Изобретение относится к области авиационной технике и касается определения дисбалансов, весовых и аэродинамических, несущих винтов (НВ) винтокрылых летательных аппаратов.
Задачи, решаемые данным изобретением:
- уменьшение уровня вибраций и нагрузок на винтокрылом летательном аппарате;
Известны способы определения и регулировки соконусности лопастей несущих винтов [А.М. Володко, М.П. Верхозин, В.А. Горшков. Вертолеты. Справочник по аэродинамике, динамике полета, конструкции, оборудованию и технической эксплуатации. М.: Военное издательство, 1992 - с. 552; с. 201], заключающиеся в фотографировании лопастей НВ или измерении расстояний между отпечатками, оставляемыми лопастями на рулоне бумаги при вращении несущего винта на земле.
Недостатком такого способа является небезопасность регулировки, а также невозможность регулировки соконусности винта в полете.
Также известны оптические методы регулировки несущих винтов (патенты RU 2180735 C1, RU93777 U1) и методы регулировки, основанные на измерении вибраций (патенты RU 2194959 C1, RU2441807 C1, RU 2628034 С1].
Недостатком таких способов является непрямой метод измерения и неоднозначность устранения причин вибраций (вызваны ли они аэродинамическими или массовыми различиями лопастей НВ в комплекте).
Наиболее близким к заявляемому техническому решению по технической сущности и достигаемому техническому результату является способ определения дисбаланса несущих винтов вертолета (патент RU 2247344).
Недостатком такого способа является невозможность сопоставить азимутальное положение лопасти с уровнем вибраций и тем самым как определить источник повышенных вибраций, так и его причину - массовый ли это дисбаланс или отличия в геометрии одной из лопастей в комплекте, приводящие к неодинаковости их аэродинамических характеристик.
Такой способ позволяет определить весовой дисбаланс лопастей НВ и требует проведения дополнительных полетов с контрольным известным дисбалансом. Кроме того, на амплитуды угловых перемещений фюзеляжа оказывают влияние не только различия в статических моментах лопастей несущего винта, но и искажения геометрии, отклонения крутки, углов установки и другие факторы неидентичности лопастей в комплекте, что служит источником повышенных вибраций, как следствия неидентичности лопастей в комплекте несущего винта, и нагрузок на конструкцию, неидентифицируемом в упомянутом изобретении.
Технической задачей изобретения является разработка способа определения и устранения неидентичности лопастей несущего винта в полете, повышающего точность определения наличия индивидуальных различий лопастей прямыми измерениями нагрузок на каждой лопасти, и позволяющего выполнить регулировку, объективно обеспечивающую минимальное значение уровня вибраций и нагрузок в полете.
Решение указанной задачи достигается тем, что осуществляется:
- измерение и регистрация действующих на каждую лопасть и (или) каждый рукав втулки несущего винта нагрузок путем выполнения тензометрирования характерных и одинаковых со стороны каждой лопасти мест конструкции в полете, сравнение полученных записей, и выполнение регулировки несущей системы, до достижения одинаковых со стороны всех лопастей средних за оборот и амплитудных значений нагрузок, передаваемых на втулку несущего винта;
- измерение шарнирных моментов со стороны каждой лопасти путем выполнения тензометрирования вращающихся элементов управления;
- измерение сил несущего винта на фюзеляже во время прохождения каждой лопасти путем выполнения тензометрирования фюзеляжа.
