Родственные заявки
[0001] В настоящей заявке испрашивается приоритет согласно предварительной заявке на патент США №62/598,260, поданной 13 декабря 2017 года и включенной в настоящую заявку посредством отсылки.
Область техники, к которой относится изобретение
[0002] Настоящее раскрытие относится к машинам вытеснительного типа, преобразующим энергию, в одном примере - к компрессорам объемного вытеснения, содержащим роторы с возможностью вращения в единственном направлении вращения для вытеснения рабочей текучей среды, содержащейся в рабочих камерах роторов. В одном примере роторы ротационной машины могут быть выполнены с возможностью изменения направления их вращения без модифицирования конструкций. В одном примере преимуществом раскрытой машины является, в частности, возможность достижения высоких степеней сжатия в сочетании с высоким давлением на выпуске и высокой объемной производительностью в случаях, где применяют одноступенчатое сжатие. Указанная ротационная машина выполнена с возможностью достижения сопоставимо высоких степеней расширения в сочетании с высоким давлением на всасывании и высокой объемной производительностью за единственную ступень.
Уровень техники
[0003] Для конечных пользователей многих механических изделий, например, насоса, компрессора или двигателя сгорания, более широкий рабочий диапазон зачастую является преимуществом с точки зрения стандартизации и устранения необходимости приобретения многочисленных компонентов для достижения того, чего можно было бы достигнуть с меньшим числом компонентов или одним компонентом.
[0004] Например, если речь идет о сжатии природного газа, то типовой диапазон давления в линиях транспорта в Северной Америке зачастую составляет от 200 до 1500 и вплоть до 1800 фунтов на квадратный дюйм избыточного давления (фнт./кв.дюйм изб.). В других примерах давление может составлять от 1500 до 1900 фнт./кв.дюйм изб. В других примерах давление может превышать 1900 фнт./кв.дюйм изб. Природный газ зачастую перемещают по транспортным трубопроводам под высоким давлением для уменьшения объема транспортируемого природного газа в 600 раз включительно. Предполагают, что со временем давление в скважинах эксплуатируемого месторождения природного газа будет падать по мере уменьшения притока. Поэтому во многих случаях нужно повышать давление природного газа в скважине для его добычи. В некоторых примерах давление будет повышено в 110 или более раз. В связи с тем, что со временем давление естественным образом падает до уровня ниже желаемого давления в линии выпуска, применяют ротационную машину (например, компрессор) для увеличения напорного потока в трубопровод более высокого давления. В некоторых случаях, если ротационная машина (например, компрессор) установлена изначально, повышение давления (т.е. отношение абсолютного давления на выпуске к абсолютному давлению на всасывании) может составлять 1.
[0005] Абсолютное давление - это сумма избыточного давления и атмосферного давления. Поэтому в некоторых случаях применения нужен компрессор, способный повышать давление газа в диапазоне от 1 до 110 раз или более от абсолютного давления на всасывании. В настоящее время, для удовлетворения потребностей в высоких степенях сжатия в сочетании с высоким давлением на выпуске, например, 1500 фнт./кв.дюйм изб., зачастую нужны несколько ступеней в поршневом компрессоре, а в некоторых примерах - его применение в комбинации с винтовым компрессором(-ами), повышающим давление до поршневого компрессора (-ов). Винтовые компрессоры обычно имеют предел по максимальному давлению на выпуске 350 фнт./кв.дюйм изб. При применении в комбинации с поршневым компрессором, что является обычной практикой, они служат для повышения давления на стороне системы, расположенной выше по потоку.
[0006] Как известно, температура газа тем выше, чем выше степень повышения давления/сжатия, при этом для надлежащей работы некоторых компонентов, например, арматуры и жидких смазочных материалов, нужны более низкие температуры. Поэтому в отрасли сложилась практика регулирования температуры на стороне выпуска компрессоров. Свод правил 618 Американского нефтяного института (АНИ) рекомендует ограничивать максимальную температуру на выпуске значением 300°F (150°С). В поршневых компрессорах указанную температуру регулируют путем промежуточного охлаждения газа между ступенями, а в винтовых компрессорах, зачастую являющихся одноступенчатыми, применяют впрыск жидкого масла.
[0007] Для достижения высоких степеней сжатия за единственную ступень сжатия обычно применяют охлаждение впрыском жидкости. Охлаждение впрыском жидкости известно в области маслозаполненных винтовых компрессоров. В отрасли не принято охлаждать жидкостью поршневые компрессоры, в которых «водяной удар» может привести к перенапряжению компонентов и, потенциально, к отказу. «Водяной удар» иногда также обозначают более общим термином «гидравлический удар». Данный термин обозначает всплеск или волну давления, возникающую из-за принудительной остановки или внезапного изменения направления движения текучей среды. Данное изменение давления вызывает большую обеспокоенность в случае жидкостей, а не газов, поскольку жидкости меньше поддаются сжатию, чем газы. Обычно считается, что жидкости не поддаются сжатию. Кроме того, более плотные жидкости имеют более высокое сопротивление давлению. Более того, жидкости обычно не поддаются сжатию, в связи с чем может произойти скачок давления в конце хода поршня в цилиндре, содержащем жидкости и газы. Так как в некоторых примерах охлаждение жидкостью может не применяться для регулирования температуры газа без уменьшения рабочей частоты вращения поршневых компрессоров, обычно применяют многоступенчатое (с числом цилиндров более одного) сжатие, при котором газ, давление которого повышают приблизительно в 4 раза, охлаждают в теплообменнике перед его поступлением на последующую ступень сжатия. Многоступенчатое сжатие зачастую связано с применением физически крупных поршневых компрессоров и множества взаимодействующих компонентов. Масло на пол не иные винтовые компрессоры хорошо себя зарекомендовали благодаря высокой частоте вращения (и, как следствие, высокой объемной производительности) в дополнение к высоким степеням сжатия, а способность винтовых компрессоров эффективно создавать давление на выпуске обычно ограничена из-за взаимозацепляющейся геометрической конструкции роторов, при которой происходит их разведение (отклонение ротора) и утечки. Отклонение ротора может стать причиной снижений КПД и соприкосновения ротора с корпусом, могущего привести к отказу машины.
[0008] Попытки эксплуатации маслонаполненных винтовых компрессоров с давлениями на выпуске значительно выше 350 фнт./кв.дюйм изб. приводили к износу и/или иным проблемам в механической части, что делает такие устройства ненадежными и, как следствие, они не находят широкого применения. Таким образом, ограничение в отношении высоких давлений на выпуске для винтовых компрессоров обусловлено механической конструкцией, а не недостаточным стремлением к достижению очень высоких степеней сжатия в сочетании с высокими давлениями на выпуске за единственную ступень и с регулируемыми температурами или недостаточным пониманием их преимуществ. Пример известного преимущества таких рабочих условий приведен в патенте США №5,674,053 «Компрессор высокого давления с регулируемым охлаждением на этапе сжатия», включенного в настоящий документ посредством отсылки, где сказано, что «одноступенчатое сжатие газа атмосферного давления до 4000 фнт./кв.дюйм изб. привело бы к достижению температуры газа свыше 600°С. Данная температура превышает желаемую температуру эксплуатации арматуры, уплотнений и иных компонентов компрессора. Во избежание применения материалов с необычными свойствами, зачастую желательно поддерживать по существу более низкие температуры заряда газа. «По существу» в данном случае означает «по большей части, но необязательно полностью», «приблизительно». В случаях, когда нужно было сжать газ за одну ступень со степенями сжатия 30, 40 или 80 к 1, чрезмерные температуры газа являлись препятствием для одноступенчатого сжатия».
[0009] В маслонаполненных винтовых компрессорах охлаждающее масло обычно впрыскивают во впускной канал, что во многих случаях применения не так эффективно, как впрыск хладагента во время фактического события сжатия. В патенте США №3,820,923 особо подчеркнуто, что: «В одноступенчатом или многоступенчатом ротационном компрессоре, впрыск масла непосредственно во впускной канал не так эффективен, как впрыск масла непосредственно в камеру сжатия». В указанном патенте также раскрыто преимущество распыленного впрыска на последних ступенях сжатия для максимальной эффективности, а также приведен пример сжатия в степени 8:1 за одну ступень.
[00010] В патенте США 6,266,660 В1 раскрыто устройство охлаждения распыленной жидкостью, а также указано, что: «Идея распыления жидкости в камеру сжатия как средство поглощения тепла, образующегося при сжатии, широко известна и обычно именуется в области техники «влажное сжатие».
[00011] Кроме того, в патенте США №2,280,845 указано, что «В системе воздушного компрессора, если срок ограничен (например, тысячными секунды), теплопередачу можно увеличить путем применения более мелких распыленных капель за счет увеличения отношения площади поверхности к объему». В патенте США №4,478,553 раскрыты предпочтительные размеры капель - от 2 до 10 микрон. В заявке на патент США US 2011/0204064 А1 раскрыты предпочтительные размеры капель <100 микрон. В патенте «Распылительное устройство» US 20030122266 А1 раскрыто охлаждение впрыском масла в направлении, по меньшей мере, частично противоположном направлению потока газа для потенциально более высокой эффективности охлаждения.
[00012] Идея почти изотермического сжатия и расширения за счет распыления жидкой текучей среды в камеры сжатия и расширения в качестве средства поглощения тепла, образующегося при сжатии, раскрыта в патенте США 4,984,432, наряду с применением теплообменника в ходе процесса.
[00013] Например, наличие широкого рабочего диапазона компрессора включало бы не только наличие диапазона давлений всасывания от приемлемо низких до высоких (т.е. от значения ниже атмосферного давления до 2000 фнт./кв.дюйм изб.), диапазона давлений на выпуске от приемлемо низких до высоких (т.е. от значений, близких к атмосферному давлению, до 2000 фнт./кв.дюйм изб.) и диапазона степеней сжатия от приемлемо низких до высоких (т.е. от приблизительно 1:1 до 80:1 или выше), но и нескольких диапазонов частот вращения (т.е. от приблизительно 0 оборотов в минуту (об./мин) до 3600 об./мин или выше) для приспособления к различным электрическим приводам и приводящим двигателям с одновременной минимизацией или устранением необходимости в регулировании частоты вращения вала привода относительно вала компрессора.
[00014] На рынке имеются компрессоры, работающие с частотами вращения от 200 до 20000 об./мин, и специалисту в данной области техники может быть очевидно, что компрессор без ограничения частоты вращения каким-либо конкретным значением был бы более конкурентоспособен на рынке, а также то, что чем выше возможная частота вращения, тем больший потенциал имеет компрессор в части производительности при том или ином размере и весе.
[00015] Поскольку специалисты в данной области техники считают изотермическое сжатие/расширение самым перспективным процессом во многих случаях применения, многие исследователи и изобретатели опробовали различные способы достижения данной цели, зачастую используя идеи, десятилетиями известные в области техники, однако им не удавалось достичь рентабельности по ряду причин, в том числе - из-за высоких непроизводительных затрат механической части, себестоимости оборудования, ограниченных рабочих диапазонов и непрактичной конструкции.
[00016] Учитывая вышеизложенное, технической задачей настоящего изобретения является создание рентабельного, по существу изотермического, компрессора и/или детандера.
[00017] Еще одной задачей настоящего изобретения является создание по существу изотермического компрессора и/или детандера с относительно низкими непроизводительными затратами механической части.
[00018] Еще одной задачей настоящего изобретения является создание по существу изотермического компрессора и/или детандера с очень широким рабочим диапазоном.
Сущность изобретения
[00019] Приведенные выше примеры указывают на то, что существует потребность в высоких степенях сжатия (т.е. 80:1 или выше, например) за единственную ступень в сочетании с высокими давлениями на выпуске (т.е. вплоть до 4000 фнт./кв.дюйм изб. или выше, например), а также на то, что регулирование температуры на выпуске (т.е. <250°С) из-за высоких степеней сжатия возможно за счет охлаждение жидкостью, в том числе - охлаждения жидкостью путем распыления охлаждающей среды непосредственно в камеру сжатия и на более поздних ступенях сжатия.
[00020] Слово «изотермический» в данном случае означает любой неадиабатический процесс сжатия или расширения, повышенная эффективность или иное энергетическое преимущество которого обусловлено преднамеренной передачей тепла количеству газа, подлежащего сжатию или расширению, или от него.
[00021] В некоторых случаях применения существует потребность в компрессоре, могущем работать в широком диапазоне частот вращения в сочетании с очень высокими степенями сжатия за единственную ступень и высокими давлениями на выпуске. Конструктивные ограничения винтовых компрессоров (надежная работа при давлениях на выпуске значительно выше 350 фнт./кв.дюйм изб.) и поршневых компрессоров (невозможность охлаждения жидкостью из-за гидравлического затвора) хорошо известны. Отсутствие серийных компрессоров природного газа, сочетающих в себя известные конструктивные признаки высокой производительности с высокими давлениями на выпуске и возможностью охлаждения впрыском, с разнообразными частотами вращения и сценариями добычи, уже существующими в отрасли добычи природного газа, можно, в первую очередь, объяснить такими ограничениями механической части, как надежность, безопасность, эффективность, способность выдерживать нагрузку и долговечность компонентов.
[00022] Усеченно-конические формы, образующие ротационные машины объемного вытеснения, обеспечивают возможность высоких расходов перекачки и степеней сжатия в сочетании с жидкостями, как раскрыто, например, в патенте США №8562318 В1: «Высокая степень сжатия в мультифазном насосе предусматривает наличие в рабочей текучей среде доли заполнения жидкостью свыше 0.5%». Другими признаками усеченно-конических форм являются: возможность работы при высоких частотах вращения и высоких степенях сжатия, как раскрыто в документе US 6,497,564 В2, где в одном из вариантов осуществления указано: «В частности, это обеспечивает преимущество для роторов с высокой частотой вращения и при высоких степенях сжатия».
[00023] Слово «усеченный» в данном случае служит для определения сегмента или участка геометрической формы или поверхности. Например, выражение «усеченно-сферическая поверхность» обозначает поверхность, лежащую на сфере, а не только сегмент полной сферы. Иными словами, слово «усеченный» в данном случае служит для обозначения части поверхности твердого тела. Например, слово «усеченно-сферический», если речь идет о наружной поверхности роторов, обозначает поверхность, лежащую на сфере. Сферическая поверхность имеет области, которые были удалены, т.е. поверхность не образует сплошную сферу. Аналогичным образом, «усеченно-цилиндрическая поверхность» - это поверхность, лежащая на цилиндре, а «усеченно-коническая поверхность» - поверхность, лежащая на конусе.
[00024] Ротационная машина, раскрытая в одном примере в настоящем документе, относится в целом к системе сжатия газа или пара, включающей в себя ротационный компрессор для сжатия газообразной или парообразной «рабочей текучей среды». Поэтому выражения «ротационная машина» и «компрессор» будут использоваться как синонимы для обозначения одного и того же устройства. Слово «масло» может в общем смысле использоваться в значении «охлаждающая текучая среда» для обеспечения по существу изотермического процесса сжатия или расширения за единственную ступень. То есть выражения «охлаждающая текучая среда» и «масло» могут использоваться как синонимы в настоящем раскрытии в том смысле, что они оба обозначают охлаждающую среду или текучую среду подшипника, могущую иметь более высокую теплоемкость, чем рабочая текучая среда, и, в связи с этим, влиять на температуру рабочей текучей среды в процессе сжатия или расширения. В одном примере охлаждающая среда представляет собой воду, а текучая среда подшипника - масло. В другом примере и охлаждающая среда, и текучая среда подшипника являются текучими средами, могущими представлять собой масло. Температура охлаждающей текучей среды до поступления в ротационную машину ниже, выше или равна температуре рабочей текучей среды, поступающей в ротационную машину. Компрессор в одном примере содержит корпус и крышку корпуса, каждый из которых в одном примере содержит расточки с непараллельными пересекающимися осями с установленными в них узлом ведущего ротора и узлом ведомого ротора, закрывающими торцы корпуса. В одном примере ведущий ротор и ведомый ротор имеют оси вращения, не расположенные на одной прямой и пересекающиеся. В одном примере ведущий ротор и ведомый ротор имеют проходящие радиально наружу усеченно-сферические поверхности. В одном примере, точка пересечения оси вращения ведущего ротора с осью вращения ведомого ротора, центр радиуса ведущего ротора и центр радиуса ведомого ротора - это одна и та же точка в пространстве. Выражения «ведущий» или «ведущие роторы» служат для обозначения ротора или роторов, приводимых во вращение внешним усилием. Выражение «ведомые роторы» служит для обозначения ротора или роторов, получающих вращательное усилие через ведущие роторы. Взаимозацепляющиеся роторы установлены с возможностью вращения вокруг осей роторов и взаимодействуют с примыкающей усеченно-сферической внутренней поверхностью с образованием камеры (камер сжатия) сжатия между ними. Поверхности корпуса ограничивают впускной канал низкого давления и выпускной канал высокого давления в проходе компрессора к взаимозацепляющимся роторам, камере сжатия и компонентам для подачи низконапорной рабочей текучей среды - всасываемого газа или пара - во впускной канал для сжатия в пределах камеры сжатия. И узел ведомого ротора, и узел ведущего ротора в одном примере содержат кольцо подшипника, содержащее поверхности гибридного подшипника, подробнее раскрытые ниже. Также раскрыты система регулирования с учетом теплового расширения и зубья шестерен с возможностью взаимного зацепления посредством зубчатой передачи. Кольцо в одном примере может примыкать к камере(-ам) сжатия с каналом, питающим множество камер. В одном примере гибридные подшипники могут содержать выход текучей среды в примыкающую полость шестерни, при этом шестерни постоянно погружены в высоконапорный газ. Соответствующие наружные усеченно-сферический поверхности указанных узлов роторов содержат многомерные (непланарные) самокомпенсирующиеся гибридные подшипники с выходом текучей среды в примыкающие камеры, что минимизирует или предотвращает потери из-за утечек рабочей текучей среды и паразитные потери, одновременно максимизируя несущую способность подшипника.
[00025] Соответствующие валы роторов в одном примере стабилизированы посредством усеченно-сферических гибридных подшипников, цилиндрических гибридных подшипников и гибридных упорных подшипников, с возможностью их применения в комбинации с цилиндрическими роликовыми подшипниками. В одном примере цилиндрические и/или гибридные упорные подшипники представляют собой новый самоустанавливающийся гидростатический подшипник, выполненный с возможностью обеспечения дополнительной способности воспринимать радиальные нагрузки, аксиальные нагрузки и нагрузки от изгибающего момента, обусловленные гидродинамическим эффектом. Давление текучей среды у внутреннего усеченно-сферического шара можно регулировать для оптимизации показателей работы гибридного подшипника. В одном примере узел ведомого ротора содержит скользящее кольцевое уплотнение с возможностью создания отношений давлений 0-110 или более и эффективного регулирования для уменьшения потока на 0-100% без необходимости отсечения компрессора. И узел ведомого ротора, и узел ведущего ротора в одном примере содержат съемный компонент(-ы), примыкающий к камере, тем самым минимизируя или устраняя утечку, в ином случае возникшую бы у внутренних радиальных усеченно-сферических поверхностей продольно отстоящих взаимозацепляющихся многозаходных роторов. Съемный узел узла ведомого ротора содержит распылительные форсунки большого объема с подачей охлаждающей среды через вал ведомого ротора, благодаря чему возникает факел распыла распыленных капель, направленный в камеру сжатия, по мере сжатия рабочей текучей среды и вращения камеры сжатия относительно примыкающего неподвижного корпуса. Слово «неподвижный» в значении «не движущаяся система отсчета» следует толковать в том смысле, например, что «неподвижный» корпус может образовывать фиксированную систему отсчета, при этом возможно его принудительное перемещение для транспортировки и т.п. Узел ведомого ротора содержит уравновешенный по нагрузке поворотный клапан с возможностью регулирования расхода охлаждающей среды от по существу нулевого до 100%-ного потока и внесения изменений в запуск и кульминацию впрыска в камеру сжатия. В одном примере узел ведущего ротора содержит постоянные углубленные каналы охлаждающей среды с аналогичными возможностями, не содержащие движущихся компонентов. В одном примере каналы текучей среды получают текучую среду независимо друг от друга. В одном примере новые распылительные форсунки текучей среды большого объема могут быть выполнены с возможностью снятия только впускной трубы, но не компонентов корпуса.
[00026] Ротационную машину можно применять в качестве компрессора, когда к ведущему валу подводят энергию, и/или для подвода работы к ведущему валу в случае применения в качестве детандера. Так как рабочий диапазон может быть в несколько раз больше, чем у известных установок, способных осуществлять как сжатие, так и расширение, данное техническое решение может идеально подходить для применения в накопителях энергии на сжатом воздухе (НЭСВ, англ. Compressed Air Energy Storage (CAES)). Выше по потоку от ротационной машины, работающей в качестве дожимного компрессора, можно применить эжекторную технологию для увеличения возможности изменения объемной производительности. Это позволит удобно вводить жидкие углеводороды с устья скважины или воду в новый многоступенчатый компрессор.
[00027] Указанные и прочие цели, преимущества и признаки раскрытого в настоящем документе изобретения станут очевидны из нижеследующего описания, прилагаемых чертежей и формулы изобретения. Также следует понимать, что признаки различных примеров осуществления, раскрытых в настоящем документе, не являются взаимоисключающими и могут существовать в разнообразных комбинациях и перестановках.
[00028] Согласно первому аспекту изобретения, предложена ротационная машина, содержащая: корпус, содержащий вогнутую усеченно-сферическую внутреннюю поверхность корпуса; первый ротор, содержащий выпуклую усеченно-сферическую наружную поверхность первого ротора, примыкающую к внутренней поверхности корпуса, по меньшей мере одну лопасть, ограничивающую по меньшей мере одну впадину, центр первого ротора в центре радиуса наружной поверхности первого ротора; гидростатический подшипник первого ротора, сформированный на наружной поверхности первого ротора; при этом гидростатический подшипник первого ротора содержит: по меньшей мере один канал текучей среды первого ротора через наружную поверхность первого ротора, поверхность, ограничивающую карман подшипника вокруг канала текучей среды первого ротора, по меньшей мере одну первую площадку вокруг первого кармана подшипника; при этом первая площадка выступает радиально наружу от первого кармана подшипника относительно центра первого ротора; и при этом первая площадка непосредственно примыкает к внутренней поверхности корпуса с образованием гидравлического уплотнения у нее.
