Область техники
Заявленная группа изобретений относится к области контроля, и оно касается системы и способа контроля уровня жидкости в деаэраторе на основе управления временной последовательностью и вычисления обратной функции.
Уровень техники
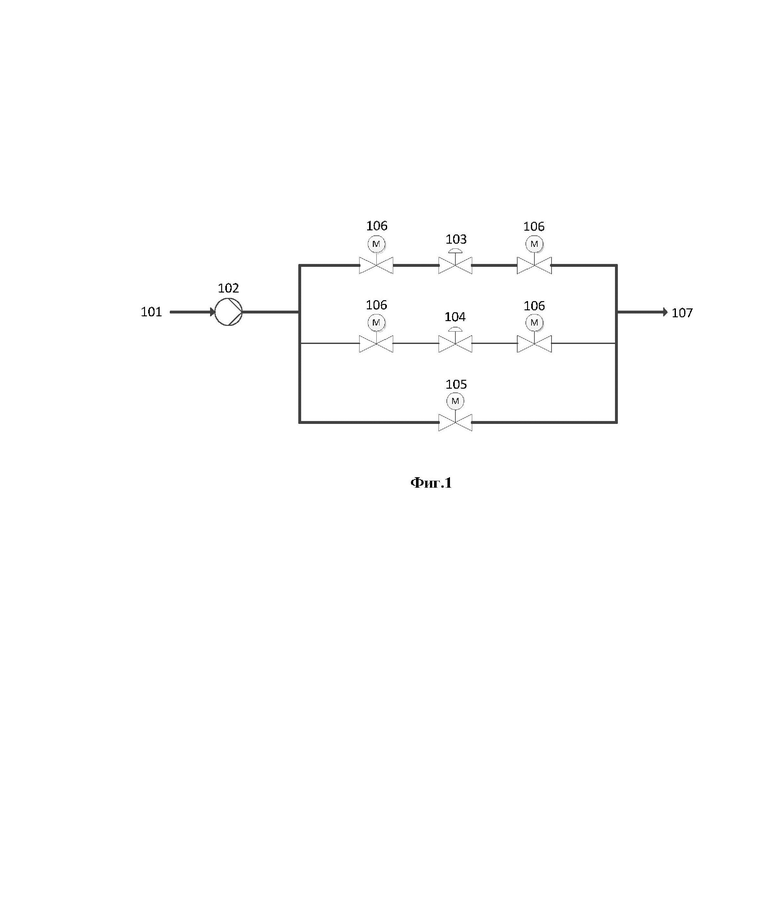
Для более стабильного контроля уровня жидкости в деаэраторе на многих энергоблоках предусматриваются трубопроводы и клапаны с разной пропускной способностью и параллельным расположением, предназначенные для управления расходом конденсационной воды, поступающей в деаэратор, см. схему 1. Как правило, при низкой нагрузке блока и потребности в питательной воде не более 1800 т/ч, контроль уровня в деаэраторе производится с помощью клапана с малым расходом, при высокой нагрузке блока и потребности в питательной воде более 1800 т/ч, контроль уровняв деаэраторе производится с помощью клапана с большим расходом или совместно контролировать уровень в деаэраторе с помощью клапанов с большим и малым расходами. Расположение оборудования контроля уровня в деаэраторе и способ контроля на блоках 5 и 6 Тяньваньской АЭС было основано на этом подходе, поскольку команда на положения клапана должна быть назначена двум клапанам, при проведении логических испытаний для контроля уровня в деаэраторе выявлено много проблем с исходным проектом, наиболее серьезный недостаток – невозможность реализовать автоматическое и безвозмущенное переключение регулятора и клапанов. Эти недостатки оказывают весьма непродуктивное воздействие на безопасную эксплуатацию энергоблоков, поэтому необходимо оптимизировать существующую логику управления.
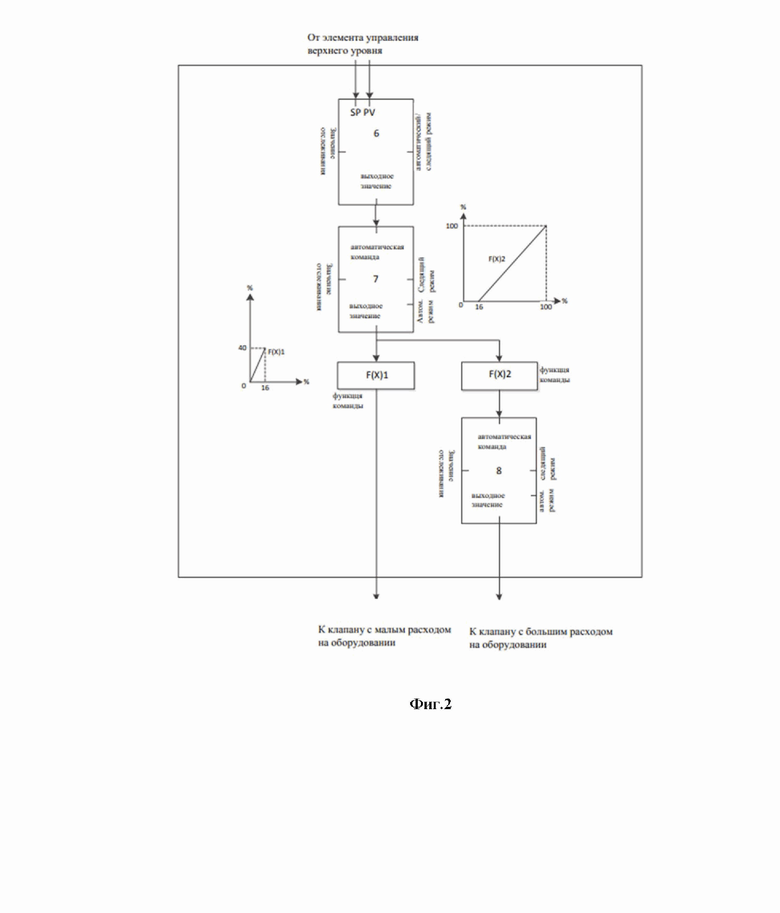
Как показано на схеме 2, в существующем методе контроля выход регулятора PI подключен к контакту ''автоматической команды'' ручного манипулятора регулятора, а ''выходное значение'' ручного манипулятора регулятора распределяет общую команду на положения клапана через функцию F1(X) и функцию F2(X), при этом команда после вычисления функции F1 (X) непосредственно воздействует на малый клапан, а команда после вычисления F2(X) действует на большой клапан через ручной манипулятор клапана с большим расходом. Важные контакты, такие как "режим отслеживания", "Значение отслеживания", "Автоматический режим" модуля ручного манипулятора AMAN для реализации безвозмущенного переключения, "следящий/автоматический режима", "Значение отслеживания" для PID модуля регулятора PI и т.д., являются конфигурациями. Основными характеристиками являются:
1) Отсутствует логика отслеживания регулятора PI в неавтоматическом режиме ручного манипулятора регулятора;
2) В ручном манипуляторе регулятора, ручном манипуляторе клапана с большим расходом отсутствует логика отслеживания;
3) В клапане с малым расходом отсутствует ручной манипулятор и связанная с ним логика управления.
4) Режим использования клапана является одиночным, и свободное сочетание ручного автоматического управления большим клапаном и малым клапаном не может быть выполнено. Поэтому возникают следующие проблемы: при включении в автоматический режим ручного манипулятора регулятора и ручного манипулятора клапана не может быть реализовано безвозмущенное переключение, что приводит к сильному встряхиванию регулятора PI и может даже привести к отключению турбоагрегата и останову реактора; невозможно реализовать ручное и автоматическое управление малым клапаном отдельно, невозможно реализовать свободное сочетание ручного и автоматического управления большим и малым клапанами, управление более не достаточно гибкое, применимость плохая, и способность справляться с неисправностями и техническим обслуживанием клапанов в рабочем режиме слабая.
Раскрытие сущности изобретения
Технический результат настоящего изобретения заключается в предоставлении системы и способа контроля уровня в деаэраторе на основе управления временной последовательностью и вычисления обратной функции, которые могут обеспечивать безвозмущенное переключение между ручным манипулятором регулятора и ручным манипулятором клапана.
Технические мероприятия данного изобретения указаны ниже:
Система контроля уровня жидкости в деаэраторе включает в себя регулятор PI, ручной манипулятор регулятора и ручной манипулятор клапана с большим расходом, указанный регулятор PI подаёт сигнал общей команды автоматического управления положением клапана на ручной манипулятор регулятора, который преобразуется в входной сигнал автоматического управления большим клапаном через ручной манипулятор регулятора и направляется в ручной манипулятор клапана с большим расходом;
Также включает в себя общий блок распределения команд на положение клапана, соединенный с выходным концом ручного манипулятора регулятора, ручной манипулятор клапана с малым расходом, соединенный с выходным концом общего блока распределения команды на положение клапана;
Блок вычисления значений незвозмущенного отслеживания, соединяющийся с входным концом ручного манипулятора регулятора;
Два блока управления временной последовательностью запуска режима отслеживания и включения в автоматический режим, один из них подключен к входному концу ручного манипулятора клапана с малым расходом, а другой подключен к входным концам регулятора PI, ручного манипулятора регулятора и ручного манипулятора большого клапана соответственно.
