Система управления преобразователя электропривода с регулируемой скоростью с синхронным бесщеточным двигателем на постоянных магнитах является двухконтурной системой управления скоростью вращения синхронным бесщеточным двигателем на постоянных магнитах без контура тока. Данное изобретение может быть применено для управления широкой номенклатурой электрических приводов, в частности для управления распределенными приводами различного промышленного оборудования, такого как, например: станки ЧПУ, роботы, 3D-принтеры.
Известен способ управления синхронным бесщеточным двигателем на постоянных магнитах, сущность которого заключается в управлении ориентацией вектора тока статора относительно оси ротора. Этот способ позволяет повысить энергетические и динамические показатели двигателя вместе с увеличением показателей качества процесса регулирования по скорости и моменту [1] (SU 1681371 A1 Мищенко В.А., Мишенко Н.И. Способ векторного управления синхронным двигателем с постоянными магнитами на роторе, МПК Н02Р 21/12, 30.09.1991).
Основным недостатком способа [1] является относительно низкая надежность электропривода по причине наличия трех контуров регулирования фазных токов, состоящих из трёх регуляторов и датчиков тока. Cложность комплексной настройки системы [1] также является недостатком.
Наиболее близкое техническое решение реализовано в патенте [2] (RU 2789839 C9 Слепцов В.В., Мостовской М.В. Система управления скоростью вращения вентильного электродвигателя, МПК G05D 13/62, 19.04.2023). Система управления вентильным двигателем содержит блок ввода управляющих сигналов 1, регулятор скорости 2, блок выделения модуля 3, регулятор тока 4, блок перемножения 5, блок формирования управляющих сигналов 6, силовой преобразователь 7, вентильный электрический двигатель 8, датчик положения ротора 9, датчик скорости 10, датчик тока 11, источник питания 12.
Главным недостатком такой системы управления является наличие датчика и регулятора суммарного тока, что приводит к усложнению электрической схемы электропривода и снижению надежности.
Целью настоящего изобретения является упрощение структурной схемы управления скоростью вращения синхронного бесщеточного двигателя на постоянных магнитах за счет исключения датчика и регулятора суммарного тока при повышении надежности и сохранении технических характеристик устройства. Данное техническое решение приводит к упрощению системы управления, повышению надёжности за счёт исключения регулятора тока. Такое решение позволяет также исключить наладку регуляторов тока (доступ к ним может быть труднодоступным и требовать относительно высокой квалификации) и распределить на значительном расстоянии (относительно площади предприятия) управляющую и силовую части электропривода, исключив таким образом влияние волновых эффектов в длинных линиях.
Для достижения данной цели предложена система управления синхронным бесщеточным двигателем на постоянных магнитах, состоящая из блока формирования задающих воздействий, регулятора скорости, устройства формирования управляющих воздействий, силового преобразователя, а также датчика положения ротора и датчика скорости, размещенных на валу двигателя. Отличие предложенной системы управления от системы управления [2] заключается не только в исключении датчика тока и контура тока, но также введением в нее ограничителя сигнала преобразователя физической величины скорости, ограничителя величины сигнала регулятора скорости и суммирующего устройства.