[00029] В соответствии с одним из вариантов изобретения, гидростатический подшипник первого ротора образован структурой, включающей в себя по меньшей мере одну первую площадку на наружной поверхности первого ротора каждой по меньшей мере одной лопасти; причем структура по существу идентична на каждой по меньшей мере одной лопасти первого ротора.
[00030] В соответствии с одним из вариантов изобретения, гидростатический подшипник первого ротора образован многомерной структурой.
[00031] В соответствии с одним из вариантов изобретения, гидростатический подшипник включает в себя: источник текучей среды подшипника под давлением подачи текучей среды подшипника, при этом источник текучей среды подшипника связан по текучей среде с каналом текучей среды первого ротора; источник рабочей текучей среды с каналом текучей среды через корпус в камеру, частично ограниченную впадиной первого ротора, при этом рабочая текучая среда подлежит сжатию в камере до давления рабочей текучей среды по мере вращения первого ротора относительно корпуса; причем давление подачи текучей среды подшипника выше давления рабочей текучей среды.
[00032] В соответствии с одним из вариантов изобретения, ротационная машина дополнительно содержит: второй ротор, содержащий выпуклую усеченно-сферическую наружную поверхность второго ротора, примыкающую к внутренней поверхности корпуса, по меньшей мере одну лопасть, образующую по меньшей мере одну впадину, при этом впадина второго ротора расположена вокруг лопасти первого ротора, центр второго ротора в центре радиуса наружной поверхности второго ротора; гидростатический подшипник второго ротора, сформированный на наружной поверхности второго ротора; при этом гидростатический подшипник второго ротора содержит: по меньшей мере один канал текучей среды второго ротора через наружную поверхность второго ротора, поверхность, ограничивающую второй карман подшипника вокруг канала текучей среды второго ротора, вторую площадку вокруг второго кармана подшипника; при этом вторая площадка подшипника выступает радиально наружу от кармана подшипника относительно центра второго ротора; при этом площадка непосредственно примыкает к внутренней поверхности корпуса.
[00033] B соответствии с одним из вариантов изобретения, по меньшей мере гидростатический подшипник первого ротора радиально отстоит от впадины первого ротора.
[00034] В соответствии с одним из вариантов изобретения, ротационная машина дополнительно содержит: первый вал, проходящий от первого ротора, при этом первый вал расположен аксиально напротив лопастей первого ротора; канал текучей среды, связанный по текучей среде с по меньшей мере одним каналом текучей среды первого ротора; при этом канал текучей среды проходит по существу аксиально вдоль первого вала.
[00035] Согласно второму аспекту изобретения, предложена ротационная машина, содержащая: первый ротор, содержащий выпуклую усеченно-сферическую наружную поверхность первого ротора, примыкающую к внутренней поверхности корпуса, по меньшей мере одну лопасть, образующую по меньшей мере одну впадину, центр первого ротора в центре радиуса наружной поверхности первого ротора; при этом первый ротор содержит поверхность вставки первого ротора у центра радиуса лопасти, впадину, при этом поверхность вставки первого ротора имеет ось, по существу параллельную оси вращения первого ротора; первую вставку, расположенную с возможностью удаления в пределах поверхности вставки первого ротора; при этом первая вставка содержит усеченно-сферическую внутреннюю поверхность; и усеченно-сферическую вставку, вставленную с возможностью удаления в усеченно-сферическую внутреннюю поверхность первой вставки, и при этом первая вставка выполнена с возможностью взаимодействия со вторым ротором и образования гидравлического уплотнения у него.
[00036] В соответствии с одним из вариантов изобретения, ротационная машина дополнительно содержит: второй ротор, содержащий поверхность вставки второго ротора у центра радиуса лопасти, впадину второго ротора, при этом поверхность вставки второго ротора имеет ось, по существу параллельную оси вращения второго ротора; вторую вставку, расположенную с возможностью удаления в пределах поверхности вставки второго ротора; при этом вторая вставка второго ротора выполнена с возможностью взаимодействия с первой вставкой первого ротора с образованием гидравлического уплотнения у нее.
[00037] В соответствии с одним из вариантов изобретения, ротационная машина дополнительно содержит: по меньшей мере одну форсунку текучей среды на второй вставке; при этом по меньшей мере одна форсунка текучей среды расположена по существу по одной линии с впадинами второго ротора; по меньшей мере один канал текучей среды вставки, проходящий через вторую вставку ко второму ротору по существу параллельно оси вращения второго ротора; при этом канал текучей среды вставки проходит через второй ротор.
[00038] В соответствии с одним из вариантов изобретения, по меньшей мере одна форсунка текучей среды съемно прикреплена ко второй вставке.
[00039] В соответствии с одним из вариантов изобретения, в по меньшей мере одну форсунку текучей среды выборочно подают охлаждающую среду.
[00040] В соответствии с одним из вариантов изобретения, второй ротор прикреплен ко второму валу, содержащему по существу цилиндрическую наружную поверхность; при этом машина дополнительно содержит: множество проемов текучей среды в поверхности вала, проходящих по существу аксиально в пределах второго вала от каналов текучей среды вставки; при этом канал корпуса на корпусе расположен по одной линии с проемами текучей среды в поверхности вала для обеспечения прохода текучей среды от корпуса вокруг второго вала к по меньшей мере одной форсунке текучей среды.
[00041] В соответствии с одним из вариантов изобретения, ротационная машина содержит: множество радиально противоположных проемов в поверхности вала, радиально противоположно сформированных, соединенных по текучей среде с каналом текучей среды вставки.
[00042] В соответствии с одним из вариантов изобретения, ротационная машина содержит: скользящий цилиндр, прикрепленный к корпусу, охватывающий второй вал вокруг множества проемов в поверхности вала; при этом скользящий цилиндр содержит множество поверхностей, ограничивающих проемы в нем; при этом предусмотрена возможность последовательного выравнивания проемов скользящего цилиндра по одной линии с множеством проемов в поверхности вала с образованием временного канала текучей среды между каналом текучей среды корпуса и форсунками текучей среды.
[00043] В соответствии с одним из вариантов изобретения, скользящий цилиндр включает в себя: внутренний цилиндр с поверхностями, ограничивающими проемы скользящего цилиндра в нем; скользящий цилиндр с множеством поверхностей, ограничивающих проемы скользящего цилиндра в нем, расположенные по одной линии с поверхностями, ограничивающими проемы скользящего цилиндра во внутреннем цилиндре; при этом скользящий цилиндр плотно соединен с внутренним цилиндром и выполнен с возможностью вращения относительно него для регулирования выравнивания поверхностей, ограничивающих проемы скользящего цилиндра в скользящем цилиндре, относительно поверхностей, ограничивающих проемы скользящего цилиндра во внутреннем цилиндре, для выборочного ограничения потока текучей среды к форсункам текучей среды.
[00044] B соответствии с одним из вариантов изобретения, ротационная машина содержит: внутренний цилиндр с поверхностями, ограничивающими проемы скользящего цилиндра в нем; при этом предусмотрена возможность выборочной подачи текучей среды в проемы скользящего цилиндра во внутреннем цилиндре.
[00045] В соответствии с одним из вариантов изобретения, внутренняя поверхность первого ротора геометрически выполнена по форме, выбранной из перечня, включающего в себя: усеченный цилиндр, усеченный конус и многогранную призму.
[00046] Согласно третьему аспекту изобретения, предложена ротационная машина, содержащая: корпус; первый ротор с валом ротора в пределах корпуса, наружную поверхность с гидростатическим подшипником, выполненным с возможностью взаимодействия с внутренней поверхностью корпуса; кольцо, установленное на валу ротора; при этом кольцо содержит переднюю поверхность, аксиально обращенную к первому ротору; при этом кольцо содержит тыльную поверхность, аксиально обращенную в сторону, противоположную первому ротору; передний самокомпенсирующийся гидростатический подшипник, выполненный с возможностью взаимодействия с передней поверхностью кольца; при этом передний самокомпенсирующийся гидростатический подшипник содержит: по меньшей мере один канал текучей среды первого ротора, поверхность, ограничивающую карман подшипника вокруг канала текучей среды, по меньшей мере одну площадку вокруг кармана подшипника, причем площадка выступает от кармана подшипника; причем площадка непосредственно примыкает к внутренней поверхности корпуса с образованием гидравлического уплотнения у нее; причем передний самокомпенсирующийся гидростатический подшипник уравновешивает прикладываемое гидростатическим подшипником усилие между наружной поверхностью первого ротора и внутренней поверхностью корпуса.
[00047] В соответствии с одним из вариантов изобретения, ротационная машина дополнительно содержит: задний самокомпенсирующийся гидростатический подшипник, выполненный с возможностью взаимодействия с тыльной поверхностью кольца; причем задний самокомпенсирующийся гидростатический подшипник выполнен с возможностью уравновешивания усилия, прикладываемого вызванным давлением усилием рабочей текучей среды в камере сжатия, частично ограниченной корпусом.
[00048] В соответствии с одним из вариантов изобретения, ротационная машина дополнительно содержит: зубчатую передачу, механически соединяющую первый ротор со вторым ротором; причем кольцо выполнено с возможностью взаимодействия с зубчатой передачей для пошагового перемещения первого ротора ко второму ротору.
Краткое описание чертежей
Аналогичные номера позиций обычно обозначают одни и те же части на всех видах.
Фиг. 1 - вид сбоку одного примера раскрытой машины.
Фиг. 2 - вид сверху в разрезе примера на Фиг. 1 по секущей линии 2-2.
Фиг. 3 - вид в изометрии компонента корпуса и делительной шестерни примера на Фиг. 1.
Фиг. 4 - вид в изометрии примера на Фиг. 1, на котором несколько компонентов корпуса удалены, чтобы проиллюстрировать внутренние компоненты.
Фиг. 5 - вид сверху примера на Фиг. 4.
Фиг. 6 - вид в изометрии примера на Фиг. 1, на котором несколько компонентов удалены, чтобы проиллюстрировать несколько внутренних компонентов.
Фиг. 7 - вид сверху примера на Фиг. 6.
Фиг. 8 - вид спереди нескольких внутренних компонентов примера на Фиг. 1.
Фиг. 8А- вид в разрезе примера на Фиг. 8 по секущей линии 8А-8А.
Фиг. 8В - вид в разрезе по секущей линии 8В-8В на Фиг. 8.
Фиг. 9 - вид сбоку примера на Фиг. 1, на котором несколько компонентов удалены, чтобы проиллюстрировать внутренние компоненты, выполненные с возможностью направления потока рабочей текучей среды и охлаждающей среды, с роторами в первом угловом положении.
Фиг. 10 - вид сверху примера на Фиг. 9.
Фиг. 11 - вид сбоку примера на Фиг. 9 с противоположной стороны.
Фиг. 12 - вид сбоку примера на Фиг. 1, на котором несколько компонентов удалены, чтобы проиллюстрировать внутренние компоненты, выполненные с возможностью направления потока рабочей текучей среды и охлаждающей среды, с роторами во втором угловом положении.
Фиг. 13 - вид сверху примера на Фиг. 12.
Фиг. 14 - вид сбоку примера на Фиг. 12 с противоположной стороны.
Фиг. 15 - вид сбоку примера на Фиг. 1, на котором несколько компонентов удалены, чтобы проиллюстрировать внутренние компоненты, выполненные с возможностью направления потока рабочей текучей среды и охлаждающей среды, с роторами в третьем угловом положении.
Фиг. 16 - вид сверху примера на Фиг. 15.
Фиг. 17 - вид сбоку примера на Фиг. 15 с противоположной стороны.
Фиг. 18 - вид сбоку примера на Фиг. 1, на котором несколько компонентов удалены, чтобы проиллюстрировать внутренние компоненты, выполненные с возможностью направления потока рабочей текучей среды и охлаждающей среды, с роторами в четвертом угловом положении.
Фиг. 19 - вид сверху примера на Фиг. 18.
Фиг. 20 - вид сбоку примера на Фиг. 18 с противоположной стороны.
Фиг. 21 - вертикальная проекция примера на Фиг. 1, на которой несколько компонентов удалены, чтобы проиллюстрировать путь рабочей текучей среды и охлаждающей среды, с роторами в первом угловом положении. Данная фигура иллюстрирует функциональные элементы управления впрыском охлаждающей текучей среды и заслонки, выполненные с возможностью перемещения для перепуска, регулирования производительности и регулирования коэффициента расхода.
Фиг. 22 - вид сверху примера на Фиг. 21.
Фиг. 23 - вертикальная проекция примера на Фиг. 21 с противоположной стороны.
Фиг. 24 - вертикальная проекция примера на Фиг. 1, на которой несколько компонентов удалены, чтобы проиллюстрировать компоненты, выполненные с возможностью направления потока рабочей текучей среды и охлаждающей среды, с роторами в первом угловом положении.
Фиг. 25 - вид сверху примера на Фиг. 24.
Фиг. 26 - вертикальная проекция, взятая с противоположной стороны примера на Фиг. 24.
Фиг. 27 - вертикальная проекция примера на Фиг. 1, на которой несколько компонентов удалены, чтобы проиллюстрировать компоненты, выполненные с возможностью направления потока рабочей текучей среды и охлаждающей среды, с роторами в первом угловом положении.
Фиг. 28 - вид сверху примера на Фиг. 27.
Фиг. 29 - вертикальная проекция, взятая с противоположной стороны примера на Фиг. 27.
Фиг. 30 - вертикальная проекция примера на Фиг. 1, на которой несколько компонентов удалены, чтобы проиллюстрировать компоненты, выполненные с возможностью направления потока рабочей текучей среды и охлаждающей среды, с роторами в первом угловом положении.
Фиг. 31 - вид сверху примера на Фиг. 30.
Фиг. 32 - вертикальная проекция, взятая с противоположной стороны примера на Фиг. 30.
Фиг. 33-вид сверху примера на Фиг. 1, на котором несколько компонентов удалены,.
Фиг. 34 - вид в разрезе по секущей линии 34-34 на Фиг. 33.
Фиг. 35 - вид сбоку примера на Фиг. 1, на котором несколько компонентов удалены, чтобы проиллюстрировать компоненты, выполненные с возможностью направления потока рабочей текучей среды.
Фиг. 36 - вид в разрезе на Фиг. 35 по секущей линии 36-36.
Фиг. 37 изображает в разобранном виде со скрытыми линиями нескольких компонентов примера на Фиг. 1.
Фиг. 38 изображает в разобранном виде со скрытыми линиями нескольких компонентов примера на Фиг. 1.
Фиг. 39 изображает в разобранном виде нескольких внутренних компонентов примера на Фиг. 1.
Фиг. 40 изображает в разобранном и увеличенном виде пример внутренней усеченно-сферической поверхности на Фиг. 39, содержащей полный сферический шар.
Фиг. 41 - другой вид примера на Фиг. 40.
Фиг. 42 изображает в разобранном виде в вертикальном разрезе один пример ротора с частично усеченно-сферической поверхностью в центре радиуса ротора.
Фиг. 43 - вид спереди примера на Фиг. 42.
Фиг. 44 изображает в разобранном виде пример внутренней усеченно-сферической поверхности на Фиг. 43, содержащей регулируемые компоненты.
Фиг. 45 - вид в разрезе по секущей линии 45-45 на Фиг. 44.
Фиг. 46 изображает в разобранном виде другой пример внутренней усеченно-сферической поверхности, содержащей регулируемые компоненты.
Фиг. 47 - вид в разрезе по секущей линии 47-47 на Фиг. 46.
Фиг. 48 - вертикальная проекция примера на Фиг. 46.
Фиг. 49 - вид в разрезе по секущей линии 49-49 на Фиг. 48.
Фиг. 50 изображает в разобранном виде пример вставленного элемента примера ведомого/ведущего ротора на Фиг. 39. Пример на Фиг. 39 по существу цилиндрический (см. Фиг. 2), а пример на Фиг. 50 по существу конический (см Фиг. 52).
Фиг. 51 - вид спереди примера на Фиг. 50.
Фиг. 52 - вид в разрезе по секущей линии 52-52 на Фиг. 51.
Фиг. 53 изображает в разобранном виде пример вставки ведомого ротора или вставки ведущего ротора на Фиг. 39, включающий в себя сегмент многогранной наружной поверхности.
Фиг. 54 - вид спереди примера на Фиг. 53.
Фиг. 55 - вид в разрезе по секущей линии 55-55 на Фиг. 54.
Фиг. 56 - вид сзади примера на Фиг. 1.
Фиг. 57 - вид сбоку примера на Фиг. 1 с противоположной стороны.
Фиг. 58 - вид спереди примера на Фиг. 1.
Фиг. 59А - вид в разрезе по секущей линии 59А-59А на Фиг. 58.
Фиг. 59В - вид в разрезе по секущей линии 59В-59В на Фиг. 58
Фиг. 59С - вид в разрезе по секущей линии 59В-59В на Фиг. 58.
Фиг. 59D - вид в разрезе по секущей линии 59D-59D на Фиг. 58.
Фиг. 60А - вид в разрезе по секущей линии 60А-60А на Фиг. 56.
Фиг. 60В - вид в разрезе по секущей линии 60В-60В на Фиг. 56
Фиг. 60С - вид в разрезе по секущей линии 60С-60С на Фиг. 56.
Фиг. 61 - вид сбоку/со скрытыми линиями нескольких внутренних компонентов примера на Фиг. 1.
Фиг. 62 - вид в разрезе со скрытыми линиями по секущей линии 62-62 на Фиг. 61.
Фиг. 63 - вид в разрезе со скрытыми линиями по секущей линии 63-63 на Фиг. 61.
Фиг. 64 - вид спереди/со скрытыми линиями компонентов на Фиг. 61.
Фиг. 65 - вид в разрезе по секущей линии 65-65 на Фиг. 64.
Фиг. 66 - вид сбоку одного из компонентов на Фиг. 65.
Фиг. 67 - вид в разрезе по секущей линии 67-67 на Фиг. 66.
Фиг. 68 - вид сбоку другого примера компонента на Фиг. 66, снятого с ротора.
Фиг. 69 - вид в разрезе по секущей линии 69-69 на Фиг. 68.
Фиг. 70А - вид сверху, с высокой степенью схематичности изображающий один пример внутренних компонентов примера на Фиг. 1, в том числе делительной зубчатой передачи, применимой к валам ведомого/ведущего роторов с разными частотами вращения, а также могущего быть желательным для ведомого/ведущего роторов с разным количеством лопастей.
Фиг. 70В - вид сверху, с высокой степенью схематичности изображающий один пример другой делительной зубчатой передачи.
Фиг. 70С - вид сверху, с высокой степенью схематичности изображающий другой пример делительной зубчатой передачи.
Фиг. 71А - вид в изометрии одного примера нового подшипника с противоположными карманами подшипника.
Фиг. 71В - вид в изометрии другого примера нового подшипника с противоположными карманами подшипника.
Фиг. 71С - вид со скрытыми линиями/сверху верхней части примера на Фиг. 71А, на котором изображен дополнительный компонент.
Фиг. 71D - вид в разрезе по секущей линии 71D-71D на Фиг. 71С.
Фиг. 72А - вид в изометрии одного примера раскрытого нового подшипника без противоположного кармана(-ов) подшипника.
Фиг. 72В - вид в изометрии другого примера раскрытого нового подшипника без противоположного кармана(-ов) подшипника.
Фиг. 73 изображает в разобранном виде со скрытыми линиями примера гибридных опорных подшипников, выполненных с возможностью восприятия радиальных нагрузок, на Фиг. 1.
Фиг. 74 - вид сбоку со скрытыми линиями компонентов на Фиг. 73.
Фиг. 75 - вид в разрезе со скрытыми линиями по секущей линии 75-75 на Фиг. 74.
Фиг. 76 - вид спереди со скрытыми линиями одного из компонентов на Фиг. 73.
Фиг. 77 - вид сбоку/со скрытыми линиями компонентов на Фиг. 76.
Фиг. 78 изображает в разобранном виде/со скрытыми линиями один пример комбинированных опорно-упорных гибридных подшипников на Фиг. 1.
Фиг. 79 - вид сбоку со скрытыми линиями компонентов на Фиг. 78.
Фиг. 80 - вид в разрезе по секущей линии 80-80 на Фиг. 79.
Фиг. 81 - вид спереди одного из компонентов на Фиг. 78.
Фиг. 82 - вид сбоку компонента на Фиг. 81.
Фиг. 83 изображает в разобранном виде один пример заднего или переднего цилиндра с Фиг. 1 с комбинированными опорно-упорными гибридными подшипниками, выполненными с возможностью восприятия радиальных нагрузок, аксиальных нагрузок и нагрузок от изгибающего момента.
Фиг. 84 изображает в разобранном виде/в изометрии один пример заднего или переднего цилиндра из примера на Фиг. 1 с комбинированными опорно-упорными гибридными подшипниками, выполненными с возможностью восприятия радиальных нагрузок, аксиальных нагрузок и нагрузок от изгибающего момента.
Фиг. 85 изображает в разобранном виде нескольких компонентов на Фиг. 83.
Фиг. 86 - вид со скрытыми линиями нескольких компонентов на Фиг. 83.
Фиг. 87 - вид в разрезе по секущей линии 87-87 на Фиг. 86.
Фиг. 88 - вид спереди компонентов на Фиг. 86.
Фиг. 89 - вид в разрезе по секущей линии 89-89 на Фиг. 88.
Фиг. 90 - вид в разрезе по секущей линии 90-90 на Фиг. 88.
Фиг. 91 - вид в разрезе по секущей линии 91-91 на Фиг. 88.
Фиг. 92 - вид в разрезе по секущей линии 92-92 на Фиг. 88.
Фиг. 93 - вид спереди/со скрытыми линиями трех компонентов на Фиг. 85.
Фиг. 94 - вид спереди в одном примере некоторых из компонентов на Фиг. 8А-8В.
Фиг. 95 - вид в разрезе по секущей линии 95-95 на Фиг. 94.
Фиг. 96 - увеличенный вид области 96 на Фиг. 95.
Фиг. 97 - вид в изометрии одного из компонентов на Фиг. 95.
Фиг. 98 - вид спереди одного примера некоторых компонентов на Фиг. 8А-8В.
Фиг. 99 - вид в разрезе по секущей линии 99-99 на Фиг. 98.
