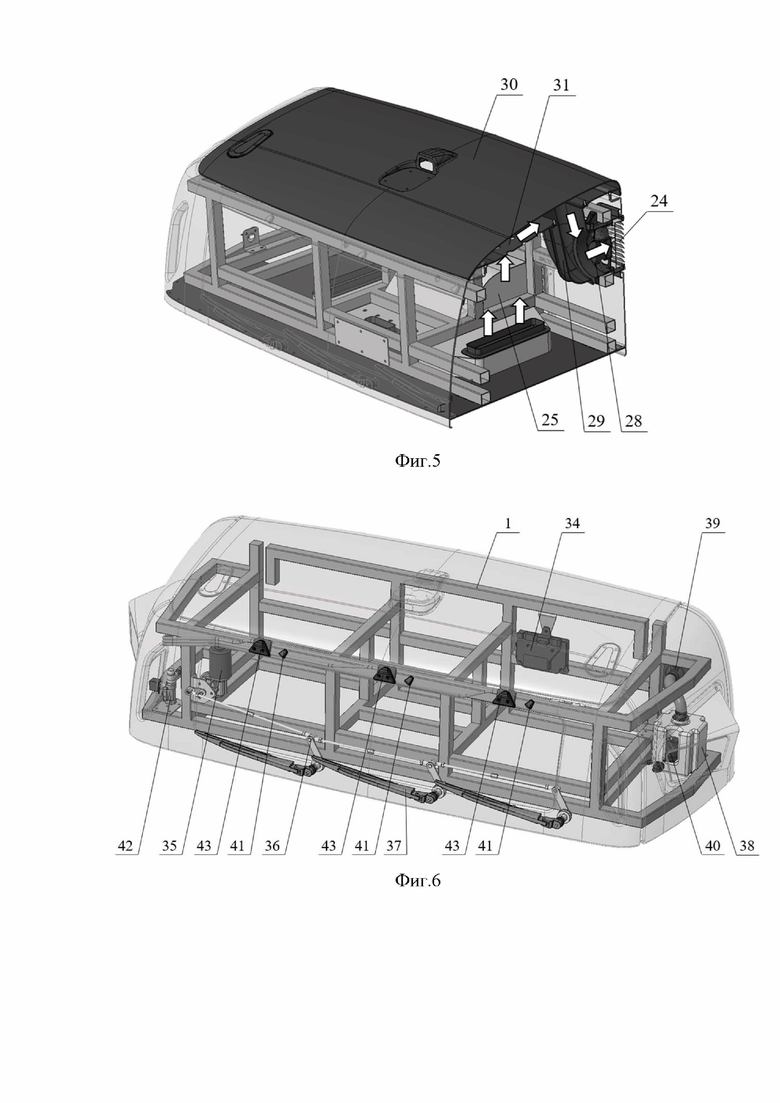
На фиг. 5 изображено расположение и установка, а также приведены принципы работы СОТР, где
24 – Фильтр полипропиленовый
25 – Коллектор системы СОТР
28 – Вентилятор вытяжной
29 – Воздуховод
30 – Деталь обшивки верхняя (капот)
31 – Нижний слой капота.
На фиг. 6 изображено расположение и установка систем очистки сенсоров, где
1 – Рама
34 – Контроллер управления периферией
35 – Привод стеклоочистителей
36 – Трапеция стеклоочистителей
37 – Щетка стеклоочистителя
38 – Бачок с омывающей жидкостью
39 – Горловина
40 – Помпа
41 – Форсунки
42 – Клапан пневматический
43 – Сопло.
На фиг. 7 изображена установка обшивки и контуров уплотнения, где
1 – Рама
30 – Деталь обшивки верхняя (капот)
44 – Кронштейн обшивки передний
45 – Кронштейн обшивки боковой
46 – Кронштейн обшивки задний
47 – Рамка
48 – Контур уплотнения
49 – Деталь обшивки нижняя
50 – Деталь обшивки правая боковая
51 – Деталь обшивки левая боковая
52 – Уплотнитель 1
53 – Деталь обшивки фронтальная
54 – Деталь обшивки задняя
55 – Уплотнитель 2
56 – Ухо обшивки правое
57 – Ухо обшивки левое
58 – Стекло малое переднее
59 – Стекло малое заднее
60 – Стекло модуля лобовое
61 – Замок.
