Изобретение относится к способу оценки ошибок и целостности при определении местоположения, а также к устройству управления и компьютерному программному продукту для осуществления способа.
Абсолютное географическое положение транспортного средства в настоящее время может быть определено с помощью приемников для глобальных навигационных спутниковых систем (ГНСС), в дальнейшем также называемое измерением ГНСС. Дополнительно относительное перемещение транспортного средства может быть определено, например, с помощью инерционных (ИИБ) и одометрических (ОДО) датчиков, установленных в транспортном средстве.
Во-первых, ГНСС-система позволяет определить положение приемника с помощью измерений времени прохождения, известных также как код определения дальности (Code Ranging). Во-вторых, она позволяет измерять скорости приемника с помощью доплеровских смещений.
В рамках объединения датчиков ГНСС, ИИБ и ОДО можно объединить результаты измерений, чтобы определение местоположения было более точным и с более высоким уровнем доступности. Объединение датчиков обычно реализуется с помощью фильтров Калмана или фильтров частиц.
Для обнаружения ошибок при измерениях ГНСС существуют хорошо известные методы автономного контроля целостности приемника (АКЦП) (Receiver Autonomous Integrity Monitoring (RAIM)) и обнаружения и исключения неисправностей (ОИН) (Fault Detection and Exclusion (FDE)). При этом используется тот факт, что во время измерения ГНСС обычно доступно больше, чем необходимые четыре спутниковых сигнала. Для обнаружения и исключения неисправностей должно быть доступно не менее шести спутников. Кроме того, существуют также методы «код минус несущая» (Code-Minus-Carrier) и двойного дельта-коррелятора для обнаружения многолучевого распространения ГНСС.
В общем случае при измерениях ГНСС в транспортном средстве возникают спорадические ошибки, которые современный уровень техники обнаружить не позволяет. Это ограничивает доверительный уровень, и тем самым целостность определения местоположения с помощью ГНСС.
При определении местоположения, которое ниже следует понимать как в смысле локализации, так и в смысле определения скорости или ускорения, происходят медленно или быстро меняющиеся ошибки. К причинам быстро меняющихся ошибок измерения в первую очередь относятся так называемые пути распространения радиосигнала вне зоны прямой видимости (Non-Line-of-Sight (NLOS) - вне ЗПВ), в частности, когда приемники движутся, а также ошибки спутников ГНСС, такие как случайные аппаратные и программные ошибки, например, чрезвычайно быстрое смещение часов.
Так называемые сигналы вне ЗПВ возникают в результате отражения и рассеяния радиосигнала в непосредственной близости от приемника, например, в зданиях. При этом различаются различные возможности наложения нежелательного сигнала вне ЗПВ и нужного сигнала в зоне прямой видимости (ЗПВ). Большая часть таких возможностей наложения описывается термином «многолучевое распространение».
В объединенных методах фильтрации ошибки в соответственно используемых датчиках могут привести к неправильному определению местоположения.<0} {0>Hier sind neben den NLOS-Signalen des GNSS, Drift und Offset in der Inertialsensorik, und Offsets in der Odometrie als mögliche Fehlerursachen zu nennen.<}0{>Помимо сигналов ГНСС вне ЗПВ, возможными причинами ошибок являются отклонение и смещение в инерциальных датчиках и смещения в одометрических датчиках.<0} {0>Insbesondere Kalman-Filterlösungen zeigen die unerwünschte zeitliche Fehlerfortpflanzung.<}0{>В частности, конструктивные решения с фильтрами Калмана демонстрируют нежелательное распространение ошибок по времени.
Названные выше детекторы ошибок ГНСС - АКЦП и ОИН - принципиально ограничены тем, что сигналы ГНСС анализируются изолированно, что препятствует обнаружению однородных ошибок (отказ общего характера). Кроме того, АКЦП и ОИН демонстрируют слабые места при обнаружении, если одновременно возникают помехи у нескольких спутников.