Фиг. 100 - увеличенный вид области 100 на Фиг. 99.
Фиг. 101 - вид в изометрии одного из компонентов на Фиг. 99.
Фиг. 102 - вид сбоку другого примера раскрытой ротационной машины.
Фиг. 103 - вид в разрезе примера на Фиг. 102 по секущей линии 103-103.
Фиг. 103А - увеличенный вид области 103А на Фиг. 103.
Фиг. 103В - увеличенный вид области 103В на Фиг. 103.
Фиг. 103С - увеличенный вид области 103С на Фиг. 103.
Фиг. 103D - увеличенный вид области 103D на Фиг. 103.
Фиг. 103Е - увеличенный вид области 103Е на Фиг. 103.
Фиг. 104А изображает сверху в разобранном виде пример на Фиг. 102.
Фиг. 104В - вид сверху некоторых компонентов на Фиг. 102.
Фиг. 105 - вид сзади сверху примера на Фиг. 102 перпендикулярно впускному патрубку.
Фиг. 106 - вид сверху примера на Фиг. 102.
Фиг. 107 - вид в разрезе примера на Фиг. 106 по секущей линии 107-107.
Фиг. 108А - вид в разрезе примера на Фиг. 106 по секущей линии 108А-108А с компонентами, выполненными с возможностью обеспечения высокой объемной производительности.
Фиг. 108В - вид в разрезе примера на Фиг. 106 по секущей линии 108В-108В с компонентами, выполненными с возможностью обеспечения уменьшенной объемной производительности и/или полного перепуска.
Фиг. 109 - вид в разрезе примера на Фиг. 106 по секущей линии 109-109.
Фиг. 110 - вид в разрезе примера на Фиг. 106 по секущей линии 110-110.
Фиг. 111 - вид в разрезе примера на Фиг. 106 по секущей линии 111-111.
Фиг. 112 - вид в разрезе примера на Фиг. 106 по секущей линии 112-112.
Фиг. 113 изображает сверху в разобранном виде нескольких компонентов на Фиг. 102.
Фиг. 114 - вид в изометрии нескольких компонентов на Фиг. 113.
Фиг. 115 изображает в изометрии/в разобранном виде нескольких компонентов на Фиг. 113.
Фиг. 116 - вид в изометрии компонента форсунки текучей среды на Фиг. 115.
Фиг. 117 - вид в изометрии примера инструмента, используемого на одном этапе для снятия компонента форсунки текучей среды на Фиг. 116.
Фиг. 118 - вид в изометрии инструмента на Фиг. 117, вставленного в компонент форсунки текучей среды на Фиг. 116
Фиг. 118А - вид сбоку некоторых компонентов на Фиг. 102, в том числе инструмента для снятия форсунки текучей среды на Фиг. 117.
Фиг. 118В - вид в разрезе примера на Фиг. 118А.
Фиг. 118С - увеличенный вид области 118С на Фиг. 118В.
Фиг. 119 - вид сбоку примера на Фиг. 102, на котором несколько компонентов удалены, чтобы проиллюстрировать внутренние компоненты, выполненные с возможностью направления потока рабочей текучей среды, с роторами в первом угловом положении.
Фиг. 120 - вид сверху примера на Фиг. 119.
Фиг. 121 - вид сбоку с противоположной стороны на Фиг. 119.
Фиг. 122 - вид сбоку примера на Фиг. 102, на котором несколько компонентов удалены, чтобы проиллюстрировать внутренние компоненты, выполненные с возможностью направления потока рабочей текучей среды, с роторами во втором угловом положении.
Фиг. 123 - вид сверху примера на Фиг. 122.
Фиг. 124 - вид сбоку с противоположной стороны на Фиг. 122.
Фиг. 125 - вид сбоку примера на Фиг. 102, на котором несколько компонентов удалены, чтобы проиллюстрировать внутренние компоненты, выполненные с возможностью направления потока рабочей текучей среды, с роторами в третьем угловом положении.
Фиг. 126 - вид сверху примера на Фиг. 125.
Фиг. 127 - вид сбоку с противоположной стороны на Фиг. 125.
Фиг. 128 - вид сбоку примера на Фиг. 102, на котором несколько компонентов удалены, чтобы проиллюстрировать внутренние компоненты, выполненные с возможностью направления потока рабочей текучей среды, с роторами в четвертом угловом положении.
Фиг. 129 - вид сверху примера на Фиг. 128.
Фиг. 130 - вид сбоку с противоположной стороны на Фиг. 128.
Фиг. 131 - вид в разрезе примера на Фиг. 119 по секущей линии 131-131.
Фиг. 132 - вид в разрезе примера на Фиг. 122 по секущей линии 132-132.
Фиг. 133 - вид в разрезе примера на Фиг. 125 по секущей линии 131-131.
Фиг. 134 - вид в разрезе примера на Фиг. 128 по секущей линии 128-128.
Фиг. 135 - вид в разрезе примера на Фиг. 119 по секущей линии 135-135.
Фиг. 136 - вид в изометрии компонентов на Фиг. 114, выполненных с возможностью направления потока рабочей текучей среды.
Фиг. 137 - вид сбоку примера на Фиг. 102, на котором несколько компонентов удалены, чтобы проиллюстрировать поток охлаждающей среды и примеры «Е», «F» и «G» гибридных подшипников.
Фиг. 138 - вид сбоку/со скрытыми линиями компонентов на Фиг. 137.
Фиг. 139 - вид в изометрии примера на Фиг. 137, на котором компоненты показаны сзади.
Фиг. 140 - вид в изометрии/со скрытыми линиями компонентов на Фиг. 139.
Фиг. 141 - вид в изометрии примера на Фиг. 137, на котором компоненты показаны спереди.
Фиг. 142 - вид в изометрии/со скрытыми линиями компонентов на Фиг. 141.
Фиг. 143 - вид сбоку примера на Фиг. 102, на котором несколько компонентов удалены, чтобы проиллюстрировать поток охлаждающей среды и примеры «Н», «I» и «J» гибридных подшипников.
Фиг. 144 - вид сбоку/со скрытыми линиями компонентов на Фиг. 143.
Фиг. 145 - вид в изометрии примера на Фиг. 143, на котором компоненты показаны сзади.
Фиг. 146 - вид в изометрии/со скрытыми линиями компонентов на Фиг. 145.
Фиг. 147 - вид в изометрии примера на Фиг. 143, на котором компоненты показаны спереди.
Фиг. 148 - вид в изометрии/со скрытыми линиями компонентов на Фиг. 147.
Фиг. 149 - вид в изометрии другого примера раскрытого нового подшипника без противоположного кармана(-ов) подшипника.
Фиг. 150 - вид сбоку другого примера раскрытой ротационной машины.
Фиг. 151 - вид в разрезе примера на Фиг. 150 по секущей линии 151-151.
Фиг. 152 - вид сбоку примера на Фиг. 150, на котором несколько компонентов удалены, чтобы проиллюстрировать поток охлаждающей среды и примеры гибридных подшипников.
Фиг. 153 - вид сбоку/со скрытыми линиями компонентов на Фиг. 152.
Фиг. 154 - вид в изометрии примера на Фиг. 152, на котором компоненты показаны сзади.
Фиг. 155 - вид в изометрии/со скрытыми линиями компонентов на Фиг. 154.
Фиг. 156 - вид в изометрии примера на Фиг. 152, на котором компоненты показаны спереди.
Фиг. 157 - вид в изометрии/со скрытыми линиями компонентов на Фиг. 156.
Фиг. 158 - вид сбоку примера на Фиг. 150, на котором несколько компонентов удалены, чтобы проиллюстрировать поток охлаждающей среды и примеры гибридных подшипников.
Фиг. 159 - вид сбоку/со скрытыми линиями компонентов на Фиг. 158.
Фиг. 160 - вид в изометрии примера на Фиг. 158, на котором компонентыпоказаны сзади.
Фиг. 161 - вид в изометрии/со скрытыми линиями компонентов на Фиг. 160.
Фиг. 162 - вид в изометрии примера на Фиг. 158, на котором компоненты показаны спереди.
Фиг. 163 - вид в изометрии/со скрытыми линиями компонентов на Фиг. 162.
Осуществление изобретения
[00049] Настоящее раскрытие включает в себя несколько примеров ротационных машин объемного вытеснения с высокой удельной мощностью на единицу массы, широким рабочим диапазоном и низкими затратами на производство. В одном примере машина представляет собой пример компрессора.
[00050] В некоторых случаях, чтобы облегчить раскрытие и сократить объем текста, конкретные примеры компонента имеют буквенный индекс, обозначающий конкретный пример более общего примера. Например, лопасти ротора имеют общее обозначение 78, причем конкретные лопасти 78 ведомого ротора 28 обозначены 78А, конкретные лопасти ведущего ротора 76 обозначены 78В. В некоторых примерах конкретное обозначение указано на чертеже, а общее обозначение используется в описании для указания конкретного примера и его эквивалентов.
[00051] Из уровня техники известны многие типы конструкций компрессоров. В число конструкций компрессоров входят: компрессоры объемного вытеснения, динамические и герметичные, открытые или полугерметичные компрессоры. Компрессоры объемного вытеснения обычно являются поршневыми или ротационными винтовыми, однако в число других примеров могут входить компрессоры с ионно-жидкостным поршнем, ротационные пластинчатые компрессоры, компрессоры с катящимся поршнем, спиральные или мембранные компрессоры.
[00052] Несколько раскрытых в настоящем документе ротационных машин/компрессоров 20 являются ротационными лопастными устройства объемного вытеснения. Ротационные лопастные устройства объемного вытеснения образованы двумя вращающимися роторами. В одном примере оси вращения роторов смещены относительно прямой и могут пересекаться. Каждый вращающийся ротор выполнен с гранью, содержащей лопасти и впадины. Лопасти и впадины одного ротора входят во взаимное зацепление с впадинами и лопастями противоположного ротора и взаимодействуют друг с другом и с ближайшими внутренними усеченно-сферическими поверхностями корпуса 55А/55В (Фиг. 1/Фиг. 102) с образованием камер, объем которых изменяется при вращении пары роторов. В одном примере пересечение осей вращения роторов находится в центре 77 усеченно-сферических поверхностей 114 корпуса 55А.
[00053] В одном примере раскрыт компрессор, содержащий два вращающихся ротора 28/76 в пределах корпуса 55А. В одном примере такого компрессора, первый ротор 76 (ведущий) соединен с валом 64 отбора мощности, а второй ротор (ведомый) 28 приводят во вращение посредством зубчатой передачи, соединенной с приводным валом 64, или под действием усилий, прилагаемых через грани 84В/84А ротора (Фиг. 39). В одном примере, как видно из Фиг. 1, 2, корпус 55А содержит основание 58 и крышку 56, при этом и то, и другое выполнено с расточками с непараллельными пересекающимися осями 637 и 639, как видно из Фиг. 2. Корпус 55А содержит усеченно-сферическую обращенную внутрь поверхность 114, примыкающую к проходящим радиально наружным поверхностям 36/62 роторов 28/76. В одном примере каждый ротор 28/76 установлен на валах 64/40 или выполнен за одно целое с ними, при этом концы валов в одном примере расположены в полости (усеченно-сферические поверхности корпуса), при этом ось ведущего ротора и ось вращения ведомого ротора в одном примере расположены под углом друг к другу, при этом центр 77 усеченно-сферических поверхностей 36, 62 обоих роторов 28/76 является центром усеченно-сферической поверхности 114, образующей полость 114'. Ведущий ротор и ведомый ротор входят во взаимное зацепление на противоположных гранях (лопастях и впадинах) с образованием камер, радиально примыкающих к указанному общему центру. В примере на Фиг. 6-8А лопасти 78 и впадины 82 сформированы по «эвольвентам». В патенте США 9,316,102, включенном в настоящий документ посредством отсылки, подробно раскрыто то, как можно формировать роторы по эвольвентам. Другие пример лопастей и впадин ротора раскрыты в патенте США 6,705,161. Конфигурация каналов для впуска и выпуска в одном примере в целом обусловлена положением камер относительно корпуса. В данном примере раскрыт только один впускной канал и только один выпускной канал. Можно добавить дополнительный впускной канал, например, для регулирования производительности.
[00054] Выражение «текучая среда» в настоящем документе служит для обозначения вещества, например, жидкости, газа или их комбинации/смеси, способной к течению и изменению своей формы с постоянной скоростью под действием силы, стремящейся изменить ее форму.
Определение термина «гибридный подшипник»
[00055] Термин «гибридный подшипник» в настоящем документе служит для обозначения гидростатического подшипника раскрытой в настоящем документе особой конструкции. Раскрыто несколько примеров, выполненных с возможностью увеличения стойкости к смещению и/или отклонению из-за «гидродинамического эффекта». «Гибридный» в данном случае служит для описания гидростатического подшипника, в некоторых примерах выполненного с дополнительной стойкостью к смещению и/или отклонению из-за «гидродинамического эффекта». Термин «гибридный подшипник» обозначает подшипник, содержащий площадку, карман подшипника и устройство подачи текучей среды под давлением в карман подшипника, причем подшипник может необязательно содержать множество карманов подшипника. Вращение компонента относительно неподвижного компонента приводит к относительному перемещению поверхности со значительной скоростью между противоположными стенками зазора подшипника. При наличии достаточного количества текучей среды подшипника между противоположными стенками зазора подшипника, под действием скорости движения поверхности относительно неподвижной поверхности происходит «перекачка» текучей среды подшипника между этими двумя поверхностями. По мере сжатия движущейся пленки текучей среды подшипника между этими двумя поверхностями, происходит изменение местного давления текучей среды в зависимости от изменений высоты зазора. Это явление известно как «гидродинамический эффект». Чем меньше зазор подшипника между этими двумя поверхностями, тем выше местное давление текучей среды. И наоборот, чем больше зазор подшипника между этими двумя поверхностями, тем ниже местное давление текучей среды. Если под действием нагрузки происходит уменьшение зазора, сила реакции, вызываемой «гидродинамическим эффектом», может быть по существу противоположна по направлению исходной нагрузке. Чем меньше зазор, тем больше может быть сила реакции. Раскрытый здесь гибридный подшипник в одном примере выполнен с возможностью отсутствия соприкосновения между компонентами. Таким образом, гидродинамический эффект, возникающий между двумя по существу концентрическими или параллельными поверхностями с существенной относительной скоростью, может быть «самокомпенсирующимся» в том смысле, что может по существу не происходить изменение относительного положения компонентов в направлении прилагаемых нагрузок, где в ином случае возникло бы соприкосновение. Эта компенсация возможна без применения способов внешнего регулирования. Гидродинамический эффект может быть по существу нулевым при низких скоростях относительного перемещения поверхностей, при этом для гидростатического вклада может не быть нужна скорость относительного перемещения поверхностей между противоположными стенками зазора подшипника.
[00056] Определение «гибридный» обусловлено тем, что подшипник приобретает способность воспринимать нагрузки от гидростатического давления. Будучи соединены с вращающимся валом, гибридные подшипники могут приобрести способность воспринимать нагрузку от гидродинамического эффекта между вращающимся валом и примыкающим компонентом. В процессе работы в зазоре между компонентами происходит образование «клина» высоконапорной текучей среды, позволяющего избежать соприкосновения. При очень низких частотах вращения данный эффект может не давать практически никакого преимущества. В основе действия некоторых подшипников (например, подшипников скольжения) лежит исключительно гидродинамический эффект.
[00057] Поскольку непосредственное соприкосновение между компонентами гибридного подшипника не предусмотрено, можно ожидать, что износ и/или техобслуживание будут незначительными или полностью отсутствовать. Напротив, в основе работы обычных роликовых подшипников лежит непосредственное соприкосновение металлов, в связи с чем срок их службы может быть ограниченным. В одном примере высоты зазоров между компонентами в гибридном подшипнике могут составлять тысячную долю дюйма или менее, что может быть меньше перемещения, ожидаемого в обычных роликовых подшипниках. Данная возможность иметь большую жесткость, чем обычные роликовые подшипники, обеспечивает гибридным подшипникам преимущество, в частности - в таких высокоточных устройствах, как станки с числовым программным управлением (ЧПУ), для минимизации деформации инструмента. В одном примере текучая среда подшипника может представлять собой воду. В другом примере текучая среда подшипника может представлять собой текучую среду с более высокой вязкостью, например, масло. Способность гибридных подшипников воспринимать нагрузки можно увеличить путем повышения давления подачи (например, от насоса) к гибридным подшипникам. Данное преимущество может отличать их от обычных роликовых подшипников, могущих обладать в целом более низкой способностью воспринимать нагрузки. Кроме того, у обычных роликовых подшипников возможно уменьшение данной способности воспринимать нагрузки и/или срока службы при более высоких рабочих частотах вращения, тогда как у гибридного подшипника возможно возрастание способности воспринимать нагрузки при более высоких рабочих скоростях вращения, если его преимущества обусловлены гидродинамическим эффектом.
Самокомпенсирующиеся сферические гибридные подшипники с капиллярным отверстием
[00058] Из примеров на Фиг. 5-8А и Фиг. 56-69 видно, что гидростатический подшипник 134/136 с капиллярным питанием (Фиг. 5) выполнен с возможностью принудительного пропускания высоконапорной текучей среды чрез длинное тонкое отверстие (капиллярное отверстие) 340 (Фиг. 65), в (углубленный) карман 208А подшипника. Периметр кармана подшипника именуется «площадка» 206А, 206АВ, 206AL, а взаимосвязь кармана и площадки будет подробно раскрыта ниже. В данном примере высоконапорная текучая среда 600 может поступать в ротационную машину 20 через отверстие 210 корпуса (Фиг. 60С) в корпусе 44 заднего подшипника ведомого ротора. Отверстие 210 корпуса связано по текучей среде с канавкой 211 вала, сформированной вокруг вала в корпусе или, в альтернативном варианте, в вале. Отверстие 210 корпуса также связано по текучей среде с поверхностями, ограничивающими отверстия 212 (Фиг. 61) в вале 40 ведомого ротора. Аналогичным образом, в одном примере высоконапорная текучая среда может поступать в компрессор 20 через поверхности, ограничивающие отверстие 214 корпуса (Фиг. 59С) в корпусе 70 заднего подшипника вала ведущего ротора, связанном по текучей среде с канавкой 215 и отверстиями 216 (Фиг. 590) в вале 64 ведущего ротора. В обоих случаях текучая среда далее может проходить по существу радиально наружу через длинное тонкое отверстие (капиллярное отверстие) 340А (Фиг. 64) в углубленный карман 208А подшипника с последующим прохождением за периметр карманов подшипника у площадок 206А, 206АВ, 206AL. Если поверхности, ограничивающие отверстия 340, обеспечивают соответствующее ограничение потока текучей среды, отверстия 340 служат в качестве «капиллярных отверстий». В некоторых примерах диаметр отверстия 340 может быть меньше миллиметра. Длина отверстия 340 в одном примере по существу в 100 раз больше диаметра. В раскрытом примере может быть прикреплен съемный компонент (ограничитель) или штифт 348, загораживающий некоторую часть проходного сечения отверстий 340. На Фиг. 66-69 показано, что указанный компонент может представлять собой штифт 348/утопленный винт, закрепленный на месте и содержащий одно или более длинных тонких отверстий 340. Термин «утопленный винт» обозначает тип винта, обычно применяемого без гайки. Утопленные винты обычно не имеют головок (и также именуются «винт-заглушка»), что означает то, что винт выполнен с резьбой по всей длине, но без головки, выступающей за наружный диаметр резьбы винта. Канавка 352 в поверхности, ограничивающей отверстия 108, может содержать стопорное кольцо 107 для предотвращения ослабления штифта 348 или утопленного винта (не показан) или его выхода из отверстий 108 без удаления стопорного кольца 107. Канавка 354А/354В может также содержать уплотнительное кольцо 355 для минимизации утечки вокруг корпуса 348А/348В ограничителя. В одном примере тонкая трубка 344 может быть припаяна мягким припоем, твердым припоем, посажена с натягом или иным образом прикреплена к внутреннему отверстию 346 ограничителя (штифта) 348А. Внутренние поверхности тонкой трубки 344 могут ограничивать длинное тонкое отверстие (капиллярное отверстие) 340. Отличия диаметров некоторых отверстий 340 от других могут в некоторых случаях применения ухудшить эксплуатационные показатели подшипника 134/136 путем уменьшения его способности воспринимать нагрузку и/или увеличения потребностей в перекачке. Засорение одного или более капиллярных отверстий 340 подшипника может существенно повлиять на способность подшипника воспринимать нагрузку. Поэтому один пример содержит тонкую трубку 344, функционирующую как капиллярное отверстие и содержащую съемный компонент, как показано на Фиг. 65-67. В одном примере в качестве тонкой трубки 344 применена игла для подкожных инъекций, так как различия по внутреннему диаметру и длине игл для подкожных инъекций одной партии могут быть незначительны. Различия по высоте зазора у площадок 206 можно компенсировать путем применения трубки 344 другого размера (т.е. диаметра и/или длины).
[00059] Пример на Фиг. 68-69 схож с примером на Фиг. 66, 67, но не содержит съемную трубку 344. Канавка 354В штифта 348В в одном примере взаимодействует с уплотнительным кольцом 355 для минимизации утечки вокруг ограничителя 348В. Внутренние поверхности ограничителя 348В в одном примере содержат капиллярное отверстие 340В. Любой из съемных ограничителей 348А/348В может быть выполнен с резьбами 358А/358В, что позволяет удалять ограничители (штифты) 348А/348В с помощью способов и инструментов, известных специалистам в данной области техники. Одним из таких инструментов для снятия штифтов является ударный съемник с резьбой на конце штыря для вхождения в зацепление с резьбами штифта, после чего ударный съемник используют для снятия штифта с применением силы. Или же вместо штифтов можно использовать винт, например, утопленные винты, однако их вставка и удаление могут занимать больше времени.