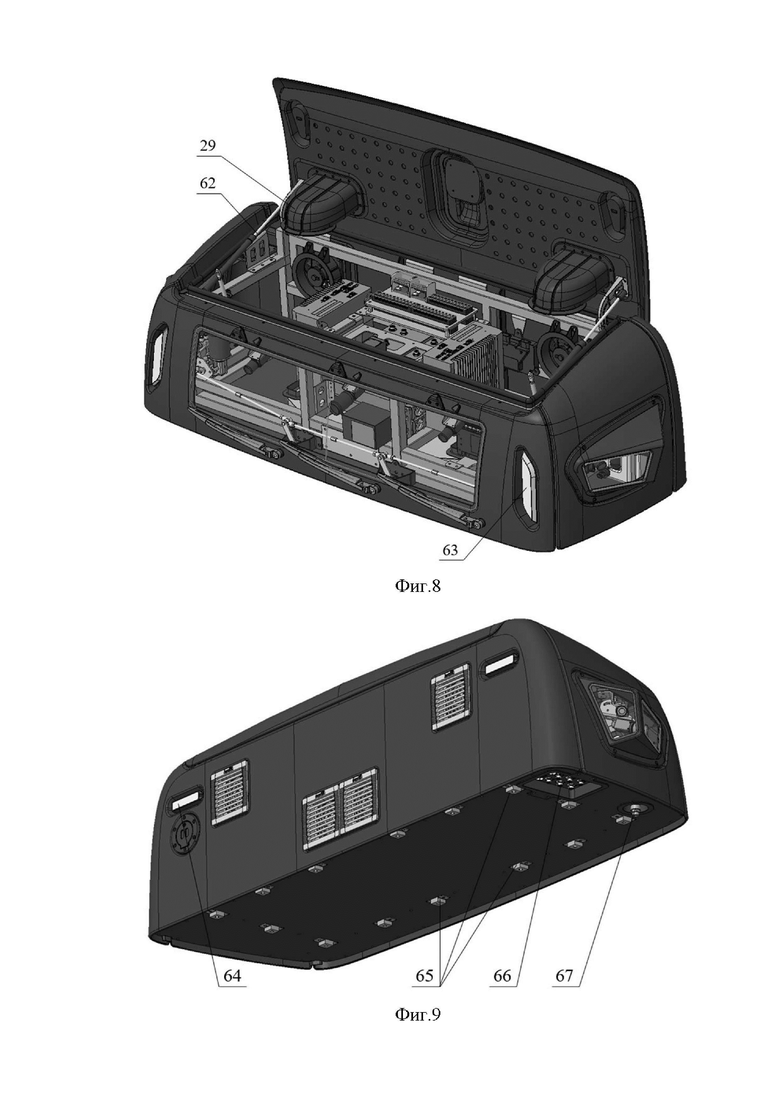
На фиг. 8 изображен модуль в сборе с открытым капотом, где
29 – Воздуховод
62 – Газлифт
63 – Фара (дневной ходовой свет).
На фиг. 9 изображены присоединительные элементы модуля, где
64 – Стробоскоп
65 – Присоединительные площадки
66 – Панель разъемов
67 – Быстросъемный фитинг.
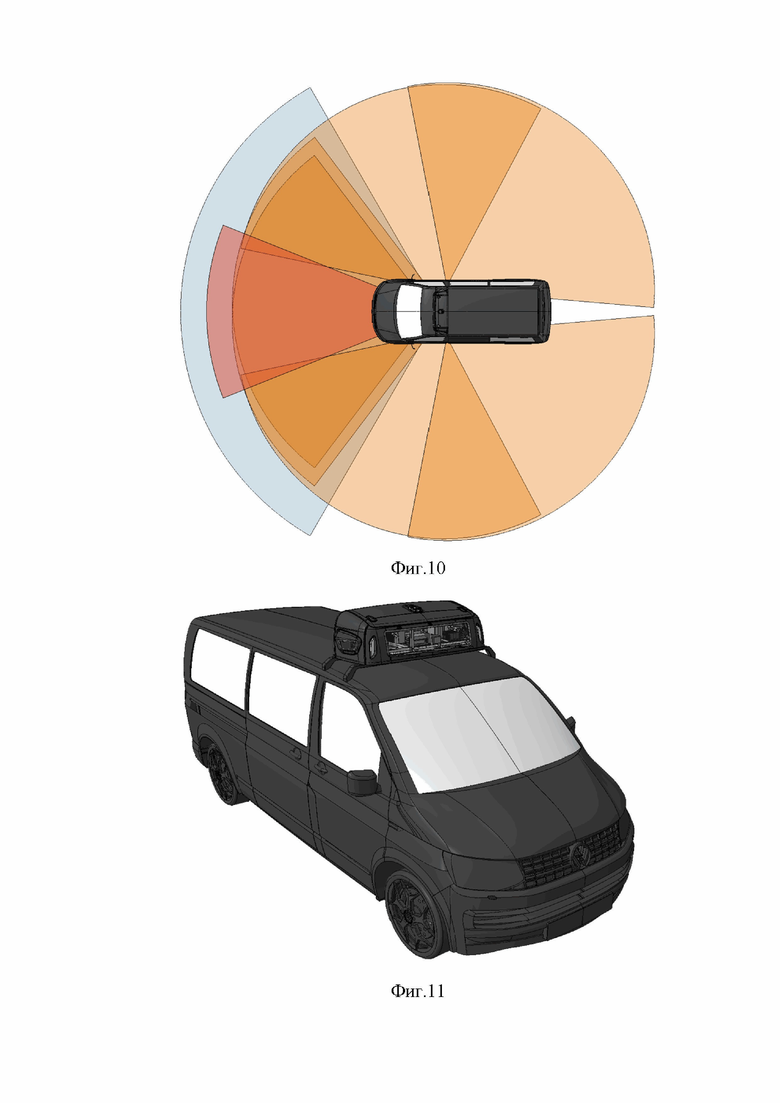
На фиг. 10 изображены зоны видимости сенсоров на модуле.
На фиг. 11 изображен модуль, установленный на автомобиль.
Осуществление изобретения
Многофункциональный мобильный модуль для автоматического управления транспортным средством состоит из рамы (1), выполненной из металлического профиля, на которую установлены металлические кронштейны с закреплёнными на них винтовым соединением сенсорами (камеры, лидар, инерциальная навигационная система, приемник глобальной навигационной спутниковой системы (GNSS)), оборудованием (вычислители, вентиляторы, нагреватели, сетевые коммутаторы, контроллер управления периферией, GSM (глобальная система мобильной связи) антенны, компоненты системы очистки сенсоров) и наружной обшивкой, которая так же крепится на раму (1).
Сенсорами, на основании данных с которых решаются задачи автоматического управления транспортным средством, являются: камеры (2, 3), лидар (4), инерциальная навигационная система (5), приемник глобальной спутниковой навигационной системы (6) (см. фиг. 1).
Камеры устанавливаются на металлические кронштейны (7, 8, 9) при помощи винтового соединения. Данные кронштейны позволяют делать регулировку камер по азимуту и тангажу, а также обеспечивают отвод тепла от камер. Камеры расположены по азимуту так, чтобы обеспечить покрытие в 360° вокруг