Область техники
Заявляемое техническое решение относится к экспериментальной физиологии и используется при исследовании нейрофизиологических механизмов обучения и памяти, пространственной навигации, двигательной и поисковой активности лабораторных животных при осуществлении ими целенаправленного пищедобывательного поведения, а также при тестировании когнитивных нарушений в модельных экспериментах на животных и может быть применено в экспериментальной фармакологии и экспериментальной медицине.
Уровень техники
Из уровня техники известны классические лабиринты для исследования пространственного выбора животного - это Т-лабиринт и его модификация Υ-лабиринт (Zhang, Q., Kobayashi, Y., Goto, Η., Itohara, S. An Automated T-maze Based Apparatus and Protocol for Analyzing Delay- and Effort-based Decision Making in Free Moving Rodents. J. Vis. Exp.(138), e57895, doi:10.3791/57895 (2018).) (Swonger AK, Rech RH (1972) Serotonergic and cholinergic involvement in habituation of activity and spontaneous alternation of rats in a Y maze. J Comp Physiol Psychol 81 (3):509-522). В этом лабиринте животное выбирает один из двух или один из трех рукавов на основании сигналов, прошлого выбора или просто исследовательского поведения.
Недостатком данных лабиринтов является малое (два или три варианта) количество доступных выборов, что не дает возможности сделать однозначный вывод об используемой животным стратегии выбора, что сказывается на результатах эксперимента. Кроме того, ограниченность маршрута не позволяет исследовать механизмы, лежащие в основе пространственной навигации.
Известны также многолучевые лабиринты (Olton, D.S.; Samuelson, R.J. (1976). "Remembrance of places passed: Spatial memory in rats". Journal of Experimental Psychology: Animal Behavior Processes. 2 (2): 97-116) или лабиринт Барнса (Barnes, CA (1979). "Memory deficits associated with senescence: a neurophysiological and behavioral study in the rat." J Comp Physiol Psychol. 1979 Feb;93(l):74-104), где животное должно выбрать один из множества рукавов с подкреплением или одно из множества отверстий для избегания раздражающего фактора. То есть особенностью многолучевых лабиринтов является использование множества альтернативных выборов, что делает их более привлекательными по сравнению с Τ или Υ лабиринтами.
Недостатком всех лучевых лабиринтов является невозможность отделить и исключить совпадение случайного выбора с правильным, что влияет на чистоту проводимого эксперимента.
Известен также лабиринт Хебба-Уильямса, который обеспечивает разные маршруты между фиксированными точками старта и финиша для животных (Hebb, D. О. and К. A. Williams. 1946. A method of rating animal intelligence. J. Gen. Psychol. 34:59-65; Pritchett-Corning, Kathleen & Mulder, Guy. (2004). Hebb-Williams mazes. Contemporary topics in laboratory animal science / American Association for Laboratory Animal Science. 43. 44-5.). Лабиринт в первую очередь ориентирован на эгоцентрическую навигацию и запоминание пространственного расположения точек старта и финиша, хотя встречаются модификации этого лабиринта с использованием внешних сигналов.
Недостатком является то, что варианты проходов в этом лабиринте не являются идентичными с точки зрения сложности.
Известен способ оценки пространственной ориентировки и когнитивных нарушений у экспериментальных животных (RU 2551308 C2 от 2012.10.15, класс МПК А61В 5/16, G09B 23/28), где ориентировочно-исследовательское и двигательное поведение крыс исследуют на фоне выработки пищедобывательного навыка посредством дифференциации траектории движения животных в Ж-образном лабиринте. Оценку осуществляют по следующим формам двигательных действий: движения к локусам лабиринта без пищевого подкрепления; целенаправленные движения к локусу с пищевым подкреплением; исследовательские обходы всех площадок лабиринта; движения к локусу, зеркально противоположному локусу с пищевым подкреплением; многократно повторяющиеся движения между двумя локусами лабиринта; замирание на стартовой площадке. Способ позволяет повысить достоверность исследования, что достигается за счет многофакторной оценки функций центральной нервной системы.
Недостатком данного способа является то, что он ориентирован на свободное поисковое поведение крыс, запоминание маршрута и его воспроизведение в неизменных условиях одной и той же модификации лабиринта.
Известно также, что стандартом тестирования пространственной памяти является водный лабиринт Морриса, в котором животное обучается находить скрытую под водой платформу (Morris RGM. Spatial localization does not require the presence of local cues. Learn Motiv 1981;12:239-260). В указанном лабиринте исследуется траектория движения животного, его время нахождения в секторах лабиринта и время достижения платформы. При обучении, варьируют позицию старта животного, где ориентация осуществляется на основании внешних по отношению к бассейну сигналов. Предполагается, что животные используют последовательно или, чаще одновременно, различные стратегии достижения цели, которые включают в себя помимо пространственной ориентации, но также не пространственные (Whishaw IQ, Mittleman G. Visits to starts, routes, and places by rats (Rattus norvegicus) in swimming pool navigation tasks. J Comp Psychol. 1986 Dec;100(4):422-31. PMID: 3802786.). Данный лабиринт позволяет исследовать механизмы памяти и обучения, задействуя как аллоцентрическую так и эгоцентрическую навигацию.
Еще одним похожим водным лабиринтом, является лабиринт Цинциннатти, который представляет из себя множественный Т-лабиринт (Vorhees CV, Williams МТ. Cincinnati water maze: A review of the development, methods, and evidence as a test of egocentric learning and memory. Neurotoxicol Teratol. 2016;57:1-19. doi:10.1016/j.ntt.2016.08.002). В заявленном лабиринте животное осуществляет выбор правого или левого рукава, один из которых ведет в тупик, а другой в место следующего выбора. Лабиринт представляет собой девять соединенных между собой Т-образных перекрестков. Животные вынуждены находить путь от одного конца лабиринта к другому, перемещаясь через отверстия в стенах, а не в конце каждого прохода. Стены достаточно широкие, чтобы животные не могли опереться о стену, при этом сами стены сделаны из оргстекла, чтобы не допустить нежелательного поведения животных, например перелезания через стену или поиск швов в стенах, за которые можно ухватиться. Особенностью данного лабиринта является возможность использовать его как с внешними сигналами, так и без них, что позволяет исследовать оба типа навигации. Недостатком этого лабиринта является его неизменная конфигурация. Указанный лабиринт взят за прототип.
