Изобретение относится к области управления вентильным электродвигателем и может быть использовано в любых промышленных электромеханических системах.
Известно техническое решение по патенту РФ 1681371 [1] [Мищенко В.А., Мишенко Н.И. Способ векторного управления синхронным двигателем с постоянными магнитами на роторе, МПК Н02Р 21/12 30.09.1991]. Сущность данного изобретения заключается в регулируемой ориентации вектора тока статора относительно продольной оси ротора, что позволило повысить энергетические и динамические показатели электродвигателя при повышении точности регулирования момента и скорости.
Главным недостатком данного способа является невысокая надежность электропривода, вызванная наличием 3-х контуров регулирования фазных токов, включающих 3 регулятора тока и 3 датчика тока, а также сложность комплексной наладки.
Наиболее близким техническим решением является электропривод серии ЭПБ-2 [2]. Конструктивно электропривод ЭПБ-2 содержит регулятор скорости вращения ротора, на первый вход которого подается сигнал задания скорости, а на второй вход выходной сигнал датчика скорости вращения ротора вентильного двигателя; блок выделения модуля сигнала задания скорости вращения ротора, на вход которого подается сигнал задания скорости вращения ротора; регулятор тока, на первый вход которого подается выходной сигнал блока выделения модуля сигнала задания скорости, а на второй вход подается выходной сигнал блока определения модуля сигнала задания тока; устройство широтно-импульсной модуляции; блок управления ключами, на первый вход которого подается выходной сигнал блока определения направления, на второй вход подается выходной сигнал устройства широтно-импульсной модуляции, на третий вход подается выходной сигнал датчика положения ротора вентильного двигателя; силовой инвертор; блок питания; вентильный электрический двигатель; датчик положения ротора; датчик тока и датчик скорости вращения ротора.
Главным недостатком электропривода ЭПБ-2 является наличие блока определения направления вращения относительно сигнала задания скорости вращения и устройства определения модуля сигнала суммарного тока 3-х датчиков тока, установленных в фазах двигателя, что приводит к усложнению электрической схемы электропривода и снижению надежности.
Целью настоящего изобретения является упрощение структурной схемы управления скоростью вращения вентильного электродвигателя, снижение инерционности системы и повышение надежности.
Поставленная цель достигается тем, что система управления вентильным двигателем содержит блок ввода управляющих сигналов, регулятор скорости, блок выделения модуля, регулятор тока, блок формирования управляющих сигналов, силовой преобразователь, вентильный двигатель, датчик положения ротора, датчик скорости, датчик тока, источник питания и отличается тем, что в нее введен блок перемножения выходного сигнала регулятора скорости и выходного сигнала регулятора тока, причем выход блока ввода управляющих сигналов соединен с первым входом регулятора скорости, второй вход которого соединен с выходом датчика скорости, выход регулятора скорости соединен с входом блока выделения модуля и вторым входом блока перемножения, выход блока выделения модуля соединен с первым входом регулятора тока, второй вход которого соединен с выходом датчика тока, выход регулятора тока соединен с первым входом блока перемножения, выход блока перемножения соединен с первым входом блока формирования управляющих сигналов, второй вход которого соединен с выходом датчика положения ротора, управляющие выходы блока формирования управляющих сигналов соединены с входами силового преобразователя, выходы которого соединены с фазами вентильного двигателя.