модуля и взаимные перекрытия зон видимости в местах стыковки (см. фиг. 10). Помимо этого, вперед смотрят камеры с разным разрешением (2, 3) и разными объективами (10, 11), чтобы присутствовала возможность эффективно детектировать препятствия как в ближнем, так и в дальнем диапазоне (см. фиг. 1).
Инерциальная навигационная система (5) посредством кронштейна (12) жестко установлена на раму (1) (см. фиг. 1).
Место установки лидара (4) на раму (1) в центральной части модуля обеспечивает покрытие лучами лидара наиболее опасной зоны перед транспортным средством (см. фиг. 1).
Расположение в верхней части модуля (интегрирован в двухслойный капот (30)) приемника глобальной спутниковой навигационной системы (6), позволяет минимизировать потери полезного спутникового сигнала (см. фиг. 1).
Вычислители (14) для обработки данных с сенсоров и решения задачи автоматического управления на основе этих данных с помощью кронштейнов (13) установлены на раму (1). Сетевые коммутаторы (15, 16), обеспечивающие подключения сенсоров, так же крепятся к раме (1). На кронштейне (17), рядом с сетевыми коммутаторами (16), расположен аппаратный синхронизатор времени (18), который обеспечивает все компоненты системы единым временем (см. фиг. 2).
В верхней части по бокам рамы (1) установлены GSM антенны (19), обеспечивающие модуль приемом 4G сигнала (см. фиг. 2).
В центральной части рамы снизу расположены два DC-DC преобразователя (20) с входной защитой от некорректного подключения полюсов, защитой от перенапряжения и защитой от короткого замыкания. Вместе с колодками питания (21, 22) DC-DC преобразователи (20) являются основой системы электропитания модуля (см. фиг.2).