Недостатком вышеприведенных водных лабиринтов является трудоемкость их использования, из-за размеров, так как подобные лабиринты занимают целое помещение, и, кроме того, требуют специальное оборудование по доставке и сливу воды, а также ее подогреву. Кроме того, реализованный в лабиринтах метод ориентирован на реакцию избегания, где животное ищет платформу, стремясь избежать дискомфорта, связанного с пребыванием в воде. Стресс, сопровождающий подобные условия может оказывать влияние на когнитивные функции, что сказывается на результатах эксперимента.
Дополнительно отмечаем, что любой используемый лабиринт позволяет оценить когнитивные способности животных на основании траектории его прохождения, времени достижения цели, количества ошибок.
Задачей заявляемого технического решения является получение оценки когнитивных способностей подопытных животных, при выполнении ими задачи поиска подкрепления, при котором осуществляется цепочка равнозначных альтернативных выборов в различных конфигурациях лабиринта, как используя внешние сигналы, так и без них, за счет использования лабиринта с модульной конструкцией.
Отличием от прототипа является возможность многократной модификации маршрута, а также того, что поиск подкрепления животными при этом осуществляется на сухопутной арене, что позволяет избежать ими стресса, связанного с задачами, выполняемыми в воде.
Раскрытие сущности технического решения
Технический результат вышеприведенной задачи достигается за счет разработки устройства для тестирования поведения животных, включающее в себя лабиринт, выполненный в виде арены, и состоящий из внешних стен и внутренних перегородок, где сам лабиринт представляет собой арену, с квадратными отсеками, формируемыми с помощью фиксируемых съемных перегородок, при этом по меньше мере на одной перегородке находиться проход, а один из отсеков имеет кормушку. Указанное техническое решение обеспечивает модульную конструкцию, которая позволяет изменить конфигурацию лабиринта, меняя положение сменных перегородок.
Возможен вариант технического решения, где фиксация перегородок осуществляется с помощью колонн с пазами, расположенными во внутреннем пространстве лабиринта и полуколонн с пазами, расположенными на внешних стенах лабиринта. Указанное техническое решение позволяет создавать различные конфигурации лабиринта, меняя положение отдельных перегородок, не используя, при этом пол лабиринта, который остается однородным, что позволяет быстро убирать его и ликвидировать любые следы животных, которые могли бы служить сигналами.
Возможен вариант технического решения, где фиксация перегородок осуществляется с помощью перфорированного пола и штифтов по нижнему краю перегородок. Указанное техническое решение позволяет создавать различные конфигурации лабиринта без установки дополнительных элементов во внутреннем пространстве лабиринта.
Возможен вариант технического решения, где внутренние перегородки зафиксированы не во всех возможных позициях и формируемые ими отсеки не квадратные. Указанное техническое решение позволяет расширить количество возможных многократных модификаций маршрутов.
Возможен вариант технического решения, где проход в перегородке реализован в виде арки или в виде отверстия. Указанное техническое решение позволяет сформировать маршруты для животного от отсека, выбранного в качестве стартового к отсеку, выбранному в качестве финишного с проходами, оптимальными для лабораторных животных.
Возможен вариант технического решения, где перегородки имеют разный цвет для каждой стороны, или имеют одинаковый цвет для каждой стороны, или цвет всех перегородок одинаковый, или цвет хотя бы одной перегородки отличается хотя бы с одной стороны, или перегородки имеют одинаковый цвет, а напольное покрытие отдельных отсеков имеет разный цвет, или перегородки и напольное покрытие имеют одинаковый цвет. Указанное техническое решение позволяет использовать цвет в качестве внешних сигналов для животного, где выбор маркированных определенным цветом проходов обеспечит оптимальный маршрут к получению подкрепления.
Возможен вариант технического решения, где арена выполнена в виде квадратной или прямоугольной формы. Указанное техническое решение увеличивает варианты модификаций лабиринта.
Возможен вариант технического решения, где кормушка установлена на съемной перегородке или внутренней стороне внешней стены или установлена на полу или в углублении пола. Указанное техническое решение обеспечивает вариативность маршрутов для животного за счет смены отсека в котором животное получает подкрепление.
Возможен вариант технического решения, где у арены отсутствует потолок, или присутствует прозрачный потолок или у арены присутствует непрозрачный потолок. Указанное техническое решение увеличивает варианты модификаций лабиринта при которых животное изолировано в разной степени от окружающей обстановки.
Возможен вариант технического решения, где лабиринт обеспечен видеокамерой. Указанное техническое решение позволяет осуществлять видеофиксацию поведения животного в лабиринте для дальнейшего анализа.
Возможен вариант технического решения, где лабиринт оснащен хотя бы одним датчиком движения. Указанное техническое решение позволяет автоматически определять координаты животного в лабиринте в условиях полной изоляции животного от внешней среды, в случае использования лабиринта с непрозрачными стенами и потолком.
Технический результат вышеприведенной задачи достигается за счет способа использования заявленного устройства, включающий в себя лабиринт, выполненный в виде арены, и состоящий из внешних стен и внутренних перегородок и отличающийся тем, что с целью обеспечения многократных модификаций маршрутов, лабиринт выполнен модульным, за счет изменения конфигурации перегородок с проходами, а также изменения нахождения стартового и финишного отсеков, за время менее 5 минут, так что каждая последующая побежка животного может быть реализована в новых условиях. Указанное техническое решение позволяет при тестировании предъявлять животному последовательно разные задачи, представленные разными маршрутами (цепочками альтернативных выборов), как равнозначными по длине и уровню сложности, так и не равнозначными.