Предлагаемое техническое решение объясняется с помощью фиг. 1-3:
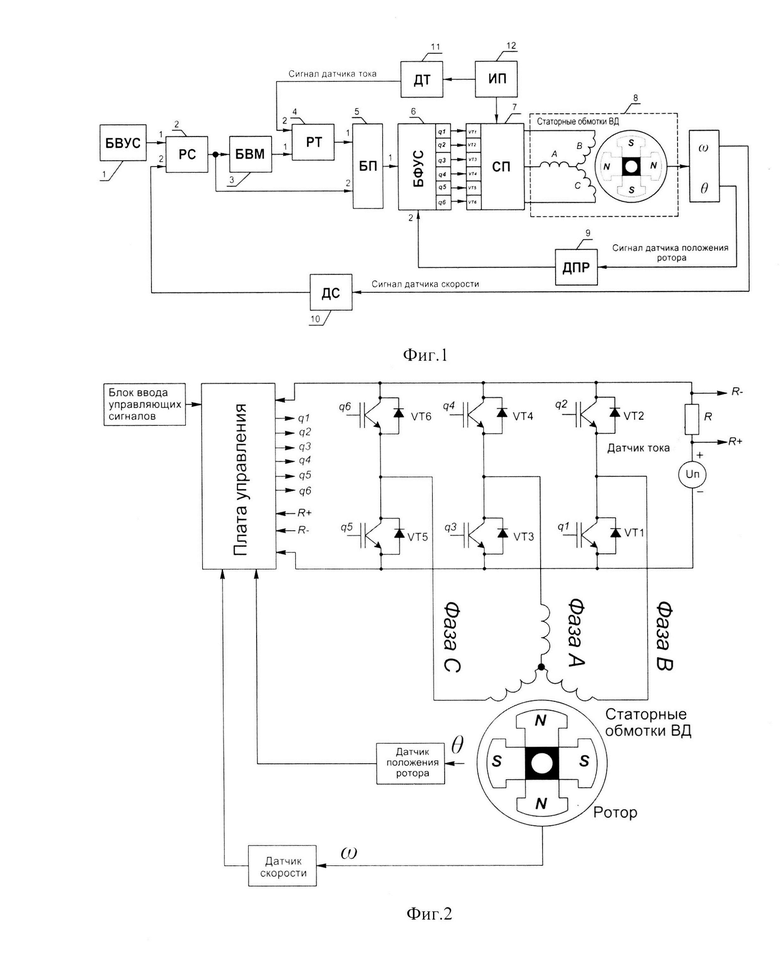
фиг. 1 - структурная схема системы управления скоростью вращения вентильного электродвигателя;
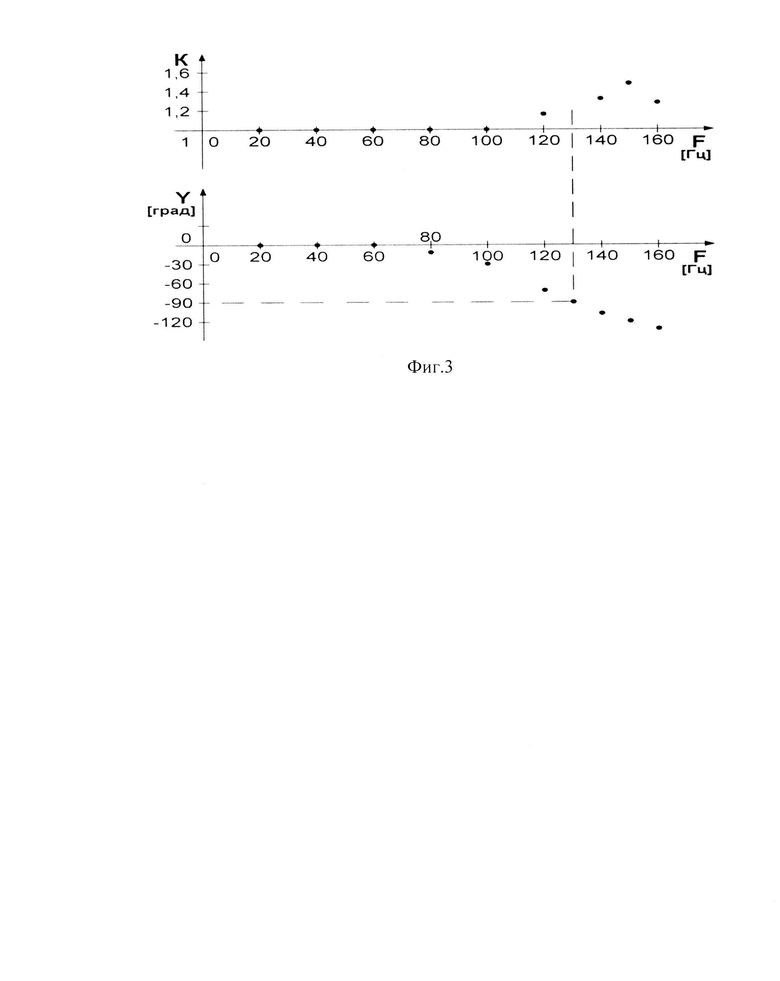
фиг. 2 - схема включения датчика тока в цепь питания силового преобразователя;
фиг. 3 - амплитудно-частотная и фаза-частотная характеристики реальной системы управления вентильным двигателем.