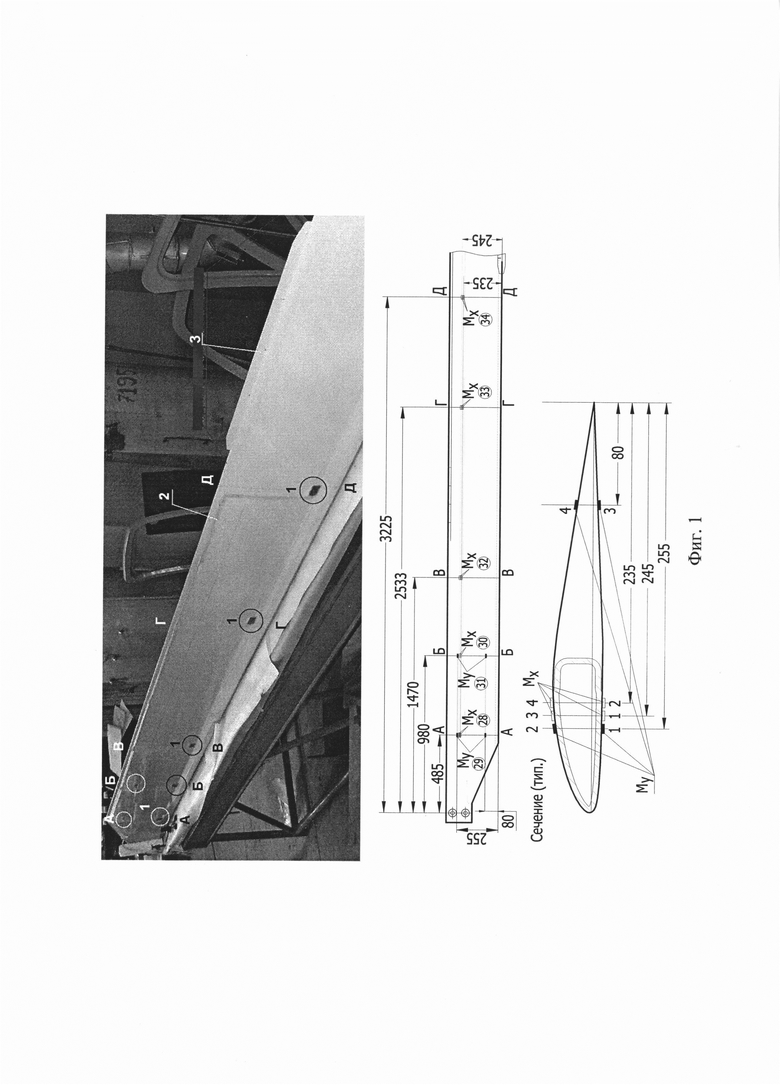
На фиг.1 представлено размещения тензодатчиков на лопасти НВ.
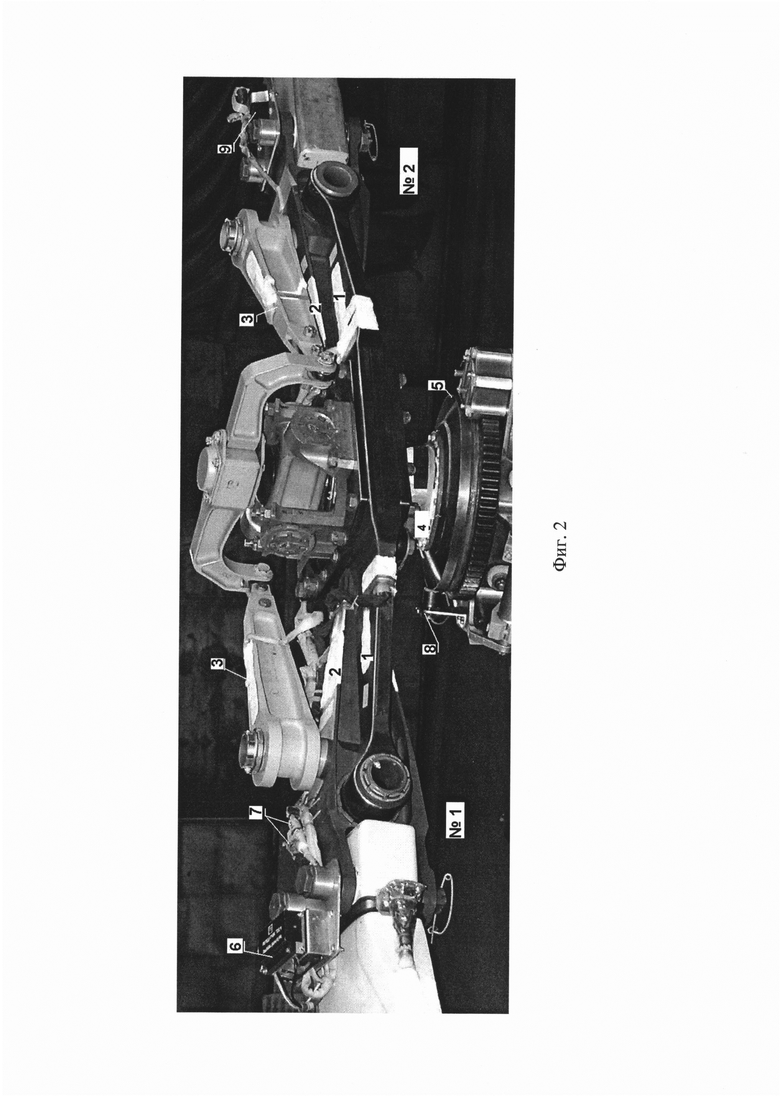
На фиг.2 представлено размещение измерительной аппаратуры на втулке НВ,
где: 1, 2, 3, 4 - тензодатчики, 5 - кольцевая антенна; 6 - передатчик