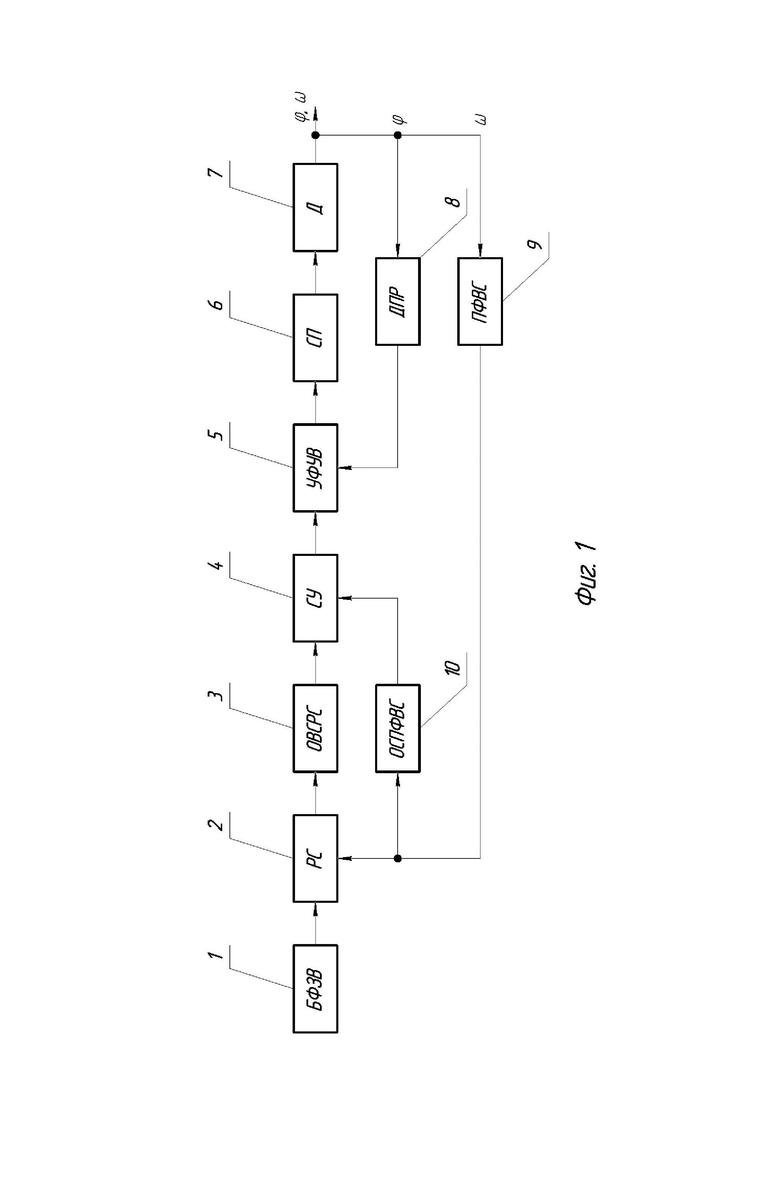
Структурная схема системы управления преобразователя электропривода с регулируемой скоростью с синхронным бесщеточным двигателем на постоянных магнитах изображена на фиг. 1. Данная система управления содержит блок формирования задающих воздействий 1, регулятор скорости 2, ограничитель величины сигнала регулятора скорости 3, суммирующее устройство 4, устройство формирования управляющих воздействий 5, силовой преобразователь 6, двигатель 7, датчик положения ротора 8, преобразователь физической величины скорости 9, ограничитель сигнала преобразователя физической величины скорости 10.
Согласно структурной схеме (фиг. 1), блоки системы управления скоростью вращения синхронного бесщеточного двигателя на постоянных магнитах соединены следующим образом. Выход блока формирования задающих воздействий 1 и выход преобразователя физической величины скорости 9 соединены с первым и вторым входами регулятора скорости 2 соответственно. Выход регулятора скорости 2 соединен с входом ограничителя величины сигнала регулятора 3, выход которого соединен с первым входом суммирующего устройства 4. Вход ограничителя сигнала преобразователя физической величины скорости 10 соединен с выходом преобразователя физической величины скорости 9, а выход ограничителя сигнала преобразователя физической величины скорости 10 соединен со вторым входом суммирующего устройства 4. Выход суммирующего устройства 4 соединен с первым входом устройства формирования управляющих воздействий 5. На второй вход устройства формирования управляющих воздействий 5 подается выходной сигнал датчика положения ротора 8. Выходы устройства формирования управляющих воздействий 5 подключаются к управляющим входам силового преобразователя 6. Выходные сигналы с устройства формирования управляющих воздействий 5 определяют последовательность и длительность включения активных элементов силового преобразователя 6, коммутирующих обмотки двигателя 7.
Система управления скоростью вращения синхронного бесщеточного двигателя на постоянных магнитах работает следующим образом. Задающее воздействие, определяющее необходимую скорость вращения ротора двигателя 7, поступает из блока формирования задающих воздействий 1. Скорость вращения ротора двигателя пропорциональна амплитуде задающего входного сигнала. В блоке регулятора скорости 2 определяется рассогласование величины уставки скорости и величины сигнала преобразователя физической величины скорости 9. Величина рассогласования (ошибки) определяет значение управляющего воздействия регулятора скорости 2, которое поступает на ограничитель величины сигнала регулятора скорости 3. Сигнал преобразователя физической величины скорости 9 подаётся на ограничитель сигнала преобразователя физической величины скорости 10. Ограниченные сигналы с блоков 3 и 10 подаются на соответствующие входы суммирующего устройства 4. Результирующий сигнал с выхода суммирующего устройства 4 подаётся на вход устройства формирования управляющих воздействий 5. Далее управляющие сигналы подаются на вход силового преобразователя 6, который осуществляет коммутацию фаз двигателя 7. В зависимости от значений сигнала датчика положения ротора 8, поступающего на вход устройства формирования управляющих воздействий 5, меняется последовательность включения фаз синхронного бесщеточного двигателя на постоянных магнитах 7.