Блок управления временной последовательностью запуска режима отслеживания и включения в автоматический режим, соединяющийся с общим блоком распределения команд на положение клапана и входным концом ручного манипулятора клапана с малым расходом, блок определения режима работы клапанов, подключенный к входным клеммам общего блока распределения команд на положение клапанов, блока вычисления значения невозмущённого отслеживания и одного из блоков управления временной последовательностью запуска режима отслеживания и включения в автоматический режим;
Описанный ручной манипулятор клапана с малым расходом отправляет команду управления малому клапану отдельно;
Блок определения режимов работы клапанов предназначается для определения ручного и автоматического режимов работы большого клапана и малого клапана;
Общий блок распределения команд на положение клапана используется для переключения различных диапазонов управления между отдельным автоматическим режимом малого клапана и автоматическим режимом обоих клапанов;
Блок управления временной последовательностью запуска режима отслеживания и включения в автоматический режим предназначается для входа в режим отслеживания перед вводом в автоматический режим, чтобы команды верхнего и нижнего уровней были согласованы, а затем в следующую секунду перейти в автоматический режим.
Блок вычисления значений незвозмущенного отслеживания предназначается для расчета значений отслеживания в разных режимах. Описанный блок определения режимов работы клапанов, путем вызова состояния по включению и отключению ручного и автоматического режимов большого клапана, малого клапана, так же и по оценки логики, выводит 4 режима работы: отдельный автоматический режим большого клапана, отдельный автоматический режим малого клапана, автоматический режим обоих клапанов и ручной режим обоих клапанов, и позволяет, что сигнал определения 4 режимов работы может быть вызван другим блоком зоны.
Описанные сигналы для определения 4 режимов следующие: при обеспечении двух условий, именно когда большой клапан введен в автоматический режим, малый клапан не введен в автоматический, по схеме И подаётся сигнал “отдельный автоматический режим большого клапана”; при обеспечении двух условий, именно когда малый клапан введен в автоматический режим, большой клапан не введен в автоматический режим, по схеме И подаётся сигнал “отдельный автоматический режим малого клапана”; при обеспечении двух условий, именно когда большой клапан введен в автоматический режим, малый клапан тоже введен в автоматический режим, по схеме И подаётся сигнал “автоматический режим обоих клапанов”; при обеспечении двух условий, именно когда большой клапан не введен в автоматический режим, малый клапан тоже не введен в автоматический режим, по схеме И подаётся сигнал “ручной режим обоих клапанов”;
Указанный общий блок распределения команд на положение клапана выводит сигнал команды на открытие большого клапана. Сигнал команды на открытие большого клапана передается непосредственно в место интерфейса автоматической команды ручного манипулятора большого клапана, или в соответствии с ручным и автоматическим режимами, в котором находится в то же время, проводится выбор из двух режимов (отдельного автоматического режима малого клапана и не отдельного автоматического режима малого клапана) и вывод, выходное значение передается в место интерфейса автоматической команды на ручной манипулятор клапана с малым расходом.
Описанный общий блок 3 распределения команд на положение клапана выводит сигнал команды по степени открытия большого клапана через функциональный модуль F2(X); Через функциональные модули F1(X) и F5(X) осуществляется выбор из отдельного автоматического режима малого клапана и не отдельного автоматического режима малого клапана и вывод; среди них, F1(X) составляет y1=2.5x1,0≤x1≤16,0≤y1≤40; F5(X) составляет y5=2.78x5, 0≤x5≤36, 0≤y5≤100; F2(X) составляет y2=1.19(x2-16), 16≤x2≤100, 0≤y2≤100. Как x1, так и x2 и x5 являются общими командными сигналами на положения клапана, собранными соответствующими функциями, y1 – команда на степень открытия малого клапана для не отдельного автоматического режима малого клапана, y5 – команда на степень открытия малого клапана для отдельного автоматического режима малого клапана», y2 – команда на степень открытия большого клапана.
Описанный блок управления временной последовательностью запуска режима отслеживания и включения в автоматический режим используют импульсные модули и модули задержки, которые отдельно соединяются с четырьмя сигналами: ввод малого клапана в автоматический режим, переключение малого клапана в ручной режим, переключение большого клапана в ручной режим, ввод большого клапана в автоматический режим, для реализации автоматического режима и образования следящих сигналов для ручного манипулятора регулятора, регулятора PI.
При вводе в автоматический режим малого клапана сигналы передаются одновременно в импульсный модуль и модуль задержки времени соответственно, сигнал, переданный в импульсный модуль, немедленно срабатывает как сигнал короткого отслеживания 2-секундного импульса, выводится в интерфейс режима отслеживания ручного манипулятора малого клапана и в контакт ввода логического элемента «ИЛИ», сигнал, переданный в модуль задержки времени, выводится через 3 секунды задержки, сформируется сигнал команды на ввод в автоматический режима малого клапана, и передается в интерфейс автоматического режима ручного манипулятора малого клапана;
При вводе в автоматический режим большого клапана сигналы передаются одновременно в импульсный модуль и модуль задержки времени соответственно, сигнал, переданный в импульсный модуль, немедленно срабатывает как сигнал короткого отслеживания 2-секундного импульса, выводится в интерфейс режима слежения ручного манипулятора большого клапана и в контакт ввода логического элемента «ИЛИ», сигнал, переданный в модуль задержки времени, выводится через 3 секунды с задержкой, сформируется сигнал команды на ввод в автоматический режима большого клапана, и передается в интерфейс автоматического режима ручного манипулятора большого клапана;
При переключении малого клапана на ручной режим, сигнал передается в импульсный модуль, который немедленно срабатывает как сигнал короткого отслеживания с импульсом 2 секунды, выводится на входной контакт логического элемента ИЛИ;
При переключении большого клапана на ручной режим, сигнал передается в импульсный модуль, который немедленно срабатывает как сигнал короткого отслеживания с импульсом на 2 секунды, выводится на входной контакт логического элемента ИЛИ;
Когда логический элемент ИЛИ получает не менее одного из 2-секундных импульсных сигналов, сформированных по операциям ввода малого клапана в автоматический режим, переключения малого клапана в ручной режим, ввода большого клапана в автоматический режим и переключения большого клапана в ручной режим, на его выходе будет сформирован 2-секундный импульсный сигнал короткого отслеживания для ручного манипулятора регулятора, который отправляется в интерфейс режима отслеживания ручного манипулятора регулятора.
Когда автоматический сигнал состояния ручного манипулятора показывает «1», он непосредственно преобразуется в команду на начало автоматического вычисление регулятором PI, эта команда передаётся в интерфейс автоматического/следящего режима регулятора PI, чтобы регулятор PI вошел в автоматический режим. Когда автоматический сигнал состояния ручного манипулятора показывает «0», непосредственно преобразуется в команду, по которой регулятора PI начинает следящий расчёт, эта команда передаётся в интерфейс автоматического/следящего режима регулятора PI, чтобы регулятор PI вошел в следящий режим.
Описанный блок вычисления значений незвозмущенного отслеживания включает в себя два сумматора, а именно первый сумматор и второй сумматор, и включает в себя три модуля выбора, а именно первый модуль выбора – модуль выбора отдельного автоматического режима малого клапана, и второй модуль выбора – модуль выбора отдельного автоматического режима большого клапана, а третий модуль выбора представляет собой модуль выбора автоматического режима обоих клапанов. Блок вычисления значений незвозмущенного отслеживания вычисляет выходное значение ручного манипулятора малого клапана через функциональный модуль F3(X) и F6(X), соответственно, и выходное значение ручного манипулятора большого клапана через функциональный модуль F4(X).
Посредством вычисления F3(X) выводится сигнал значения отслеживания малого клапана в «не отдельном автоматическом режиме малого клапана» и передается на вход первого сумматора.
Посредством вычисления F6(X) выводится сигнал значения отслеживания малого клапана в «отдельном автоматическом режиме малого клапана» и передается на вход первого модуля выбора.
Посредством вычисления F4(X) выводится сигнал значения отслеживания большого клапана и передается на вход первого сумматора и второго сумматор соответственно.
Выходные сигналы F3(X) и F4(X) вычисляются первым сумматором для формирования сигналов значения отслеживания в автоматическом режиме обоих клапанов и передаются в третий модуль выбора.
Сигналы F4(X) и константы коррекции вычисляются вторым сумматором для формирования сигнала значения отслеживания в отдельном автоматическом режиме большого клапана и передаются во второй модуль выбора.
Выход третьего модуля выбора представляет собой сигнал конечного значения отслеживания, который передается на интерфейс значения отслеживания ручного манипулятора регулятора 7.
Когда малый клапан находится в отдельном автоматическом режиме, выход трех модулей выбора составляет: первый модуль выбора выбирает и выводит сигнал значения отслеживания малого клапана в режиме “отельный автоматический режим малого клапана", рассчитанный с помощью F6(X). Второй модуль выбора выбирает и выводит выходное значение первого модуля выбора. Третий модуль выбора выбирает выходное значение второго модуля выбора, то есть конечным выходным значением является сигнал значения отслеживания малого клапана в "отдельном автоматическом режиме малого клапана", рассчитанный с помощью F6(X).
Когда большой клапан находится в отдельном автоматическом режиме, выход трех модулей выбора составляет: первый модуль выбора выбирает выходное значение и передает его второму модулю выбора, но оно не выбрано. Второй модуль выбора выводит выходное значение второго сумматора, т.е. сигнал значения отслеживания в отдельном автоматическом режиме большого клапана. Третий модуль выбора выбирает и выводит выходное значение второго модуля выбора, т.е. конечным выходным значением является сигнал значения отслеживания большого клапана, передаваемый вторым сумматором в отдельном автоматическом режиме.