[00060] Следует понимать, что обычно в непосредственной близости от площадок 206 подшипника имеется поверхность. Между площадками подшипника и противоположной поверхностью может быть зазор. Межстенное пространство - «зазор» - между площадкой 206 подшипника и противоположной поверхностью далее по тексту именуется «высота зазора» у площадки 206. Высота зазора в одном примере может составлять несколько тысячных дюйма или менее. Например, на Фиг. 2-5 внутренняя поверхность 114 усеченно-сферического корпуса изображена по существу вблизи площадок усеченно-сферических подшипников 134/136. Площадки 206 могут быть расположены вблизи поверхности примыкающего компонента для минимизации утечек текучей среды из кармана 208 за площадку 206 с одновременной максимизацией жесткости (прочности при сжатии) карманов подшипника. Поток текучей среды в карман 208 можно регулировать путем ограничения потока через одно или более длинных тонких отверстий 340 (капиллярных отверстий). Такое уменьшение потока текучей среды может стать причиной перепада давления на сужении(-ях). Если карман подшипника углублен относительно площадок, давление текучей среды в кармане подшипника может быть по существу равномерным или на площадках может иметь место существенный градиент давлений. Во время работы, когда к валу прикладывают усилие, происходит уменьшение зазора подшипника в области приложения усилия и увеличение зазора на диаметрально противоположной стороне. По мере уменьшения зазора у площадок кармана подшипника, возрастает сопротивление текучей среды из нагруженного кармана подшипника, в результате чего возрастает давление на нагруженном кармане и соответственно падает давление на по существу диаметрально противоположном кармане(-ах).Возникшее более высокое давление в кармане подшипника увеличивает усилие, направленное на раздвижение компонентов, до тех пор, пока нагрузка и разность давлений между указанными двумя карманами не будут уравновешены. Так подшипник компенсирует приложенную нагрузку (усилие).
[00061] Как видно из примера на Фиг. 61-65, множество карманов 208 подшипника расположены на наружной усеченно-сферической поверхности 36 ведомого ротора 28. Несмотря на то, что ряд примеров содержат несколько карманов 208 на каждой лопасти 78, в одном примере на каждой лопасти 78 может быть выполнено меньшее число (вплоть до одного) кармана 208 подшипника. При этом в таком примере способность воспринимать нагрузки («несущая способность») может быть по существу меньше, так как площадки подшипника, окружающие карман, могут быть по существу удалены друг от друга по окружности или в продольном направлении. Несущая способность подшипника в одном примере по существу зависит от продукта на поверхности проекции, оказывающего сопротивление смещению и максимальным давлениям, возможным в кармане подшипника или множестве карманов 208 подшипника, в месте подшипника с минимальными высотами зазоров (т.е. там, где в ином случае возникло бы соприкосновение). Давление в каждом кармане 208 подшипника может достигать максимума, когда высоты зазоров у окружающих площадок имеют минимальное значение, при котором расход потока текучей среды из кармана подшипника может быть по существу уменьшен. Давление в каждом кармане подшипника можно рассчитать аналогичному тому, как рассчитывают напряжение для принципиальной электросхемы. Электрическое сопротивление, напряжение и ток принимают в качестве аналогов сопротивлению потока, давлению и расходу соответственно. Эквивалентное гидравлическое сопротивление потока, выходящего из кармана подшипника, в одном примере может превышать гидравлическое сопротивление потока, поступающего в карман подшипника, для максимизации давления в каждом кармане. Гидравлическое сопротивление у отдельно взятой площадки 206 может по существу зависеть от высоты зазора у данной площадки. Эквивалентное гидравлическое сопротивление всех площадок, окружающих карман подшипника, можно рассчитать как сопротивление множества параллельных потоков. Тому, кто знаком с расчетами эквивалентных электрических схем, будет понятно, что если бы две площадки были расположены одна за другой с одной из сторон кармана подшипника, то рассчитывали бы эквивалентное последовательное гидравлическое сопротивление этих двух площадок, после чего эквивалентное сопротивление рассчитывали бы как гидравлическое сопротивление, параллельное другим параллельным сопротивлениям потока. Максимальную несущую способность подшипника в каждом направлении можно определить как максимальное смещение в указанном направлении под действием приложенной нагрузки до тех пор, пока не возникнет соприкосновение. Таким образом, если одна или более высот зазоров у площадок, окружающих карман, все еще по существу большая в положении, близком к соприкосновению, то суммарное эквивалентное гидравлическое сопротивление указанных площадок может не быть по существу больше гидравлического сопротивления потока через капиллярное отверстие. Это позволяет по существу снизить максимальное давление, возможное в каждом кармане подшипника. Раскрытый выше способ расчета может учитывать только вклад потока, вызванного гидростатическими явлениями/давлением («пуазейлевское течение»), при этом гидродинамический эффект может дополнительно увеличить несущую способность.
[00062] Вид в поперечном разрезе на Фиг. 65 изображает пример, в котором площадки 206А, 206АВ, 206ВС, 206CD и 206D имеют усеченно-сферическую топологию поверхности с центрами сферы, по существу идентичными центру 77 сферы роторов и центру сферы усеченно-сферической полости, например, поверхности 114, ограничивающей полость 114' на Фиг. 2-3. Если высоты зазоров (расстояние между площадкой и примыкающей поверхностью) в местах расположения этих площадок изначально эквивалентны, то смещение ротора на Фиг. 65 относительно поверхности усеченно-сферической полости 114' может уменьшить высоту зазора у площадки 206D больше, чем высоту зазора у площадки 206А. Возникающие в результате высоты зазоров можно рассчитать, используя тригонометрические зависимости и/или «скалярное произведение». Когда высота зазора у площадки 206D близка к нулю, высота зазора у площадки 206А все еще может составлять существенную долю высоты зазора до приложения нагрузки. Гидравлическое сопротивление у площадки 206D в этом положении может быть по существу выше гидравлического сопротивления у площадки 206А. Таким образом, если один карман подшипника содержит по существу удаленные площадки в положениях 206А и 206D, несущая способность может быть по существу ниже, чем в конфигурации с карманами 208А, 208В, 208С, 208D подшипника в том же продольном интервале. Аналогичным образом можно объяснить общую взаимосвязь между несущей способностью и протяженностью подшипника по окружности. В данном и в других описаниях конкретных площадок, карманов и т.п. речь идет об одном роторе (т.е. роторе 28).
[00063] Известны радиальные гидростатические подшипники, чья конфигурация отлична от представленных, выполненные с капиллярными отверстиями для подачи текучей среды на по существу цилиндрическую поверхность подшипника. Такой гидростатический подшипник может быть способен воспринимать радиальные нагрузки. В одном примере, также известны упорные гидростатические подшипники, выполненные с возможностью подачи текучей среды на по существу кольцевую планарную поверхность посредством капиллярных отверстий. Считают, что такой гидростатический подшипник может быть выполнен с возможностью восприятия аксиальных нагрузок. При наличии множества карманов подшипника, такой гидростатический подшипник может быть также способен воспринимать изгибные нагрузки. Изгибные нагрузки создают затруднения из-за своей способности изгибать вал.
Фиг. 66-69 изображают примеры ограничителей, которые могли бы содержать соответствующее капиллярное отверстие. Эти ограничители применимы для радиальных или упорных вариантов гидростатических подшипников. В одном примере такие ограничители можно применять в радиальных гибридных подшипниках 72/138 вала ведущего/ведомого ротора (Фиг. 2-8В) для создания самокомпенсирующихся гибридных подшипников с капиллярным питанием, могущих воспринимать радиальные нагрузки. В одном примере такие ограничители можно применять в передних/задних цилиндрических гибридных подшипниках 118/120 (Фиг. 2-8В) для создания самокомпенсирующихся гибридных подшипников с капиллярным питанием, могущих воспринимать аксиальные нагрузки и изгибные нагрузки, оказывающие изгибающее воздействие на вал.
Подача текучей среды в самокомпенсирующиеся подшипники с капиллярным питанием
[00064] Как раскрыто выше, пример на Фиг. 61-65 иллюстрирует то, как высоконапорную текучую среду можно направлять через один пример вращающегося вала 40 ведомого ротора для питания сферических подшипников. В данном примере в месте расположения сферических подшипников 134/136 (Фиг. 2-5) вращающийся компонент может не быть сплошным по окружности. Поэтому в некоторых случаях применения, если карманы подшипника размещены на неподвижном компоненте, скорости утечки могут быть по существу высокими, когда впадины 82 (Фиг. 5) ротора проходят тот или иной карман подшипника. В одном примере для ротора с усеченно-сферической наружной геометрией при наличии четного числа лопастей 78 можно применить гибридный подшипник с противоположными карманами подшипника на Фиг. 71А-71В и Фиг. 73-93, могущий содержать карманы на диаметрально-противоположных сторонах. При этом в примере с нечетным числом лопастей величина площади поверхности подшипника в направлении наивысшей ожидаемой нагрузки давления может быть по существу больше. Это может быть важным фактором, который необходимо учесть при проектировании асимметричной структуры подшипника, так как способность воспринимать нагрузки может по существу зависеть от направления нагрузок наибольшей величины. Термин «структура» означает регулярный порядок или схему расположения множества аналогичных компонентов.
[00065] Фиг. 2-8В и Фиг. 56-60С иллюстрируют пример, в котором высоконапорная текучая среда может поступать в компрессор для подачи в гибридные подшипники 136/134 ведомого/ведущего роторов и передние/задние цилиндрические гибридные подшипники 118/120 для ведомого/ведущего роторов. Ведомый/ведущий роторы в некоторых примерах синонимично именуются «первый/второй роторы». Выражения «первый ротор» и «второй ротор» в некоторых примерах также синонимично обозначают пары роторов, представляющие собой пары «ведомый/ведомый», «ведущий/ведущий» и их комбинации. Питающая линия (канал) 218 (Фиг. 60А) в основании 58 корпуса связана по текучей среде с питающими линиями 220/221 (Фиг. 2/60В) в корпусе 34 переднего подшипника ведомого ротора. Питающие линии 218/220/221 выполнены с возможностью подачи текучей среды в передние цилиндрические гибридные подшипники 118 ведомого ротора и радиальные гибридные подшипники 138 ведомого ротора. Подшипники 118/138 выполнены с возможностью восприятия соответственно аксиальных и радиальных/изгибных нагрузок на ведомый ротор 28. Аналогичным образом, питающая линия (канал) 552 (Фиг. 59А) в основании 58 корпуса связана по текучей среде с питающими линиями 590/591 (Фиг. 2/59В) в корпусе 60 переднего подшипника ведущего ротора для подачи текучей среды в радиальные гибридные подшипники 72 ведущего ротора и передние цилиндрические гибридные подшипники 118 ведущего ротора. Подшипники 72/118 выполнены с возможностью восприятия соответственно радиальных/изгибных нагрузок и аксиальных нагрузок на ведущий ротор 76. Компрессор 20 выполнен с возможностью поступления высоконапорной текучей среды в компрессор 20 по питающей линии (каналу) 222 (Фиг. 60В) в корпусе 44 заднего подшипника ведомого ротора для подачи в задние цилиндрические гибридные подшипники 120 ведомого ротора, воспринимающие аксиальные нагрузки. Аналогичным образом, питающая линия (канал) 226 (Фиг. 59В) в корпусе заднего подшипника вала ведущего ротора выполнена с возможностью подачи текучей среды в задние цилиндрические гибридные подшипники 120 ведущего ротора, воспринимающие аксиальные нагрузки. Высоконапорная текучая среда может поступать в компрессор по питающей линии 224 (Фиг. 60В) для питания полости 142 позади заднего цилиндра 42 ведомого ротора. Аналогичным образом, питающая линия 228 (Фиг. 59В) может питать полость 142 позади заднего цилиндра 42 ведущего ротора. Высоконапорная текучая среда может поступать в компрессор по питающей линии 227 (Фиг. 60А) для питания полости 140 позади переднего цилиндра 32 ведомого ротора по линии 229 в корпусе 34 переднего подшипника ведомого ротора. Аналогичным образом, питающая линия 223 (Фиг. 59А) может питать полость 140 позади переднего цилиндра 32 ведущего ротора по линии 225 в корпусе 60 переднего подшипника ведущего ротора.
Прочие известные самокомпенсирующиеся гибридные подшипники без капиллярного питания
[00066] Как раскрыто в патенте США №5,281,032, некоторые примеры самокомпенсирующихся гидростатических подшипников могут работать по другим принципам. В данном примере Фиг. 1 патента США №5,281,032 изображает один из карманов гидростатического подшипника [62С], связанный по текучей среде с карманом [67А] по каналу [69А] текучей среды. Скобки «[]» в обозначения использованы для различения известных компонентов и компонентов раскрываемой новой машины.
[00067] Выражение «карман ограничителя» в данном случае служит для обозначения конструкций, аналогичных/эквивалентных карману [61А] и аналогичных компонентов (например, [61В], [61С] и [61D]). Высоконапорная текучая среда может поступать в кольцевые канавки [65А], [65В], [65С] и [65D] из отверстий [66А], [66В], [66С] и [66D] соответственно. Примыкающие площадки [68] ([68А], [68В], [68С] и [68D]) могут ограничивать поток и, тем самым, регулировать давление от кольцевых канавок [65А], [65В], [65С] и [65D] на отверстия [67А], [67В], [67С] и [67D], могущие быть связанными по текучей среде с карманами [61А], [61В], [61С] и [61D] подшипника на диаметрально противоположной стороне. «Нейтральное положение» можно определить как уравновешенный по давлению сценарий, в котором высоты зазоров по окружности цилиндрического вала равны. Под действием нагрузок возможно перемещение вала в сторону неподвижного наружного компонента. В примере, где высота зазора у площадки [68А] ограничителя увеличена относительно нейтрального положения, гидравлическое сопротивление у данного ограничителя может быть уменьшено. Таким образом, давление в отверстии [67А] ограничителя может возрасти вплоть до давления примыкающей высоконапорной кольцевой канавки [65А]. Учитывая, что канал [69А] текучей среды создает сравнительно малое гидравлическое сопротивление, возникающее в результате давление в углублении [62С] кармана подшипника может быть сопоставимо с давлением в отверстии [67А] ограничителя. Поскольку радиальная площадь проекции кармана подшипника [61С] больше, чем у кармана [64А] ограничителя, из-за результирующего вклада этих диаметрально противоположных (уравновешенных) нагрузок происходит уменьшение высоты зазора у внутренней площадки [68А] ограничителя. В одном примере ограничитель [64С] имеет высоту зазора у площадки [68С] меньше, чем в нейтральном положении. Поэтому может возрасти гидравлическое сопротивление у такого ограничителя и возникающий перепад давления. Поэтому может упасть давление в отверстии [67С] ограничителя и углублении [62А] кармана подшипника. Градиент давлений на площадках, непосредственно примыкающих к сливам [70А], [70В], [70С], [70D], [71А], [71В] и [71С] и соответствующим карманам ([62А], [62В], [62С], [62D]) подшипника или карманам ([65А], [65В], [65С], [65D]) ограничителя, может быть по существу линейным. Суммарный эффект от [61А], [61В], [61С] и [61D] может преодолевать диаметрально противоположное и уравновешенное результирующее усилие от [64А], [64В], [64С] и [64D], благодаря чему происходит самоцентрирование вала относительно указанного неподвижного компонента. Несмотря на то, что данное уравновешенное результирующее усилие может быть малым пропорционально радиальной силе реакции у [61А], [61В], [61С] и [61D], уравновешенное результирующее усилие может вращать вал. В некоторых примерах данное последствие может быть нежелательным. Следует понимать, что потребность в вязкостном сопротивлении и перекачке может быть по существу выше по сравнению с конструкцией с капиллярным питанием, имеющей такую же способность воспринимать нагрузку и содержащей площадки большей площади и дополнительный отрезок, на который может воздействовать давление слива.
Новые самокомпенсирующиеся гибридные подшипники без капиллярного питания с ограничителями в карманах подшипников
[00068] Ниже раскрыт новый самокомпенсирующийся усеченно-сферический гибридный подшипник, позволяющий уменьшить потребности в вязком трении и в утечке/перекачке по сравнению с подшипником, раскрытым в патенте США №5,281,032, и способ его создания. Более компактная конфигурация позволяет существенно увеличить несущую способность подшипника по сравнению с подшипниками эквивалентного размера. Раскрыто множество карманов подшипника, в одном примере по существу образованных круговым расположением элементов относительно центральной оси вращающегося вала. Чтобы упростить понимание читателем, обозначено и раскрыто функционирование только двух диаметрально противоположных карманов подшипника, связанных по текучей среде, при этом прочие карманы подшипника, связанные по текучей среде друг с другом, могут работать аналогичным образом.
[00069] Фиг. 71А изображает пример диаметрально противоположных карманов подшипника. Схематически представлены каналы потока и гидравлические сопротивления у площадок, чтобы читатель мог лучше понять то, каким образом расчеты показателей работы подшипника аналогичны расчетам электрических схем, как раскрыто в предыдущем разделе. При описании гидравлического сопротивления использован символ 622 электрического сопротивления, понятный специалистам в области электрических схем. Следует понимать, что сплошные линии представляют гидравлическое сопротивление, по существу более низкое, чем гидравлическое сопротивление проходов, непосредственно примыкающих к площадкам, что предполагает по существу малый (пренебрежимый/несущественный) перепад давления в этих путях потока. Углубления в одном примере выполнены глубокими, а каналы текучей среды большими по сравнению с малыми проходами потока у площадок, где ожидаемы перепады давления.
[00070] Карман 284QA подшипника, например, содержит поверхности, ограничивающие углубление, с непосредственно примыкающими площадками 290QAB/290QLA/288QR/288QL, образующими периметр. В данном примере по существу кольцевая канавка 274QA содержит поверхности, ограничивающие углубление, с непосредственно примыкающими площадками 276QA/272QA, образующими периметр вокруг канавки 274QA. В одном примере присутствует примыкающий компонент с топологией поверхности, по существу аналогичной топологии поверхности всех площадок или близкой к ней. В раскрытом примере компонент 620Q является подвижным, а примыкающий компонент 671 (Фиг. 71D) -неподвижным. В одном примере углубления, площадки и каналы текучей среды, содержащиеся в компоненте 620Q, в альтернативном варианте могли бы содержаться в непосредственно примыкающем компоненте 671, при этом один из этих компонентов выполнен с возможностью движения относительно другого компонента за счет раскрытой здесь системы подшипника с напорной текучей средой.
[00071] Высоту зазора у каждой площадки определяют как среднее нормальное расстояние между компонентами у места расположения площадки. Например, из Фиг. 2 видно, что высоты зазоров у площадок гибридных подшипников 136/134 ротора определяют как среднее нормальное расстояние между местами расположения площадок роторов 28/62 и внутренней усеченно-сферической поверхностью 114 полости корпуса. Следует понимать, что под «высотами зазоров» понимают высоты зазоров у площадок, где никакие изменения высот зазоров у углублений в целом существенно не влияют на давления, возникающие в карманах подшипника. Например, высоты зазоров могут составлять всего несколько тысячных дюйма или менее, в отличие от отверстий, могущих составлять 1/8" дюйма или менее. В одном примере, если отверстия высверлены (а не сформированы другим способом, например, трехмерной печати по металлу), может быть предпочтительно, чтобы выбранный диаметр отверстий составлял 1/30-ю или менее (например, 1/20-ю) часть длины отверстий, что позволяет снизить расходы на механическую обработку и по существу избежать отрицательных последствий, связанных с выполнением отверстий слишком большого размера. Выражение «нейтральное положение» может означать сценарий, при котором высоты зазоров у всех диаметрально противоположных площадок эквивалентны. Нейтральное положение представляет собой сценарий по существу без нагрузки, при котором давления во всех карманах подшипника по существу эквивалентны друг другу. Выбор высот зазоров на этапе сборки может зависеть от размера кармана подшипника, размеров площадки, вязкости текучей среды при рабочей температуре, ожидаемого образование тепла, расчетного градиента давлений, допустимых скоростей утечки, достижимых допусков и прочих расчетных параметров.
[00072] По существу линейный градиент давлений может существовать на площадках, где возможность турбулентности в целом исключена, и при низких рабочих частотах вращения. При более высоких рабочих частотах вращения, т.е. частотах вращения роторов 28/62 относительно поверхности 114 корпуса, перекачивающее действие гидродинамического эффекта (определение см. выше) может повлиять на градиенты давлений. Возможность турбулентности можно в целом исключить, если число Рейнольдса ниже 2000 и возможность появления малых вихрей исключена.
[00073] Глубина углублений, например, 274QA, может быть в несколько раз больше высот зазоров у площадок для обеспечения желаемого пренебрежимого гидравлического сопротивления на углубленном кармане подшипника или (кольцевой) канавке ограничителя. В одном примере глубина углублений может быть в 30-40 или более раз больше высот зазоров у площадок. В примере на Фиг. 71А карманы 284QA/284QG подшипника по существу прямоугольные, а углубление, именуемое «(кольцевая) канавка 274QA ограничителя», изображено по существу круговым/кольцевым. Следует понимать, что площадки, карманы подшипника, канавки и т.п. могут иметь формы, отличные от изображенных, в том числе эллипса или многоугольника. Поэтому слово «кольцевой» служит для удобства раскрытия, но не ограничивает компоненты «ограничителя» какой-либо конкретной формой. Гидравлическое сопротивление у площадок в одном примере, по меньшей мере, частично зависит от периметра площадок, их толщины и высоты зазора у них.
[00074] Словом «ограничитель» в данном случае совместно именуются централизованно питаемое отверстие 270QA, непосредственно примыкающая площадка 272QA, кольцевая канавка 274QA и площадка 276QA. Данные элементы представляли бы «ограничитель А» для «кармана подшипника А» 284QA в примере «Q».