Схемотехническая реализация системы управления преобразователя электропривода с регулируемой скоростью с синхронным бесщеточным двигателем на постоянных магнитах может быть осуществлена на следующих электронных компонентах. В случае аналогового исполнения блок формирования задающих воздействий может быть исполнен на базе потенциометра и повторителя напряжения, например, на базе прецизионного операционного усилителя OP07CDR, AD843JNZ или др. Данные электронные компоненты могут быть применены в реализации регулятора скорости, ограничителя величины сигнала регулятора скорости и ограничителя сигнала преобразователя физической величины скорости (например, диодные ограничители на базе операционного усилителя), суммирующего усилителя. Переходный процесс динамической системы электропривода сопровождается перегрузками по току. Для предотвращения перегрузки используется ограничитель величины сигнала регулятора скорости. Но в установившемся режиме ограничитель величины сигнала регулятора скорости будет препятствовать выходу электродвигателя на номинальную скорость вращения. Чтобы обеспечить выход электродвигателя на номинальную скорость вращения, реализуется положительная обратная связь с помощью суммирующего устройства, результирующим сигналом которого является сумма величин сигналов ограничителя величины сигнала регулятора скорости и ограничителя сигнала преобразователя физической величины скорости. Реализация устройства формирования управляющих воздействий представляет собой широтно-импульсный модулятор и программируемое постоянное запоминающее устройство. Схемотехнически широтно-импульсный модулятор может быть выполнен в виде компаратора на базе операционного усилителя OP07CDR. На вход компаратора подаётся сумма входных сигналов суммирующего устройства и генератора пилообразного сигнала. Выходной сигнал широтно-импульсного модулятора подается на программируемое постоянно-запоминающее устройство (например, КР155РЕ3), на которое подаётся также сигнал с датчика положения ротора. Алгоритм работы программируемого постоянного запоминающего устройства определяется выходным сигналом датчика положения ротора. Датчик положения ротора обычно встроен в электродвигатель и выполняется на базе датчика Холла или оптического энкодера. Силовой преобразователь может быть реализован в виде совокупности мостовых схем на базе МДП-транзисторов или БТИЗ с защитными диодами.
Реализация данного способа управления скоростью вращения синхронного бесщеточного двигателя на постоянных магнитах возможна как на аналоговой, так и на цифровой элементной базе. Предложенный регулятор скорости и другие блоки системы можно реализовать на микроконтроллере или программируемой логически интегральной схеме.
Для подтверждения технического результата проведены испытания макетного образца системы управления скоростью вращения синхронного бесщеточного двигателя на постоянных магнитах согласно требованиям ГОСТ 27803-91 [3].
Практические испытания показали, что диапазон регулирования скорости составил 9000, а полоса пропускания частот равна 73 Гц, коэффициент неравномерности вращения КН ≤ 0,25.
Экспериментальные исследования системы управления проводились на базе синхронного бесщеточного двигателя на постоянных магнитах КМ-090-32-02.