Таким образом, в основу изобретения положена задача, достичь улучшенной оценки ошибок и целостности при определении местоположения. При этом предпочтительно необходимо также обеспечить обнаружение быстро меняющихся ошибок измерения ГНСС, в частности, вызванных многолучевым распространением и/или ошибками в измерениях инерциальных или одометрических датчиков, и тем самым повысить целостность определения местоположения транспортного средства.
Задача решается с помощью признаков независимых пунктов формулы изобретения. Предпочтительные усовершенствования являются предметом зависимых пунктов формулы изобретения. С этого места прямо указывается, что пункты формулы изобретения становятся предметом описания.
Согласно одному аспекту изобретения способ оценки ошибок и целостности при определении местоположения включает регистрацию значений местоположения и вычисление погрешностей часов приемника с помощью дискретных во времени измерений времени прохождения с помощью спутниковой навигационной системы. Предпочтительно значения местоположения для каждого из отдельных измерений включают указание положения в трехмерной системе координат, которое определяется путем измерения времени прохождения сигнала ГНСС и его умножения на скорость света. Историю значений местоположения желательно сохранять, чтобы она была доступна для последующих этапов способа.
Под измерением времени прохождения, часто также называемым кодом определения дальности (Code Ranging) или псевдодальностью, следует понимать, что измеряется разница во времени от испускания сигнала ГНСС из фазового центра спутниковой антенны до приема сигнала в фазовом центре приемной антенны. Умножение на скорость света дает расстояние между ними, однако полученное значение очень неточно из-за отсутствия синхронизации часов спутника и приемника. Сигнал ГНСС наряду с несущим сигналом и эфемеридными данными спутника включает в себя код, который также содержится в приемнике и который, так сказать, сдвигает приемник таким образом, чтобы он синхронизировался с кодом, принятым со спутника. Этот сдвиг соответствует измеренному времени прохождения.
Псевдодальность обычно означает расстояние, которое получается в результате измерения между спутником и приемником, если при этом учтены значимые факторы неточностей. Из-за большого значения скорости света даже небольшие погрешности часов при измерении времени прохождения приводят к большим отклонениям, что справедливо также и для значений местоположения, зарегистрированных с помощью дискретных во времени измерений времени прохождения. Математически псевдодальность PR для момента i времени может быть описана как PR_i=r_i+e_RecClock_i+e_other_i+e_MP_i, где r_i - фактическое расстояние между спутником и приемником, e_RecClock_i - погрешность часов приемника, e_other_i - дополнительные ошибки, например, ионосферные, помеховые и спутниковые погрешности часов, e_MP_i - быстро меняющиеся ошибки, например, ошибки многолучевого распространения или ошибки из-за нахождения вне ЗПВ, все - в момент времени i. Ошибка e_RecClock математически вычисляется или оценивается в приемнике после каждого измерения псевдодальности. Ошибки могут принимать как положительные, так и отрицательные значения.
Следующий этап способа согласно изобретению включает регистрацию первой псевдодальности в более поздний, предпочтительно текущий момент времени посредством дискретного во времени измерения времени прохождения с помощью спутниковой навигационной системы. Погрешность часов может быть определена, например, известным способом, при наличии четырех спутников ГНСС. Погрешности часов должны быть преобразованы в расстояние, которое получается в результате умножения разницы во времени, соответствующей погрешности часов, на скорость света. С первой псевдодальностью предоставляется опорная величина, полученная путем измерения.
Для обеспечения возможности сравнения предоставляется прогнозная величина - вторая псевдодальность. Для этого значение местоположения приемника, которое соотносится с более поздним моментом времени, экстраполируется на основе траектории, то есть траектория логически продолжается на один временной такт. Траектория воспроизводит предыдущий путь перемещения приемника последовательно или для дискретных моментов времени. Вместе с тем погрешность часов для более позднего момента времени экстраполируется на основании предыдущей истории погрешности часов. Это делается на основе количества погрешностей часов, рассчитанных перед более поздним моментом времени, причем количество может устанавливаться переменным или разовым.