СОТР состоит их различных вентиляторов, обеспечивающих непрерывный продув модуля воздухом с улицы посредством воздуховодов. Приточные вентиляторы (23) через полипропиленовые фильтры (24) нагнетают воздух с улицы в коллектор системы СОТР (25), создавая там избыточное давление. Воздух через сопла (26, 27) стравливается на радиаторы наиболее горячих устройств (см. фиг. 3). Вытяжные вентиляторы (28) через воздуховоды (29) вытягивают воздух из пространства между слоями (верхним и нижним) капота (30) на улицу. Так как нижний слой капота (31) перфорированный, достигается постоянная циркуляция воздуха в системе (см. фигуру 4, 5). После вытяжных вентиляторов (28) также установлены полипропиленовые фильтры (24) для того, чтобы избежать попадания пыли во внутрь модуля.
В боковых частях рамы (1) расположены циркуляционные вентиляторы (32) и нагреватели (33), установленные перед ними (см. фиг. 3).
Во фронтальной части рамы (1), слева, установлен привод стеклоочистителей (35), который приводит в движение трапецию стеклоочистителей (36), на которую, в свою очередь, закреплены щетки стеклоочистителей (37) (см. фиг. 6).
В задней части рамы (1), справа, установлен бачок с омывающей жидкостью (38), которой заправляется через горловину (39). Рядом с бачком установлена помпа (40), которая посредством системы трубок подает омывающую жидкость в форсунки (41), расположенные в верхней фронтальной части передней детали обшивки, и распыляет омывающую жидкость на лобовое стекло модуля (60) (см. фиг. 6).
Модуль имеет возможность подключаться к компрессору внешней пневматической системы посредством быстросъемного фитинга (67) и, благодаря управлению пневматическим клапаном (42), расположенным в левой части рамы с помощью металлического кронштейна, стравливать воздух на лобовое стекло (60), через сопла (43), обеспечивая очистку зон перед сенсорами (см. фиг. 6).
Все системы очистки, вентиляторы и нагреватели управляются контроллером периферии (34), расположенным в задней части рамы модуля.
Посредством кронштейнов (44, 45, 46) на раму (1) установлена рамка (47) с контуром уплотнения (48) по периметру. Снизу на раму (1) устанавливается деталь обшивки нижняя (49). Боковые детали обшивки (50, 51) устанавливаются на раму сбоку и фиксируются посредством винтового соединения к кронштейнам (45, 46) и к кронштейну (44). По периметру боковых деталей обшивки установлены уплотнители (52), обеспечивающие герметизацию модуля при монтаже и фиксации фронтальной детали обшивки (53), и задней детали обшивки (54). К боковым деталям обшивки (50, 51), через уплотнители (55) смонтированы уши обшивки (56, 57), в которые предварительно были вклеены стекло малое переднее (58) и стекло малое заднее (59). Во фронтальную деталь обшивки (53) вклеено специальное лобовое стекло модуля (60), пропускающее лазерное излучение лидара. Обшивка в сборе образует замкнутый, герметичный объем, который обслуживается СОТР. Вся обшивка выполнена из радиопрозрачного композитного материала (например, стеклопластика) (см. фиг. 7).
Для удобства обслуживания капот модуля (30) можно открыть (см. фиг. 8). Капот (30) снабжен автомобильными замками (61) для того, чтобы ограничить доступ к внутренностям модуля неквалифицированному персоналу (см. фиг. 7). Для удобства обслуживания капот (30) в открытом положении фиксируется газлифтами (62) (см. фиг. 8).
На фронтальную деталь обшивки (53) установлены фары (дневные ходовые огни) (63) (см. фиг. 8). В заднюю деталь обшивки (54) установлены стробоскопы (64) для привлечения внимания окружающих людей (см. фиг. 9).
На нижней детали обшивки находятся присоединительные площадки (65) для крепления модуля к транспортному средству. Для подключения модуля к бортовой сети питания, а также к бортовой шине CAN транспортного средства, на нижней детали обшивки, в углублении, находится панель разъемов (66).
Принцип действия осуществляется следующим образом.
После установки модуля на крышу кабины транспортного средства посредством универсального крепления и подключения к бортовой сети питания этого транспортного средства, а также к бортовой шине CAN (при поддержке), модуль начинает работу (см. фиг. 11).