СПИСОК ИСТОЧНИКОВ
1. SU 1681371 A1 Мищенко В.А., Мишенко Н.И. Способ векторного управления синхронным двигателем с постоянными магнитами на роторе, МПК Н02Р 21/12 30.09.1991;
2. RU 2789839 C9 Слепцов В.В., Мостовской М.В. Система управления скоростью вращения вентильного электродвигателя, МПК G05D 13/62, 19.04.2023;
3. ГОСТ 27803-91 Электроприводы, регулируемые для металлообрабатывающего оборудования и промышленных роботов. Технические требования.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ СКОРОСТЬЮ ВРАЩЕНИЯ ВЕНТИЛЬНОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2021 |
|
RU2789839C1 |
| Вентильный электропривод | 1984 |
|
SU1280688A1 |
| ЭЛЕКТРОПРИВОД | 1991 |
|
RU2025035C1 |
| Электропривод переменного тока | 1986 |
|
SU1332506A1 |
| СПОСОБ УПРАВЛЕНИЯ СИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ ПРИ МИНИМИЗАЦИИ РЕАКТИВНОЙ МОЩНОСТИ | 2024 |
|
RU2829487C1 |
| Электропривод | 1983 |
|
SU1112520A1 |
| Электропривод с регулированием активной и реактивной энергии от сети ограниченной мощности | 1978 |
|
SU884065A2 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ТРАНСМИССИЯ САМОХОДНОЙ МАШИНЫ | 2014 |
|
RU2550408C1 |
| Способ векторного управления синхронным электродвигателем с постоянными магнитами на роторе | 1987 |
|
SU1681371A1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2015 |
|
RU2584142C1 |
Изобретение относится к системам управления синхронными бесщеточными двигателями на постоянных магнитах. Технический результат – упрощение системы управления, повышение надёжности. Блок формирования задающих воздействий вырабатывает задающее воздействие для регулятора скорости, который вместе с преобразователем физической величины скорости образует замкнутый контур управления с главной обратной связью по скорости вращения вала двигателя. Ограничитель величины сигнала регулятора скорости и ограничитель сигнала преобразователя физической величины скорости препятствуют выходу соответствующих величин сигналов за диапазон, определяемый областью применения электропривода. Сумма сигналов ограничителя величины сигнала регулятора скорости и ограничителя сигнала преобразователя физической величины скорости, вырабатываемая суммирующим устройством, поступает на устройство формирования управляющих воздействий, которое вместе с датчиком положения ротора образует замкнутый контур управления с местной обратной связью по положению вала двигателя. Сигналы устройства формирования управляющих воздействий определяют последовательность и длительность включения активных элементов силового преобразователя, коммутирующих обмотки двигателя. 1 ил.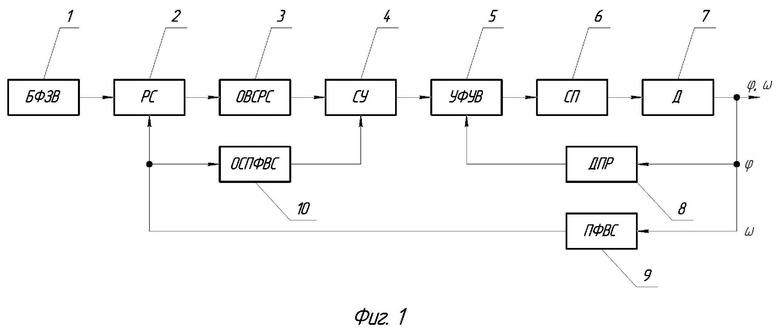
Система управления преобразователя электропривода с регулируемой скоростью с синхронным бесщеточным двигателем на постоянных магнитах, содержащая блок формирования задающих воздействий, регулятор скорости, получающий величину управляющего сигнала уставки скорости с блока формирования задающих воздействий и образующий замкнутый контур управления с главной обратной связью, формируемой преобразователем физической величины скорости, чувствительный элемент которого установлен на валу двигателя, ограничитель величины сигнала регулятора скорости, не позволяющий величине сигнала регулятора скорости выходить за границы определённого диапазона, суммирующее устройство, которое складывает величину сигнала, полученного с ограничителя величины сигнала регулятора скорости с величиной сигнала, полученного с ограничителя сигнала преобразователя физической величины скорости, который, в свою очередь, получает величину сигнала с преобразователя физической величины скорости, устройство формирования управляющих воздействий, получающее выходной сигнал с суммирующего устройства и образующее замкнутый контур управления с местной обратной связью, формируемой датчиком положения ротора двигателя, чувствительный элемент которого установлен на валу двигателя, силовой преобразователь, получающий управляющие воздействия от устройства формирования управляющих воздействий и коммутирующий обмотки двигателя в соответствии с заданным алгоритмом управления.
| СИСТЕМА УПРАВЛЕНИЯ СКОРОСТЬЮ ВРАЩЕНИЯ ВЕНТИЛЬНОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2021 |
|
RU2789839C1 |
| Способ векторного управления синхронным электродвигателем с постоянными магнитами на роторе | 1987 |
|
SU1681371A1 |
| СИСТЕМА УПРАВЛЕНИЯ СКОРОСТЬЮ ВРАЩЕНИЯ ВЕНТИЛЬНОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2021 |
|
RU2789839C1 |
| JP 3107384 A, 07.05.1991 | |||
| CN 101034865 B, 06.10.2010. | |||