Т02.1 с блоком защиты ТТ02-10; 7 - разъемы для переподключения вариантов тензометрирования, 8 - приемник ТТ02.3; 9 - аккумулятор.
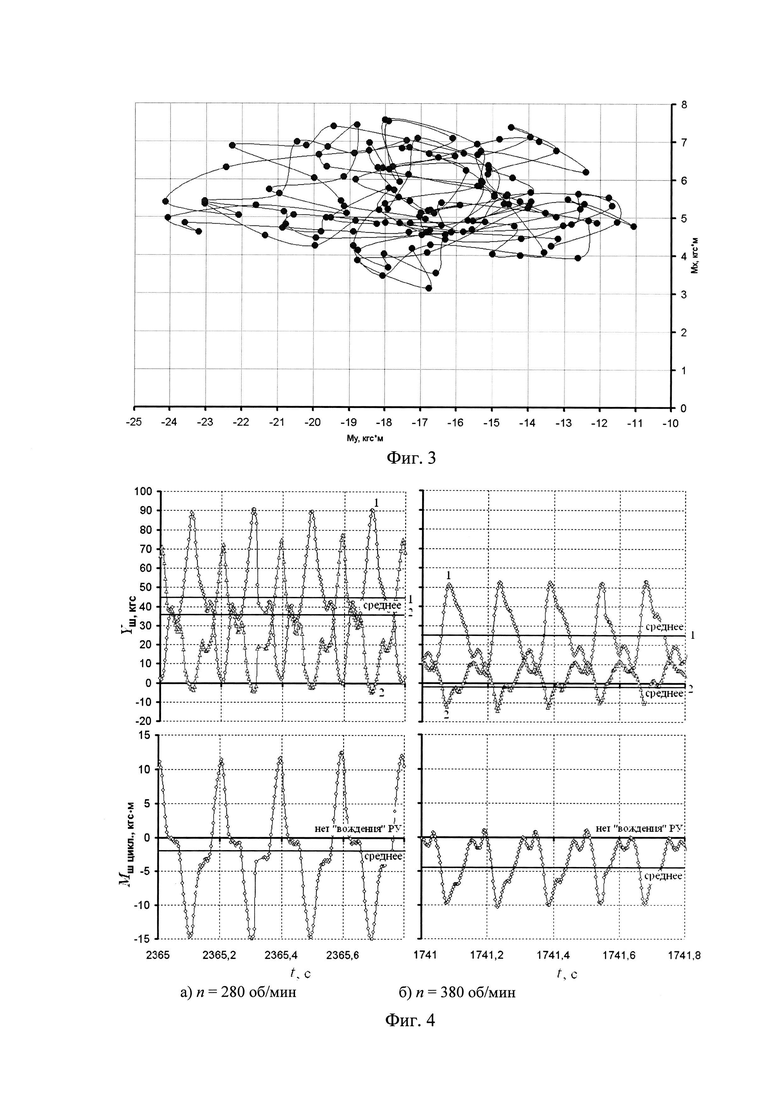
На фиг.3 представлен годограф изгибающих моментов в сечении лопасти (3 оборота несущего винта)