При автоматическом режиме обоих клапанов выход трех модулей выбора составляет: когда выходные значения, выбранные первым модулем выбора и вторым модулем выбора, передаются в третий модуль выбора, но они не выбраны. Третий модуль выбора выводит выходное значение первого сумматора, т.е. сигнал значения отслеживания в автоматическом режиме обоих клапанов, а конечным выходным значением является сигнал значения слежения в автоматическом режиме большого клапана, передаваемый вторым сумматором.
С помощью описанной системы контроля уровня в деаэраторе на основе управления временной последовательностью и вычисления обратной функции, способ контроля уровня в деаэраторе на основе управления временной последовательностью и вычисления обратной функции выполняет следующие операции:
Шаг 1: При включении клапанов с малым или большим расходом в автоматический режим рабочий сигнал поступает одновременно в блок определения режима работы клапанов и во 2-ой блок управления временной последовательностью запуска режима отслеживания и включения в автоматический режим.
Шаг 2: Блок определения режимов работы клапанов немедленно завершает определение режима работы клапана и формирует сигнал режима работы клапана, который отправляется в общий блок распределения команд на положение клапана и блок вычисления значений незвозмущенного отслеживания.
Шаг 3: Блок управления временной последовательностью запуска режима отслеживания и включения в автоматический режим сразу формирует следящий сигнал клапана и отправляется в ручной манипулятор клапана с малым расходом или в ручной манипулятор клапана с большим расходом; формирует следящий сигнал ручного манипулятора регулятора и отправляется в ручной манипулятор регулятора; формирует автоматический/следящий сигнал регулирования PI, отправляется в регулятор PI.
Шаг 4: Ручной манипулятор клапана с малым расходом или ручной манипулятор клапана с большим расходом получает следящий сигнал, генерируемый блоком управления временной последовательностью запуска режима отслеживания и включения в автоматический режим, и сигнал ввода клапана в автоматический режим, а также входной командный сигнал ввода автоматического управления ручным манипулятором малого клапана или ручным манипулятором большого клапана от общего блока распределения команд на положение клапана. Когда ручной манипулятор клапана с малым расходом или ручной манипулятор клапана с большим расходом получает следящий сигнал, генерируемый блоком управления временной последовательностью запуска режима отслеживания и включения в автоматический режим, ручной манипулятор клапана с малым расходом или ручной манипулятор клапана с большим расходом сразу поступает в следящий режим, значением отслеживания является выходное значение ручного манипулятора малого клапана или ручного манипулятора большого клапана в предыдущий временной момент, и сигнал команды на конечное положение клапана, который выводится в оборудование на месте, в то же время сигнал команды на конечное положение клапана также отправляется в блок вычисления значений незвозмущенного отслеживания.
Шаг 5: Блок вычисления значений незвозмущенного отслеживания получает сигнал режима работы клапана от блока определения режимов работы клапанов, а также сигнал команды на конечное положение клапана ручного манипулятора малого клапана и ручного манипулятора большого клапана, вычисляет и генерирует сигнал значения отслеживания ручного манипулятора регулятора и отправляет его в ручной манипулятор регулятора.
Шаг 6: Ручной манипулятор регулятора получает сигнал отслеживания ручного манипулятора регулятора и сигнал значения отслеживания ручного манипулятора регулятора блока вычисления значений незвозмущенного отслеживания, генерируемые блоком управления временной последовательностью запуска режима отслеживания и включения в автоматический режим, формирует общий сигнал выходной команды положения клапана в режиме отслеживания ручного манипулятора регулятора, передает их в общий блок распределения команды на положение клапана и регулятор PI.
Шаг 7: Регулятор PI получает сигнал отслеживания регулятора PI, генерируемый блоком управления временной последовательностью запуска режима отслеживания и включения в автоматический режим, немедленно вызывает общий сигнал команды положения клапана от ручного манипулятора регулятора, формирует выходную команду в режиме отслеживания регулятора PI, передает ее в ручной манипулятор регулятора.
Шаг 8: Общий блок распределения команд на положение клапана получает сигнал рабочего режима клапана, генерируемый блоком определения режимов работы клапанов, и общий сигнал команды на положение клапана ручного манипулятора регулятора, вычисляет и формирует входную команду автоматического управления для ручного манипулятора малого клапана или ручного манипулятора большого клапана, и отправляет её в ручной манипулятор клапана с малым расходом или ручной манипулятор клапана с большим расходом.
Значительный эффект настоящего изобретения заключается в следующем:
1) Путем добавления блока определения режимов работы клапанов, блока управления временной последовательностью запуска режима отслеживания и включения в автоматический режим и блока вычисления значений незвозмущенного отслеживания, а также реконфигурации реализуется незвозмущенное переключение регулятора и клапана в ручном и автоматическом режимах;
2) За счет добавления ручного манипулятора малого клапана реализуется более гибкое и отдельное ручное/автоматическое управление малым клапаном;
За счет добавления ручного манипулятора малого клапана и оптимизации конфигурации имеющегося ручного манипулятора большого клапана, реализуются4 способа ручного и автоматического комбинированного управления, что дает пользователям больше возможностей выбора.
Краткое описание чертежей
Фиг. 1 – Схема расположения трубопроводов и клапанов для контроля уровня в деаэраторе;
на схеме: 101 - конденсатор, 102 - конденсатный насос, 103 - большой регулирующий клапан, 104 - малый регулирующий клапан, 105 - электрический байпасный клапан, 106 - электрический запорный клапан, 107 - деаэратор.
Фиг. 2 – Принципиальная схема существующего способа контроля уровня в деаэраторе.
Фиг. 3 – Принципиальная схема системы контроля уровня в деаэраторе на основе управления временной последовательностью и вычисления обратной функции.
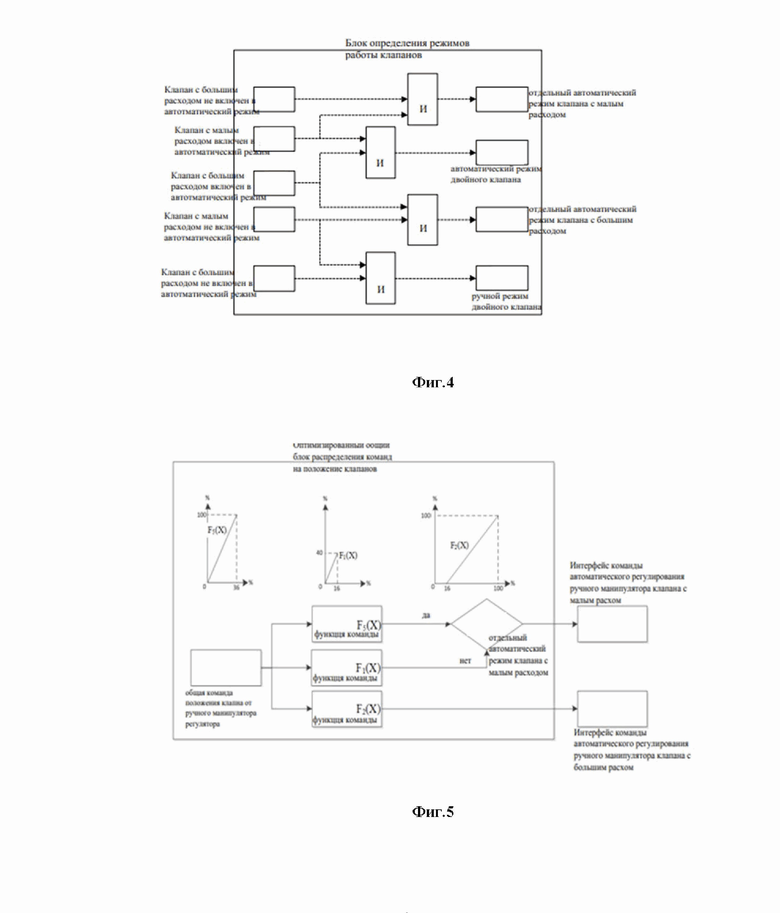
Фиг. 4 – Принципиальная схема блока определения режимов работы клапанов.
Фиг. 5 – Принципиальная схема общего блока распределения команд на положение клапана.