Технический результат вышеприведенной задачи достигается за счет способа использования заявленного устройства, включающий в себя лабиринт, выполненный в виде арены, и состоящий из внешних стен и внутренних перегородок и отличающийся тем, что с целью обеспечения многократных модификаций ориентации маршрутов относительно окружающей обстановки, лабиринт выполнен мобильным, за счет размеров и веса, которые позволяют его поворачивать, переносить и монтировать за время, менее 30 минут. Указанное техническое решение позволяет проводить тестирование животных варьируя расположение маршрутов относительно внешнего пространства, что приводит к минимизации влияния внешних признаков и снижает вероятность использования внешних, по отношению к лабиринту, ориентиров для навигации.
Краткий перечень чертежей
Дополнительно отмечаем, что приложенные на фиг. 1-5 показывают наиболее предпочтительный вариант выполнения технического решения и не могут рассматриваться в качестве ограничения содержания технического решения, которое включает и другие варианты осуществления.
Пример реализации технического решения, а именно лабиринта для исследования поведения крыс отражен на
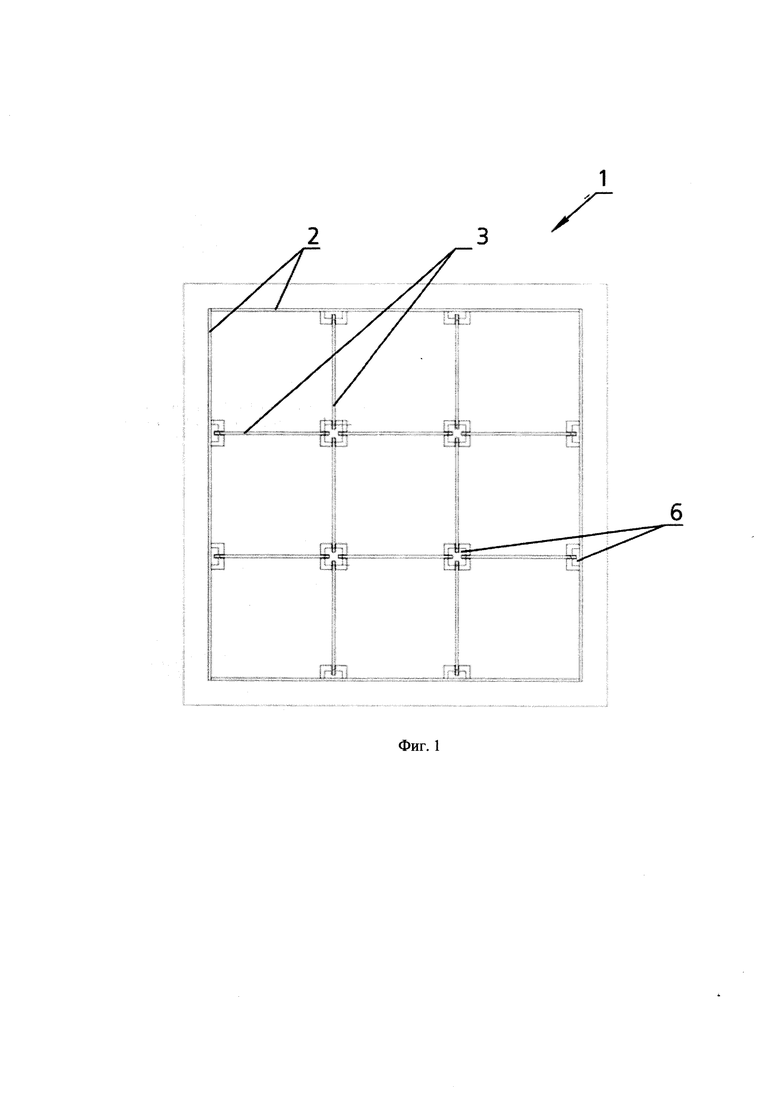
фиг. 1 - чертеж лабиринта, вид сверху;
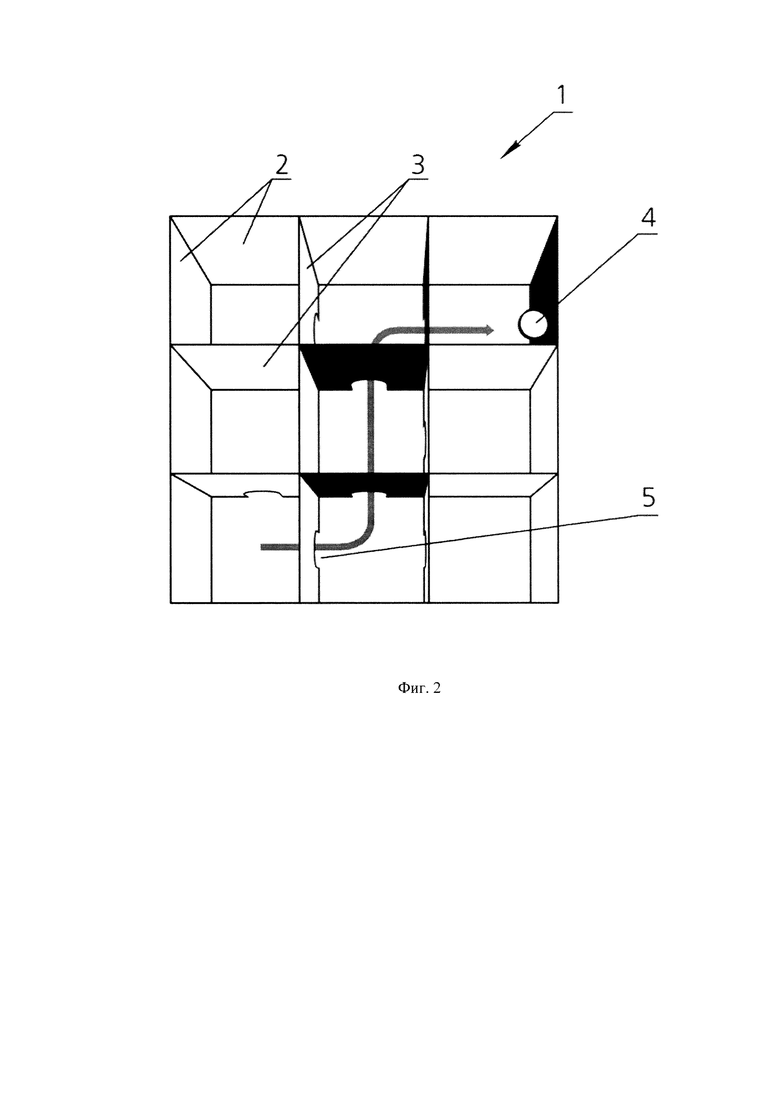
фиг. 2 - наглядный пример, вид лабиринта сверху;
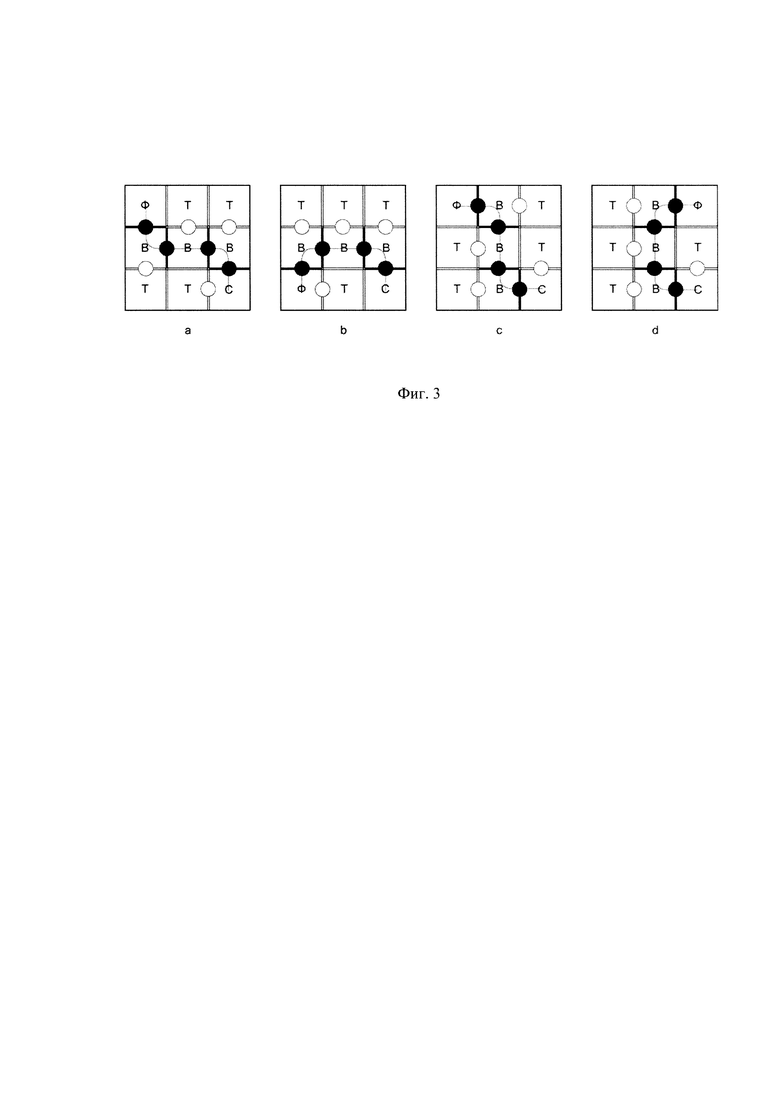
фиг. 3 - варианты разных маршрутов лабиринта;
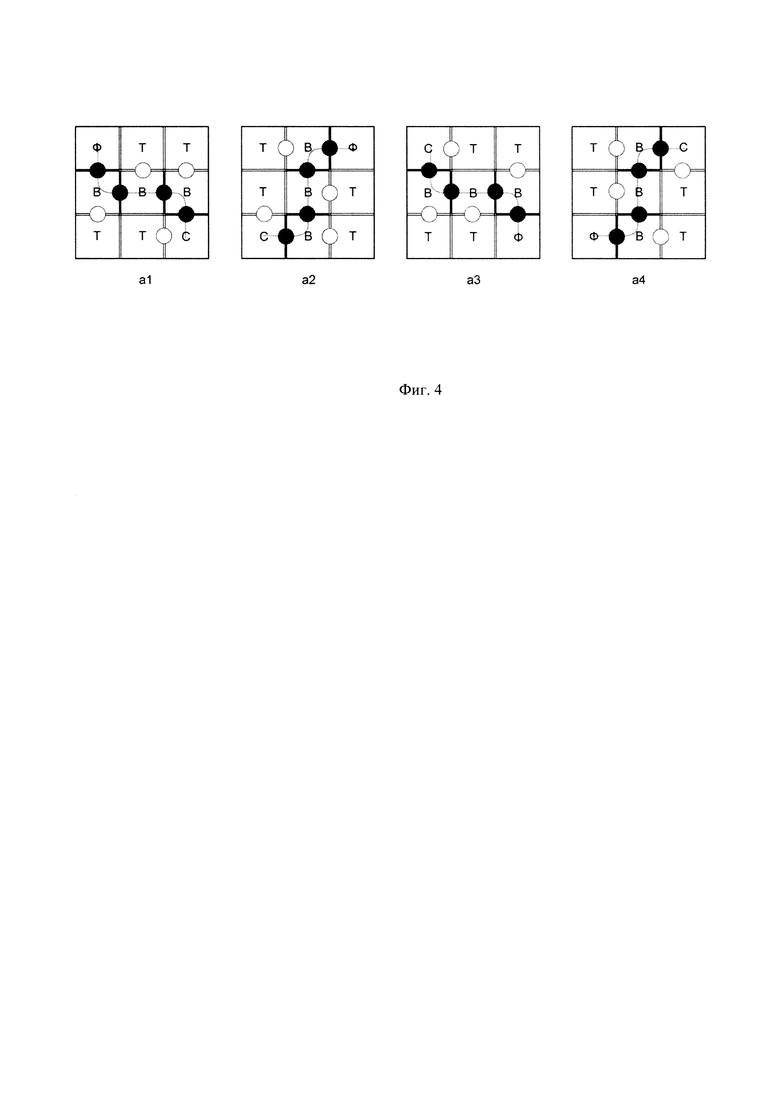