[00075] Подача высоконапорной текучей среды подшипника в подшипник, в частности во внутреннюю канавку 274QA, может происходить по питающей линии 270QA подшипника. Расход потока и давление в ней может ограничивать площадка 272QA. (Кольцевая) канавка 274QA ограничителя в данном примере связана по текучей среде с карманом 284QG подшипника на диаметрально противоположной стороне по каналу 602QG текучей среды. Гидравлическое сопротивление канала 602QG текучей среды может быть пренебрежимым, в связи с чем давление в кольцевой канавке 274QA по существу эквивалентно давлению в кармане 284QG подшипника на диаметрально противоположной стороне. Канал 602QG текучей среды изображен в виде трех сегментов 604QG, 606QG и 286QG, чтобы упростить понимание читателем более сложных примеров, содержащих аналогичные обозначения. Площадки 290QFG, 290QGH, 288QR и 288QL выполнены с возможностью регулирования расхода и давления потока, исходящего из кармана подшипника 284QG. В данном примере не показаны необязательные карманы подшипника, могущие примыкать к площадкам 290QFG и 290QGH, а также возможно наличие относительно низконапорных сливов, непосредственно примыкающих к площадкам 288QR и 288QL, например. Расход и давление потока из кольцевой канавки 274QA к карману подшипника 284QA на диаметральной той же стороне может регулировать промежуточная площадка 276QA. Может быть предпочтительно, чтобы гидравлическое сопротивление у площадки 276QA было гораздо выше, чем у площадок 272QA, 288QR и 288QL, так как давление в канавке 274QA в одном примере значительно отличается от давления в кармане 284QA подшипника на диаметрально той же стороне. То, что канавка 274QA и карман 284QG подшипника на диаметрально противоположной стороне могут быть по существу отличны от кармана 284QA подшипника на диаметрально той же стороне, позволяет увеличить несущую способность. Таким образом, результирующие усилия/градиент давлений в ограничителе может вызывать смещение по существу в направлении смещающих/приложенных нагрузок противоположно эффекту самокомпенсации, создаваемому из карманов подшипника. Поэтому предусмотрено, что карманы подшипника должны иметь гораздо большую поверхность проекции, чем ограничители, для увеличения общей несущей способности. Также может быть предпочтительно, чтобы гидравлическое сопротивление у площадок 290QFG и 290QGH было выше гидравлического сопротивления у площадок 288QR и 288QL, благодаря чему давления в примыкающих карманах подшипника может быть по существу разными. Предпочтительное гидравлическое сопротивление у площадок 290QFG и 290QGH может по существу зависеть от типа подшипника, в котором применяют указанные элементы подшипника. В одном примере, можно применить решение на Фиг. 71А для создания упорного подшипника двойного действия с карманом 284QG подшипника на задней грани и карманом 284QA подшипника на передней грани. В данном примере каждая из граней содержит только один карман подшипника, при этом давления слива может существовать в непосредственной близости ко всем площадкам 288/290. В одном примере множество карманов подшипника на Фиг. 71А можно расположить по окружности вокруг цилиндрического вала для создания радиального подшипника. В данном примере общая способность воспринимать радиальные нагрузки может по существу зависеть от того, что карманы подшипника на диаметрально противоположных сторонах находятся под по существу разными давлениями. В данном случае может быть предпочтительно, чтобы число карманов было большим (например, 12), при этом такая неоднородность позволяет уменьшить окружные длины сливов 288QL/288QR по сравнению с 290QAB и 290QLA, например. Данное относительное изменение длин может увеличить гидравлическое сопротивление у площадок 290QAB/290QLA по сравнению с сопротивлением потока у площадок 288QL/288QR и, тем самым, обеспечить возможность достижения в кармане 284QA подшипника давления, более близкого к давлению слива, например. Если карманов будет слишком много, то преимущества в части возможного увеличения несущей способности могут быть сведены на нет чрезмерным сопротивлением трения и образованием тепла, возможным при наличии относительной скорости (например, вращающегося вала).
[00076] Когда высоты зазоров у площадок кармана 284QA подшипника меньше, чем они были в нейтральном положении, соответствующие гидравлические сопротивления у этих площадок могут быть выше. Уменьшение нагрузки может стать причиной смещения компонента 620Q, при котором происходит уменьшение этих высот зазоров у кармана 284QA подшипника. Это подразумевает увеличение высот зазоров у диаметрально противоположного кармана 284QG подшипнике и уменьшение сопротивлений потока у соответствующих площадок. Может иметь место больший градиент давлений между питающей линией 270QA подшипника и кольцевой канавкой 274QA, где произошло увеличение гидравлического сопротивления у площадки 272QA. Так как кольцевая канавка 274QA и карман подшипника 284QG должны иметь по существу аналогичные давления, уменьшение гидравлического сопротивления у площадок 288QR и 288QL может дополнительно снизить давление в кармане 284QG подшипника. Данное отклонение давления текучей среды может стать причиной того, что компонент 620Q будет менять свое положение относительно примыкающего компонента (не показан) до тех пор, пока не будет достигнуто равновесие. Это означает, что некая нагрузка стала причиной такого смещения, а также то, что реагирование на нагрузки в пределах способности подшипника должно происходить без непосредственного соприкосновения металлов за счет раскрытого механизма самокомпенсации.
[00077] Следует понимать, что давление в непосредственной близости от сливов 288QR или 288QL должно быть ниже, чем давление подачи у 270QA, для того, чтобы карман подшипника функционировал с самокомпенсацией. Давление в кармане 284 подшипника может представлять собой нечто среднее между самым низким давлением слива и подводимым к нему давлением. Например, давление в кармане 284QG подшипника может находиться в пределах между давлениями слива у непосредственно примыкающих площадок 288QR и 288QL и давлением у питающей линии 270QA. Примыкающие карманы «F» и «Н» подшипника в данном примере не показаны, при этом их необязательное наличие вытекает из нумерации площадок 290QFG и 290QGH. Согласно данному порядку нумерации, применяемому во всех примерах подшипников, площадка 290QFG - это площадка между карманами «F» и «G» подшипника, например «Q». Если давление у непосредственно примыкающих карманов «F» или «Н» подшипника (не показаны) ниже давления слива для кармана 284QG подшипника (карман «G»), то давление в кармане «G» может достичь такого низкого давления. В одном примере давление слива непосредственно примыкающих карманов является более низким в нетипичном сценарии, основной целью которого является демонстрация математического построения. Если подача во все карманы подшипника происходит с сопоставимым давлением, что предпочтительно для типичных случаев применения, гидравлическое сопротивление у промежуточных площадок 290QFG и 290QGH в одном примере сопоставимо с сопротивлением потока у сливных площадок 288QR и 288QL или превышает его. Другая демонстрация математического построения заключается в том, что один из сливов может находиться под давлением, даже превышающим давление подачи. В подобном случае подшипник все же может функционировать, когда гидравлическое сопротивление этого высоконапорного «слива» выше, чем у площадки, примыкающей к низконапорному сливу. В крайних проявлениях, давление в кармане подшипника может достигать давления низконапорного слива, так как влияние по существу более низкого гидравлического сопротивления у низконапорного слива должно иметь большее значение, чем математические построения. Достижение в кармане подшипника давления, близкого к давлению слива, означает, что давление в диаметрально противоположных карманах подшипника близко к давлению подачи, и то, что высоты зазоров у них по существу уменьшены.
[00078] На Фиг. 71В раскрыт другой пример «R» с аналогичной схемой нумерации для аналогичных элементов. Данный пример отличен от предыдущего примера «Q» (Фиг. 71А) в том, что подача происходит в (кольцевые) канавки ограничителя, и в том, что канал текучей среды в центре ограничителя связан по текучей среде с карманом подшипника на диаметрально противоположной стороне. При тех же размерах подшипника и ограничителя, в примере «R» суммарные давления в нейтральном положении могут быть выше. В случае упорного подшипника, сила реакции подшипника в нейтральном положении может быть выше. В одном примере радиальный подшипник содержит множество карманов подшипника, показанное на Фиг. 71В. В данной конфигурации градиент давлений на площадках 276RA может обеспечивать преимущество в части эффекта самокомпенсации, состоящее в том, что давление может в среднем находиться в диапазоне от давления подачи в канавке 274RA до давления в примыкающем кармане 284RA подшипника. Градиент давлений в пределах периферии площадки 272RA может быть нецелесообразен для эффекта самокомпенсации. При этом показано, что данная поверхность проекции может быть очень малой по сравнению с зоной в пределах периферии площадки 276QA на Фиг. 71А. Более высокие давления в карманах могут привести к тому, что потребная производительность и мощность насоса также будут более высокими.
[00079] В примере «R» питающая линия 394RA питает по существу кольцевую канавку 274RA ограничителя. Расход и давление потока в центральное отверстие 610RG в данном примере регулируют посредством площадки 272 RA. Центральное отверстие 610RG образует канал текучей среды с каналом 606RG текучей среды и каналом 286RG текучей среды, комбинация которых в настоящем описании именуется «канал 608RG текучей среды». По каналу 608RG текучей среды происходит подача в карман 284RG подшипника. Расход и давление потока в примыкающие карманы подшипника и/или сливы можно регулировать посредством площадок 290RFG, 290RGH, 288RR и 288RL. Функциональные возможности в части самокомпенсации, а также предпочтения и условные обозначения, могут быть теми же, что и в примере «Q» выше. Например, «ограничитель «А» - это наружная площадка 276RA, кольцевая канавка 274RA и внутренняя площадка 272RA. Может быть предпочтительно, чтобы гидравлическое сопротивление у наружной площадки 276RG было по существу выше, чем у площадок 290RAB, 290RLA, 288RL и 288RR в связи с тем, что эти площадки ограничивают периметр кармана 284RG подшипника, при этом может быть желательно, чтобы минимальное давление в кармане подшипника 284RG (высоты зазоров у указанных площадок больше, чем в нейтральном положении) было по существу аналогично давлению слива рядом с 288RL и 288RR. Если периметр площадки 276RG гораздо меньше по сравнению с другими площадками 290RAB, 290RLA, 288RL, 288RR, то это является одним практическим примером того, как можно увеличить гидравлическое сопротивление и одновременно сделать ограничитель более компактным. Также может быть предпочтительным, чтобы площадка 272QA была выполнена как можно более компактной. Когда высоты зазоров у кармана А подшипника меньше, чем в нейтральном положении, гидравлического сопротивления у ограничителя А, в том числе у площадки 272RA, могут быть выше. На площадке 272RA может иметь место более высокий градиент давлений, что снижает давление в диаметрально противоположном кармане 284RG подшипника. Вместе с тем, давление в кармане 284RA подшипника может быть тем выше, чем ниже гидравлическое сопротивление у ограничителя G. Это отклонение давления текучей среды может стать причиной того, что компонент 620R будет менять свое положение относительно примыкающего компонента, обращенного к карману 284RA подшипника, до тех пор, пока не будет достигнуто равновесие. Это означает, что причиной такого смещения стала некая уравновешенная нагрузка, а также то, что реагирование на нагрузки в пределах способности подшипника должно происходить без непосредственного соприкосновения поверхностей (металлов) за счет раскрытого механизма самокомпенсации. Следует понимать, что противоположные карманы могут быть расположены, как показано на Фиг. 71А или 71В для того, чтобы реакция на нагрузки была направлена по существу перпендикулярно поверхности проекции карманов подшипника. Например, по существу планарное расположение одной или более пар раскрытых карманов подшипника обеспечивает возможность реакции на аксиальные нагрузки. Если карманы расположены по окружности вокруг вала, например, то они могут реагировать на нагрузки в направлении, радиальном к валу. Карманы могут быть расположены на подвижном или неподвижном компоненте и образованы, например, выпуклой, вогнутой или планарной топологией. Нормальные векторы противоположных карманов не обязательно должны быть колинеарны, как на Фиг. 71А, 71В.
[00080] Фиг. 73-93 изображают несколько примеров типов подшипников на Фиг. 71А, 71В, применяемых на неподвижном компоненте 278А с возможностью установки вокруг вала, например, валов 40/64. Следует понимать, что условные обозначения аналогичных элементов подшипника являются аналогичными, указывая на аналогичные функции. Например, все также нужно учитывать гидравлические сопротивления у площадок, а когда высоты зазоров (у площадок подшипника) меньше, чем в нейтральном положении, давление может возрастать в соответствии с тем же механизмом самокомпенсации, что раскрыт выше.
[00081] Если раскрытые подшипники необязательно применяют при наличии относительного вращательного движения, может быть предпочтительно, чтобы сегмент канала 286 текучей среды, входящий в карман 284 подшипника, имел отклонение 30-60 градусов от нормального вектора углубленной поверхности кармана 284 подшипника. Например, в примере А (Фиг. 73-77) канал 286АА текучей среды направляет поток под таким углом в карман 284АА подшипника. Данное место входа в данном примере непосредственно примыкает к краю кармана подшипника, расположенному «выше» по потоку текучей среды по окружности в предпочтительном направлении вращения 612 относительно примыкающего компонента, обращенного к карманам подшипника и примыкающего к ним. Данный поток текучей среды по окружности подразумевает вращение указанного примыкающего компонента(-ов) относительно этих компонентов или вращение этих компонентов относительно указанных примыкающих компонентов. В любом случае, предпочтительным направлением вращения является указанное стрелкой 612, поскольку оно представляет направление потока текучей среды по окружности. Элементы подшипника могут быть выполнены на любом из компонентов. В число типичных случаев применения входят неподвижные наружные компоненты, содержащие элементы подшипника с внутренним вращающимся валом.
[00082] Следует понимать, что высоты зазоров у площадок могут быть достаточно малы, а частота вращения в некоторых случаях может быть достаточно высока для того, чтобы вал мог перекачивать текучую среду в направлении вращения. Данное гидродинамическое явление, известное как «течение Куэтта», создают силы вязкого трения, воздействующие на текучую среду. Указанное место входа, непосредственно примыкающее к данному краю, в сочетании с указанным диапазоном углов, считается предпочтительным, так как позволяет минимизировать образование вихрей при поступлении текучей среды в карман. При больших высотах зазоров может возрасти частота случаев турбулентности, которая может увеличить образование тепла. Однако очень малые высоты зазоров могут стать причиной роста образование тепла из-за касательного напряжения. Может быть предпочтительно минимизировать образование тепла, так как некоторые свойства, например, вязкость текучей среды подшипника, могут в значительной степени зависеть от температуры, а для охлаждения текучей среды подшипника может быть нужна энергия. Минимизация площади площадки может уменьшить вязкое сопротивление, но увеличить утечку. Увеличение скорости утечки может снизить КПД машины в целом из-за того, что может возрасти потребность в энергии для перекачки.
[00083] Следует понимать, что в примерах на Фиг. 73-93 примыкающий компонент - это наружная поверхность вала 64, образующая по существу малые высоты зазоров до площадок на поверхностях подшипника. Вращение компонентов на Фиг. 73-93 относительно друг друга не обязательно. Карманы подшипника могут воспринимать нагрузки по существу перпендикулярно поверхности проекции карманов подшипника.
Пример А подшипника
[00084] В примере А подшипника на Фиг. 73-77 неподвижный внутренний компонент 278А гибридного подшипника 282А может быть установлен способами горячей посадки, прессовой посадки или иным образом прикреплен к неподвижной наружной втулке 280А. Горячая посадка - это способ, при котором натяг обеспечивают за счет относительного изменения размера после сборки. Для этого один компонент нагревают или охлаждают перед сборкой, а затем дают вернуться к температуре окружающей среды после сборки, используя явление теплового расширения для создания соединения. Например, тепловое расширение отрезка металлической дренажной трубы позволяет строителю посадить на нее охлаждающий элемент. Когда соединенные элементы достигнут одинаковой температуры, соединение станет натянутым и более прочным. По существу цилиндрический компонент, например, вращающийся вал, т.е. вал 64, обращенный радиально непосредственно вовнутрь внутреннего компонента 278А, может содержать наружные поверхности по существу того же профиля, что и внутренние поверхности внутреннего компонента 278А, в котором образован небольшой зазор между компонентами. Подшипники выполнены с возможностью восприятия нагрузок по существу перпендикулярно поверхности проекции карманов подшипника. Гибридный подшипник 282А выполнен с возможностью восприятия по существу только радиальных нагрузок. При этом комбинация двух или более таких подшипников на одном и том же валу может воспринимать по существу изгибные нагрузки, под действием которых может происходить изгибание вала.
[00085] Поток может поступать в гибридный подшипник 282А через питающий канал 268А, связанный по текучей среде с централизованно питаемыми ограничителями через питающие отверстия 270А(А-L). Расход и давление потока из 270АА можно регулировать на внутренней площадке 272АА с последующим поступлением в по существу кольцевую канавку 274АА, связанную по текучей среде с противоположным карманом 284AG подшипника последовательными каналами 604AG, 606AG и 286AG текучей среды. Как было раскрыто на примере Фиг. 71А, чем меньше высоты зазоров у кармана подшипника, тем больше могут быть давление и гидравлическое сопротивление этого кармана и тем меньше может быть давление и гидравлическое сопротивление противоположного кармана подшипника. Это позволяет создавать эффект самокомпенсации до тех пор, пока не будет достигнуто равновесие с приложенной нагрузкой.
Пример В подшипника
[00086] На Фиг. 78-82 неподвижный внутренний компонент 362В гибридного подшипника 282В может быть прикреплен к компоненту 280В. Поток может поступать в гибридный подшипник 282В по питающему каналу 268В, связанному по текучей среде с кольцевыми канавками 274ВА ограничителя через питающие отверстия 270B(A-L). Расход и давление потока из 274ВА можно регулировать на внутренней площадке 272ВА с последующим поступлением в центральное отверстие 394ВА, связанное по текучей среде с противоположным карманом 284BG подшипника последовательными каналами 604BG, 606BG и 286BG текучей среды. Как было раскрыто на примере Фиг. 72, чем меньше высоты зазоров у кармана подшипника, тем больше могут быть давление и гидравлическое сопротивление этого кармана и тем меньше может быть давление и гидравлическое сопротивление противоположного кармана подшипника. Это позволяет создавать эффект самокомпенсации до тех пор, пока не будет достигнуто равновесие с приложенной нагрузкой. В данном примере поверхность подшипника выполнена усеченно-конической. Смещения в аксиальном направлении могут равномерно увеличивать или уменьшать высоты зазоров. Равномерное уменьшение всех высот зазоров может уменьшить необходимый расход перекачки и увеличить ожидаемое образование тепла и вязкое сопротивление трения. Противоположного эффекта ожидают в случае равномерного увеличения всех высот зазоров из-за аксиального перемещения. Гидравлические сопротивления могут равномерно возрасти или упасть для всех площадок подшипника, что подразумевает отсутствие изменения давления в каком-либо из карманов подшипника из-за чистого аксиального перемещения. Эффект самокомпенсации можно ожидать в случаях радиальных смещений или угловых смещений, которые в ином случае оказывали бы изгибающее воздействие на вал (не показано).
Примеры С и D подшипников
[00087] Гибридный подшипник 282CD на Фиг. 83-93 содержит поршневой компонент 292CD, промежуточную втулку 482CD, внутренний компонент 484CD, уплотнения 486CDA, 486CDB, 486CDC, «направляющие поршневые кольца» 488CDA и 488CDB и торцевую крышку 490CD, прикрепленные друг к другу в одном примере болтами, посадкой с натягом, прессовой посадкой, сваркой, пайкой твердым припоем или иными средствами или способами крепления внутри наружного корпуса 494CD. Направляющие штифты 492А, 492В и 492С могут быть прикреплены к поршневому компоненту 292CD. Как видно из Фиг. 89, направляющий штифт 492CDC может образовывать полость 506С с наружным корпусом 280CD. Направляющие штифты 492CDA и 492CDB могут иметь одинаковую конструкцию. Направляющие штифты выполнены с возможностью, при использовании в комбинации двух или более направляющих штифтов, по существу поддержания при вращении правильного относительного положения наружного корпуса 280CD с торцевой крышкой 490CD и поршневого компонента 292CD, в связи с чем сливные отверстия 448CD нужны только в днище подшипника. Направляющие штифты 492CDA и 492CDB могут быть выполнены с возможностью не создавать помех аксиальному перемещению поршневого компонента 292CD при необходимости. В примерах на Фиг. 89-90, если канал 508С текучей среды в направляющем штифте 492CD достаточно большой, давление в полости 506С в одном примере может быть по существу равно давлению в полости 298CD. Следует понимать, что направляющие штифты можно применять и в других раскрытых в настоящем документе примерах подшипников, выполненных с возможностью восприятия аксиальных и изгибных нагрузок. Кроме того, вращающийся вал с радиальным элементом может образовывать по существу небольшие зазоры с примыкающими поверхностями подшипника, раскрытыми ниже.
[00088] Питающие отверстия 270С(А-Н) и 270D(A-L) примеров С и D подшипников соответственно связаны по текучей среде с питающим каналом 268CD. Расход и давление потока из 270С(А-Н)/270D(A-L) можно регулировать на внутренней площадке 272СА/272DA с последующим поступлением в по существу кольцевую канавку 274СА/274DA, связанную по текучей среде с противоположным карманом 284СЕ/284DG подшипника последовательными каналами 604СЕ/604DG, 606СЕ/606 DG и 286СЕ/286DG текучей среды. Как было раскрыто на примере Фиг. 71А, чем меньше высоты зазоров у кармана подшипника, тем больше может быть давление и гидравлическое сопротивление этого кармана и тем меньше может быть давление и гидравлическое сопротивление противоположного кармана подшипника. Это позволяет создавать эффект само компенсации до тех пор, пока не будет достигнуто равновесие с приложенными нагрузками, вызывающими радиальные или угловые смещения, которые в ином случае оказывали бы изгибающее воздействие на вал. Прочие примеры подшипников
[00089] В примере на Фиг. 2 и Фиг. 6, 7 кольца 38 содержат по существу планарные поверхности 673, примыкающие к переднему/заднему поршням 32/42. Планарные поверхности отстоят от поршней с образованием по существу небольших зазоров между ними в подшипниках 118/120. Отверстия 108 в раскрытом примере обозначают возможные места прикрепления ограничителей 348А или 384В (Фиг. 65-69). Один пример конструкции данного капиллярного ограничителя раскрыт на Фиг. 65-69. Применение капиллярных ограничителей в указанных местах по окружности колец 38 позволяет воспринимать аксиальные или угловые смещения или отклонения, которые в ином случае оказывали бы изгибающее воздействие на валы 40/64 ведомого/ведущего роторов.
[00090] В одном примере капиллярные ограничители 348 и расположенные ниже по потоку карманы 208 подшипника в альтернативном варианте могли бы быть расположены на несущих поверхностях колец 38 (например, по существу планарных поверхностях 673 на Фиг. 6-7), при этом передний/задний поршни 32/42 могут содержать по существу планарные поверхности в непосредственной близости. В примерах на Фиг. 61-63 проиллюстрированы поверхности, выполненные с возможностью подачи текучей среды во вращающийся компонент, содержащий отверстие 212 во вращающейся части (например, вале 40 ведомого ротора), постоянно связанное по текучей среде с примыкающей канавкой 211 (Фиг. 60С) на неподвижном компоненте. Или же в кольцах 38 могут быть применены конструктивные решения на Фиг. 71А или Фиг. 71В с питающими линиями 270 или 394, питаемыми аналогичным образом. Например, карман 284QA подшипника может представлять собой один карман подшипника 118, а карман 284QG подшипника - один карман подшипника 120. На Фиг. 71А показано, что эти карманы подшипника могут быть расположены прямо напротив друг друга. При наличии множества карманов подшипника в подшипниках 118 и 120, они могут воспринимать комбинацию аксиальных и угловых смещений.