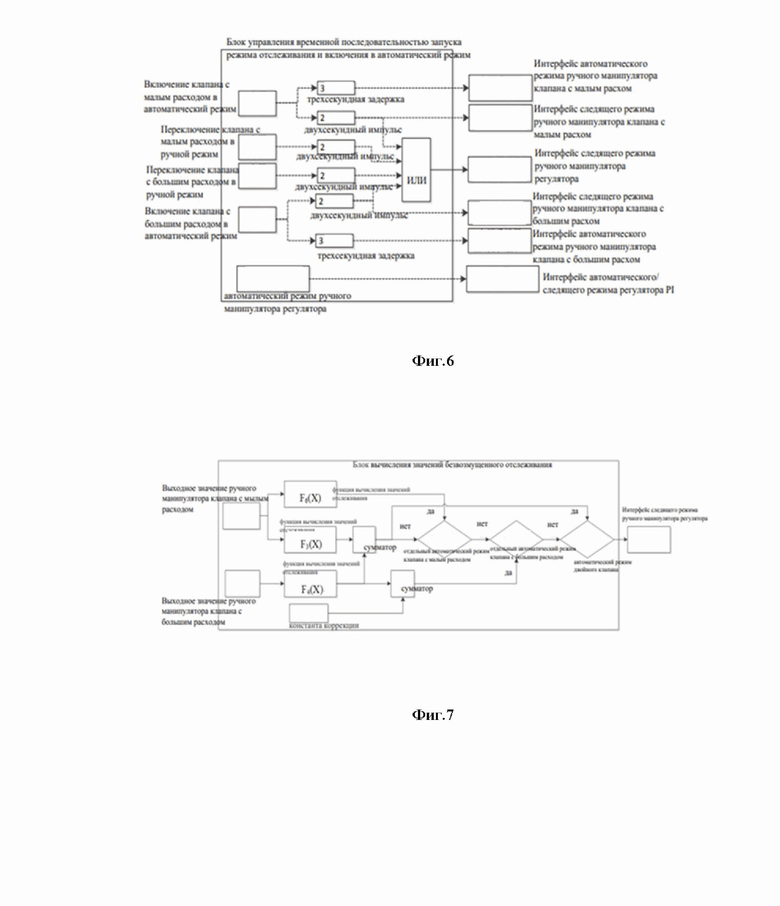
Фиг. 6 – Принципиальная схема блока управления временной последовательностью запуска режима отслеживания и включения в автоматический режим.
Фиг. 7 – Принципиальная схема блока вычисления значений незвозмущенного отслеживания.
На схеме: 1 - ручной манипулятор клапана с малым расходом; 2 - блок определения режимов работы клапанов; 3 - общий блок распределения команд на положение клапана; 4 - блок управления временной последовательностью запуска режима отслеживания и включения в автоматический режим; 5 - блок вычисления значений незвозмущенного отслеживания; 6 - регулятор PI; 7 - ручной манипулятор регулятора; 8 - ручной манипулятор клапана с большим расходом.
Осуществление изобретения
Ниже приведено дополнительное описание настоящего изобретения с помощью схем и конкретного способа реализации.
Как показано на фиг. 2, система контроля в существующем проекте включает регулятор PI 6, ручной манипулятор регулятора 7 и ручной манипулятор клапана с большим расходом 8. Среди них регулятор PI 6 принимает сигналы заданного значения и фактического значения от логики управления верхнего уровня, преобразует их в общий командный сигнал положения клапана, который передается в ручной манипулятор регулятора 7, а ручной манипулятор регулятора 7 преобразует его в общий командный сигнал положения клапана, и передает этот сигнал на входной конец оси X командной функции F1(X) и F2(X), соответственно. После вычисления F1(X) выход по оси Y формирует командный сигнал на степень открытия малого клапана, непосредственно воздействующий на малый клапан. После вычисления F2(X) выход по оси Y формирует входной сигнал автоматического управления большим клапаном и отправляет его в ручной манипулятор 8 большого клапана, который преобразует его в окончательный командный сигнал по степени открытия большого клапана и отправляет его в большой клапан.
Среди них математическая формулировка командной функции F1(X) – y1=2.5x, 0≤x1≤16, 0≤y1≤40; математическая формулировка командной функции F2(X) – y2=1.19(x2-16), 16≤x2≤100, 0≤y2≤100;
x1 и x2 – общий командный сигнал на положение клапана, y1 – команда на степень открытия малого клапана, y2 – команда на степень открытия большого клапана.
Как показано на фиг. 3, в новой проектной системе контроля:
1) Добавлен ручной манипулятор 1 малого клапана, который предназначается для выполнения отдельной операции с малым клапаном.
2) Добавлен блок 2 определения режимов работы клапанов, который предназначается для определения ручного/автоматического режима работы большого и малого клапанов.
3) Добавлен общий блок распределения команд на положение клапана 3, который предназначается для реализации переключения различного диапазона управления между режимом отдельного автоматического управления малым клапаном и автоматическим режимом управления двойным клапаном.
4) Добавлен блок управления временной последовательностью запуска режима отслеживания и включения в автоматический режим 4, который предназначается для реализации входа в режим отслеживания перед вводом в автоматический режим, после того как команды верхнего и нижнего уровней согласованы, в следующую секунду войти в автоматический режим. Этот модуль является одним из основных модулей для обеспечения безвозмущенного переключения.
5) Добавлен блок вычисления значений незвозмущенного отслеживания 5, который предназначается для вычисления значений отслеживания в разных режимах. Этот модуль является одним из основных для обеспечения безвозмущенного переключения.
6) Включить модуль ручного манипулятора AMAN (включая ручной манипулятор клапана с малым расходом 1, ручной манипулятор регулятора 7, ручной манипулятор клапана с большим расходом 8, указанные на схеме 3) и PID регулятора PI 6, используемые для контактов отслеживания и контактов включения логики управления ими в автоматический режим, вызвать соответствующие сигналы от блока управления временной последовательностью запуска режима отслеживания и включения в автоматический режим 4 и блока вычисления значений незвозмущенного отслеживания 5, таким образом, переконфигурация создает новый способ управления, позволяющий осуществлять невозмущённое переключение.
Как показано на фиг. 4, принцип работы блока определения режимов работы клапанов 2 заключается в следующем.
При обеспечении двух условий, именно когда большой клапан введен в автоматический режим, малый клапан не введен в автоматический, через логический элемент И выводится сигнал “отдельный автоматический режим большого клапана”. При обеспечении двух условий, именно когда малый клапан введен в автоматический режим, большой клапан не введен в автоматический режим, через логический элемент И выводится сигнал “отдельный автоматический режим малого клапана”; при обеспечении двух условий, именно когда большой клапан введен в автоматический режим, малый клапан тоже введен в автоматический режим, по схеме И подаётся сигнал “автоматический режим обоих клапанов”. При обеспечении двух условий, именно когда большой клапан не введен в автоматический режим, малый клапан тоже не введен в автоматический режим, через логический элемент И выводится сигнал “ручной режим обоих клапанов”; сигналы 4 режимов работы могут быть вызваны блоками других зон.
Путем вызова ручного/автоматического режима большого клапана и малого клапана провести простую логическую оценку конфигурации, выводить 4 режима работы: отдельный автоматический режим большого клапана, отдельный автоматический режим малого клапана, автоматический режим обоих клапанов и ручной режим обоих клапанов, таким образом, сигналы 4 режимов работы могут быть вызваны блоками других зон.
Как показано на схеме 5, принцип работы общего блока определения команд на положение клапана 3 заключается в следующем.
F1(X) является командной функцией «Не отдельный автоматический режим малого клапана», предназначается для преобразования общей команды положения клапана в автоматическую команду малого клапана в режиме «не отдельный автоматический режим малого клапана», математическая формулировка –y1=2.5x1, 0≤x1≤16, 0≤y1≤40. F5(X) является командной функцией «Отдельный автоматический режим малого клапана», предназначается для преобразования общей команды положения клапана в автоматическую команду на малый клапан в режиме «Отдельный автоматический режим малого клапана», математическая формулировка –y5=2.78x5, 0≤x5≤36, 0≤y5≤100; F2(X) является командной функцией большого клапана, предназначается для преобразования общей команды на положения клапана в команду на включение большого клапана в автоматический режим, математическая формулировка – y2=1.19(x2-16), 16≤x2≤100, 0≤y2≤100. (x1 и x2 – общий командный сигнал положения клапана, y1 – команда на степень открытия малого клапана в не отдельном автоматическом режиме малого клапана, y5 – команда на степень открытия малого клапана в отдельном автоматическом режиме малого клапана, y2 – команда на степень открытия большого клапана).
Когда функциональный модуль F2(X) принимает выходное значение от манипулятора регулятора 7 (то есть общую команду на положения клапана) на входной конец оси X командной функции F2(X), после вычисления F2(X) сигнал команды на степень открытия большого клапана выводится на оси YF2(X), сигнал команды на степень открытия большого клапана передается непосредственно в автоматический командный интерфейс ручного манипулятора большого клапана.
Когда функциональный модуль F5(X) принимает выходное значение от манипулятора регулятора 7 (то есть общую команду положения клапана) на входной конец оси X командной функции F5(X), после вычисления F5(X) сигнал команды на степень открытия малого клапана в отдельном автоматическом режиме малого клапана выводится по оси YF5(X), сигнал команды на степень открытия малого клапана передается в модуль выбора.
Когда функциональный модуль F1(X) принимает выходное значение от манипулятора регулятора 7 (то есть общую команду на положения клапана) на входной конец оси X командной функции F1(X), после вычисления F1(X) сигнал команды по степени открытия малого клапана в не отдельном автоматическом режиме малого клапана выводится на оси YF1(X), сигнал команды по степени открытия малого клапана передается в модуль выбора;
когда модуль выбора принимает выходные значения от F5(X) и F1(X) одновременно, выходные данные будут выбраны в соответствии с ручным/автоматическим режимов данный момент. Когда малый клапан находится в отдельном автоматическом режиме малого клапана, выводится значение из F5(X); когда малый клапан находится в не отдельном автоматическом режиме малого клапана, выводится значение из F1(X). Выходное значение модуля выбора передается в автоматический командный интерфейс ручного манипулятора малого клапана.