фиг. 4 - варианты разного положения в пространстве одного маршрута;
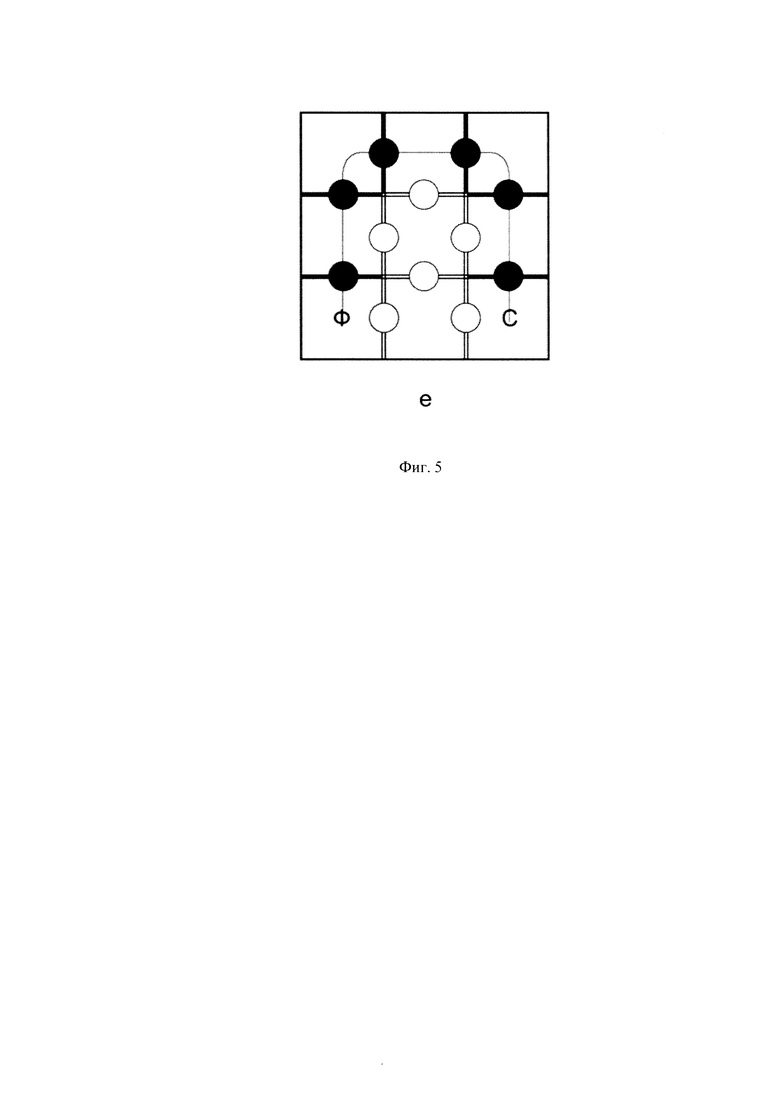
фиг. 5 - тестовой вариант лабиринта
поз. 1 - лабиринт, выполненный в виде арены со сменными внутренними перегородками 3;
поз. 2 - боковые (внешние) стены лабиринта 1, высотой не менее 20 см;
поз. 3 - внутренние сменные перегородки, образующие отсеки, стороной не менее 15x15 см лабиринта 1, при этом сменные перегородки 3 представлены в трех вариантах: белые сплошные перегородки 3, белые перегородки 3 с аркой 5 для прохода животного, перегородки с одной стороны белые, а с другой стороны черные с аркой 5 для прохода животного;
поз. 4 - кормушка, которая размещается в отсеке, назначенном в данной конфигурации финишным. В зависимости от задачи, кормушка располагается на высоте от 5 см и выше от пола на черной или белой перегородке (высокое расположение кормушки необходимо для того, чтобы исключить возможность ее визуального обнаружения из соседнего отсека). И, в зависимости от отсека, назначенного финишным, стенка с кормушкой либо вставляется в пазы колонн, либо прикрепляется к наружной стене двусторонним скотчем.
поз. 5 - проход, выполненный в виде арки или отверстия, находящийся на внутренних сменных перегородках 3, лабиринта 1.
поз. 6 - колонна с пазами или полуколонн с пазами, расположенными на внешних стенах лабиринта, обеспечивающая закрепление перегородок 3 между отдельными отсеками лабиринта 1.
Осуществление технического решения