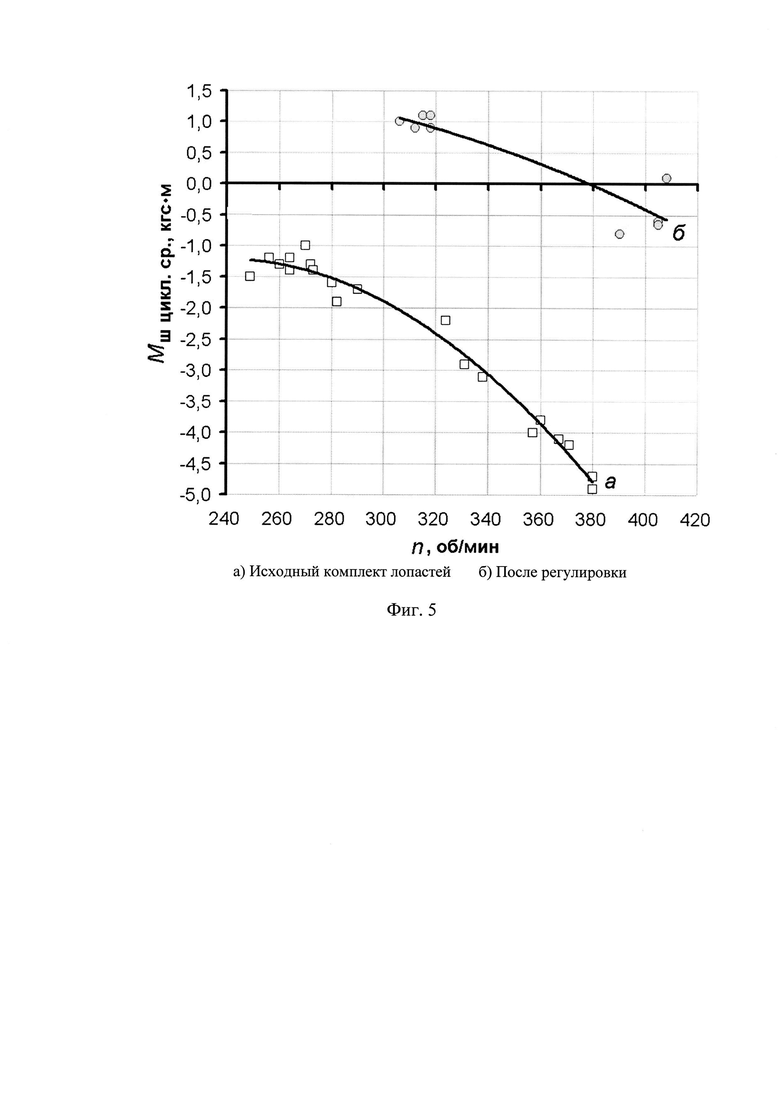
На фиг.4 представлены осциллограммы записи шарнирного момента,
V=120 км/ч
На фиг.5 представлена зависимость среднего шарнирного момента, нагружающего циклическое управление, от частоты вращения НВ и регулировок
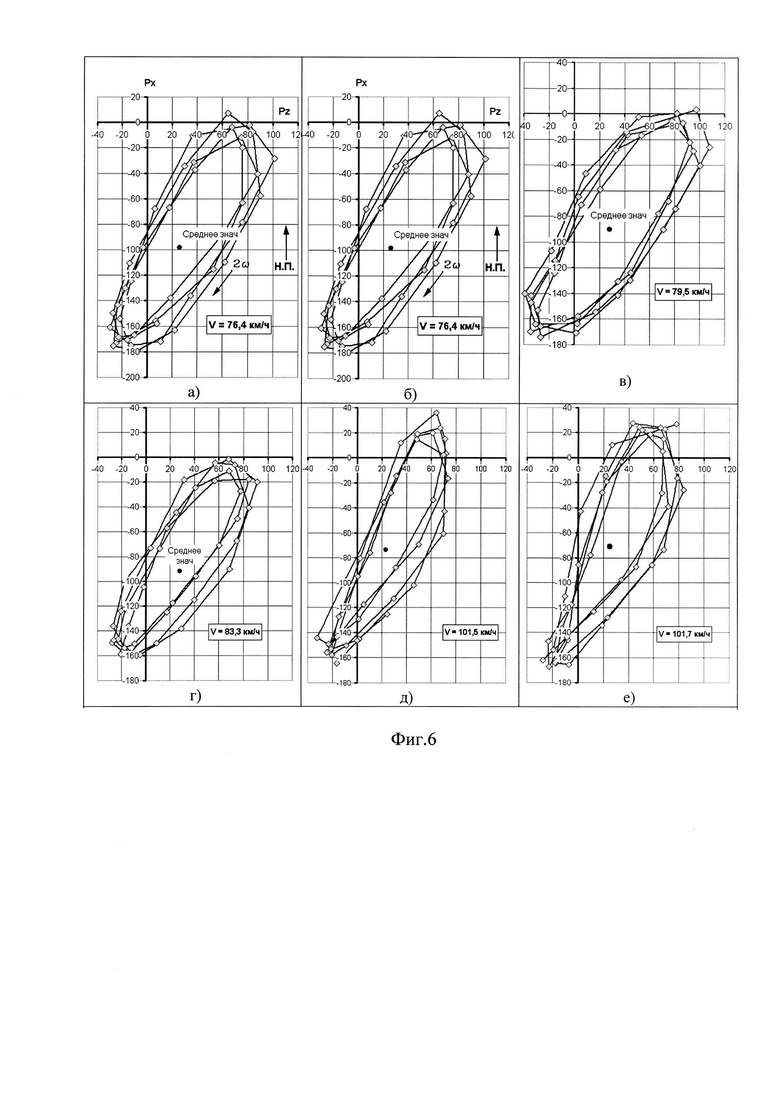