Как показано на схеме 6, блок управления временной последовательностью запуска режима отслеживания и включения в автоматический режим 4 использует импульсный модуль и модуль задержки, которые отдельно соединяются с четырьмя сигналами: ввод малого клапана в автоматический режим, переключение малого клапана в ручной режим, переключение большого клапана в ручной режим, ввод большого клапана в автоматический режим, для реализации автоматического режима, кроме того, и создает следящие сигналы для ручного манипулятора регулятора, регулятора PI. Сигналы, подаваемые настоящим блоком, доступны для вызова другими блоками или модулями. В основном используется для реализации входа в режим отслеживания перед вводом в автоматический режим, после того как команды верхнего и нижнего уровней согласованы, в следующую секунду войти в автоматический режим
При вводе в автоматический режим малого клапана сигналы передаются одновременно в импульсный модуль и модуль задержки времени соответственно, сигнал, переданный в импульсный модуль, немедленно срабатывает как сигнал короткого отслеживания 2-секундного импульса, выводится в интерфейс режима отслеживания ручного манипулятора малого клапана и в контакт ввода логического элемента «ИЛИ», сигнал, переданный в модуль задержки времени, выводится с задержкой на3 секунды, сформируется сигнал команды на ввод в автоматический режима малого клапана, и передается в интерфейс автоматического режима ручного манипулятора малого клапана;
При вводе в автоматический режим большого клапана сигналы передаются одновременно в импульсный модуль и модуль задержки времени соответственно, сигнал, переданный в импульсный модуль, немедленно срабатывает как сигнал короткого отслеживания 2-секундного импульса, выводится в интерфейс режима отслеживания ручного манипулятора большого клапана и в контакт ввода логического элемента «ИЛИ», сигнал, переданный в модуль задержки времени, выводится с задержкой на 3 секунды, сформируется сигнал команды на ввод в автоматический режима большого клапана, и передается в интерфейс автоматического режима ручного манипулятора большого клапана;
При переключении малого клапана на ручной режим, сигнал передается в импульсный модуль, который немедленно срабатывает как сигнал короткого отслеживания с импульсом 2 секунды, выводится на входной контакт логического элемента ИЛИ;
При переключении большого клапана на ручной режим, сигнал передается в импульсный модуль, который немедленно срабатывает как сигнал короткого отслеживания с импульсом 2 секунды, выводится на входной контакт логического элемента ИЛИ;
Когда логический элемент ИЛИ получает не менее одного из 2-секундных импульсных сигналов, сформированных по операциям ввода малого клапана в автоматический режим, переключения малого клапана в ручной режим, ввода большого клапана в автоматический режим и переключения большого клапана в ручной режим, на его выходе будет сформулирован2-секундный импульсный сигнал короткого отслеживания для ручного манипулятора регулятора, который отправляется в интерфейс режима отслеживания ручного манипулятора регулятора.
Когда автоматический сигнал состояния ручного манипулятора показывает «1», непосредственно преобразуется в команду, по которой начинается автоматическое вычисление регулятором PI, передаётся в интерфейс автоматического/следящего режима регулятора PI, чтобы регулятор PI вошел в автоматический режим. Когда автоматический сигнал состояния ручного манипулятора показывает «0», непосредственно преобразуется в команду, по которой начинается следящее вычисление регулятором PI, эта команда передаётся в интерфейс автоматического/следящего режима регулятора PI, чтобы регулятор PI вошел в следящий режим.
В связи с разницей во времени на 1 секунду между 2-секундным импульсным сигналом и 3-секундным сигналом задержки, создается эффект управления временной последовательностью, при котором происходит переход в "следящий режим", а затем в "автоматический режим".
Как показано на схеме 7, принцип работы блока вычисления значений незвозмущенного отслеживания 5 заключается в следующем:
В блоке вычисления значений незвозмущенного отслеживания 5 F3(X) - это функция вычисления значения отслеживания при не отдельном автоматическом режиме работы малого клапана, её математическая формулировка – y3=0.4x, 0≤x3≤40, 0≤y3≤16; F6 (X) – функция вычисления значения отслеживания при отдельном автоматическом режиме малого клапана, её математическая формулировка – y6=0.36x6, 0≤x6≤100, 0≤y6≤36; F4(X) – функция вычисления значения отслеживания большого клапана, её математическая формулировка – y4=0.84x4, 0≤x4≤100, 0≤y4≤84. (x3 и x6 – команда на степень открытия малого клапана, x4 – команда на степень открытия большого клапана, y3 – значение отслеживания малого клапана в не отдельном автоматическом режиме малого клапана, y6 – значение отслеживания малого клапана в отдельном автоматическом режиме малого клапана, y4 – значение отслеживания большого клапана).
Блок вычисления значений незвозмущенного отслеживания 5 включает в себя два сумматора, а именно первый сумматор и второй сумматор, и включает в себя три модуля выбора, а именно первый модуль выбора (модуль выбора отдельного автоматического режима малого клапана), и второй модуль выбора (модуль выбора отдельного автоматического режима большого клапана), и третий модуль выбора (модуль выбора автоматического режима обоих клапанов).
Когда функциональный модуль F3(X) принимает выходное значение от ручного манипулятора малого клапана 1 на входной конец оси X командной функции F3(X), после вычисления F3(X) сигнал значения отслеживания малого клапана в не отдельном автоматическом режиме малого клапана выводится по оси YF5(X), и передается на вход первого сумматора.
Когда функциональный модуль F6(X) принимает выходное значение от ручного манипулятора малого клапана 1 на входной конец оси X командной функции F6(X), после вычисления F6(X) сигнал значения отслеживания малого клапана в отдельном автоматическом режиме малого клапана выводится по оси YF6(X), и передается на вход первого модуля выбора.
Когда функциональный модуль F4(X) принимает выходное значение от ручного манипулятора большого клапана 8 на входной конец оси X командной функции F4(X), после вычисления F4(X) по оси Y F4(X) выводится сигнал значения отслеживания большого клапана, который передается на вход первого и второго сумматоров соответственно;
Сигналы от F3(X) и F4(X) вычисляются первым сумматором для формирования сигнала значения отслеживания в автоматическом режиме обоих клапанов и передаются в третий модуль выбора.
Сигналы от F3(X) и константы коррекции вычисляются вторым сумматором для формирования сигнала значения отслеживания в отдельном автоматическом режиме большого клапана и передаются на второй модуль выбора;
Значение константы коррекции принимается равным 0-200.
Когда малый клапан находится в отдельном автоматическом режиме, выход трех модулей выбора составляет: первый модуль выбора выбирает и выводит сигнал значения отслеживания малого клапана в режиме "отельного автоматического режима малого клапана", вычисленный с помощью F6(X). Второй модуль выбора выбирает и выводит выходное значение первого модуля выбора. Третий модуль выбора выбирает и выводит выходное значение второго модуля выбора, то есть конечным выходным значением является сигнал значения отслеживания малого клапана в "отдельном автоматическом режиме малого клапана", вычисленный с помощью F6(X);
когда большой клапан находится в отдельном автоматическом режиме, выход трех модулей выбора составляет: первый модуль выбора выбирает выходное значение и передает его второму модулю выбора, но оно не выбрано. Второй модуль выбора выводит выходное значение второго сумматора, т.е. сигнал значения отслеживания в отдельном автоматическом режиме большого клапана. Третий модуль выбора выбирает и выводит выходное значение второго модуля выбора, т.е. конечным выходным значением является сигнал значения отслеживания, передаваемый вторым сумматором в отдельном автоматическом режиме большого клапана.
При автоматическом режиме обоих клапанов выход трех модулей выбора составляет: когда выходные значения, выбранные первым модулем выбора и вторым модулем выбора, передаются в третий модуль выбора, но они не выбраны. Третий модуль выбора выводит выходное значение первого сумматора, т.е. сигнал значения отслеживания в автоматическом режиме обоих клапанов, а конечным выходным значением является сигнал значения отслеживания в автоматическом режиме большого клапана, передаваемый вторым сумматором.
Выход третьего модуля выбора представляет собой сигнал конечного значения отслеживания, который передается на интерфейс значения отслеживания ручного манипулятора регулятора 7.
Блок вычисления значений незвозмущенного отслеживания 5 вызывает выходные значения ручного манипулятора малого клапана 1 и ручного манипулятора большого клапана 8, а затем использует три модуля функций отслеживания F3(X), F4(X) и F6(X), которые имеют отношение обратной расчётной операции с тремя модулями командных функций F3(X), F4(X), F6(X) в общем блоке распределения команд на положение клапана 3, переключатель, сумматор, константу коррекции и вызывает сигнал режима блока определения режимов работы клапанов 2, и в результате формируется вычисление значения незвозмущенного отслеживания, которое может согласоваться с соответствующим режимом. Значения незвозмущенного отслеживания, вычисленные данным блоком, используются для ручного манипулятора малого клапана 1.
Согласно приведенному выше описанию, как показано на фиг. 3:
При режиме автоматического управления сигнал команды автоматического управления передается сверху вниз, процесс передачи заключается в следующем:
Шаг 1: Регулятор PI 6 получает автоматический сигнал, генерируемый блоком управления временной последовательностью запуска режима отслеживания и включения в автоматический режим 4, и немедленно выполняет традиционное вычисление PI в соответствии со значениями SP и PV верхней логики. Выходной конец регулятора PI 6 генерирует сигнал автоматической команды в режиме автоматического регулирования, передает его в ручной манипулятор регулятора 7.