Способ также включает в себя определение расстояния между экстраполированным значением местоположения приемника и положением спутника спутниковой навигационной системы в более поздний момент времени. Как уже было объяснено ранее, основу для экстраполированного значения местоположения составляют значения местоположения, зарегистрированные с помощью дискретных во времени измерений времени прохождения. Экстраполированное значение местоположения, то есть оценочное значение местоположения, соотнесенное с более поздним моментом времени, образует, таким образом, один конец фактического расстояния, другой конец которого формируется спутником, положение которого известно, например, из передаваемых эфемеридных данных. В случае спутника речь идет о произвольно выбранном спутнике из спутников, доступных в смысле прямой передачи сигнала.
Чтобы получить опорную величину для первой псевдодальности на основании расстояния между экстраполированным значением местоположения приемника и положением спутника, экстраполированную погрешность часов, то есть оценочна погрешность часов, соотнесенное с более поздним моментом времени, прибавляют к расстоянию, которое было определено. При этом целесообразно, как уже было объяснено ранее, выразить экстраполированную погрешность часов в виде расстояния. Полученную таким образом вторую псевдодальность затем сравнивают с первой псевдодальностью.
Другими словами, в способе согласно изобретению формируется оценочное значение или соответственно прогноз местоположения приемника и погрешности часов приемника, и вычисляется соответствующая псевдодальность. Эта прогнозная псевдодальность сравнивается с измеренной псевдодальностью, чтобы получить более высокий уровень качества для ошибок и целостности измерения времени прохождения конкретного спутника простым, незатратным и эффективным способом, и в частности для распознавания быстро меняющихся ошибок. Предпочтительно способ повторяется для других спутников спутниковой навигационной системе.
В отличие от обычного метода ОИН, оценка ошибок и целостности в способе согласно изобретению может быть выполнена до решения системы уравнений положения, в которой местоположение приемника вычисляется с помощью данных с нескольких спутников, что означает уменьшение ресурсоемкости расчетов.
В отличие от метода «код минус несущая» оценка ошибки и целостности не зависит от типа ошибки пути распространения вне ЗПВ, например, многолучевого распространения, которое возникает одно, или многолучевого распространения, которое возникает в дополнение к прямому пути прохождения сигнала.
При этом в случае приемника речь преимущественно идет транспортном средстве, или соответственно приемник расположен или стационарно установлен в транспортном средстве.
Предпочтительно, чтобы траектория формировалась, исходя из количества значений местоположения, зарегистрированных перед более поздним моментом времени посредством дискретных во времени измерений времени прохождения с помощью спутниковой навигационной системы и/или извлекалась из данных датчиков регистрации окружающей среды, в частности видеокамер, радаров и/ или лидаров. Использование датчиков регистрации окружающей среды возможно, поскольку, начиная с известного абсолютного местоположения, они могут актуализировать его, регистрируя перемещение.
Предпочтительно, более поздний момент времени соответствует настоящему моменту времени. Напротив, регистрация значений местоположения и вычисление погрешностей часов приемника выполняются в более ранний момент времени, то есть в прошлом по отношению к более позднему моменту времени. Моменты времени предпочтительно распределены равномерно, т.е. дискретные во времени измерения времени прохождения и, соответственно, более поздний момент времени в каждом случае по времени одинаково отдален от предыдущего момента времени. Следовательно, более поздний момент времени предпочтительно является следующим шагом после количества моментов времени измерений, следующим за определенным тактом. Предпочтительно, такт соответствует частоте дискретизации приемника.
В соответствии с предпочтительным вариантом реализации разность значений местоположения выводится из разностей значений местоположения ранее зарегистрированных значений местоположения, чтобы экстраполировать значение местоположения приемника в более поздний момент времени. Поэтому рассматриваются изменения от одного значения местоположения к другому, чтобы на основании этого оценить значение местоположения в более поздний момент времени.