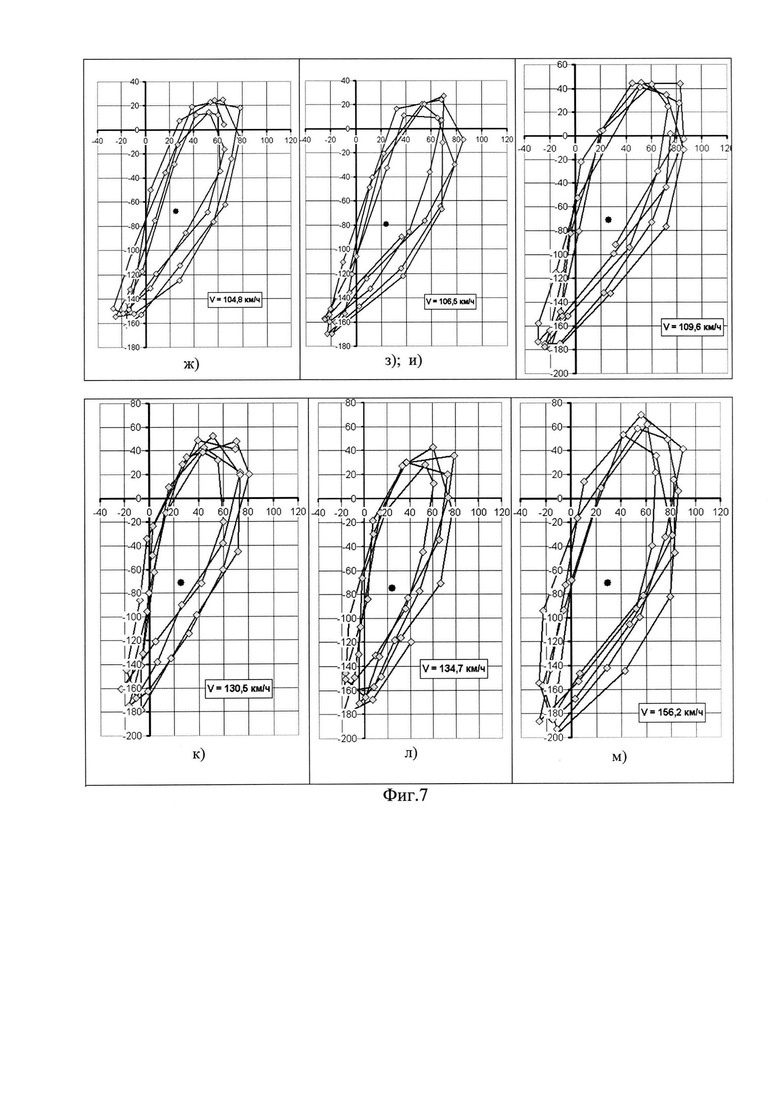
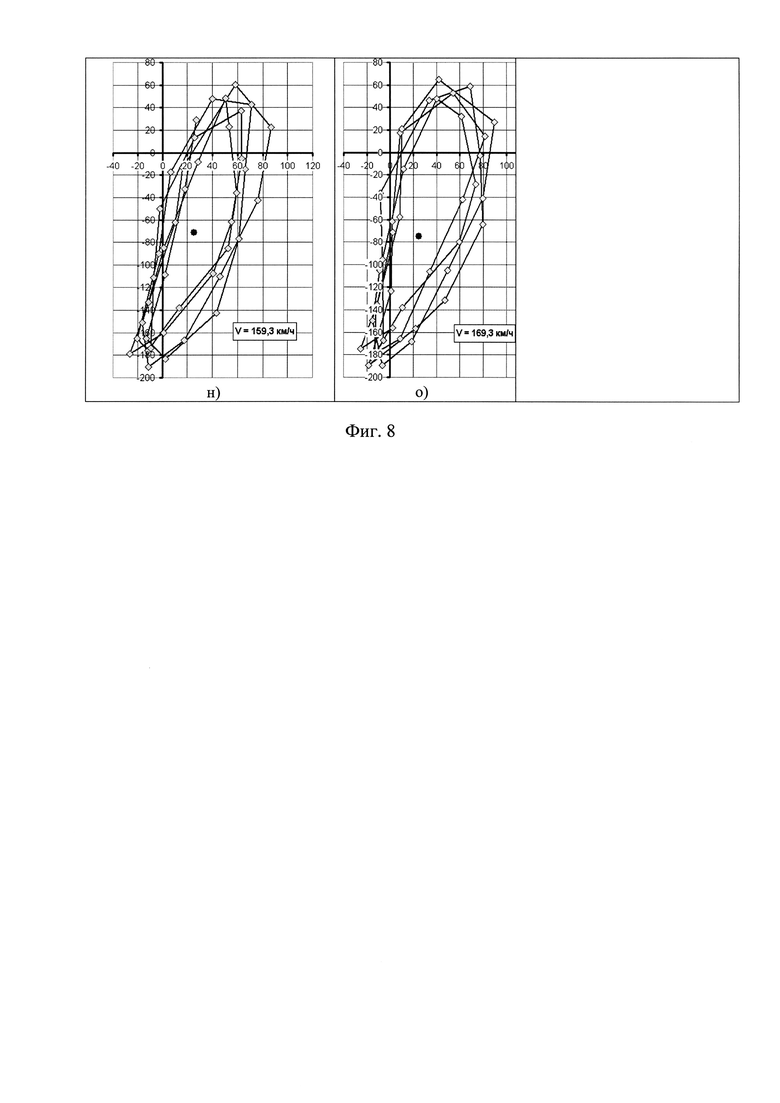
На фиг.6, 7 и 8 представлен годограф сил НВ на фюзеляже в установившемся горизонтальном полете (ГП),
где: Мх балки, Мх скобы, My скобы, Мх рычаг; Мкр. НВ
Описание сущности изобретения
Винтокрылый летательный аппарат оборудуют системой бортовых измерений и регистрации нагрузок в характерных местах (такими местами, как правило, являются комлевая часть лопасти, рукав втулки несущего винта, поводок для изменения угла установки лопасти) каждой лопасти и втулки НВ (фиг.1 и фиг.2).