[00091] Конструктивные решения на Фиг. 71А и Фиг. 71В можно модифицировать, добавив один или более капиллярных ограничителей для подачи текучей среды в карманы подшипника. Канал 286QG текучей среды выполнен с возможностью подачи текучей среды в карман 284QG подшипника. Капиллярный ограничитель 348 (примеры на Фиг. 66-69) выполнен с возможностью применения параллельно с каналом 286QG текучей среды так, чтобы смешивание потоков из каждого канала текучей среды происходило только в кармане 284QG подшипника. Так гидравлическое сопротивление капиллярного ограничителя 348 будет параллельно эквивалентному сопротивлению потока между каналом 270QA и карманом 284QG подшипника на диаметрально противоположной поверхности подшипника. При применении в таких примерах, как пример С подшипника на Фиг. 83-93, пример подшипника С может быть выполнен с возможностью восприятия аксиальных и угловых смещений. Пример подшипника CD может быть выполнен с возможностью восприятия аксиальных, угловых и радиальных смещений.
[00092] Такие конструктивные решения, как на Фиг. 71А и Фиг. 71В, можно модифицировать, добавив один или более капиллярных ограничителей на имеющемся пути потока, например, в канале 602QG или 270QA. Если по существу большую процентную доля потока принудительно пропускать через капиллярный ограничитель в одном из этих каналов текучей среды, он будет функционировать как устройство, создающее последовательное гидравлическое сопротивление.
[00093] В примерах гибридных подшипников раскрыты карманы 284 подшипника в виде поверхностей, углубленных относительно поверхностей примыкающей площадки. Углубленные карманы 284 подшипника выполнены с возможностью уменьшения трения между конструкцией, на которой они сформированы, и примыкающей поверхностью, могущей перемещаться относительно кармана подшипника. В одном примере на Фиг. 71В углубленные карманы 284 подшипника содержат вход 394 напорной текучей среды и, за счет этого, выполнены с возможностью уменьшения трения между компонентом 620 и примыкающей прилегающей поверхностью 671' компонента 671 на Фиг. 71С-71D. В одном примере машина выполнена с возможностью по существу недопущения изменения распределения давления в пределах кармана. Изменение распределения давления возможно на площадках, где ограничение потока может быть по существу выше. Или же карманы подшипника также могут быть выполнены без углубления карманов подшипника относительно площадок, если периметр кармана 284 подшипника ограничен множеством поверхностей, ограничивающих отверстия 286. Отверстия 286 в примере на Фиг. 71А связаны по текучей среде с по существу круговой кольцевой канавкой 274 у диаметрально противоположных карманов подшипника, где происходит подача высоконапорной текучей среды в центральные отверстия 270. В модифицированной конструкции на Фиг. 71В, где подача высоко напорной текучей среды происходит в круговые кольцевые канавки 274, каждое центральное отверстие 610 связано по текучей среде с отверстиями 286 в диаметрально противоположном кармане подшипника. Давление подачи у питающих каналов противоположных карманов подшипника в таком примере может быть по существу таким же, как в случае, когда ограничение потока в соединенном канале текучей среды по существу меньше, чем ограничение потока у поверхности подшипника, например, площадь площадки между вводами и сливами. В одном примере вызванный давлением поток принят ламинарным для большей точности при применении раскрытого в настоящем документе способа расчета. Данный вызванный давлением поток известен в области гидродинамики как «пуазейлевское течение». Известно, что ламинарный поток через проход постоянного поперечного сечения может создавать по существу линейный градиент давлений от одного до другого конца. В число примеров с постоянным поперечным проходным сечением может входить поток по трубе или поток через две параллельные пластины. Параллельные «пластины» могут представлять собой парные вогнутые/выпуклые поверхности, например наружный корпус и внутренний вал в раскрытых примерах гибридных подшипников. В случае сообщения относительной скорости, под действием вызванного сопротивлением трения потока (течения Куэтта) может происходить «перекачка» по существу несжимаемой жидкости в направлении относительных скоростей компонентов (т.е. гидродинамический эффект). В приведенном примере вала поток текучей среды по окружности создает дополнительные скачки давления у краев карманов подшипника, могущих вносить вклад в создание дополнительной несущей способности. Данный дополнительный уровень сложности можно учитывать в исследованиях по способу вычислительной гидродинамики (ВГД) или по иным известным способам. При этом предложен упрощенный подход к расчету, могущий недооценивать несущую способность гибридного подшипника при наличии гидродинамического эффекта.
[00094] Создание множества входов текучей среды по периметру, где желателен карман подшипника, обеспечивает возможность того, что давление между указанными входами текучей среды будет по существу равно по величине, а также возможность функционирования, как если бы карман был углублен целиком, тем самым обеспечивая по существу аналогичную способность воспринимать нагрузки, вызванные гидростатическим эффектом. Например, на Фиг. 71А карман 284QA подшипника изображен углубленным и ограниченным непосредственно примыкающими площадками 290QAB, 290QLA, 288QL, 288QR и 276QA. Показано, что подача в карман 284QA подшипника происходит через вход текучей среды/отверстие 286QA. В альтернативном варианте, если карман 284QA подшипника не углублен, а существует множество отверстий 286 и/или канавки, ограничивающие периметры указанных площадок, распределения и градиенты давления из-за гидростатического эффекта могут быть по существу аналогичны тем, что имеют место в случае углубленного кармана 284QA подшипника на Фиг. 71А. Если сравнить карман подшипника без углубления с карманом подшипника того же размера, но с углублением, карман подшипника без углубления может иметь более высоко расположенную поверхность с небольшими зазорами, что в одном примере позволяет увеличить гидродинамический эффект и, как следствие, общую несущую способность подшипника. Данная модификация может создавать относительно более высокое вязкое сопротивление и образование тепла, поэтому может быть важно оценить ожидаемое преимущество от гидродинамического эффекта для общей несущей способности (если такового ожидают). В примерах, где несущую способность подшипника нельзя увеличить иными средствами (например, путем увеличения площади поверхности подшипника и/или давления подачи), можно применить данную модификацию. В одном примере потери энергии и дополнительный нагрев текучей среды из-за дополнительного вязкого сопротивления могут быть существенными, а преимущества от гидродинамического эффекта могут зависеть от минимальной относительной поверхностной скорости на поверхностях подшипника.
Регулирование теплового расширения у подшипников
[00095] В одном примере гибридный подшипниковый узел 282CD на Фиг. 83-93 выполнен с возможностью применения вместо заднего цилиндра 42 на Фиг. 8В. В данном примере передний цилиндр 32 (Фиг. 8А) может не быть нужен. Поршневой компонент 292CD может быть собран с промежуточной втулкой 482CD, внутренним компонентом 484CD, торцевой крышкой 490CD и наружным корпусом 280CD с образованием полости 298CD (Фиг. 89). Полость 298CD может быть уплотнена посредством уплотнений 486CDA, 486CDB, 486CDC и наружного корпуса 280CD. Такая полость может быть функционально аналогична полости 142 на Фиг. 2 или Фиг. 8А и служить для аксиального перемещения заднего цилиндра 42 относительно корпуса заднего подшипника ведомого/ведущего ротора 44/70, как раскрыто в настоящем описании. Гибридный подшипниковый узел 282CD может воспринимать радиальные нагрузки, при этом возможно применение направляющих поршневых колец 488CDA и 488CDB. Направляющие поршневые кольца могут представлять собой съемный компонент, как показано, или являться частью поршневого компонента 292CD и наружного корпуса 280CD. Канавка 452CD может быть выполнена с возможностью удержания разрезного кольца или его аналога для надежного прикрепления друг к другу поршневого компонента 292CD, промежуточной втулки 482CD и внутреннего компонента 484CD. Торцевую крышку 280CD закрепляют на месте посредством болтов или иных крепежных изделий или способов, тем самым закрепляя уплотнения 486CDA и 486CDB и направляющее поршневое кольцо 488CDA. Отверстие 456CD на Фиг. 89 изображено в качестве примера конструкции с возможностью прикрепления компонентов болтом. Канавка 454CD может быть выполнена с возможностью удержания стопорного кольца для прикрепления направляющего поршневого кольца 488CDB к наружному компоненту 280CD. Направляющие поршневые кольца 488CDA и 488CDB обеспечивают возможность аксиального перемещения внутреннего компонента 484CD (и прикрепленных компонентов, например, поршня 292CD) относительно неподвижных компонентов (например, наружного компонента 280CD) при необходимости с минимальным трением. Направляющее поршневое кольцо 488CDA выполнено с возможностью перемещения, будучи прикрепленным к поршню 292CD, за счет закрепления торцевой крышки 490CD в отличие от того, как направляющее поршневое кольцо 488CDB показано прикрепленным к неподвижному наружному компоненту 280CD. В любом случае ожидают, что у направляющих поршневых колец 488CDA/488CDB будут происходить относительные аксиальные перемещения. Низкий коэффициент трения направляющих поршневых колец 488CDA/488CDB обеспечивает возможность такого перемещения с относительной легкостью, а поскольку этот материал является более мягким, ожидают, что он будет демонстрировать признаки износа, и, при необходимости, его можно будет заменить без излишних затрат, с минимальным или нулевым износом на примыкающем наружном корпусе 280CD или внутреннем компоненте 484CD соответственно.
Несущая способность подшипника
[00096] В одном примере может возникнуть перекрестная связь между канавками. Такая перекрестная связь может уменьшить несущую способность подшипника. Например, на Фиг. 84 канавка 606DA может быть расположена в непосредственной близости от канавки 606LA и 606DB, т.е. в конфигурации без плотной пригонки может иметь место некоторая перекрестная связь (поток между примыкающими канавками/карманами). В примерах, где желательно наличие большого числа карманов 284 подшипника, можно применить промежуточную втулку 482CD на Фиг. 84. Чем больше число карманов подшипника на радиальном подшипнике, тем больше может быть способность подшипника воспринимать радиальные нагрузки. Дополнительная площадь площадки может увеличить вязкое сопротивление и нагрев из-за трения в компонентах, соприкасающихся или почти соприкасающихся из-за перемещения относительно друг друга. Кроме того, из-за более высокой температуры текучей среды подшипника на выходе может возрасти потребность в энергии для охлаждения текучей среды до температуры подачи. Учитывая то, что чем выше температуры, тем меньше может быть вязкость и, как следствие, способность подшипника воспринимать нагрузки, в некоторых случаях применения может быть желательно увеличение скоростей утечки для регулирования роста температуры. В некоторых примерах гидродинамический эффект может особенно зависеть от вязкости, а влияние гидростатического эффекта теоретически может быть минимальным. Расход дополнительной энергии на перекачку и прочие эффекты возрастания паразитной мощности могут быть оправданы, если подшипник рассчитан на работу вблизи максимальной несущей способности, однако эти компромиссы следует изучить при определении числа карманов подшипника. Раскрытые в настоящем описании варианты осуществления «упорного» подшипника могут быть выполнены с возможностью восприятия изгибных нагрузок, чье воздействие могло бы изгибать вал при наличии множества карманов подшипника. При наличии только одного концентрического кольцевого кармана подшипника, подшипник в некоторых примерах мог бы не быть способным воспринимать изгибные нагрузки, чье воздействие могло бы изгибать вал. В случаях применения, где прогнозируют в основном аксиальные нагрузки, оптимальным выбором могут быть 8 или менее карманов подшипника, а более 8 карманов подшипника может быть оптимально в случаях, где прогнозируют в основном изгибные нагрузки.
Подача текучей среды в самокомпенсирующиеся гибридные подшипники без капиллярного питания с ограничителями в карманах подшипника
[00097] Примеры на чертежах иллюстрируют то, как может происходить подача в самокомпенсирующиеся гибридные подшипники с капиллярным питанием, включенные в состав ротационной машины 20. Например, на Фиг. 60А единственная питающая линия 218 связана по текучей среде с кольцевой канавкой 219, связанной по текучей среде с множеством каналов 221 текучей среды (Фиг. 60В), питающих множество карманов подшипника гибридных опорных подшипников 138 ведомого ротора. В одном примере эти же примеры могут быть применимы к подаче текучей среды в самокомпенсирующиеся гибридные подшипники 138/72/118/120 без капиллярного питания с ограничителями 277 (Фиг. 71А) в карманах 284 подшипника.
Новые само компенсирующиеся гибридные подшипники без капиллярного питания с противоположными ограничителями и карманами подшипника
[0077] В примерах гибридных подшипников на Фиг. 71А-71В и Фиг. 73-93 ограничители 277 выполнены в пределах кармана 284QA подшипника на диаметрально противоположной стороне от кармана 284QG подшипника. В одном примере подача текучей среды в карман 284QG подшипника происходит под давлением по питающей линии 270QA. Данная конфигурация в целом неприменима к гибридным подшипникам 136/134 ведомого/ведущего роторов в примерах с нечетным числом лопастей, в которых впадины 82 расположены диаметрально противоположно лопастям (78А и 78В). В примерах с четным числом лопастей данную конфигурацию применять можно. В другом примере с четным числом лопастей 78 наибольшую нагрузку ожидают во впадине 82, где опирание на подшипник минимально. Кроме того, ожидают, что нагрузки у гибридных подшипников ведомого/ведущего ротором могут быть существенными. Источником существенных вызванных давлением радиальных или аксиальных нагрузок может быть камера 144 сжатия. Чем больше угол смещения между осями 637/639 валов ведомого/ведущего роторов («угол альфа») на Фиг. 103, тем больше радиальная составляющая нагрузки давления и тем меньше ее аксиальная составляющая. Чем больше углы смещения, тем больше может быть объемная производительность при том или ином диаметре ротора и эвольвентном профиле ротора, в связи с чем их обычно считают предпочтительными вплоть до верхних пределов, зависящих от минимального диаметра валов 41/65 ведомого/ведущего роторов. Минимальный диаметр валов 41/65 ведомого/ведущего роторов может быть по существу обусловлен их конструкционной жесткостью и прочностью, а также иными факторами, в том числе тем, как могут быть собраны прочие компоненты. В примере на Фиг. 103 показано, что вал 41 ведомого ротора содержит, такие компоненты, как основная заслонка 171 и кожух 181 основной заслонки у внутреннего диаметра. Чем больше угол альфа, тем глубже врезаны впадины 82А (Фиг. 115) в вал 41 ведомого ротора. Возможность такой же конфигурации можно обеспечить за счет уменьшения диаметров кольца 37А ведомого ротора и вала 41 ведомого ротора. Чтобы сохранить толщину вала 41 ведомого ротора без изменений, может быть нужно уменьшить диаметр основной заслонки 171 и кожуха 181 основной заслонки. Это может ограничить путь потока в выпускной камере 669 больше, чем нужно, и/или отрицательно повлиять на конструкционную жесткость тех компонентов и вала 41 ведомого ротора, у которых конструкционная жесткость может быть по существу пропорциональна величине наружного диаметра.
[0078] В тех примерах, где карман подшипника содержит ограничители 277, площадь, доступная для восприятия нагрузок, меньше, в связи с чем для обеспечения той же несущей способности нужно было бы повысить давление подачи в подшипник. Кроме того, если лопасти (78А и 78В) ротора обладают относительно большим диаметром и массой, то во время вращения их валов с относительно высокой частотой, на лопасти 78 ротора может воздействовать давление в направлении радиально наружу в сторону усеченно-сферической поверхности 114 корпуса 55. В отсутствии вызванных давлением нагрузок от камеры 144 (между роторами), это центробежное нагружение может стать причиной отклонения лопастей 78 ротора в сторону внутренней усеченно-сферической поверхности 114В корпуса (Фиг. 103). В конфигурации с ограничителями внутри карманов подшипника может отсутствовать эффект само компенсации центробежного нагружения или теплового расширения, в отличие от раскрытых здесь конструкций гидростатического подшипника (необязательно с капиллярным питанием). В примерах на Фиг. 102-163, гибридные подшипники 135А/135В ведомого/ведущего ротора (например, Фиг. 120) выполнены с возможностью самокомпенсации центробежного нагружения и теплового расширения без применения капиллярных ограничителей. Радиальные (137А/137В), задние упорные (139А/139В) и передние упорные (129А/129В) гибридные подшипники валов ведомого/ведущего роторов также выполнены с возможностью самокомпенсации центробежного нагружения и теплового расширения без применения капиллярных ограничителей.
[0079] В настоящем описании раскрыта конфигурация с множеством карманов 285 подшипника, в одном примере по существу образованных круговым расположением элементов относительно центральной оси 637/639 вращающегося вала. Для удобства раскрытия обозначены и рассмотрены рабочие характеристики только двух противоположных ограничителей и карманов подшипника, связанных по текучей среде, при этом прочие связанные друг с другом по текучей среде противоположные ограничители и карманы подшипника могут работать аналогичным образом. На Фиг. 71А и Фиг. 71С-71D было раскрыто, что площадки 290/288/276/274/272 на компоненте 620 образуют по существу небольшие зазоры относительно примыкающей поверхности 671' прилегающего компонента 671. На Фиг. 72А, 72В и 149 площадки 611/293/291/289/287/272 образуют по существу небольшие зазоры относительно примыкающей поверхности 671', как показано на Фиг. 71D для примера на Фиг. 71А.
[0080] Примеры гибридных подшипников на Фиг. 102-148 выполнены с возможностью самокомпенсации отклонений компонентов (например, из-за теплового расширения или центробежного нагружения) и смещений компонентов (например, из-за вызванных давлением нагрузок от камеры) по принципам, раскрытым для примеров гибридных подшипников, весьма схематично изображенных на Фиг. 72А-72В. Данная конфигурация полностью раскрыта ниже. Примеры гибридных подшипников на Фиг. 150-163 могут быть выполнены с возможностью самокомпенсации по принципам, раскрытым для примера, весьма схематично изображенного на Фиг. 149. Данная конфигурация также полностью раскрыта ниже.
[0081] Фиг. 72А, 72В и 149 изображают примеры, содержащие диаметрально противоположные ограничители 277 и карманы 285 подшипника. В примере на Фиг. 71А и Фиг. 71В схематически представлены каналы потока и сопротивления 622 потока на площадках. Как и на предыдущих чертежах, сплошные линии потока представляют пренебрежимое гидравлическое сопротивление, подразумевающее пренебрежимый перепад давления на этих путях потока. Углубления 284/274/и т.д. могут быть достаточно глубокими, а каналы 270/286/и т.д. потока достаточно большими по сравнению с небольшими проходами потока у площадок 290 и т.д., где ожидают возникновения перепадов давления. Высоту зазора у каждой площадки определяют как среднее нормальное расстояние между компонентами у площадки и примыкающей поверхностью 671' у площадки. Следует понимать, что «высоты зазоров» означают высоты зазоров (измеренных ортогонально поверхности 293/291/289/287/272 (и 611 на Фиг. 149) у площадки и примыкающей поверхности 671') у площадок, где какие-либо изменения высот зазоров у углублений не должны оказывать существенное влияние на давления, возникающие в углублениях. Текст описания в предыдущих примерах на Фиг. 71А-71В в том, что касается глубины углубления, размера канала текучей среды, линейных градиентов давлений и турбулентности, применим к примерам на Фиг. 72А, 72В и 149. Как сказано выше, многие из раскрытых здесь элементов могут быть выполнены в любых желаемых формах. Прямолинейные и эллиптические конструкции изображены для удобства иллюстрирования. Поскольку гидравлическое сопротивление у площадок может зависеть от периметра, толщины и высоты зазора у площадок, могут быть выбраны формы площадок и углублений, отличные от приведенных примеров. Компонент 620S/620Т/620U на Фиг. 72А, 72В и 149 именуется подвижным в том смысле, что он не входит в непосредственное соприкосновение с примыкающей поверхностью (например, 671' на Фиг. 71D) при перемещении относительно нее. В одном примере примыкающий компонент 671 является неподвижным, в связи с чем имеет место перемещение компонента 620S/620Т/620U относительно поверхности 671'. В одном примере углубления, площадки и каналы текучей среды, содержащиеся в компоненте 620S/620Т/620U, могут, в качестве альтернативы, содержаться в непосредственно примыкающем компоненте 671, при этом любой из компонентов 620 или 671 выполнен с возможностью движения относительно другого из компонентов за счет раскрытой здесь системы подшипника с напорной текучей средой. Предпочтительное место расположения элементов подшипника (т.е. карманов, площадок, каналов текучей среды) может зависеть от конкретной геометрической формы частей, а также от того, как каналы текучей среды будут соединять ограничители и карманы подшипника, и от того, желательно ли уменьшить общую производственную себестоимость и/или создать более компактный узел.