В соответствии с предпочтительным вариантом реализации экстраполяция значения местоположения приемника дополнительно базируется на моделировании инерции, измерениях инерциальных датчиков (ИИБ), измерениях одометрических датчиков и/ или доплеровских измерениях системы спутниковой навигации. Инерционные датчики обычно включают в себя датчики, которые измеряют ускорения и частоты вращения, в то время как одометрические датчики позволяют определять собственное местоположение путем регистрации данных силовой системы, например, числа оборотов колес и/ или движений руля.
Экстраполяция погрешности часов приемника в соответствии с предпочтительным вариантом реализации дополнительно базируется на измерениях температуры, сохраненной информации о смещении часов и /или о кварцевом резонаторе, так что погрешность часов можно определить еще более точно.
Предпочтительно, чтобы экстраполяция погрешности часов приемника происходила, как уже было объяснялось ранее, в виде значения расстояния, которое эквивалентно погрешности часов.
В соответствии с предпочтительным вариантом осуществления способа при определении расстояния (r‘0) между экстраполированным значением (P‘0) местоположения приемника и положением спутника (S0) положение спутника определяется по эфемеридным данным этого спутника, которые передаются вместе со спутниковым сигналом.
Предпочтительно, чтобы сравнение второй псевдодальности с первой псевдодальностью включало формирование разности. Величина разницы может быть сохранена или соответственно отправлена как переменная или, предпочтительно, использована непосредственно в качестве отправной точки для дальнейших мер, используемых в качестве реакции на текущую определенную ошибочность или соответственно целостность измерения времени прохождения сигнала спутника. Например, в случае большой величины разницы может иметь смысл сначала исключить спутник из определения местоположения приемника.
Предпочтительно, чтобы относительно опорного значения с небольшой величиной разницы соотносился высокий уровень качества, а с большой величиной разницы - низкий уровень качества, и чтобы был установлен соответствующий уровень качества. Это обеспечит унифицированный уровень качества.
В соответствии с предпочтительным вариантом реализации осуществляется контроль на предмет косвенно принятых сигналов, например, из-за многолучевого распространения, причем быстрое изменение уровня качества относительно опорного значения оценивается как признак приема непрямых сигналов.
В соответствии с еще одним аспектом изобретения выполнено устройство управления для осуществления описанного способа.
Устройство управления содержит память и процессор, причем способ в виде компьютерной программы сохранен в памяти, а процессор выполнен для оосуществления способа после загрузки компьютерной программы из памяти в процессор.
Компьютерная программа устройства управления предпочтительно включает в себя средство программного кода для осуществления всех этапов способа в ходе выполнения компьютерной программы на компьютере или на одном из названных выше устройств.
В соответствии с еще одним аспектом изобретения компьютерный программный продукт содержит программный код, который хранится на компьютерочитаемом носителе информации и который, когда он считывается на устройстве обработки данных, осуществляет один из указанных способов.
Описанные выше свойства, особенности и преимущества этого изобретения, а также способ, которым они достигаются, станут более ясными и понятными в приведенном ниже описании возможного варианта реализации, дополненном чертежом.