Структурная схема системы управления вентильным электродвигателем изображена на фиг. 1. Система управления вентильным двигателем содержит блок ввода управляющих сигналов 1, регулятор скорости 2, блок выделения модуля 3, регулятор тока 4, блок перемножения 5, блок формирования управляющих сигналов 6, силовой преобразователь 7, вентильный электрический двигатель 8, датчик положения ротора 9, датчик скорости 10, датчик тока 11, источник питания 12.
Согласно структурной схеме (фиг. 1) блоки системы управления скоростью вращения вентильного электродвигателя соединены следующим образом. Выход блока ввода управляющих сигналов 1 и выход датчика скорости 10 соединены с первым и вторым входами регулятора скорости 2 соответственно. Выход регулятора скорости вращения 2 соединен с входом блока выделения модуля 3 сигнала задания скорости вращения электродвигателя 8 и вторым входом блока перемножения 5. Выход блока выделения модуля 3 сигнала задания скорости вращения электродвигателя 8 и выход датчика тока 11 соединены с первым и вторым входом регулятора тока 4 соответственно, выход которого соединен с первым входом блока перемножения 5. Выход блока перемножения 5 соединен с первым входом блока формирования управляющих сигналов 6. На второй вход блока формирования управляющих сигналов 6 подается выходной сигнал датчика положения ротора 9. Выходы блока формирования управляющих сигналов 6 q1-q6 подключаются к управляющим входам силового преобразователя 7 VT1-VT6, питание которого осуществляется от источника питания 12 со встроенным датчиком тока 11. Выходные сигналы с блока перемножения 5 и датчика положения ротора 9 определяют номера и длительность включения активных элементов силового преобразователя 7. Выходы блока силового преобразователя 7 подключены к входам А, В, С вентильного электродвигателя 8.
Система управления скоростью вращения вентильным электродвигателем работает следующим образом. С помощью блока ввода управляющих сигналов 1 задается необходимое значение скорости вращения ротора вентильного электродвигателя 8 (скорость вращения пропорциональна амплитуде входного сигнала). Заданное значение скорости вращения сравнивается с выходным сигналом датчика скорости 10 для выделения рассогласования (сигнал ошибки) в блоке регулятора скорости 2. После чего рассогласование по скорости преобразуется регулятором скорости 2 в сигнал задания скорости вращения вентильного электродвигателя 8. Далее сигнал задания скорости вращения вентильного электродвигателя 8 подается на схему блока перемножения 5 и блок выделения модуля 3 сигнала задания скорости вращения вентильного электродвигателя 8 для устранения отрицательного знака (в случае изменения направления вращения электродвигателя 8). После выделения модуля сигнал задания скорости сравнивается с выходным сигналом датчика тока 11 в блоке регулятора тока 4, после чего получившийся сигнал рассогласования по току преобразуется в сигнал задания необходимой величины тока. Далее выходной сигнал регулятора тока 4 и сигнал задания скорости регулятора скорости 2 подаются на входы блока перемножения 5, выходной сигнал которого подается на первый вход схемы формирователя управляющих сигналов 6, а на второй вход подается выходной сигнал датчика положения ротора 9. Исходя из совокупности выходных сигналов датчика положения ротора 9 и блока перемножения 5 на выходах q1-q6 блока формирования управляющих сигналов 6 генерируются прямоугольные импульсы различной длительности и порядка. Длительность выходных импульсов блока формирования управляющих сигналов 6 зависит от амплитуды выходного сигнала блока перемножения 5, а порядок - от логической комбинации датчика положения ротора 9 вентильного электродвигателя 8. Далее выходные импульсы блока формирования управляющих сигналов 6 подаются на входы VT1-VT6 силового преобразователя 7, который представляет собой стойку на базе 6-ти мощных полевых или IGBT-транзисторов. Силовой преобразователь 7 преобразует управляющие сигналы в напряжение на обмотках статора А, В, С вентильного электродвигателя 8. При этом вал двигателя начинает вращаться с угловой скоростью и знаком, установленным блоком ввода управляющих сигналов 1. Скорость вращения и перемещение вала вентильного электродвигателя 8 измеряются датчиком скорости 10 и датчиком положения ротора 9 соответственно. Измерение тока, потребляемого вентильным электродвигателем 8 в зависимости от изменения скорости вращения или момента на валу, осуществляется датчиком тока 11, установленным в схему источника питания 12.