В заявляемом техническом решение применяются следующие термины и определения:
Проходы - это арки или отверстия 5 в сменных стенках лабиринта 1. Животные - в первую очередь лабораторные грызуны: крысы или мыши, но также могут быть использованы любые лабораторные животные в лабиринте 1 соответствующего размера, в зависимости от целей использования, например, хомяки или морские свинки.
Отсек - отдельное помещение, выполненное в виде квадратного отсека внутри лабиринта 1.
Заявляемое техническое решение реализовано на фиг. 1-5, где само устройство, выполненное в виде лабиринта 1, представляет из себя арену, разделенную на квадратные отсеки, за счет внутренних сменных перегородок 3.
Общий вес и размеры лабиринта 1 позволяют легко разворачивать его на любой угол относительно первоначального положения, перемещать его в пространстве и использовать в любом помещении.
При этом арена лабиринта 1 может быть выполнена квадратной или прямоугольной.
Квадратная форма лабиринта 1 - это арена, которая посредством перегородок разделяется на равное число квадратных отсеков пола по обоим осям координатной сетки и описывается как (n x n) в общем случае где η может быть любым. Вариант лабиринта (3 x 3) представлен на фиг. 1-5.
Прямоугольная форма лабиринта 1 - это арена, которая посредством перегородок разделяется на различное число квадратных отсеков пола по обоим осям координатной сетки и описывается как (n x m) в общем случае, где n и m могут быть любыми.