Шаг 2: Автоматический сигнал от ручного манипулятора регулятора 7 и автоматический командный сигнал от регулятора PI 6, выходной конец ручного манипулятора регулятора 7 формирует общий сигнал команды положения клапана, выводимый в автоматическом режиме, передает его в общий блок распределения команды на положение клапана 3 и регулятор PI 6 (используется для режима отслеживания, передача сигнала в режиме отслеживания будет подробно описана)
Шаг 3: Общий блок распределения команд на положение клапана 3 принимает сигнал режима работы клапана, сформированный блоком определения режимов работы клапанов 2, и общий сигнал команды на положение клапана от ручного манипулятора регулятора 7, вычисляет и формирует входную команду автоматического управления ручным манипулятором малого клапана 1 или ручным манипулятором большого клапана 8 и отправляет ее на ручной манипулятор клапана с малым расходом 1 или ручной манипулятор клапана с большим расходом 8.
Шаг 4: Ручной манипулятор клапана с малым расходом 1 или ручной манипулятор клапана с большим расходом 8 получает сигнал по вводу клапана в автоматический режим, сформированный блоком управления временной последовательностью запуска режима отслеживания и включения в автоматический режим 4 и сигнал команды ввода автоматического управления ручным манипулятором малого клапана 1 или ручным манипулятором большого клапана 8 от общего блока распределения команд на положение клапана 3, ручной манипулятор клапана с малым расходом 1 или ручной манипулятор клапана с большим расходом 8 немедленно входят в автоматический режим, выходное значение исходит из входного командного сигнала автоматического управления ручным манипулятором малого клапана 1 или ручным манипулятором большого клапана 8 общего блока распределения команд на положение клапана 3 и из конечного командного сигнала положения клапана, выводимого на местное оборудование, и блока вычисления значений незвозмущенного отслеживания 5 (используется для режима отслеживания, передача сигнала в режиме отслеживания будет подробно описана).
При режиме отслеживания сигнал отслеживания и значение отслеживания более сложны, но, как правило, следуют принципу "снизу вверх", и передача осуществляется следующим образом
Шаг 1: При включении малого клапана или большого клапана в автоматический режим, рабочий сигнал одновременно поступает в блок определения режимов работы клапанов 2 и в блок управления временной последовательностью запуска режима отслеживания и включения в автоматический режим 4;
Шаг 2: Блок определения режимов работы клапанов 2немедленно завершает определение режима работы клапана и формирует сигнал режима работы клапана, который отправляется в общий блок распределения команд на положение клапана 3 и блок вычисления значений незвозмущенного отслеживания 5;
Шаг 3: Блок управления временной последовательностью запуска режима отслеживания и включения в автоматический режим 4 сразу создаёт следящий сигнал клапана и отправляется в ручной манипулятор клапана с малым расходом 1 или в ручной манипулятор клапана с большим расходом 8. Формулируется следящий сигнал ручного манипулятора регулятора и отправляется в ручной манипулятор регулятора 7; формулируется автоматический/следящий сигнал регулирования PI, отправляется в регулятор PI 6.
Шаг 4: Ручной манипулятор клапана с малым расходом 1 или ручной манипулятор клапана с большим расходом 8 получает следящий сигнал, генерируемый блоком управления временной последовательностью запуска режима отслеживания и включения в автоматический режим 4, и сигнал входа клапана в автоматический режим, а также входной сигнал команды на автоматическое управление ручным манипулятором малого клапана 1 или ручным манипулятором большого клапана 8 от общего блока распределения команд на положение клапана 3. Когда ручной манипулятор клапана с малым расходом 1 или ручной манипулятор клапана с большим расходом 8 получает следящий сигнал, генерируемый блоком управления временной последовательностью запуска режима отслеживания и включения в автоматический режим 4, ручной манипулятор клапана с малым расходом 1 или ручной манипулятор клапана с большим расходом 8 сразу поступает в режим отслеживания, значением отслеживания является выходное значение ручного манипулятора малого клапана 1 или ручного манипулятора большого клапана 8 в предыдущий временной момент и сигнал команды конечного положения клапана, который выводится на оборудование на месте, в то же время сигнал команды на конечное положение клапана также отправляется в блок вычисления значений незвозмущенного отслеживания 5;
Шаг 5: блок вычисления значений незвозмущенного отслеживания 5 получает сигнал режима работы клапана от блока определения режимов работы клапанов 2, а также сигнал команды на конечное положение клапана для ручного манипулятора малого клапана 1 и ручного манипулятора большого клапана 8, вычисляет и генерирует сигнал значения отслеживания ручного манипулятора регулятора и отправляет его в ручной манипулятор регулятора 7;
Шаг 6: Ручной манипулятор регулятора 7 получает следящий сигнал ручного манипулятора регулятора и следящий сигнал ручного манипулятора регулятора блока вычисления значений незвозмущенного отслеживания 5, генерируемые блоком управления временной последовательностью запуска режима отслеживания и включения в автоматический режим 4, формирует общий сигнал команды на положение клапана в режиме отслеживания ручного манипулятора регулятора 7, передает их в общий блок распределения команды на положение клапана 3 и регулятор PI 6;
Шаг 7: Регулятор PI 6 получает следящий сигнал регулятора PI, генерируемый блоком управления временной последовательностью запуска режима отслеживания и включения в автоматический режим 4, немедленно вызывает общий сигнал команды на положение клапана от ручного манипулятора регулятора 7, формирует выходную команду в режиме отслеживания регулятора PI 6, передает ее в ручной манипулятор регулятора 7;
Шаг 8: Общий блок распределения команд на положение клапана 3 получает сигнал рабочего режима клапана, генерируемый блоком определения режимов работы клапанов 2, и общий сигнал команды положения клапана ручного манипулятора регулятора 7, вычисляет и формирует входные команды автоматического управления для ручного манипулятора малого клапана 1 или ручного манипулятора большого клапана 8, и отправляет в ручной манипулятор клапана с малым расходом 1 или ручной манипулятор клапана с большим расходом 8.
В изложении, хотя шаги с 1 по 8 описаны отдельно, на самом деле между этими шагами существуют сигналы взаимного вызова, и все сигналы тоже возникают почти одновременно. За счет вышеуказанных 8 шагов выполняется отслеживание команды на конечное положение клапана до ручного манипулятора регулятора, регулятора PI с целью реализации незвозмущенного отслеживания.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДИСТАНЦИОННОЕ УПРАВЛЕНИЕ ДЛЯ ЭКСПЛУАТАЦИИ ШЛАНГА | 2004 |
|
RU2371748C2 |
| ИНТЕЛЛЕКТУАЛЬНОЕ УСТРОЙСТВО УПРАВЛЕНИЯ СТРЕЛОЙ | 2007 |
|
RU2344923C1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА УПРАВЛЕНИЯ ОСВЕЩЕНИЕМ | 2010 |
|
RU2561494C2 |
| БЛОК АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ (БАР) | 2010 |
|
RU2457530C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ГАЗАМИ, В ЧАСТНОСТИ, ДЛЯ ИСПЫТАТЕЛЬНОГО СТЕНДА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2005 |
|
RU2289113C2 |
| Устройство и способ автономного испытания регулятора скорости | 2022 |
|
RU2797654C1 |
| УСТРОЙСТВО РЕГУЛИРОВАНИЯ ПОДАЧИ РАБОЧЕЙ СРЕДЫ | 2005 |
|
RU2294555C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УСЛОВНОГО УПРАВЛЕНИЯ ЭЛЕКТРОННЫМ РЕГУЛЯТОРОМ ДАВЛЕНИЯ | 2014 |
|
RU2661252C2 |
| БЕСПРОВОДНАЯ АБОНЕНТСКАЯ СТАНЦИЯ ДЛЯ ДЕЦЕНТРАЛИЗОВАННОЙ ПЕРЕДАЧИ ДАННЫХ С МАЛЫМ РАДИУСОМ ДЕЙСТВИЯ | 2007 |
|
RU2411694C2 |
| БЫТОВОЙ ПРИБОР И СПОСОБ ЕГО УПРАВЛЕНИЯ | 2010 |
|
RU2495471C1 |

Группа изобретений относится к системе контроля уровня жидкости в деаэраторе и способу её работы. Технический результат - обеспечение безвозмущенного переключения между ручным манипулятором регулятора и ручным манипулятором клапана. В состав системы входят регулятор PI, ручной манипулятор регулятора, ручные манипуляторы клапана с большим и малым расходом, общий блок распределения команд на положение клапанов, блок вычисления невозмущённого отслеживания и блок определения режима работы клапанов. Контакты отслеживания ручного манипулятора клапана с малым расходом, ручного манипулятора регулятора, ручного манипулятора клапана с большим расходом и регулятора PI, и контакты включения логики управления ими в автоматический режим вызывают соответствующие сигналы от блока управления временной последовательностью запуска режима отслеживания и включения в автоматический режим и сигналы от блока вычисления значения безвозмущенного отслеживания, таким образом переконфигурация позволяет осуществлять безвозмущенное переключение, реализовать отдельное переключение ручного манипулятора регулятора и ручного манипулятора клапана при включении их в автоматический режим, что обеспечивает повышение применимости способа управления и гибкость выполнения операций. 2 н. и 10 з.п. ф-лы, 7 ил.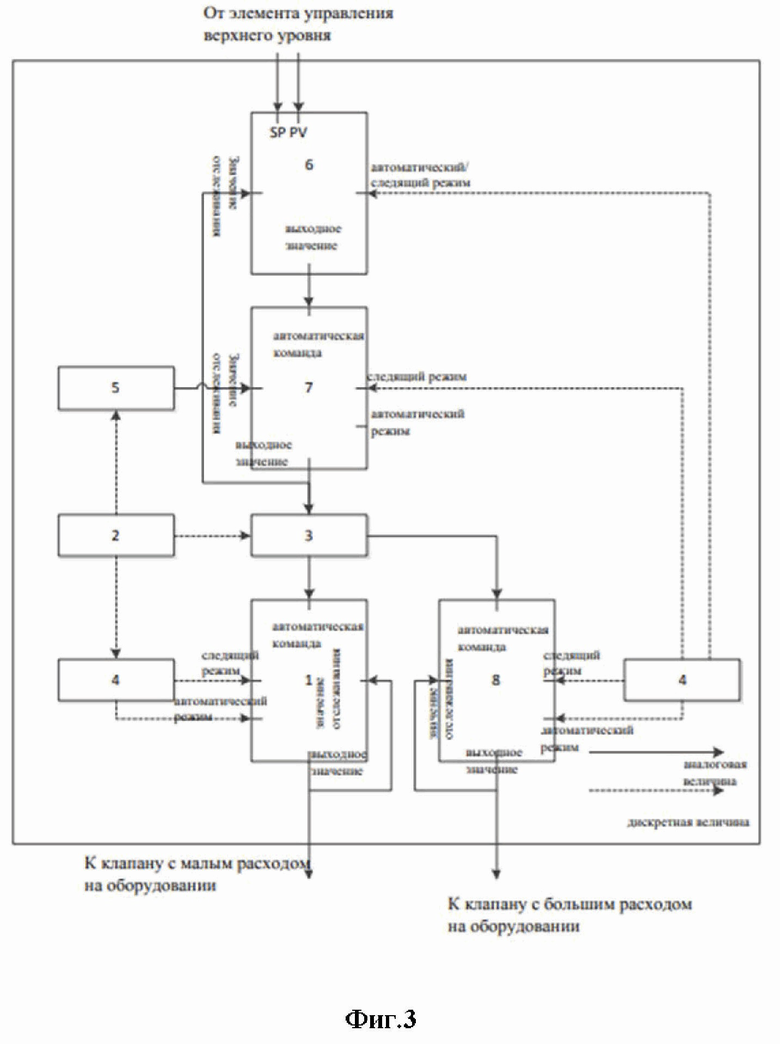