Контроллер управления периферией (34) получает информацию о температуре и влажности внутри модуля и начинает процесс приведения модуля к температуре и влажности, необходимым для включения остального оборудования (прогрев или воздушный продув)
Продув обеспечивается включением приточных вентиляторов (23), которые нагнетают воздух с улицы в коллектор системы СОТР (25). Воздух из коллектора системы СОТР (25) через сопла (26, 27) стравливается на радиаторы устройств, требующих охлаждение. Вытяжные вентиляторы (28) с помощью воздуховодов (29), расположенных на двухслойном капоте (30), вытягивают воздух из пространства между слоев капота наружу модуля, обеспечивая полный продув объёма (см. фиг. 4, 5).
По достижению заданной температуры контроллер управления периферией (34) включает всё остальное оборудование модуля. При этом СОТР продолжает регулировать температуру.
Во время эксплуатации модуля контроллер управления периферией (34) получает сигнал от вычислителя (14) о загрязнении сенсоров, и при необходимости активирует различные режимы очистки сенсоров (в зависимости от типа загрязнения и от обратной связи с датчиков)
Таким образом, заявляемый многофункциональный мобильный модуль реализует весь функционал, необходимый для системы автоматического управления транспортным средством, а связка контроллера управления периферии, СОТР и систем очистки сенсоров обеспечивают бесперебойную работу модуля в самых разных погодных условиях. Это, а также наличие минимальных необходимых коммуникаций с бортовой сетью и универсальное крепление позволяют установить модуль на кабину любого транспортного средства, кроме того, при наличии доступа к CAN шине транспортного средства управлять им, а при отсутствии, обеспечивать пользователя расширенной информацией об окружающей обстановке.
| название | год | авторы | номер документа |
|---|---|---|---|
| Универсальный блок управления автономного транспортного средства | 2023 |
|
RU2821225C1 |
| Передняя часть кузова транспортного средства | 1990 |
|
SU1794783A2 |
| МНОГОЦЕЛЕВАЯ БЕСПИЛОТНАЯ АВИАЦИОННАЯ РАКЕТНАЯ СИСТЕМА | 2022 |
|
RU2791754C1 |
| Устройство видеонаблюдения беспилотного воздушного судна, узел видеокамеры для такого устройства видеонаблюдения | 2023 |
|
RU2802978C1 |
| СПОСОБ МОНИТОРИНГА СОСТОЯНИЯ ЗИМНИХ АВТОДОРОГ | 2023 |
|
RU2809950C1 |
| Способ локализации и построения навигационных карт мобильного сервисного робота | 2020 |
|
RU2740229C1 |
| Блок обнаружения препятствий маневрового локомотива | 2023 |
|
RU2794079C1 |
| КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ ВЕРТОЛЕТА НА ОСНОВЕ ИНТЕГРИРОВАННОЙ МОДУЛЬНОЙ АВИОНИКИ | 2015 |
|
RU2605222C1 |
| АВТОМОБИЛЬ С ПОДУШКОЙ БЕЗОПАСНОСТИ ЛОБОВОГО СТЕКЛА | 2010 |
|
RU2527881C2 |
| Бортовое устройство позиционирования рельсового транспортного средства | 2023 |
|
RU2799734C1 |


Изобретение относится к многофункциональному мобильному модулю для автоматического управления транспортным средством. Модуль содержит раму. Рама выполнена из металлического профиля. Модуль содержит: камеры, лидар, инерциальную навигационную систему, вычислители системы автоматического управления транспортным средством, сетевые коммутаторы, аппаратный синхронизатор времени, GSM антенны, наружную обшивку и рамку с контуром уплотнения по периметру, приемник спутниковой навигационной системы, циркуляционные вентиляторы, нагреватели, колодки питания и два DC-DC преобразователя, стеклоочистители, дневные ходовые огни, бачок для стеклоомывающей жидкости, контроллер управления периферией, приточные и вытяжные вентиляторы, стробоскопы. Наружная обшивка модуля представляет собой капот, содержащий замки и газлифты для фиксации в открытом положении. Во фронтальную деталь обшивки вклеено лобовое стекло модуля, пропускающее лазерное излучение лидара. По периметру боковых деталей обшивки установлены уплотнители, обеспечивающие герметизацию модуля при монтаже. Обшивка в сборе образует замкнутый, герметичный объем, который обслуживается системой обеспечения теплового режима. Обшивка выполнена из радиопрозрачного композитного материала. На нижней детали обшивки находятся присоединительные площадки для крепления модуля к транспортному средству. Достигается создание многофункционального мобильного модуля для автоматического управления транспортным средством. 11 ил.