[0082] В примере на Фиг. 72А карман 285 подшипника SA' содержит поверхности, ограничивающие по меньшей мере одно углубление 285' с непосредственно примыкающими площадками 291SA'L/291SA'R/287SL/287SR, образующими приподнятый или радиально (относительно центра компонента 620S/620Т/620U) выступающий периметр вокруг кармана 285SA' подшипника. По существу прямоугольное «питающее углубление» 275SA содержит поверхности, ограничивающие углубление, с непосредственно примыкающими площадками 293SAL, 293SAR, 289SL и 289SR, образующими наружный периметр, и примыкающей площадкой 272SA, образующей площадку по внутреннему периметру. Площадка (например, 272SA) по внутреннему периметру и поверхности, ограничивающие отверстие (например, 609SA'), в настоящем описании именуются «ограничитель» 277, который следует отличать от капиллярных ограничителей на Фиг. 65-69. Подача высоконапорной текучей среды в питающее углубление 275SA происходит по питающей линии/каналу 395SA подшипника. Площадка 272SA выполнена с возможностью ограничения расхода и/или давления потока в подшипнике до его поступления во внутренний канал 609SA' текучей среды. Гидравлическое сопротивление внутреннего канала 609SA' текучей среды может быть пренебрежимым, а в одном примере он связан по текучей среде с диаметрально противоположным карманом 285SA' подшипника. Расход и давление потока из кармана 285SA' подшипника можно регулировать посредством площадок 291SA1/291SA'R/287SL/287SR. В одном примере карманы 285 подшипника выполнены непосредственно примыкающими к площадкам 291SA'L и 291SA'R и могут содержать напорные сливы 287', примыкающие к площадкам 287SL и 287SR. В другом примере давление у углубления/«слива» 291'L и/или углубления/«слива» 291'R может быть не ниже давления высоконапорной текучей среды, подаваемой в питающее углубление 275SA. Расход и давление потока из питающего углубления 275SA можно регулировать посредством площадок 293SAL, 293SAR, 289SL и 289SR. Может быть предпочтительно, чтобы гидравлическое сопротивление у площадок 293SAL, 293SAR, 289SL и 289SR было выше, чем гидравлическое сопротивление у площадок 291SA'L/291SA'R/287SL/287SR кармана подшипника, если давление вблизи наружных площадок указанного питающего углубления ниже давления вблизи наружных площадок, примыкающих к указанному карману подшипника. Больший градиент давлений у наружных площадок питающего углубления 275SA может быть причиной скорости утечки, превышающей желаемую, без вклада в суммарную несущую способность, поэтому в данном примере гидравлическое сопротивление у наружной площадки питающего углубления можно увеличить для уменьшения утечки с одновременным увеличением трения/образования тепла. В одном примере питающее углубление 275SA выполнено с возможностью образования сплошной по окружности зоны только с площадками 289SL и 289SR. В другом примере питающее углубление 275SA может представлять собой отрезок (например, по окружности), более короткий, чем соответствующий карман 284 подшипника, а в непосредственной близости к 293SAL и 293SAR может находиться напорный слив.
[0083] Конструкция с противоположными ограничителем и карманами подшипника на Фиг. 72А вновь представлена на Фиг. 72В в виде карманов 277 ограничителя (и окружающего питающего углубления) 275, латерально смещенных от карманов 285 подшипника. Данный пример с чередующимися противоположными ограничителями 277 и карманами 285 подшипника функционирует также, как было раскрыто на примере Фиг. 72А, при этом аналогичные номера обозначают аналогичные элементы. Например, питающие углубления 275SA и 275ТА могут быть аналогичными. Сливная полость 453' изображена между площадкой 287TR кармана 285TG' подшипника и площадкой 289TL питающего углубления 275ТА. При этом, как раскрыто в примере на Фиг. 149, сливная полость 453' не нужна в некоторых случаях применения с объединением площадок 287TR и 289TL. Объединенная площадка обозначена «611U» на Фиг. 149 и является общей для кармана 285UG' подшипника и питающего углубления 275UA. В данной конфигурации с чередующимися противоположными ограничителями и карманами подшипника может быть предпочтительно, чтобы гидравлическое сопротивление у площадки 611U было выше, в одном примере по существу выше, чему у других площадок 287UL/291UG'L/291UG'R кармана подшипника, с точки зрения возможности более низкого давления в кармане 285UG' подшипника, что увеличивает несущую способность. Если карманы подшипника непосредственно примыкают к площадкам 291UG'L и 291UG'R, может быть предпочтительно, чтобы гидравлическое сопротивление у этих площадок были выше гидравлического сопротивления у площадки 287UL в примере, где низконапорный слив непосредственно примыкает к площадке 287UL, что обеспечивает возможность достижения в кармане 285UG' подшипника по существу аналогичного низкого давления и, тем самым, увеличения несущей способности.
Примеры Е-Р подшипников с регулируемым давлением внутреннего шара - применительно к Примеру В
[0084] В примерах S/Т/U на Фиг. 72А/72В/149 каналы 609 текучей среды соединены по текучей среде между диаметрально противоположными ограничителями 274 и карманами 285 подшипника. Следует понимать, что, поскольку в примерах гибридных подшипников Е, F, G, Н, I, J, K, L, М, N, О и Р на Фиг. 137-148 и Фиг. 152-163 использована аналогичная нумерация, вышеприведенное описание применимо к каналам 609 текучей среды (Е-Р) и прочим элементам с аналогичными номерами для сокращения настоящего раскрытия. Пример ротационной машины 20 на Фиг. 102-102Е содержит примеры гибридных подшипников с Е по J (Фиг. 137-148). В примере ротационной машины 20 на Фиг. 150, 151 изображены примеры гибридных подшипников с К по Р (Фиг. 152-163). Указанные примеры ротационной машины 20 содержат гибридные подшипники, выполненные с возможностью восприятия аксиальных, радиальных и/или изгибных нагрузок за счет комбинации отдельных углубленных карманов подшипника с разными давлениями. Приложение давления к какой-либо зоне (в кармане подшипника) приводит к возникновению усилия, зависящего от относительного положения «подвижного» компонента, как разъяснено в настоящем документе.
[0085] Гибридные подшипники 135А/135В (Фиг. 120) ведомого/ведущего ротора выполнены с возможностью восприятия нагрузок, перпендикулярных углубленным карманам 285. В одном примере, где роторы 28/76 аксиально отстоят друг от друга по одной линии относительно осей 637/639 их валов (Фиг. 103), по существу небольшие зазоры 641А/641В (Фиг. 103Е/103D) между площадками карманов подшипников ведомого/ведущего роторов и внутренней поверхностью 114В корпуса 55В уменьшены, и аксиальное перемещение не может повлиять на зазоры 643А/643В (Фиг. 103В/103А) у ограничителей 277. Если зазор 645А/645В у площадок кармана подшипника уменьшен по сравнению с зазором 647А/647В у соответствующего ограничителя, давление в кармане может расти до тех пор, пока не будет достигнуто равновесие. Это обеспечивает возможность реагирования подшипника на отклонение из-за теплового расширения и центробежных нагрузок. Если произведение температуры и диаметра у лопастей ротора больше, чем у вала ротора, возможна само компенсация теплового расширения. Если происходит вращение компонентов относительно примыкающей поверхности (например, поверхности 114), может возникнуть по существу радиальное отклонение в результате центробежного нагружения, которое пропорционально массе, геометрии (например, диаметру) и частоте вращения. Если ротор/вал ротора выполнен из обычного материала, а диаметр лопастей 78 ротора больше диаметра вала ротора, лопасти 78 ротора могут испытывать большее (по существу) радиальное отклонение относительно ограничителей 277. На Фиг. 143-148 и на Фиг. 103В показано, что гибридные подшипники 137А вала ведомого ротора для такого примера могут быть выполнены с возможностью самокомпенсации таким же образом, как когда зазор 645А у площадок 291/287 кармана 285 подшипника уменьшен по сравнению с зазором 647А у соответствующего ограничителя. Аналогичным образом, на Фиг. 103В и 103Е показано, что (задние) гибридные упорные подшипники 139А ведомого ротора выполнены с возможностью самокомпенсации всякий раз, когда зазор 649А у площадок кармана подшипника уменьшен по сравнению с зазором 651А у соответствующего ограничителя. Если кольцо 37А/37В (Фиг. 103) содержит выступающую часть 35А/35В, центробежное нагружение может привести к отклонению данной части радиально наружу и аксиально назад, под действием которого происходит раздвижение зубьев шестерен. Данный эффект также обеспечивает возможность самокомпенсации в случае аксиального теплового расширения вала ведомого ротора и кольца 37А относительно фланца 621А ведомого ротора. Так как размер зазоров 643, 647 и 651 у ограничителя возрастает по мере уменьшения зазоров 641, 645 и 649 у карманов под действием ожидаемых нагрузок, в том числе - теплового расширения и центробежного нагружения, о которых шла речь, отклонение, которое может быть нужно для реагирования на такую же нагрузку, может быть меньше, чем в ранее раскрытых примерах с капиллярным питанием.
[0086] В одном примере вал 65 ведущего ротора на Фиг. 103 по существу аналогичен валу 41 ведомого ротора с неподвижным компонентом (не показан), аналогичным/эквивалентным корпусу 181 скользящей заслонки, образующим небольшие зазоры (не показаны) с ограничителями у внутреннего диаметра отверстия для вала ведущего ротора. Внутренний поворотный компонент (не показан) может быть выполнен с возможностью пригонки к внутреннему диаметру неподвижного компонента, например, корпуса 55), что по существу эквивалентно по структуре и функции конфигурации основной заслонки 171 внутри корпуса 181 скользящей заслонки. Внутренний поворотный (вал) компонент может быть выполнен с возможностью передачи крутящего момента валу 65 ведущего ротора через шлицевое соединение. В другом примере эти компоненты скреплены болтами или иными способами и устройствами.
[0087] В примере Е на Фиг. 103-103Е и Фиг. 137-142 зазоры 645В у площадок кармана подшипника вала ведущего ротора могут быть по существу эквивалентны зазорам 643В у ограничителей 277 вала ведущего ротора. В одном примере самокомпенсация теплового расширения или центробежного нагружения может быть небольшой или отсутствовать. В таком примере, когда происходит уменьшение (или увеличение, в случае термического сжатия) площадок 645В кармана подшипника и площадок 643В ограничителя на по существу эквивалентные величины, изменения давлений в карманах подшипника (и ограничителей) могут по существу отсутствовать. Такое отсутствие самокомпенсации может не быть причиной для беспокойства в некоторых случаях применения, где отклонения составляют малую долю высоты зазора в нейтральном положении. Практический способ минимизации таких отклонений состоит в минимизации диаметра вала. Если тепловое расширение и/или центробежное нагружение вызывают только уменьшение кармана подшипника на величину, большую, чем зазор, может иметь место эффект самокомпенсации в отношении таких нагрузок. Например, зазоры 641В у карманов подшипника ведущего ротора изображены на Фиг. 103 и Фиг. 103 и с диаметром, большим, чем зазоры 643В (Фиг. 103А) у ограничителей ведущего ротора на валу ведущего ротора. В данном примере можно ожидать, что будет иметь место эффект самокомпенсации в отношении указанных нагрузок. На Фиг. 103 и Фиг. 103А показано, что диаметр зазоров 645В у карманов подшипника вала ведущего ротора по существу равен диаметру зазоров 647В для соответствующих ограничителей вала ведущего ротора, в связи с чем не ожидают, что будет происходить самокомпенсация теплового расширения или центробежного нагружения. При этом все же возможна самокомпенсация чередующихся противоположных ограничителей и карманов подшипника, расположенных на диаметрально противоположных сторонах вала ведущего ротора, в отношении нагрузок, под действием которых может происходить смещение вала (например, вызванное давлением от сжатия или расширения газа в камере).
[0088] В одном примере ограничители 277 подшипника ведущего ротора и ограничители 277 подшипника вала ведущего ротора (см. соответствующие зазоры 643В/647В на Фиг. 103А) расположены на тыльной стороне подшипников 285 вала ведущего ротора (см. соответствующие зазоры 645В). В одном примере размер вала ведущего ротора может быть меньше по сравнению с диаметром в месте расположения (тыльного) ограничителя на Фиг.
[0089] Эквивалентную опорную втулку 625В можно модифицировать для образования по существу небольших зазоров 647 или применить дополнительную опорную втулку или относительно неподвижный компонент для образования по существу небольших зазоров, например, 647В для ограничителей подшипника вала ведущего ротора. Подшипники ведущего ротора и подшипники вала ведущего ротора могут быть необязательно выполнены с возможностью компенсации теплового расширения, центробежного нагружения и вызванных давлением нагрузок от камер.
[0090] В одном примере давление и поток через карман 285 подшипника регулируют посредством примыкающих зазоров 645, примыкающего напорного слива(-ов), зазоров ограничителя и давления подачи в непосредственной близости, в результате чего давление в кармане подшипника лежит в диапазоне от давления слива до давления подачи. В одном примере, если поток из кармана подшипника по существу ограничен по сравнению с потоком в карман, давление может быть ближе к давлению подачи, чем к давлению слива. Давление, воздействующее на зону кармана подшипника в данном примере, оказывает сопротивление нагрузке до тех пор, пока компонент не перестанет перемещаться в сторону примыкающего неподвижного компонента. Гидравлическое сопротивление может в первую очередь зависеть от высот зазоров, поэтому наиболее простой путь к пониманию работы подшипников состоит в том, чтобы сосредоточить внимание на изменении высот зазоров у карманов подшипника и у ограничителей, когда происходит смещение и/или отклонение детали.
[0091] В примере Н гибридных опорных подшипников ведомого ротора на Фиг. 103-103Е и Фиг. 143-148, (высоконапорный) питающий канал(-ы) 397HI для ведомого ротора 41 связан по текучей среде с питающим углублением 275HI через поверхность, ограничивающую полость 398EF, поверхность, ограничивающую отверстия 395EF, и канавки 396EF. Может быть создано множество отверстий 395EF. Существенное проходное сечение в полости 398EF и канавках 396EF выполнено с возможностью минимизации потерь давления между высоконапорным питающим каналом 397HI и питающим углублением 275HI, где давление в кармане подшипника может не превышать давление выше по потоку. Способность воспринимать нагрузки может зависеть от давления в питающем углублении 275HI, а не от давления в питающем канале 397HI. Сливы 289HIL и 289HIR выполнены с возможностью регулирования утечки текучей среды из питающего углубления 275HI. Если рабочая текучая среда (среда, подлежащая перекачке, сжатию, расширению) находится в непосредственной близости от слива 289HIR и под более низким давлением, чем питающее углубление 275HI, то текучая среда подшипника (текучая среда в подшипниках для уменьшения трения между движущимися компонентами) может утекать (нежелательный поток) в рабочую текучую среду, одновременно предотвращая утечку рабочей текучей среды в подшипники. Поток текучей среды подшипника в канал 609НА' текучей среды (прочие не обозначены) регулируют посредством ограничительной площадки 272НА до его поступления в карман 285НА' подшипника. Промежуточные площадки 291HA'L и 291HA'R выполнены с возможностью разделения примыкающих карманов подшипника, причем градиент давлений в этих карманы подшипника может быть по существу разным. Сливы 287HL и 287HR регулируют утечку текучей среды из карманов подшипника.
[0092] На Фиг. 103-103Е и Фиг. 143-148 также раскрыт пример I гибридных подшипников ведомого ротора. Поток из зоны 275HI подачи в канал 609IA' текучей среды регулируют посредством ограничительной площадки 272IA перед его поступлением в карман 285IA' подшипника. Промежуточная площадка 291IA'L разделяет примыкающие карманы подшипника ротора. Сливы 287IL и 287IR регулируют утечку текучей среды из кармана 285IA' подшипника.
[0093] Фиг. 103-103Е и Фиг. 143-148 иллюстрируют пример J гибридных упорных подшипников 139А вала ведомого ротора, могущих воспринимать нагрузки, параллельные оси 637 вала ведомого ротора. Способность воспринимать нагрузки, параллельные оси 637 вала ведомого ротора, для того или иного давления подачи в одном примере пропорциональна площади поверхности проекции карманов подшипника, перпендикулярной указанной оси вала. Поэтому максимальная поверхность проекции включает в себя карманы, радиально перпендикулярные оси 637 вала ведомого ротора. Если множество карманов 285 подшипника выполнено, как раскрыто, задний/передний упорный подшипник 139А/139В/129А/129В вала ведомого или ведущего ротора может быть выполнен с возможностью восприятия нагрузок, параллельных, но не колинеарных осям 637/639 ведомого/ведущего валов 41/65. Данные нагрузки в настоящем описании именуются «изгибные нагрузки» в том смысле, что они не параллельны оси вала. Следует понимать, что сокращенное название «гибридные упорные подшипники вала ведомого ротора» не означает, что они не будут воспринимать изгибные нагрузки. Высоконапорный питающий канал 397J для примера J гибридного упорного подшипника вала ведомого ротора в данном примере связан по текучей среде с питающим углублением 275J. Сливы 289JL и 289JR регулируют утечку текучей среды, выходящей из питающего углубления 275J. Поток в канал 609JA' текучей среды (прочие не обозначены) в данном примере регулируют посредством ограничительной площадки 272JA перед поступлением в карман 285JA' подшипника. Промежуточные площадки 291JA'L и 291JA'R разделяют примыкающие карманы 285 подшипника, в связи с чем градиент давлений в этих карманы подшипника может быть по существу разным. Сливы 287JL и 287JR регулируют утечку текучей среды из карманов 285 подшипника.
[0094] Камера(-ы) 144 сжатия в данном примере непосредственно примыкают к сливу 287IR (пример I подшипника ведомого ротора на Фиг. 147) и сливу 289JL (пример J гибридного упорного подшипника вала ведомого ротора). Если давление текучей среды подшипника в углубленном питающем углублении 275J примера J гибридного упорного подшипника вала ведомого ротора выше максимального давления камеры 144 сжатия, текучая среда подшипника из углубленных карманов 285I (А' - I') подшипника ведомого ротора может течь в сторону камеры 144 сжатия. Это может быть желательным, так как жидкостный барьер может предотвращать связь по текучей среде рабочей текучей среды примыкающих камер у места расположения подшипника. Может быть желательно минимизировать миграцию рабочей текучей среды из камеры более высокого давления в камеру более низкого давления для улучшения объемной производительности/КПД. Так может происходить утечка используемой для подшипников текучей среды подшипника в рабочую текучую среду. При этом предполагают, что давление в высоконапорном питающем канале 397HI примера I гибридного подшипника ведомого ротора будет выше максимального давления в камере сжатия для того, чтобы подшипник мог функционировать, поскольку ожидают, что давления в кармане подшипника упадут до значения в диапазоне от самого низкого давления слива до давления подачи. В одном примере давление у питающего углубления 275J примера J гибридного упорного подшипника ведомого ротора может превышать давление высоконапорного питающего канала 397HI примера I гибридного подшипника ведомого ротора, по существу не влияя на давление в кармане 285IA' подшипника ведомого ротора, где гидравлическое сопротивление у слива 289JL и/или слива 287IL по существу выше гидравлического сопротивления у слива 287IR. Могут быть внесены мелкие корректировки, например, может быть выполнена регулируемая по давлению полость, непосредственно примыкающая к сливу 287IL. Данный альтернативный вариант может быть желателен в случаях применения, где невозможно или трудно сделать так, чтобы гидравлическое сопротивление у слива 289JL и слива 287IL было по существу выше, чем у слива 287IR, а давление в высоконапорном питающем канале 397HI ведомого ротора по существу не выше давления в питающем углублении 275J примера J гибридного упорного подшипника ведомого ротора.
[0095] Один или более каналов 613 текучей среды могут быть выполнены с возможностью подачи высоконапорной текучей среды в углубление 99' выпуклой усеченно-сферической поверхности 99 вставки 91 ведомого ротора на Фиг. 143-148. Указанные канал(-ы) текучей среды может питать кольцевая канавка 615, связанная по текучей среде с каналом 161 текучей среды (Фиг. 111-114) корпуса 55В. Текучая среда подшипника, охлаждающая среда или иная «уплотняющая» текучая среда, обтекающая выпуклую усеченно-сферическую поверхность 99, может поступать в камеру 144, в связи с чем может быть желательно изолировать камеры 144 от примыкающих камер с другим давлением и обеспечить охлаждение/нагрев при сжатии/расширение. Может быть желательно, чтобы давление потока, достигающего вогнутой усеченно-сферической поверхности 99, было выше максимального давления в камере, которое может быть по существу аналогично, но выше давления в выпускной камере 669 (Фиг. 103), для обеспечения принудительного потока в камеры и указанной изоляции. Максимальное давление в камере определяют как наибольшее давление, возможное за счет положения основной заслонки 170 в сочетании с объемной производительностью и частотой вращения. Когда положение основной заслонки 170 является оптимальным, можно минимизировать мощность от привода, так как ранее или более позднее открытие камеры может увеличить потребности в мощности от привода. Градиент давлений, нужный для выхода рабочей текучей среды из камеры, может зависеть от объемной производительности, плотности рабочей текучей среды (например, давления и состава рабочей текучей среды) и располагаемый интервал времени (например, частоты вращения ведущего ротора). Например, чем выше давление на впуске, тем выше может быть объемная производительность. При более высоких давлениях в выпускной камере 669 может быть нужно, чтобы плотность рабочей текучей среды во время выхода была относительно высокой. Чем выше частота вращения, тем меньше может быть располагаемое время. Таким образом, сочетание высокого давления на впуске, высокого давления в выпускной камере 669 и высокой частоты вращения роторов может определять максимальное давление в камере, при этом для вытеснения рабочей текучей среды в располагаемый интервал времени может быть нужен высокий градиент давлений между камерой 144 и выпускной камерой 669. Давление в выпускной камере 669 может быть по существу аналогично, но выше давления в расположенной ниже по потоку сборной системе (не показана), при этом для побуждения рабочей текучей среды к выходу из ротационной машины 20 может быть нужен положительный градиент давлений. Давление в канавке 615 может быть ниже, выше или равно давлению в питающем углублении 275HI. Площадка 289HIL может создавать гидравлическое сопротивление между канавкой 615 и питающим углублением 275HI. Может быть желательно, чтобы гидравлическое сопротивление у площадки 289HIL и сливной площадки 653 было по существу выше гидравлического сопротивления у выпуклой усеченно-сферической поверхности 99, если желательно более близкое соответствие измеренных значений давления за пределами компрессора давлению, которое может быть получено в углублении 99'.
[0096] Регулирование указанного давления текучей среды может быть выполнено с возможностью оптимизации показателей работы подшипника для разных комбинаций давлений на впуске и на выпуске. Давление текучей среды может создавать аксиальную нагрузку по осям 637/639 соответствующих валов ведомого/ведущего роторов (Фиг. 103). Поэтому при отсутствии вызванных высоким давлением в газовой камере аксиальных нагрузок, давление у углубления 99' можно соответственно повысить. Так можно уменьшить изменчивость нагрузок и, тем самым, минимизировать смещение гибридных упорных подшипников (139А, 139В, 129А и/или 129В на Фиг. 103) ведомого/ведущего ротора из нейтрального положения, что, в свою очередь, позволит уменьшить вязкое сопротивление/мощность от привода. Давление подачи на впуске в отверстия 397HI можно регулировать так, чтобы возникающее в результате давление у углубления 99' находилось в диапазоне от давления подачи рабочей текучей среды до давления на выпуске рабочей текучей среды. Давление на впуске в отверстия 397HI можно регулировать до достижения минимальной мощности от привода. В другом примере уравнение первой степени можно записать в программном коде и хранить его на энергонезависимом носителе (в цифровом файле) для применения в системе управления, содержащей уравнение соотношения с давлениями на впуске и выпуске.