Система бортовых измерений состоит из тензодатчиков, которыми препарированы упомянутые выше характерные места несущего винта, и телеметрического передатчика на вращающейся части несущего винта.
По беспроводному каналу сигнал разбаланса тензомоста передается на бортовую регистрирующую часть.
Сигнал разбаланса пропорционален нагрузкам, действующих в местах препарировки, поэтому перед выполнением измерений выполняется градуировка каждого измерительного канала в виде зависимости: Значение нагрузки - электрический сигнал разбаланса тензомоста.
Выполняют полет на установившихся режимах полета и сравнивают полученные значения нагрузок, передаваемые каждой лопастью. Различия в среднем за оборот и амплитудном значении нагрузок, передаваемых лопастями на втулку, свидетельствует о неодинаковости характеристик лопасти (массовых, геометрических, аэродинамических) - см. фиг 3-8.
На основании сравнения циклограмм нагрузок с каждой лопасти выполняют регулировки, в частности, отгибы триммерных пластин лопастей или индивидуальное изменение угла установки лопастей, после чего выполняют контрольные полеты и повторное сравнение, до достижения одинаковых у всех лопастей средних за оборот и амплитудных значений нагрузок, передаваемых на втулку НВ, что является объективным критерием достижения минимальной разноконусности лопастей НВ и минимального для данных условий полета уровня вибраций.
Техническим результатом является способ выполнения регулировки НВ определения и устранения индивидуальных различий лопастей несущего винта винтокрылого, обеспечивающий минимальное значение уровня вибраций Изобретение позволяет повысить точность определения наличия индивидуальных различий лопастей прямыми измерениями нагрузок на каждой лопасти и позволяет выполнить регулировку, объективно обеспечивающую минимальное значение уровня вибраций и нагрузок в полете, на любых режимах полета, возможных на винтокрылом летательном аппарате.
Записи СБИ свидетельствуют, что заявленная задача решена, цель достигнута, эффект получен.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ ЛОПАСТЕЙ НЕСУЩЕГО И РУЛЕВОГО ВИНТОВ ВЕРТОЛЕТА | 2016 |
|
RU2628034C1 |
| СПОСОБ УПРАВЛЕНИЯ ВЕРТОЛЕТОМ | 2016 |
|
RU2619679C9 |
| СПОСОБ ОПТИМИЗАЦИИ ШУМА, ПРОИЗВОДИМОГО ВСПОМОГАТЕЛЬНЫМ ВИНТОМ, И ХАРАКТЕРИСТИК ВИНТОКРЫЛОГО ЛЕТАТЕЛЬНОГО АППАРАТА, И ВИНТОКРЫЛЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2014 |
|
RU2601966C2 |
| ВЕРТОЛЁТ | 2018 |
|
RU2742513C2 |
| ВИНТОКРЫЛЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2015 |
|
RU2600966C1 |
| СКОРОСТНОЙ ГИБРИДНЫЙ ВЕРТОЛЕТ С БОЛЬШИМ РАДИУСОМ ДЕЙСТВИЯ | 2008 |
|
RU2473454C2 |
| СКОРОСТНОЙ ГИБРИДНЫЙ ВЕРТОЛЕТ С БОЛЬШИМ РАДИУСОМ ДЕЙСТВИЯ И ОПТИМИЗИРОВАННЫМ ПОДЪЕМНЫМ НЕСУЩИМ ВИНТОМ | 2008 |
|
RU2445236C2 |