Многофункциональный мобильный модуль для автоматического управления транспортным средством, состоящий из рамы (1), выполненной из металлического профиля, на которую установлены металлические кронштейны с закреплёнными на них камерами (2, 3), лидаром (4) и наружной обшивкой, кроме того, посредством кронштейнов на раму (1) установлена рамка (47) с контуром уплотнения (48) по периметру, отличающийся тем, что в качестве наружной обшивки модуль содержит фронтальную (53), заднюю (54), боковые (50, 51), нижнюю (49) и верхнюю, представляющую собой капот (30), состоящий из нижнего (31) и верхнего слоев и содержащий автомобильные замки (61) и газлифты (62) для фиксации капота (30) в открытом положении, детали обшивки, при этом во фронтальную деталь обшивки (53) вклеено лобовое стекло модуля (60), пропускающее лазерное излучение лидара (4), а по периметру боковых деталей обшивки (50, 51) установлены уплотнители (52), обеспечивающие герметизацию модуля при монтаже и фиксации фронтальной детали обшивки (53) и задней детали обшивки (54), причем к боковым деталям обшивки (50, 51), через уплотнители (55), смонтированы уши обшивки (56, 57), в которые вклеены стекло малое переднее (58) и стекло малое заднее (59), в свою очередь, обшивка в сборе образует замкнутый, герметичный объем, который обслуживается системой обеспечения теплового режима, при этом вся обшивка выполнена из радиопрозрачного композитного материала, кроме того, на раму посредством металлических кронштейнов установлены инерциальная навигационная система (5), вычислители (14) системы автоматического управления транспортным средством, сетевые коммутаторы (15, 16), аппаратный синхронизатор времени (18), при этом в капот (30) интегрирован приемник глобальной спутниковой навигационной системы (6), а в верхней части по бокам рамы установлены GSM антенны (19), кроме того, под GSM антеннами (19) расположены циркуляционные вентиляторы (32) и установленные перед вентиляторами (32) нагреватели (33), при этом в центральной части рамы расположены колодки питания (21, 22) и два DC-DC преобразователя (20) с входной защитой от некорректного подключения полюсов, защитой от перенапряжения и защитой от короткого замыкания, в свою очередь, во фронтальной части рамы (1) закреплены щетки стеклоочистителей (37), причем в левой фронтальной части рамы установлен привод стеклоочистителей (35), при этом на фронтальную деталь обшивки (53) рамы (1) установлены дневные ходовые огни (63), кроме того, в задней правой части рамы (1) установлен бачок с омывающей жидкостью (38), который заправляется через горловину (39), при этом рядом с бачком установлена помпа (40), которая посредством системы трубок подает омывающую жидкость в форсунки (41), расположенные в верхней части фронтальной детали обшивки (53), которые распыляют омывающую жидкость на лобовое стекло модуля (60), кроме того, посредством пневматического клапана (42), расположенного в левой части рамы (1), стравливается воздух на лобовое стекло (60) через сопла (43), расположенные рядом с форсунками (41), обеспечивая очистку лобового стекла (60) перед сенсорами, при этом задняя часть рамы (1) содержит контроллер управления периферией (34), приточные вентиляторы (23), которые через полипропиленовые фильтры (24) нагнетают воздух с улицы в коллектор (25), создавая там избыточное давление и стравливая через сопла (26, 27), расположенные в коллекторе (25) системы обеспечения теплового режима, воздух на радиаторы наиболее горячих устройств модуля, вытяжные вентиляторы (28), вытягивающие через воздуховоды (29) воздух из пространства между нижним (31) и верхним слоями капота (30) на улицу через полипропиленовые фильтры (24), причем в заднюю деталь обшивки (54) установлены стробоскопы (64) для привлечения внимания окружающих людей, кроме того, на нижней детали обшивки (49) находятся присоединительные площадки (65) для крепления модуля к транспортному средству, при этом для подключения модуля к бортовой сети питания, а также к бортовой шине CAN транспортного средства на нижней детали обшивки (49), в углублении, находится панель разъемов (66).
| ШЛИФОВАЛЬНАЯ ЛЕНТА | 0 |
|
SU205648A1 |
| СПОСОБ ПОЛУЧЕНИЯ СИНТЕТИЧЕСКОГО ЭТИЛЕНПРОПИЛЕНОВОГО КАУЧУКА | 0 |
|
SU212174A1 |
| "БЕСПИЛОТНЫЕ АВТОМОБИЛИ ДЛЯ НАЧИНАЮЩИХ", 15.06.2021 | |||
| US 2020353876 A1, 12.11.2020. | |||