В случае аналогового исполнения система управления вентильным двигателем может быть реализована на следующей элементной базе. Блок ввода управляющих сигналов исполнен на базе программно-логического контролера или микропроцессорного блока с ЦАП. Блок регулятора скорости, выделения модуля и регулятор тока выполняются на базе прецизионных операционных усилителей типа OP07CDR, LM324DR или др. Блок перемножения может быть исполнен на микросхеме AD633JN.
В основе работы блока формирования управляющих сигналов лежит схема широтно-импульсного модулятора и программно-запоминающего устройства. Схема широтно-импульсного модулятора может быть выполнена на операционном усилителе OP07CDR, включенного по схеме компаратора, на вход которого подается сумма выходных сигналов блока перемножения и внешнего генератора (пилообразные импульсы). Выходной сигнал широтно-импульсного модулятора подается на времязадающий вход программно-запоминающего устройства. Далее программно-запоминающее устройство (например, КР155РЕЗ) формирует управляющие сигналы для схемы силового преобразователя. Алгоритм работы программно-запоминающего устройства корректируется выходным сигналом датчика положения ротора. Датчик положения ротора обычно встроен в двигатель и выполняется на базе датчика Холла или оптического энкодера. Для упрощения схемы включения датчика тока он устанавливается на положительном полюсе источника питания схемы силового преобразователя (фиг. 2).
Схема силового преобразователя может быть выполнена на базе мощных полевых или IGBT транзисторах с защитными диодами. Датчик тока реализуется на базе шунтирующего резистора с малым значением сопротивления. Измерять падение напряжение на шунте можно, используя дифференциальный усилитель с гальванической развязкой по входу.
Существенным отличием представленной системы управления скоростью вращения вентильного электродвигателя является изменение совокупности связей структурной схемы путем введения блока перемножения выходного сигнала регулятора скорости и выходного сигнала регулятора тока. Перемножение сигнала регулятора скорости и регулятора тока позволяет определить направление вращения электродвигателя и длительность управляющих импульсов. Введение блока перемножения дает возможность исключить из структурной схемы блок определения направления вращения и устройство определения модуля сигнала суммарного тока. Данное техническое решение приводит к упрощению схемы системы управления, а также к снижению инерционности системы и повышению надежности.
Для подтверждения технического результата проведены испытания макетного образца системы управления скоростью вращения вентильного электродвигателя согласно требованиям ГОСТ 27803-91 [3].
Практические испытания показали, что диапазон регулирования скорости составил 9500, а полоса пропускания частот равна 123 Гц, коэффициент неравномерности вращения КН≤0,25. Частотные характеристики системы управления (АЧХ и ФЧХ), представлены на фиг. 3.
Экспериментальные исследования системы управления проводились на базе вентильного электродвигателя КМ-090-32-02.
СПИСОК ЛИТЕРАТУРЫ источников
1. Способ векторного управления синхронным двигателем с постоянными магнитами на роторе. Патент РФ 1681371, МПК: Н02Р 21/12.
2. Электропривод серии ЭПБ-2 техническое описание и инструкция по эксплуатации. 1992 г.