1. Система контроля уровня жидкости в деаэраторе, содержащая PI-регулятор, ручной манипулятор регулятора и ручной манипулятор клапана с большим расходом, при этом PI-регулятор выполнен с возможностью передачи общего командного сигнала автоматического регулирования положения клапана ручному манипулятору регулятора, этот сигнал от ручного манипулятора регулятора переключается на входной сигнал автоматического управления клапаном с большим расходом и отправляется ручному манипулятору клапана с большим расходом, отличающаяся тем, что
система также содержит общий блок распределения команд на положение клапанов, подключенный к выходной клемме ручного манипулятора регулятора, и ручной манипулятор клапана с малым расходом, подключенный к выходной клемме общего блока распределения команд на положение клапанов;
блок вычисления значения невозмущённого отслеживания, подключенный к входной клемме ручного манипулятора регулятора;
два блока управления временной последовательностью запуска режима отслеживания и включения в автоматический режим, один из которых подключен к входным клеммам общего блока распределения команд на положение клапанов и ручного манипулятора клапана с малым расходом, а другой подключен к входным клеммам PI-регулятора, ручного манипулятора регулятора и ручного манипулятора клапана с большим расходом соответственно;
блок определения режима работы клапанов, подключенный к входным клеммам общего блока распределения команд на положение клапанов, блока вычисления значения невозмущённого отслеживания и одного из блоков управления временной последовательностью запуска режима отслеживания и включения в автоматический режим;
при этом упомянутый ручной манипулятор клапана с малым расходом выполнен с возможностью передачи команды управления клапану с малым расходом отдельно;
блок определения режима работы клапанов используется для определения ручного и автоматического режимов работы клапанов с большим и малым расходом;
общий блок распределения команд на положение клапанов используется для переключения между отдельным автоматическим режимом клапана с малым расходом и автоматическим режимом обоих клапанов в разных диапазонах управления;
блок управления временной последовательностью запуска режима отслеживания и включения в автоматический режим используется для реализации функции включения в режим отслеживания перед запуском автоматического режима, и после согласования командного верхнего и нижнего уровней, он будет включен в автоматический режим в следующую секунду;
блок вычисления значения невозмущённого отслеживания используется для вычисления значений отслеживания в разных режимах.
2. Система по п.1, отличающаяся тем, что используя блок определения режима работы клапанов посредством включения или переключения клапанов с большим и малым расходом в ручной или автоматический режим, путём логического суждения изложенный блок определения режима работы клапанов выводит 4 режима работы, включая отдельный автоматический режим клапана с большим расходом, отдельный автоматический режим клапана с малым расходом, автоматический режим и ручной режим обоих клапанов, и сигнал суждения при 4 режимах работы может быть вызван блоками на других участках.
3. Система по п.2, отличающаяся тем, что сигналы суждения в 4 режимах являются следующими: при включении клапана с большим расходом в автоматический режим и не включении клапана с малым расходом в автоматический режим, в это время сигнал через «логический элемент И» выводится как сигнал отдельного автоматического режима клапана с большим расходом, при включении клапана с малым расходом в автоматический режим и не включении клапана с большим расходом в автоматический режим, в это время выходной сигнал через «логический элемент И» представляет собой сигнал отдельного автоматического режима клапана с малым расходом, при включении клапанов с большим и малым расходом в автоматический режим, в это время выходной сигнал через «логический элемент И» представляет собой сигнал автоматического режима обоих клапанов; при не включении клапанов с большим и малым расходом в автоматический режим, в это время сигнал через «логический элемент И» выводится как сигнал ручного режима обоих клапанов.
4. Система по п.1, отличающаяся тем, что общий блок распределения команд на положение клапанов выдает командный сигнал на степень открытия клапана с большим расходом, этот сигнал напрямую передается в интерфейсное место автоматических команд для ручного манипулятора клапана с большим расходом, или проводится выбор выхода отдельного и не отдельного автоматического режима клапанов с малым учетом нахождения их в ручном или автоматическом режимах, и выходное значение будет передано в интерфейсное место автоматических команд для ручного манипулятора клапана с малым расходом.
5. Система по п.4, отличающаяся тем, что общий блок распределения команд на положение клапанов выполнен с возможностью вывода командного сигнала по степени открытия клапана с большим расходом через функциональный модуль F2 (X); проводится выбор для выхода отдельного и не отдельного автоматического режима клапанов с малым расходом через функциональные модули F1 (X) и F5 (X); среди них F1 (X) равен y1 = 2.5x1, 0≤x1≤16, 0≤y1≤40; F5 (X) равен y5 = 2.78x5, 0≤x5≤ 36, 0≤y5≤100; F2 (X) равен y2 = 1,19 (x2-16), 16≤x2≤100, 0≤y2≤100; x1, x2 и x5 - общие командные сигналы положения клапана, собранные соответствующими функциями, y1 - команда степени открытия клапана с малым расходом при не отдельном автоматическом режиме клапана с малым расходом, y5 - команда степени открытия клапана с малым расходом при отдельном автоматическом режиме клапана с малым расходом, y2 - команда степени открытия клапана с большим расходом.
6. Система по п.1, отличающаяся тем, что блок управления временной последовательностью запуска режима отслеживания и включения в автоматический режим выполнен с возможностью осуществления операции включения в автоматический режим и образования сигналов отслеживания PI-регулятора и ручного манипулятора регулятора, используя импульсный модуль и модуль задержки времени, соединенные с четырьмя сигналами, в том числе, включая сигнал включения клапана с малым расходом в автоматический режим, сигнал переключения клапана с малым расходом в ручной режим, сигнал переключения клапана с большим расходом в ручной режим и сигнал включения клапана с большим расходом в автоматический режим.
7. Система по п.6, отличающаяся тем, что при включении клапана с малым расходом в автоматический режим сигнал передается в импульсный модуль и модуль задержки времени одновременно, сигнал, переданный в импульсный модуль, немедленно запускает как двухсекундный импульсный короткий сигнал отслеживания и выводится на интерфейс режима отслеживания ручного манипулятора клапана с малым расходом и входные контакты «логического элемента ИЛИ», а сигнал, переданный в модуль задержки времени, выводится через 3 секунды задержки, образует командный сигнал включения клапана с малым расходом в автоматический режим и передает его в интерфейс автоматического режима ручного манипулятора клапана с малым расходом;
при включении клапана с большим расходом в автоматический режим сигнал передается в импульсный модуль и модуль задержки времени одновременно, сигнал, передаваемый в импульсный модуль, немедленно запускается как двухсекундный импульсный короткий сигнал отслеживания и выводится на интерфейс режима отслеживания ручного манипулятора клапана с большим расходом и входные контакты «логического элемента ИЛИ», а сигнал, передаваемый в модуль задержки времени, выводится через 3 секунды задержки, образует командный сигнал включения клапана с большим расходом в автоматический режим и передает его в интерфейс автоматического режима ручного манипулятора клапана с большим расходом;
при переключении клапана с малым расходом на ручной режим сигнал передается в импульсный модуль и немедленно запускается как двухсекундный импульсный короткий сигнал отслеживания, который выводится на входные контакты «логического элемента ИЛИ»;
при переключении клапана с большим расходом на ручной режим сигнал передается в импульсный модуль и немедленно запускается как двухсекундный импульсный короткий сигнал отслеживания, который выводится на входные контакты «логического элемента ИЛИ».