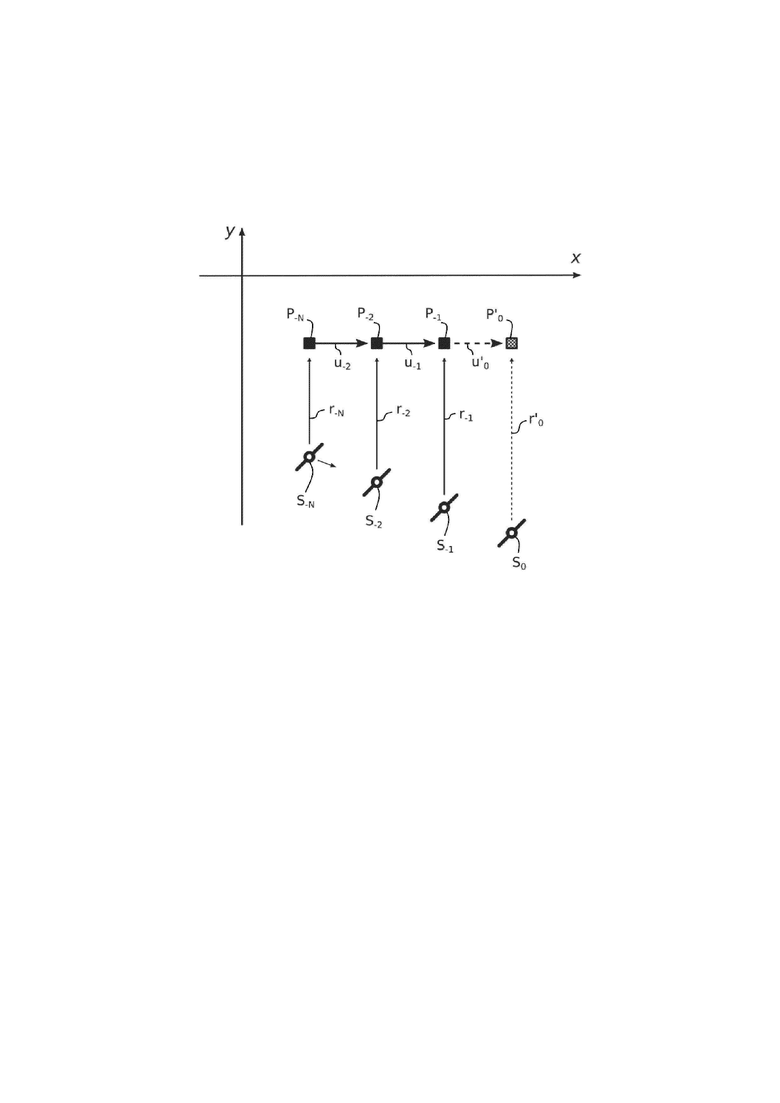
На фиг. схематически показано двумерное, растянутое по пространственным осям X и Y, примерное представление перемещения приемника и спутника, а также их расстояний в определенные моменты времени, причем приемник находится в транспортном средстве, перемещение которого приравнивается к перемещению приемника. Каждая ссылочная позиция содержит индекс времени i, причем i обозначает момент отсчета. -N, -2 и -1 обозначают соответствующие моменты времени в прошлом, когда проводились измерения. В противоположность этому более поздний момент времени соответствует настоящему и обозначается i=0. Показанный спутник репрезентирует собой любой спутник и занимает позиции S-N, S-2, S-1, S0 в разные моменты времени i.
Значения местоположения соответствуют положению приемника, где P описывается как P-N, P-2, P-1. Их получают с помощью дискретных во времени измерений времени прохождения с использованием спутниковой навигационной системы, например, NAVSTAR GPS, Галилео, ГЛОНАСС или Бэйдоу. Векторы u-1, u-2 и до u-(N-1), описывают изменения местоположения, каждый из которых представляет собой разницу между двумя значениями местоположения. В примере осуществления от изменения положения к изменению положения изменяются также расстояния r-N, r-2, r-1 между приемником и спутником. Для более позднего момента времени i=0 определяются также значение P0 местоположения и расстояние r0 до спутника, которое используется для определения первой псевдодальности как измеренного расстояния путем прибавления измеренной текущей погрешности Δt0 часов.
На основании предыдущих изменений посредством логического продолжения предполагается оценочное значение u‘0 для изменения местоположения следующего - то есть текущего или соответственно настоящего - момента времени отсчета. Таким образом, с помощью истории перемещений получается прогноз, обозначаемый в общем случае здесь апострофом, текущего значения P‘0 местоположения приемника. При этом в качестве дополнительной информации используются моделирование инерции транспортного средства, результаты измерений инерциальных датчиков, результаты измерений одометрических датчиков и результаты доплеровских измерений системы спутниковой навигации.