3. ГОСТ 27 803-91 Электроприводы, регулируемые для металлообрабатывающего оборудования и промышленных роботов. Технические требования.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления преобразователя электропривода с регулируемой скоростью с синхронным бесщеточным двигателем на постоянных магнитах | 2024 |
|
RU2834010C1 |
| Способ управления электроприводом постоянного тока механизма с пульсирующей нагрузккой на валу и устройство для его реализации | 1979 |
|
SU855909A1 |
| Электропривод постоянного тока | 1981 |
|
SU1022273A1 |
| ВЕНТИЛЬНО-ИНДУКТОРНЫЙ ЭЛЕКТРОПРИВОД | 2002 |
|
RU2225067C1 |
| ВЕНТИЛЬНО-ИНДУКТОРНЫЙ ЭЛЕКТРОПРИВОД С ЭКСТРЕМАЛЬНЫМ РЕЖИМОМ РАБОТЫ | 2013 |
|
RU2540319C2 |
| Частотно-регулируемый электропривод | 1989 |
|
SU1798884A1 |
| Способ управления автономнымэлЕКТРОпРиВОдОМ пОСТОяННОгО ТОКАгРузОпОд'ЕМНОгО МЕХАНизМА и уСТРОйСТВОдля ЕгО РЕАлизАции | 1979 |
|
SU843139A1 |
| Устройство для управления вентильным двигателем циклоконверторного типа (его варианты) | 1983 |
|
SU1137562A1 |
| Инвертор транспортного исполнения | 2022 |
|
RU2788306C1 |
| Частотно-регулируемый электропривод | 1986 |
|
SU1379932A2 |
Изобретение относится к области управления вентильным электродвигателем и может быть использовано в любых промышленных электромеханических системах. Система автоматического управления скоростью вращения вентильного электродвигателя содержит блок ввода управляющих сигналов (1), регулятор скорости (2), блок выделения модуля (3), регулятор тока (4), блок перемножения (5), блок формирования управляющих сигналов (6), силовой преобразователь (7), вентильный электрический двигатель (8), датчик положения ротора (9), датчик скорости (10), датчик тока (11), источник питания (12). Выход блока ввода управляющих сигналов соединен с первым входом регулятора скорости, второй вход которого соединен с выходом датчика скорости, выход регулятора скорости соединен с входом блока выделения модуля и вторым входом блока перемножения, выход блока выделения модуля соединен с первым входом регулятора тока, второй вход которого соединен с выходом датчика тока, выход регулятора тока соединен с первым входом блока перемножения, выход блока перемножения соединен с первым входом блока формирования управляющих сигналов, второй вход которого соединен с выходом датчика положения ротора, управляющие выходы блока формирования управляющих сигналов соединены с входами силового преобразователя, выходы которого соединены с фазами вентильного двигателя. Технический результат - упрощение системы управления скоростью вращения вентильного электродвигателя, снижение инерционности системы и повышение надежности. 3 ил.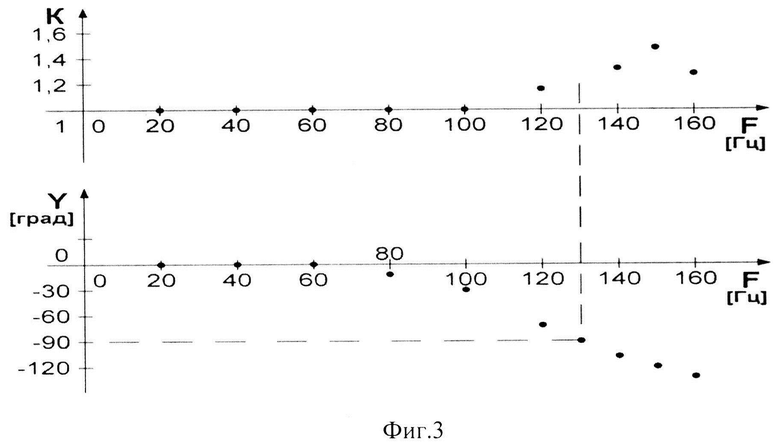
Система автоматического управления скоростью вращения вентильного электродвигателя, содержащая блок ввода управляющих сигналов, регулятор скорости, блок выделения модуля, регулятор тока, блок формирования управляющих сигналов, силовой преобразователь, вентильный двигатель, датчик положения ротора, датчик скорости, датчик тока, источник питания, отличающаяся введением в нее блока перемножения выходного сигнала регулятора скорости и выходного сигнала регулятора тока, причем выход блока ввода управляющих сигналов соединен с первым входом регулятора скорости, второй вход которого соединен с выходом датчика скорости, выход регулятора скорости соединен с входом блока выделения модуля и вторым входом блока перемножения, выход блока выделения модуля соединен с первым входом регулятора тока, второй вход которого соединен с выходом датчика тока, выход регулятора тока соединен с первым входом блока перемножения, выход блока перемножения соединен с первым входом блока формирования управляющих сигналов, второй вход которого соединен с выходом датчика положения ротора, управляющие выходы блока формирования управляющих сигналов соединены с входами силового преобразователя, выходы которого соединены с фазами вентильного двигателя.
| Способ векторного управления синхронным электродвигателем с постоянными магнитами на роторе | 1987 |
|
SU1681371A1 |
| JP 3107384 A, 07.05.1991 | |||
| СПОСОБ УПРАВЛЕНИЯ ВЕНТИЛЬНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА | 1991 |
|
RU2016474C1 |
| DE 102006046388 A1, 20.09.2007 | |||
| CN 101034865 B, 06.10.2010 | |||
| US 5880572 A1, 09.03.1999. | |||