Лабиринт 1 изготовлен из белого непрозрачного пластика или оргстекла. Выбор материала обусловлен оптимальными свойствами пластика для уборки лабиринта, непрозрачность обеспечивает изоляцию животного от посторонних визуальных сигналов.
Внутренние перегородки 3, разделяющие квадратные отсеки, сменные. Фиксация сменных перегородок 3 осуществляется с помощью пазов (на фиг. не показаны) расположенных на полуколоннах, установленных на внутренней поверхности боковых стен 2 лабиринта 1 и на колоннах 6, расположенных во внутреннем пространстве лабиринта, в углах центрального отсека.
Одна из перегородок 3 снабжена кормушкой, расположенной на высоте 10 см от пола. В зависимости от задачи, перегородка 3 с прикрепленной кормушкой размещается или в один из пазов (на фиг. не показан), разделяющий отсеки или, в случае размещения кормушки на боковой стенке 2, она фиксируется на двусторонний скотч. В лабиринте 1 можно использовать как пищевое, так и питьевое подкрепление.
Стартовым отсеком в данном лабиринте 1 может быть любой отсек, назначенный исследователем, финишным отсеком, является отсек с кормушкой, расположение которого также можно варьировать. После достижения финиша и получения подкрепления животное извлекается из лабиринта 1.
Лабиринт 1 позволяет производить обучение пищедобывательному поведению в соответствии с сигналами. В качестве сигналов используется цвет сменных перегородок 3. Задачей в лабиринте 1 является выбор прохода через белые или через черные перегородки 3. Так, если подкрепляется выбор проходов через черные перегородки 3, то проходы 5 через белые перегородки ведут в тупики, то есть отсеки с единственным входом, а проходы 5 через черные перегородки ведут в следующий отсек, где перед животным опять стоит выбор между черным или белым проходом. На фиг. 2 серой стрелкой показан маршрут от старта до финиша через проходы, расположенные на черных перегородках.
Использование проходов 5 в виде арок позволяет животному осуществлять проход из одного отсека в другой не преодолевая порога, что дает возможность исследовать поведение животного в условиях единого пространства пола.
Использование проходов 5 в виде отверстий позволяет животному осуществлять проход из одного отсека в другой преодолевая порог, что дает возможность исследовать поведение животного в условиях, ограничивающих отдельные отсеки со всех сторон, включая пол.
На фиг. 3 представлены 4 основных варианта комбинаций проходов для лабиринта 3x3, при которых каждый квадратный отсек лабиринта 1 является или тупиком, при выборе белого прохода или проходом в следующий отсек, при выборе черного прохода. Буквами Τ обозначены тупиковые отсеки, буквами В - отсеки с возможностью выбора прохода, С - стартовый отсек, который также является отсеком выбора и Φ - финишный отсек с кормушкой. Серая линия на схемах описывает маршрут.
Все 4 варианта являются равнозначными по сложности для животного, так как во всех случаях использовано равное число внутренних перегородок - (12) которое делится на равное число белых и черных перегородок 3 с проходами и сплошных перегородок (каждой по 4). При этом 4 конфигурации лабиринта обеспечивают равное число тупиковых отсеков (4) и отсеков выбора (4).
На фиг. 3 представлены возможные маршруты из одного стартового отсека. В случае использования лабиринта без потолка затруднительно создать идентичные условия внешнего по отношению к лабиринту пространства и в этом случае животное может использовать внешние ориентиры для навигации.
На фиг. 4 показан пример, где с целью минимизации влияния внешних признаков, один из возможных маршрутов - маршрут (a1), повернут на 90 (а2), 180 (а3) или 270 (а4) градусов, что обеспечивает разнообразие комбинаций позиций старта, финиша и траекторий прохода к кормушке относительно внешней обстановки.
Возможны варианты поворота самого лабиринта на любой угол.
Варианты, представленные на фиг. 2-5 включают в себя цвет стен в качестве внешних сигналов. Возможно нанесение цветовых меток на напольное покрытие, используя их в качестве внешних сигналов. При этом можно использовать набор сменных напольных покрытий с заранее нанесенными метками.
Возможен вариант монтажа внутренних перегородок с помощью штифтов, устанавливаемых в перфорированный пол.
Различные комбинации внутренних перегородок 3 формируют различные варианты доступных для животного проходов, в зависимости от задач, поставленных исследователем, то есть модульная организация лабиринта позволяет быстро, как правило за несколько минут, в процессе эксперимента изменить конфигурацию лабиринта, так что каждая последующая побежка животного может быть реализована в новых условиях.
Лабиринт позволяет создавать как разные, так и одинаковые по длине и сложности конфигурации маршрутов. Формируемые внутренними перегородками отсеки могут быть как одинаковыми, так и разными по форме и размеру.
Для удобства анализа исследуемого поведения, лабиринт 1 снабжен видеокамерой, расположенной сверху. Программное распознавание животного обеспечивает данные о его местоположении в каждый момент эксперимента. Результатом анализа поведения в лабиринте 1 является траектория движения животного и время достижения кормушки. Заходы в тупиковые отсеки, рассматриваются, как ошибки. Обученным животным считается животное, безошибочно выбирающее проходы 5, ведущие к кормушке, не заходя в тупики.
Возможно использование лабиринта с потолком, изолирующим животное сверху. В случае непрозрачного потолка, животное лишается возможности ориентироваться по внешним, относительно всего лабиринта сигналам. В этом случае для получения информации о координате животного в каждый момент времени, возможно использование датчиков движения, установленных внутри лабиринта.
Измеряемыми и сравнительными параметрами поведения являются: успешность выполнения задания, время, которое животное затратило на маршрут от старта до финиша, количество посещенных отсеков разного типа, число возвратов, время, проведенное в каждом отсеке, длина пройденного пути, число опытных испытаний, необходимых для достижения критерия обученности.