Также выполняется прогноз погрешности часов приемника, то есть разницы по времени, с которой часы приемника отклоняются от спутниковых часов. С этой целью история последних измеренных погрешностей часов используется для экстраполяции соответствующей разницы Δt‘0 по времени, которая, однако, для упрощения дальнейших вычислений выражается как эквивалент расстояния. Дополнительно в экстраполяцию включается сохраненная информация о смещении часов или о кварцевом резонаторе, а также результаты измерений температуры.
Кроме того, фактическое расстояние r‘0 между спутником и приемником рассчитывается на основе этой оценочной информации, причем термин фактическое расстояние понимается в том смысле, что это расстояние не содержит каких-либо часовых, ионосферных или других погрешностей, типичных для спутниковых измерений, так как это расстояние рассчитывается как расстояние между двумя точками. Путем прибавления опять же предполагаемой погрешности Δt‘0 часов обеспечивается вторая псевдодальность. Дополнительно к погрешности Δt‘0 часов для формирования предполагаемой, то есть второй псевдодальности могут быть добавлены дополнительные величины погрешностей, чтобы соответствовать первой псевдодальности, которая также может содержать дополнительные величины погрешностей, например, ионосферные погрешности. Величина разницы между первой и второй псевдодальностями при условии, что добавляется только погрешность Δt‘0 часов, т.е. |(r‘0+Δt‘0) - (r0+Δt0)|, содержит информацию о любых возможных быстро меняющихся ошибках, например, вызванных многолучевым распространением спутникового сигнала, поскольку измеренное расстояние скачкообразно отклоняется от полученного путем экстраполяции или оценки. В общем случае величина разницы, наоборот, отражает целостность измерения, причем это работает тем лучше, чем больше количество временных тактов.
Таким образом, величина разницы представляет собой уровень качества для ошибок и целостности измерения времени прохождения конкретного спутника. При многократном повторении способа, т.е. с помощью большого количества используемых временных тактов или соответственно измерений для оценки, может быть достигнут более высокий уровень достоверности, однако в общем случае целесообразно находить компромисс в отношении необходимой вычислительной мощности.
Способ или соответственно соответствующее устройство управления могут использоваться в любой системе, например, в автомобилях, дронах, самолетах или кораблях.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ВЫСОКОТОЧНОГО ОТНОСИТЕЛЬНОГО МЕСТОПОЛОЖЕНИЯ ДВИЖУЩЕГОСЯ ОБЪЕКТА ПО СИГНАЛАМ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1998 |
|
RU2143123C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ПАРАМЕТРОВ НАВИГАЦИОННЫХ СПУТНИКОВ | 2015 |
|
RU2584541C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЦЕЛОСТНОСТИ ВЫСОКОТОЧНЫХ НАВИГАЦИОННЫХ ОПРЕДЕЛЕНИЙ ПОТРЕБИТЕЛЯ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2577846C1 |
| Способ определения местоположения абонентских терминалов, перемещающихся в зоне покрытия локальной системы навигации | 2023 |
|
RU2825248C1 |
| Способ определения целостности высокоточных навигационных определений в реальном времени | 2017 |
|
RU2644450C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА ПРИ ИСПОЛЬЗОВАНИИ ГЛОБАЛЬНЫХ НАВИГАЦИОННЫХ СПУТНИКОВЫХ СИСТЕМ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2492499C1 |