8. Система по п.7, отличающаяся тем, что когда «логический элемент ИЛИ» получает один из 2-секундных импульсных сигналов, образованных при включении клапана с малым расходом в автоматический режим, переключении клапана с малым расходом на автоматический режим, включении клапана с большим расходом в автоматический режим и переключении клапана с большим расходом на автоматический режим, на его выходе образуется двухсекундный импульсный короткий сигнал отслеживания ручного манипулятора регулятора, который передается на интерфейс режима отслеживания ручного манипулятора регулятора.
9. Система по п.8, отличающаяся тем, что когда ручной манипулятор регулятора находится в автоматическом режиме, сигнал выводится как «1» и напрямую образуется в команду автоматического вычисления для PI-регулятора, после чего передается в интерфейс автоматического/отслеживающего режима PI-регулятора, и PI-регулятор переходит в автоматический режим; когда ручной манипулятор регулятора находится в автоматическом режиме, сигнал выводится как «0» и напрямую образуется в команду вычисления отслеживания для PI-регулятора, после чего передается в интерфейс автоматического/отслеживающего режима PI-регулятора, и PI-регулятор переходит в режим отслеживания.
10. Система по п.1, отличающаяся тем, что блок вычисления значения невозмущённого отслеживания включает в себя два сумматора: первый сумматор и второй сумматор, в состав блока также входят три модуля выбора: первый модуль выбора представляет собой модуль выбора для клапана с малым расходом при отдельном автоматическом режиме, второй модуль выбора является модулем выбора для клапана с большим расходом при отдельном автоматическом режиме, и третий модуль выбора является модулем выбора при автоматическом режиме обоих клапанов; блок вычисления значения невозмущённого отслеживания передает выходное значение ручного манипулятора клапана с малым расходом на вычисление через функциональные модули F3 (X) и F6 (X) соответственно, а выходное значение ручного манипулятора клапана с большим расходом передается на вычисление через функциональный модуль F4 (X);
по вычислению через F3 (X) выводится сигнал значения отслеживания клапана с малым расходом при «не отдельном автоматическом режиме для клапанов с малым расходом», и передается на вход первого сумматора;
в результате вычисления через F6 (X) выводится сигнал значения отслеживания клапана с малым расходом при «отдельном автоматическом режиме для клапанов с малым расходом», и передается на вход первого модуля выбора;
в результате вычисления через F4 (X) выводится сигнал значения отслеживания клапана с большим расходом, и передается на входы первого и второго сумматоров соответственно;
выходные сигналы F3 (X) и F4 (X) вычисляются первым сумматором для формирования сигнала значения отслеживания в автоматическом режиме обоих клапанов, который передается в третий модуль выбора;
сигналы F4(X) и константы коррекции вычисляются вторым сумматором для формирования сигнала значения отслеживания в отдельном автоматическом режиме клапана с большим расходом, который передается во второй модуль выбора;
выходным сигналом третьего модуля выбора является сигнал окончательного значения отслеживания, который передается в интерфейс значения отслеживания ручного манипулятора регулятора.
11. Система по п.10, отличающаяся тем, что когда клапан с малым расходом находится в отдельном автоматическом режиме, выходные сигналы трех модулей выбора оказываются: первый модуль выбора выбирает и выводит сигнал значения отслеживания клапана с малым расходом при «отдельном автоматическом режиме клапана с малым расходом», вычисляемый по F6 (X), и второй модуль выбора выбирает выход значения первого модуля выбора, а третий модуль выбора выбирает и выводит выходное значение второго модуля выбора, т.е. финальным выходным значением является сигнал значения отслеживания клапана с малым расходом при «отдельном автоматическом режиме клапана с малым расходом», вычисляемый по F6 (X);
когда клапан с большим расходом находится в отдельном автоматическом режиме, выходные сигналы трех модулей выбора отказываются: выходное значение, выбранное первым модулем выбора, передается второму модулю выбора, но не выбирается, второй модуль выбора выводит выходное значение второго сумматора, т.е. сигнал значения отслеживания клапана с большим расходом в отдельном автоматическом режиме, третий модуль выбора выбирает и выводит выходное значение второго модуля выбора, т.е. финальным выходным значением является сигнал значения отслеживания клапана с большим расходом при отдельном автоматическом режиме, передаваемый вторым сумматором;
в двухклапанном автоматическом режиме выходные сигналы трех модулей выбора оказываются: выходные значения, выбранные первым и вторым модулем выбора, передаются третьему модулю выбора, но не выбираются, третий модуль выбора выводит выходное значение первого сумматора, т.е. сигнал значения отслеживания в двухклапанном отдельном автоматическом режиме обоих клапанов, финальным выходным значением является сигнал значения отслеживания клапана с большим расходом при отдельном автоматическом режиме, передаваемый вторым сумматором.
12. Способ контроля уровня жидкости в деаэраторе, характеризующийся тем, что используют систему контроля уровня жидкости в деаэраторе на основе управления временной последовательностью и вычисления обратной функции для выполнения следующих операций:
шаг 1) при включении клапанов с малым или большим расходом в автоматический режим рабочий сигнал поступает одновременно в блок определения режима работы клапанов и во 2-й блок управления временной последовательностью запуска режима отслеживания и включения в автоматический режим;
шаг 2) блок определения режима работы клапанов немедленно завершает определение рабочего режима клапана и формирует сигнал рабочего режима клапана, который отправляют в общий блок распределения команд на положение клапанов и блок вычисления значения невозмущённого отслеживания;
шаг 3) блок управления временной последовательностью запуска режима отслеживания и включения в автоматический режим немедленно формирует сигнал отслеживания клапанов и передает его ручному манипулятору клапанов с малым или большим расходом,
формирует сигнал отслеживания ручного манипулятора регулятора и передает его ручному манипулятору регулятора,
формирует автоматический / отслеживающий сигнал PI-регулятора и отправляет его на PI-регулятор;
шаг 4) ручной манипулятор клапанов с малым или большим расходом получает сигнал отслеживания и сигнал о включении клапана в автоматический режим, сформированные блоком управления временной последовательностью запуска режима отслеживания и включения в автоматический режим, а также принимает входной сигнал команды автоматического управления ручным манипулятором клапанов с малым или большим расходом от общего блока распределения команд на положение клапанов, когда ручной манипулятор клапанов с малым или большим расходом принимает сигнал отслеживания, формированный блоком управления временной последовательностью запуска режима отслеживания и включения в автоматический режим, ручной манипулятор клапанов с малым или большим расходом немедленно переходит в режим отслеживания, а значением отслеживания является последнее выходное значение ручного манипулятора клапанов с малым или большим расходом, которое выводится на местное оборудование как окончательный командный сигнал о положении клапанов, и окончательный командный сигнал о положении клапанов также отправляется в блок вычисления значения невозмущённого отслеживания;
шаг 5) блок вычисления значения невозмущённого отслеживания по расчету формирует сигнал значения отслеживания ручного манипулятора регулятора и передает его ручному манипулятору регулятора, принимая сигнал рабочего режима клапана от блока определения режима работы клапанов и окончательный командный сигнал о положении клапана от ручного манипулятора клапанов с малым и большим расходом;
шаг 6) ручной манипулятор регулятора формирует общий командный сигнал о положении клапанов при режиме отслеживания ручного манипулятора регулятора и направляет его общему блоку распределения команд на положение клапанов и PI-регулятору, принимая сигнал отслеживания ручного манипулятора регулятора, формированный блоком управления временной последовательностью запуска режима отслеживания и включения в автоматический режим, а также сигнал значения отслеживания ручного манипулятора регулятора, образованный блоком вычисления значения невозмущённого отслеживания;
шаг 7) PI-регулятор немедленно вызывает общий командный сигнал о положении клапанов от ручного манипулятора регулятора, формирует выходную команду при режиме отслеживания PI-регулятора и направляет ее ручному манипулятору регулятора, принимая сигнал отслеживания PI-регулятора, сформированный блоком управления временной последовательностью запуска режима отслеживания и включения в автоматический режим;
шаг 8) общий блок распределения команд на положение клапанов по расчету формирует входную команду автоматического управления ручным манипулятором клапанов с малым или большим расходом и направляет ее ручному манипулятору клапанов с малым или большим расходом, принимая сигнал рабочего режима клапана от блока определения режима работы клапанов и общий командный сигнал о положении клапана от ручного манипулятора регулятора.
| СПОСОБ И УСТРОЙСТВО ДЛЯ УСЛОВНОГО УПРАВЛЕНИЯ ЭЛЕКТРОННЫМ РЕГУЛЯТОРОМ ДАВЛЕНИЯ | 2014 |
|
RU2661252C2 |
| БЛОК АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ (БАР) | 2010 |
|
RU2457530C1 |
| Прибор для отбирания средней пробы зерна | 1928 |
|
SU13310A1 |
| US 7270278 B2, 18.09.2007 | |||
| Устройство для закрепления объектов за бортом судна | 1977 |
|
SU692751A1 |