Для исследования используемой стратегии навигации у уже обученного животного можно также использовать вариант теста, при котором в лабиринте 1 нет сплошных перегородок 3 и ближайшие маршруты к кормушке достигаются прохождением через проходы в белых перегородках 3, а черные перегородки 3 обеспечивают максимально длинный путь (фиг.5). Животное, игнорирующее проверку возможности достичь кормушки кратчайшим путем, а ориентированное только на черные проходы может рассматриваться как использующее стратегию выбора пути исключительно по сигналам.
Процедура обучения.
За 24 часа до начала обучения животное подвергается пищевой или питьевой (в зависимости от типа используемого подкрепления) депривации. В первый опытный день животное помещается в один закрытый со всех сторон сплошными стенками отсек лабиринта 1 с размещенной там кормушкой (или поилкой). После опустошения кормушки животное вынимается и сажается в отдельную клетку. После наполнения кормушки животное снова сажают в этот отсек. Эту процедуру проводят до уверенного обучения животных получать подкрепление в кормушке. В среднем достаточно от 5 до 10 испытаний. На второй опытный день животное помещается в стартовый отсек одного из вариантов лабиринта 1, например (а). При размещении, в старте, животное стараются ориентировать носом в угол или, если в качестве старта выбран не угловой отсек, то носом к стенке, чтобы не было выраженной ориентации к тому или другому проходу. Для этого используется белая перегородка 3, прикрывающая проходы от животного и устанавливаемая по диагонали в стартовый отсек, после размещения животного, перегородка извлекается. Предварительно в финишном отсеке размещается подкрепление. После обнаружения подкрепления, животное извлекается и сажается в отдельную клетку. Производится поворот лабиринта на 90 градусов и животное опять сажается в лабиринт 1. Таким образом проводят 5 испытаний, каждый раз поворачивая лабиринт 1 на 90 градусов, заканчивая исходным положением (а, а90, а180, а270, а). Положение углов квадратной арены при этом сохраняется в одних и тех же координатах. Такая вариативность размещения одного и того же маршрута в одном месте проводится с целью минимизации влияния внешних признаков на навигацию. Между испытаниями необходимо очищать пол, а также следует протирать арки, сквозь которые проходят животные и по возможности их варьировать с целью минимизации возможности использовать животным в качестве ориентиров оставленные следы. Следует отметить, что также можно получить те же варианты размещения маршрута в пространстве, не поворачивая лабиринт, а меняя внутренние перегородки и положение старта и финиша. Это занимает больше времени, однако в этом случае можно быть уверенным, что при прохождении маршрута животное не использовало метки, оставленные на полу, так как один и тот же маршрут фактически проходит по разным клеткам пола.
В следующей экспериментальной серии того же дня животному предлагают уже другой вариант лабиринта 1, например, лабиринт b, и также проводят 5 испытаний, каждый раз с поворотом на 90 градусов (b, b90, b80, b270, b). В третий, четвертый и пятый экспериментальные дни также проводят две серии по 5 испытаний, при этом в каждом испытании предлагается новый маршрут лабиринта 1, опять заканчивая первым маршрутом (а, b, с, d, а). Когда животное безошибочно выполняет побежки во всех вариантах лабиринта 1, то проводится проверочное тестирование в лабиринте 1 (е).
Если животное игнорирует проходы в белых перегородках и следует длинным маршрутом через проходы в черных перегородках, то можно предположить, что в данной задаче оно ориентируется в соответствии с внешними сигналами. Если животное повторяет один из маршрутов, которые использовались при обучении, игнорируя цвет перегородок, то это может свидетельствовать об использовании животным другой стратегии.
Лабиринт может быть использован при исследовании как аллоцентрической навигации при обучении животных с использованием сигналов, таких как цветовая маркировка проходов или пола, так и для исследования эгоцентрической навигации, при обучении животных прохождению маршрута в условиях без внешних сигналов.
Заявленное техническое решение обеспечивает возможность создания идентичных по длине и равнозначных по уровню сложности маршрутов в лабиринте (где сложность определяется по числу поворотов, числу тупиковых отсеков и отсеков где животное совершает выбор), за счет модульной системы, в основе которой лежат сменные внутренние перегородки с проходами или без них, а также с цветовой индикацией или без нее.
Подобное устройство предназначено для тестирования лабораторных животных с целью оценки их когнитивных способностей и используемых стратегий навигации при обучении и реализации целенаправленного пищедобывательного поведения на основании скорости обучения в лабиринте, анализа пройденной траектории, времени принятия решения в каждой точке выбора, общего времени достижения цели и количества ошибок.