| СПОСОБ СТАТИЧЕСКОЙ РЕГУЛИРОВКИ СОКОНУСНОСТИ ЛОПАСТЕЙ НЕСУЩЕГО ВИНТА ВЕРТОЛЁТА | 2023 |
|
RU2809683C1 |
| Несущая система винтокрылого летательного аппарата | 2020 |
|
RU2751654C1 |
| ВИНТОКРЫЛЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2020 |
|
RU2740718C1 |
Изобретение относится к области авиационной техники и касается определения дисбалансов весовых и аэродинамических несущих винтов (НВ) винтокрылых летательных аппаратов. Винтокрылый летательный аппарат оборудуется системой бортовых измерений (СБИ) и регистрации нагрузок в характерных местах сечений каждой лопасти и втулки НВ. Производятся измерение и регистрация действующих на каждую лопасть и/или каждый рукав втулки несущего винта нагрузок путем выполнения тензометрирования характерных и одинаковых со стороны каждой лопасти мест конструкции в полете. Производят сравнение полученных записей и выполняют регулировку несущей системы до достижения одинаковых со стороны всех лопастей средних за оборот и амплитудных значений нагрузок, передаваемых на втулку несущего винта. Дополнительно производится измерение шарнирных моментов со стороны каждой лопасти путем выполнения тензометрирования вращающихся элементов управления и измерение сил несущего фюзеляже во время прохождения каждой лопасти путем выполнения тензометрирования фюзеляжа. Обеспечивается повышение точности определения наличия индивидуальных различий лопастей и регулировки, объективно обеспечивающей минимальное значение уровня вибраций и нагрузок в полете. 8 ил.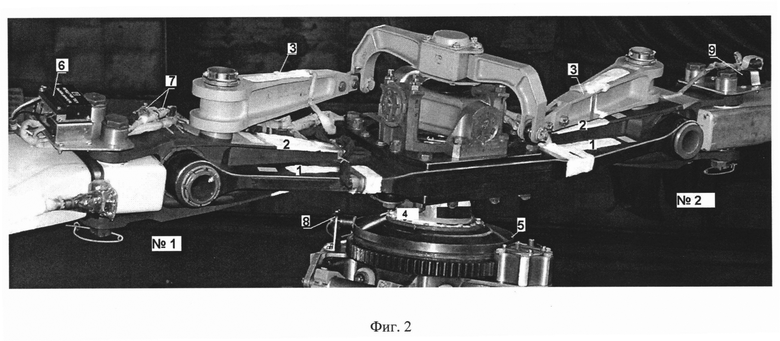
Способ определения и устранения индивидуальных различий характеристик лопастей несущего винта винтокрылого летательного аппарата, включающий в себя:
- измерение и регистрацию действующих на каждую лопасть и/или каждый рукав втулки несущего винта нагрузок путем выполнения тензометрирования характерных и одинаковых со стороны каждой лопасти мест конструкции в полете, сравнение полученных записей и выполнение регулировки несущей системы до достижения одинаковых со стороны всех лопастей средних за оборот и амплитудных значений нагрузок, передаваемых на втулку несущего винта;
- измерение шарнирных моментов со стороны каждой лопасти путем выполнения тензометрирования вращающихся элементов управления;
- измерение сил несущего винта на фюзеляже во время прохождения каждой лопасти путем выполнения тензометрирования фюзеляжа.
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИСБАЛАНСА НЕСУЩИХ ВИНТОВ ВЕРТОЛЕТА | 2003 |
|
RU2247344C1 |
| WO 1989001896 A1, 09.03.1989 | |||
| Стекло | 1973 |
|
SU477948A1 |
| Устройство для защиты электромагнитов от перегрева | 1954 |
|
SU101185A1 |
| CN 103693211 A, 02.04.2014 | |||
| Интегрированная система регистрации данных, диагностики технического и физического состояния комплекса "человек-машина" | 2019 |
|
RU2711109C1 |