| Способ и система верификации данных измерений | 2015 |
|
RU2692093C2 |
| СПОСОБ ИДЕНТИФИКАЦИИ ПАРАМЕТРОВ НАВИГАЦИОННЫХ СПУТНИКОВ | 2015 |
|
RU2587666C1 |
| ОПРЕДЕЛЕНИЕ КУРСА ДЛЯ ГИБРИДНОГО НАВИГАЦИОННОГО РЕШЕНИЯ НА ОСНОВЕ МАГНИТНО-ОТКАЛИБРОВАННЫХ ИЗМЕРЕНИЙ | 2015 |
|
RU2673504C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАКСИМАЛЬНО ПРИМЕНИМОЙ ЧАСТОТЫ ДЛЯ ИОНОСФЕРНОЙ РАДИОСВЯЗИ | 2012 |
|
RU2516239C2 |
Изобретение относится к оценке ошибок и целостности при определении местоположения. Техническим результатом является повышение целостности и улучшение оценки ошибок при определении местоположения. Упомянутый технический результат достигается тем, что регистрируют значения (P-N, P-2, P-1) местоположения и рассчитывают погрешности часов приемника посредством дискретных во времени измерений времени прохождения с помощью спутниковой навигационной системы (СНС), регистрируют первую псевдодальность перед более поздним моментом времени посредством дискретного во времени измерения времени прохождения с помощью СНС, экстраполируют значения (P'0) местоположения приемника в более поздний момент времени на основании траектории, которая воспроизводит предыдущий путь перемещения приемника, и экстраполируют погрешность часов приемника в более поздний момент времени на основании количества погрешностей часов, рассчитанных перед более поздним моментом времени, определяют расстояние (r'0) между экстраполированным значением (P'0) местоположения приемника и положением спутника (S0) СНС в более поздний момент времени, причем уровень качества для возможности использования определения местоположения с помощью спутника достигается путем формирования второй псевдодальности на основании суммы установленного расстояния (r'0) и экстраполированной погрешности часов в более поздний момент времени и сравнения второй псевдодальности с первой псевдодальностью. 3 н. и 9 з.п. ф-лы, 1 ил.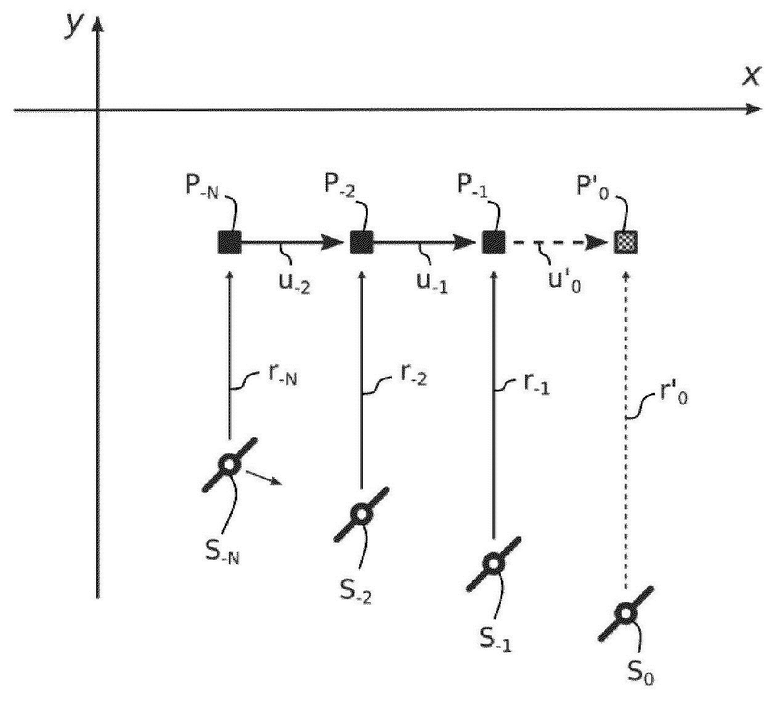
1. Способ оценки ошибок и целостности при определении местоположения, включающий:
- регистрацию значений (P-N, P-2, P-1) местоположения и расчет погрешностей часов приемника посредством дискретных во времени измерений времени прохождения с помощью спутниковой навигационной системы,
- регистрацию первой псевдодальности в более поздний момент времени посредством дискретного во времени измерения времени прохождения с помощью спутниковой навигационной системы,
- экстраполяцию значения (P'0) местоположения приемника в более поздний момент времени на основании траектории, которая воспроизводит предыдущий путь перемещения приемника, и экстраполяцию погрешности часов приемника в более поздний момент времени на основании количества погрешностей часов, рассчитанных перед более поздним моментом времени,
- определение расстояния (r'0) между экстраполированным значением (P'0) местоположения приемника и положением спутника (S0) спутниковой навигационной системы в более поздний момент времени,
причем уровень качества для возможности использования определения местоположения с помощью спутника получается за счет
- формирования второй псевдодальности на основании суммы установленного расстояния (r'0) и экстраполированной погрешности часов в более поздний момент времени и
- сравнения второй псевдодальности с первой псевдодальностью.