| название | год | авторы | номер документа |
|---|---|---|---|
| Соединения, обладающие антиишемическими, антиангинальными, цитопротективными свойствами, способ их получения и их применение, способ лечения нейродегенеративного заболевания, способ лечения психического расстройства | 2019 |
|
RU2741910C2 |
| СПОСОБ ОЦЕНКИ ПРОСТРАНСТВЕННОЙ ОРИЕНТИРОВКИ И КОГНИТИВНЫХ НАРУШЕНИЙ У ЭКСПЕРИМЕНТАЛЬНЫХ ЖИВОТНЫХ | 2012 |
|
RU2551308C2 |
| Способ оценки когнитивных функций и нарушения памяти у лабораторных животных | 2022 |
|
RU2808376C1 |
| ГЕПТАПЕПТИД С АДАПТОГЕННОЙ И АНКСИОЛИТИЧЕСКОЙ АКТИВНОСТЬЮ | 1999 |
|
RU2161500C1 |
| АНКСИОЛИТИЧЕСКОЕ СРЕДСТВО И ФАРМАЦЕВТИЧЕСКАЯ КОМПОЗИЦИЯ АНКСИОЛИТИЧЕСКОГО ДЕЙСТВИЯ | 1999 |
|
RU2155065C1 |
| ЛЕКАРСТВЕННОЕ СРЕДСТВО, ОБЛАДАЮЩЕЕ НООТРОПНОЙ АКТИВНОСТЬЮ | 2007 |
|
RU2331432C1 |
| СПОСОБ ДИАГНОСТИКИ СИНДРОМА ДЕФИЦИТА ВНИМАНИЯ В ЭКСПЕРИМЕНТЕ НА ЖИВОТНЫХ | 2003 |
|
RU2269295C2 |
| СПОСОБ АКТИВАЦИИ КОГНИТИВНЫХ ФУНКЦИЙ У ЛАБОРАТОРНЫХ ЖИВОТНЫХ | 2014 |
|
RU2578446C1 |
| ПЕПТИД, ОБЛАДАЮЩИЙ НЕЙРОТРОПНЫМИ СВОЙСТВАМИ | 2011 |
|
RU2443712C1 |
| ПЕПТИД, ОБЛАДАЮЩИЙ НЕЙРОТРОПНЫМИ СВОЙСТВАМИ | 2011 |
|
RU2443711C1 |
Группа изобретений относится к экспериментальной физиологии и используется при исследовании нейрофизиологических механизмов обучения и памяти, пространственной навигации, двигательной и поисковой активности лабораторных животных. Устройство для тестирования поведения животных включает в себя лабиринт, выполненный в виде арены, и состоящий из внешних стен и внутренних перегородок. При этом сам лабиринт представляет собой арену с квадратными отсеками, формируемыми с помощью используемых в качестве источников сигналов фиксируемых белых и черных съемных перегородок, и напольным покрытием с нанесенными на нем и используемыми в качестве внешних сигналов цветовыми метками. По меньшей мере, на одной перегородке находится проход для животного, а финишный отсек содержит кормушку. Также представлены варианты способа использования указанного устройства. Достигается получение оценки когнитивных способностей подопытных животных при выполнении ими задачи поиска подкрепления, при котором осуществляется цепочка равнозначных альтернативных выборов в различных конфигурациях лабиринта. 3 н. и 9 з.п. ф-лы, 5 ил.
1. Устройство для тестирования поведения животных, включающее в себя лабиринт, выполненный в виде арены, и состоящий из внешних стен и внутренних перегородок, отличающееся тем, что сам лабиринт представляет собой арену с квадратными отсеками, формируемыми с помощью используемых в качестве источников сигналов фиксируемых белых и черных съемных перегородок, и напольным покрытием с нанесенными на нем и используемыми в качестве внешних сигналов цветовыми метками, при этом, по меньшей мере, на одной перегородке находится проход для животного, а финишный отсек содержит кормушку.
2. Устройство для тестирования поведения животных по п. 1, отличающееся тем, что фиксация перегородок осуществляется с помощью колонн с пазами, расположенными во внутреннем пространстве лабиринта, и полуколонн с пазами, расположенными на внешних стенах лабиринта.
3. Устройство для тестирования поведения животных по п. 1, отличающееся тем, что фиксация перегородок осуществляется с помощью перфорированного пола и штифтов по нижнему краю перегородок.
4. Устройство для тестирования поведения животных по п. 1, отличающееся тем, что проход в перегородке реализован в виде арки или в виде отверстия.
5. Устройство для тестирования поведения животных по п. 1, отличающееся тем, что перегородки имеют разный цвет для каждой стороны, или имеют одинаковый цвет для каждой стороны, или цвет всех перегородок одинаковый, или цвет хотя бы одной перегородки отличается хотя бы с одной стороны, или перегородки имеют одинаковый цвет, а напольное покрытие отдельных отсеков имеет разный цвет, или перегородки и напольное покрытие имеют одинаковый цвет.
6. Устройство для тестирования поведения животных по п. 1, отличающееся тем, что арена выполнена в виде квадратной или прямоугольной формы.
7. Устройство для тестирования поведения животных по п. 1, отличающееся тем, что кормушка установлена на съемной перегородке или внутренней стороне внешней стены или установлена на полу или в углублении пола.
8. Устройство для тестирования поведения животных по п. 1, отличающееся тем, что у арены отсутствует потолок, или присутствует прозрачный потолок, или у арены присутствует непрозрачный потолок.
9. Устройство для тестирования поведения животных по п. 1, отличающееся тем, что лабиринт обеспечен видеокамерой.
10. Устройство для тестирования поведения животных по п. 1, отличающееся тем, что лабиринт оснащен хотя бы одним датчиком движения.
11. Способ использования устройства по пп. 1-10, включающий размещение подкрепления в финишном отсеке модульного лабиринта, проведение испытаний при помещении животного в стартовый отсек, извлечении животного после обнаружения им подкрепления, повороте лабиринта на 90 градусов с последующим помещением в нем животного при каждом испытании и приведении его в исходное положение при завершении испытаний.
12. Способ использования устройства по пп. 1-10, включающий проведение испытаний с поворотом модульного лабиринта на 90 градусов при каждом из них с изменением при этом маршрута испытуемого животного, приведением лабиринта к первому маршруту при завершении испытаний и проведением проверочного тестирования при безошибочном выполнении животным перемещений во всех вариантах лабиринта.
| RU 204879 U1, 16.06.2021 | |||
| Способ определения продолжительности латентного периода условнорефлекторной реакции мелких лабораторных животных и устройство для его осуществления | 2019 |
|
RU2712054C1 |
| СТЕНД ЛАБОРАТОРНЫЙ АКТОГРАФИЧЕСКИЙ ДЛЯ ХРОНОБИОЛОГИЧЕСКИХ И ХРОНОФАРМАКОЛОГИЧЕСКИХ ИССЛЕДОВАНИЙ НА ЖИВОТНЫХ | 2018 |
|
RU2689692C1 |
| СПОСОБ ПОЛУЧЕНИЯ О-ТРИАЛКИЛ(АЛКОКСИ) СИЛИЛАЛЛИЛМЕТИЛФОСФОНАТОВ | 0 |
|
SU199874A1 |
| Преобразователь угла поворота вала в код | 1960 |
|
SU143683A1 |
| Устройство для исследования целенаправленной деятельности мелких лабораторных животных | 2015 |
|
RU2613787C1 |
| CN 209218868 U, 09.08.2019 | |||
| CN 208446348 U, 01.02.2019. | |||