2. Способ по п. 1, отличающийся тем, что траекторию формируют посредством количества значений (P-N, P-2, P-1) местоположения, зарегистрированных перед более поздним моментом времени, и/или извлекают из данных датчиков регистрации окружающей среды, в частности видеокамер, радаров и/или лидаров.
3. Способ по любому из предыдущих пунктов, отличающийся тем, что более поздний момент времени соответствует текущему моменту времени, а регистрацию значений (P-N, P-2, P-1) местоположения и расчет погрешностей часов приемника, наоборот, осуществляют в прошедшие, в частности равномерно разнесенные, моменты времени.
4. Способ по любому из предыдущих пунктов, отличающийся тем, что для экстраполяции значения (P'0) местоположения приемника для более позднего момента времени из разностей (u-1, u-2) значений местоположения ранее зарегистрированных значений (P-N, P-2, P-1) местоположения выводят разность (u'0) значений местоположения.
5. Способ по любому из предыдущих пунктов, отличающийся тем, что экстраполяция значения (P'0) местоположения приемника дополнительно основана на моделировании инерции, измерениях инерциальных датчиков, измерениях одометрических датчиков и/или доплеровских измерениях системы спутниковой навигации.
6. Способ по любому из предыдущих пунктов, отличающийся тем, что экстраполяция погрешности часов приемника дополнительно базируется на измерениях температуры, сохраненной информации о смещении часов и/или о кварцевом резонаторе.
7. Способ по любому из предыдущих пунктов, отличающийся тем, что экстраполяцию погрешности часов приемника осуществляют в виде значения расстояния, которое эквивалентно погрешности часов.
8. Способ по любому из предыдущих пунктов, отличающийся тем, что при определении расстояния (r'0) между экстраполированным значением (P'0) положения приемника и положением спутника (S0) положение (S0) спутника определяют по его эфемеридным данным, передаваемым с помощью спутникового сигнала.
9. Способ по любому из предыдущих пунктов, отличающийся тем, что сравнение второй псевдодальности с первой псевдодальностью включает формирование разности.
10. Способ по п. 9, отличающийся тем, что контроль осуществляют на предмет косвенно принятых сигналов, причем быстрое изменение уровня качества относительно опорного значения оценивают как указание на прием непрямых сигналов.
11. Устройство управления, содержащее память и процессор, причем компьютерочитаемые инструкции компьютерной программы сохранены в памяти и процессор выполнен с возможностью считывания и выполнения упомянутых инструкций для осуществления способа по любому из предшествующих пунктов.
12. Компьютерочитаемый носитель информации, содержащий программный код, который, выполняемый на устройстве обработки данных, осуществляет способ по любому из пп. 1-10.
| US 2011235686 A1, 29.09.2011 | |||
| CN 108919312 A, 30.11.2018 | |||
| DE 102013016243 A1, 17.07.2014 | |||
| US 2008117100 A1, 22.05.2008 | |||
| JP 5989813 B2, 07.09.2016 | |||
| УСТРОЙСТВО И СПОСОБ КОНТРОЛЯ ЦЕЛОСТНОСТИ В РЕАЛЬНОМ ВРЕМЕНИ СПУТНИКОВОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2009 |
|
RU2501039C2 |
| US 5714948 A, 03.02.1998. | |||