[0097] Текучая среда из сливов 287JL и 287HR может быть связана по текучей среде с полостью 445 шестерни (Фиг. 111) через отверстия 449J в кольце 37А ведомого ротора. Текучая среда из сливов 287JR и 289JR может поступать в непосредственно примыкающую полость 445 шестерни. Текучая среда из сливов 287HL и 653 может быть связанна по текучей среде с полостью 445 шестерни через отверстия 451HN (Фиг. 110). Слив текучей среды в полости 445 шестерни может происходить через отверстия 447 в расположенную ниже по потоку систему сбора текучей среды/маслосборник (не показан).
[0098] В примере Е гибридных опорных подшипников ведущего ротора на Фиг. 103-103Е и Фиг. 137-142, (высоконапорный) питающий канал 397EF для ведущего ротора связан по текучей среде с питающим углублением 275EF. Сливы 289EFL и 289EFR регулируют утечку текучей среды, выходящей из питающего углубления 275EF в полость 445 шестерни по канавке 456EK' и через отверстия 453EK, 451EK' и 451EK (Фиг. 109) и отверстия 449G в кольце 37В. Поток в канал текучей среды 609ЕА' и т.д. регулируют посредством ограничительной площадки 272ЕА, после чего он течет в карман 285ЕА' подшипника. Промежуточные площадки 291EA'L и 291EA'R разделяют примыкающие карманы подшипника, выполненные с возможностью по существу разного градиента давлений в них. Сливы 287EL и 287ER регулируют утечку текучей среды из карманов подшипника. На Фиг. 103-103Е и Фиг. 137-142 также раскрыт пример F гибридных подшипников ведущего ротора. Ограничительная площадка 272FA может регулировать поток из питающего отверстия 275EF в канал текучей среды 609FA', который далее поступает в карман 285FA' подшипника. Промежуточная площадка 291FA'L разделяет примыкающие карманы подшипника ротора. Сливы 287FL, 287FR и 291FA'R регулируют утечку текучей среды из кармана 285FA' подшипника.
[0099] Фиг. 103-103Е и Фиг. 137-142 иллюстрируют пример G гибридных упорных подшипников ведущего ротора, выполненных с возможностью восприятия нагрузок, параллельных оси 639 вала ведущего ротора. Способность воспринимать нагрузки, параллельные оси 639 вала ведущего ротора, для того или иного давления подачи пропорциональна площади поверхности проекции карманов подшипника, перпендикулярной указанной оси вала. Таким образом, максимальная площадь поверхности проекции включает в себя карманы, перпендикулярные оси 639 вала ведущего ротора. Если множество карманов подшипника выполнено, как раскрыто, гибридный упорный подшипник 139В ведущего ротора может быть выполнен с возможностью восприятия нагрузок, параллельных, но не колинеарных оси вала 65. Данные нагрузки в настоящем описании именуются «изгибные нагрузки» в том смысле, что они не параллельны валу. Следует понимать, что сокращенное название «гибридные упорные подшипники ведущего ротора» не означает, что они не будут воспринимать изгибные нагрузки. Высоконапорный питающий канал 397G для примера G гибридного упорного подшипника ведущего ротора связан по текучей среде с питающим углублением 275G. Сливы 289GL и 289GR выполнены с возможностью регулирования утечки текучей среды, выходящей из питающего углубления 275G. Поток в канал 609GA' текучей среды (прочие не обозначены) регулируют посредством ограничительной площадки 272GA, после чего он течет в карман 285GA' подшипника. Промежуточные площадки 291GA'L и 291GA'R разделяют примыкающие карманы подшипника, выполненные с возможностью по существу разного градиента давлений в них. Сливы 287GL и 287GR регулируют утечку текучей среды из карманов подшипника.
[00100] Камера(-ы) 144 сжатия в одном примере непосредственно примыкают к углублению 79А'. Углубление 79А' содержит поверхности, ограниченные площадками 287FR, 79A'L и 79A'R. В одном примере данная область состоит из площадки 287FR. Углубление 79А выполнено с возможностью периодической связи по текучей среде с основными/вспомогательными впускными проходами 191/193 на Фиг. 105-108В. Вспомогательные впускные проходы 191/193 в одном примере могут не быть предпочтительны для подачи в углубление 79А', так как высоты зазоров могут периодически становиться по существу большими, в связи с чем могут быть нужны существенные расходы потока. Может быть предпочтительнее выполнить углубление 79А', а не задействовать всю область части площадки 287FR, так как это позволяет по существу уменьшить вязкое сопротивление трения. Мгновенное давление в углублении 79А' можно рассчитать так же, как раскрыто выше по аналогии с электрической схемой, по гидравлическим сопротивлениям у площадок и граничным условиям давления. В одном примере, где углубление 79А связано по текучей среде с основными/вспомогательными впускными проходами 191/193, давление может быть по существу эквивалентно давлению на впуске. Камера(-ы) 144 сжатия непосредственно примыкают к углублению 79А' (непосредственно примыкающему к сливу 287FR в примере F подшипника ведущего ротора) и сливу 289GL (пример G гибридного упорного подшипника ведущего ротора). Если давление в питающем углублении 275G в примере G гибридного упорного подшипника ведущего ротора выше максимального давления в камере сжатия, то текучая среда из углубленных карманов 285F(A'-I') подшипника ведущего ротора может течь в сторону камеры 144 сжатия. Это может быть желательным, так как жидкостный барьер может предотвращать связь по текучей среде (утечку) рабочей текучей среды из примыкающих камер у места расположения подшипника. Может быть желательно минимизировать миграцию рабочей текучей среды из камеры более высокого давления в камеру более низкого давления для улучшения объемной производительности/КПД. Так может происходить утечка используемой для подшипников текучей среды подшипника в рабочую текучую среду. В одном примере высоконапорный питающий канал 397EF примера F гибридного подшипника ведущего ротора находится под давлением выше максимального давления в камере сжатия (т.е. в одном примере максимальное давление в камере выше давления в выпускной камере 669, но по существу аналогично ему) для того, чтобы подшипник мог функционировать, поскольку ожидают, что давления в кармане подшипника упадут до значения в диапазоне от самого низкого давления слива до давления подачи. Тем, кто будет выполнять расчет по раскрытому здесь способу, может быть понятно, что давление у питающего углубления 275G в примере G гибридного упорного подшипника ведущего ротора может быть выше, чем в высоконапорном питающий канале 397EF примера F гибридного подшипника ведущего ротора, по существу не влияя на давление в кармане 285FA' подшипника ведущего ротора, если гидравлическое сопротивление у слива 289GL и/или слива 287FL по существу выше эквивалентного гидравлического сопротивления у слива 287FR, рассчитанного как последовательное сопротивление относительно параллельных сопротивлений у площадок 79А'L/79A'R. Могут быть внесены мелкие корректировки, например, может быть выполнена регулируемая по давлению полость, непосредственно примыкающая к сливу 287FL. Данное альтернативное решение может быть желательно в примерах, где невозможно увеличить гидравлическое сопротивление у слива 289GL и слива 287FL, чтобы оно по существу превысило эквивалентное гидравлическое сопротивление, речь о котором шла выше (т.е. у слива 287FR с площадками 79A'L/79AR), при этом давление в высоконапорном питающем канале 397EF ведущего ротора по существу не выше давления в питающем углублении 275G примера G гибридного упорного подшипника ведущего ротора.
[00101] Текучая среда из слива 289EFR (Фиг. 137) и 287GL (Фиг. 139) может быть связана по текучей среде с полостью 445 шестерни (Фиг. 111) через отверстия 449G в кольце 37В ведущего ротора. Текучая среда из сливов 287GR и 289GR может поступать в непосредственно примыкающую полость 445 шестерни. Текучая среда из слива 287EL может быть связана по текучей среде с полостью шестерни через отверстия 451EK (Фиг. 109). Текучая среда из слива 287ER и слива 289EFL может быть связана по текучей среде с полостью 445 шестерни по канавке 453EK', через отверстия 453EK' и отверстия 451EK соответственно. Канавка 453EK' (Фиг. 137) и расположенные ниже по потоку отверстия могут быть по размеру выполнены в соответствии с ожидаемым потоком для уменьшения градиента давлений, так как может быть желательно, чтобы давление слива было ниже в области, примыкающей к карману подшипника, для увеличения способности воспринимать нагрузки. Слив текучей среды в полости 445 шестерни может происходить через отверстия 447.
[00102] В одном примере весьма схематичные примеры гибридных подшипников (Фиг. 72А) были применены в примерах F, G, Н, I, J, а весьма схематичный пример Т гибридного подшипника (Фиг. 72В) - в примере Е. В примерах I/F гибридных подшипников ведомого/ведущего ротора ограничители и карманы подшипника диаметрально смещены и расположены соответственно на цилиндрических/усеченно-сферических поверхностях разной топологии. Было раскрыто, что карманы подшипника ротора, например, карман 285FA' на Фиг. 141, находятся под высоким давлением вблизи одной из площадок, например, 287FL. Это также соответствует сущности весьма схематичных примеров гибридных подшипников (Фиг. 72А), так как имеется по меньшей мере одна площадка, откуда возможен слив текучей среды подшипника.
[00103] В примере ротационной машины 20 на Фиг. 150, 151 изображены примеры гибридных подшипников с К по Р (Фиг. 152-163). Каналы 609 K, L, М, N, О, Р текучей среды эквивалентны каналам 609 Е, F, G, Н, I, J текучей среды соответственно. Следует понимать, что соответствующие питающие углубления, ограничители и карманы подшипника также эквиваленты, поэтому, чтобы упростить понимание читателем, здесь раскрыты только различия между ними. Весьма схематичный пример U подшипника на Фиг. 149 применен в примере К гибридного подшипника вала ведущего ротора (Фиг. 152-157). В данном примере не применена канавка 453EK' (т.е. слив более низкого давления на Фиг. 137) между ограничителями и карманами подшипника. Комбинация площадок 287ER и 289EFL обозначена как площадка 611К на Фиг. 152. Слив 289EFR на Фиг. 137 не применен в данном примере, в котором питающее углубление 275EF на Фиг. 137 проходит в питающее углубление 275KL на Фиг. 152. На Фиг. 152-157 показано, что питающее углубление 275KL связано по текучей среде с питающим углублением 275М (Фиг. 156) через отверстия 395М. Поэтому давление в непосредственной близости от площадки 287ML может быть по существу эквивалентно давлению в питающем углублении 275KL и 275ML. На Фиг. 151 показано, что подача в полость 396KLM у питающего углубления 275KL может происходить через отверстия 397KLM на стороне ведущего ротора. Сторона ведомого ротора в данном примере содержит полость 396NOP, подача в которую происходит через отверстия 397NOP. На Фиг. 150, 151 и Фиг. 158-163 показано, что полость 396NOP связана по текучей среде через отверстия 395NO в ведомом роторе 41' и отверстия 395Р в кольце 37А' ведомого ротора, за счет чего высоконапорная текучая среда подшипника поступает в питающие углубления 275NO и 275Р соответственно. В одном примере на Фиг. 150, 151 подача в подшипники происходит из полости 397NOP и отверстий 397KLM (связанных с ними по текучей среде). Опорные втулки 625А'/625В' ведомого/ведущего роторов могут быть выполнены укороченными для создания полостей 396NOP/396KLM. Опорная втулка ведомого ротора в обоих примерах 625А/625А' не содержит питающих или сливных отверстий. В примере на Фиг. 150, 151 опорная втулка 625В' ведущего ротора уже не содержит питающие отверстия (например, 395EF на Фиг. 103А) или сливные отверстия (например, 453EK на Фиг. 109). Сливы 451EK (Фиг. 109) и 451HN (Фиг. 110) и сливы 447 полости шестерни (Фиг. 11) могут все же быть нужны для площадок 287KL, 287NL и 653. Слив с площадок 289PR, 287PR, 287MR и 289MR может происходить в непосредственно примыкающую полость шестерни, как и в предыдущих примерах.
[00104] Общее питающее углубление, например 275EF (Фиг. 137) или 275HI (Фиг. 145), образует канал текучей среды к площадкам 272ЕА, 272FA, 272НА и 272IA ограничителя соответственно. Это обеспечивает возможность более компактной конфигурации, чем в других примерах. В одном примере высоконапорное питающее углубление выполнено непосредственно примыкающим к площадкам ограничителя. Ограничители могли бы содержать индивидуальные питающие канавки. Давление в индивидуальных питающих канавках могло бы быть разным, что предпочтительно в некоторых случаях в зависимости, например, от поверхности проекции карманов подшипника и ожидаемых нагрузок.
[00105] Болтовые отверстия 457А/457В в кольцах 39А/39В ведомого/ведущего роторов на Фиг. 145 и 139 и Фиг. 103D-103Е выполнены с возможностью выравнивания по одной линии с болтовыми отверстиями 455А/455В в ведомом/ведущем роторах 28В/76В для прочного прикрепления колец 37А/37В к соответствующим роторам 28В/76В. Это один пример способа прикрепления колец 37А/37В к соответствующим роторам 28В/76В. Головки болтов в углубленных карманах подшипника могут создавать турбулентность и, тем самым, увеличивать образование тепла. В качестве альтернативы, углубленный карман подшипника можно было бы переместить радиально наружу относительно оси вращения ротора к большему диаметру, чтобы болты не находились в кармане, однако возросшее трение из-за вязкого сопротивления было бы менее желательным. Это также позволяет создать более компактную конфигурацию, чем в других примерах.
[00106] В одном примере по существу прямоугольные канавки могут быть выполнены по существу по форме эллипса, круга, многоугольника и в иной форме, так как функционирование ограничителей зависит от периметра формы, окружающей канавку, и ее ширины. Аналогичным образом, периметр углубленных карманов подшипника может иметь самые разные формы, при этом они могут быть расположены на поверхностях разной топологии, как в некоторых приведенных примерах, таких как карманы 285FA подшипника (Фиг. 141) и 285IA' (Фиг. 148) ротора.
Регулирование зазоров подшипника - Пример В
[00107] Площадки ограничителя, например 272НА и 272IA (Фиг. 145), и площадка 272ЕА ограничителя (Фиг. 137) были показаны на цилиндрических поверхностях. В других примерах желательно, чтобы поверхность была конусовидной (усеченно-конической) для создания желаемых высот зазоров во время сборки. С конусами может быть легче работать в некоторых случаях применения, где высоту зазора можно легко измерить, а компонент содержит минимальное количество поверхностей с жесткими допусками. В примере на Фиг. 102-103, где опорные втулки 137А/ 137В отсутствуют, фланцы 621А/621В ведомого/ведущего роторов можно продлить радиально вовнутрь с образованием зазоров подшипников у подшипников 137А/137В вала ведомого/ведущего ротора. Внутренняя поверхность может быть усеченно-конической с настолько малым углом, что она может быть почти цилиндрической. Валы 41/65 ведомого/ведущего роторов в одном примере имеют по существу идентичную топологию поверхности, а элементы подшипников могут быть по существу идентичны изображенным на Фиг. 137-148. В таком примере аксиальное положение фланцев 621А/621В ведомого/ведущего роторов относительно осей 637/639 может определять высоту зазора у подшипников 137А/137В конусовидного вала. Аксиальное положение в одном примере может нежелательно увеличить или уменьшить высоту зазора у планарных упорных подшипников 139А/139В. Может быть нужен способ независимого регулирования для создания/регулирования высот зазоров подшипника в процессе сборки, как раскрыто ниже. Опорные втулки 625А/625В ведомого/ведущего роторов обеспечивают возможность независимого регулирования высот зазоров подшипника, за счет того, что большие первые шайбы 619А/619В могут быть по размеру выполнены с возможностью создания желаемого зазора у подшипников 139А/139В, когда фланцы 621А/621В ведомого/ведущего роторов прикреплены к корпусам 617А/617В ведомого/ведущего роторов. Малые вторые шайбы 623А/623В могут быть по размеру выполнены так, что, когда опорные втулки 625А/625В прикреплены к фланцам 621А/621В ведомого/ведущего роторов, конусовидные поверхности 633А и 635А на стороне ведомого ротора и конусовидные поверхности 633В и 635В на стороне ведущего ротора могут влиять на соответствующие высоты зазоров 645А (Фиг. 103В) и 645В (Фиг. 103А) у подшипников 137А/137В валов ведомого/ведущего роторов. Таким образом, опорные втулки 625А/625В можно прикрепить к фланцам 621А/621В ведомого/ведущего роторов крепежными элементами, например, болтами, с возможностью затяжки крепежных элементов до желаемого нормативного момента, так как регулирование зазоров может зависеть больше от размера шайбы, а не от варьирования затяжки, создаваемой способом крепления, в соответствующих случаях. Ввод двух конусовидных поверхностей в зацепление, как показано, создает усилие зажатия на части у внутреннего диаметра компонентов (например, конусе Морзе). Опорные втулки 625А/625В могут быть выполнены менее массивными (меньше по размеру и весу), чем фланцы 621А/621В ведомого/ведущего роторов, что позволяет значительно упростить сборку в части плотной посадки компонентов на соответствующие валы 41/65 ведомого/ведущего роторов. Кроме того, регулируемый характер втулок подшипников обеспечивает возможность тонкой регулировки зазоров для подшипников 137А/137В валов ведомого/ведущего роторов. На Фиг. 103А-103В показано, что угол конусности А/А и толщина С/С у более тонкого конца могут быть основными параметрами, влияющими на диапазон нужных регулировок малых вторых шайб 623А/623В. Для оценки радиального отклонения, ожидаемого в связи аксиальными регулировками втулок 625А/625В подшипников, можно выполнить конечно-элементный анализ или расчет иными известными способами. В зависимости от результатов конечно-элементных анализов или расчетов иными способами, радиальное отклонение может не быть равномерным вблизи шайб (т.е. вблизи фланцев втулок подшипников). Например, результаты могут указывать на то, что может иметь место по существу равномерное радиальное отклонение части втулок 625А/625В подшипников, образующей зазоры 643А, 643В, 645А, 645В, 647А и 647В, в связи с аксиальными регулировками, и на то, что данная область может отстоять на расстояние В/В' от конца конического зацепления 635А/633А и 635В/633В. Равномерная высота зазора для ограничителей и карманов подшипника может быть желательна для обеспечения возможности достижения ограничителем или карманом подшипника давления, близкого к давлению слива или давлению подачи без соприкосновения металлов. Возможно уменьшение максимальной несущей способности подшипника (в случае предотвращения соприкосновения металлов), если высоты зазоров у ограничителя или площадок подшипника не будут равномерными в нейтральном положении.
Подача текучей среды в самокомпенсирующиеся гибридные подшипники без капиллярного питания с противоположными ограничителями и карманами подшипника
[00108] Как раскрыто выше, примеры гибридных подшипников с диаметрально противоположными ограничителями и карманами подшипника выполнены с возможностью применения в примерах на Фиг. 102, 103, где высоконапорная текучая среда подшипника может поступать в компрессор по питающим линиям 397HI, 397EF, 397J и 397G. Примеры К-Р гибридных подшипников применимы к вариантам на Фиг. 150-151, где высоконапорная текучая среда подшипника может поступать в компрессор по питающим линиям 397NOP и 397KLM.
Сборка ротационной машины - Пример А
[00109] Ротационная машина 20, раскрытая в нескольких примерах, имеет ряд отличий от известных машин. В примере «А» на Фиг. 1-22 ротационная машина 20 имеет более широкий рабочий диапазон, меньшее количество частей, меньший размер и меньший вес, чем известные примеры машин с эквивалентными характеристиками расхода потока (объема) текучей среды. Следует понимать, что полный КПД ротационной машины 20 может быть выше, а стоимость ее техобслуживания - ниже, чем у известных машин, при сравнении сценариев со средним и высоким расходом потока (объемом) текучей среды в пределах рабочего диапазона.
[00110] В примере «А» на Фиг. 1-22 ротационная машина 20 содержит подузел 22 ведомого ротора и подузел 24 ведущего ротора. В одном примере подузел 22 ведомого ротора и подузел 24 ведущего ротора собирают по отдельности, а затем соединяют вместе с корпусом 55А, включающим в себя основание 58 корпуса и крышку 56 корпуса, с образованием ротационной машины 20. В данном примере ротационная машина 20 содержит обод 26 ведомого ротора (Фиг. 8В), прикрепленный к ведомому ротору 28. В одном примере обод 26 ведомого ротора (Фиг. 8В) прикрепляют к ведомому ротору посредством соединения в натяг, крепежных элементов, пайки твердым припоем, сварки или иных подходящих способов крепления или крепежных элементов.
[00111] Обод 26 ведомого ротора в одном примере содержит поверхности, ограничивающие отверстия 196, расположенные по одной линии с каждой впадиной 82 ведомого ротора. Отверстия 196 в ободе 26 ведомого ротора образуют другую форму и меньшую окружную длину (см. Фиг. 18), чем проемы 675, образованные гранями ведомого/ведущего роторов (28/76) у краев усеченно-сферических поверхностей 114 (Фиг. 2). Форма обода обеспечивает возможность упрощения основных/вспомогательных заслонок 170/172 и выпускного уплотнения 200 на скользящем кольцевом уплотнении 30 (Фиг. 37). В одном примере меньшая окружная длина позволяет увеличить диапазон степеней сжатия, создаваемого ротационной машиной 20. Скользящее кольцевое уплотнение 30 и передний цилиндр 32 в одном примере прикреплены к корпусу 34 переднего подшипника ведомого ротора и выполнены с возможностью изменения положения вдоль вала 40 ведомого ротора вблизи наружных усеченно-сферических поверхностей 36 ведомого ротора, оставаясь по существу концентрическими по отношению к валу 40 ведомого ротора. Кольцо 38 в одном примере прикреплено к валу 40 ведомого ротора. Шаг резьбы 39 кольца сформирован (вырезан, проточен или отлит) относительно вращения вала так, что кольцо 38 остается плотно прижатым к площадке 66 (Фиг. 8В) вала 40 ведомого ротора во время вращения узла 20 ротора. В других примерах возможно применение других крепежных элементов или способов крепления. Возможно применение болта или иных крепежных элементы или способов крепления в качестве вспомогательных способов для сохранения затяжки кольца 38. Задний цилиндр 42 вставляют в корпус 44 заднего подшипника ведомого ротора, а корпус 44 заднего подшипника ведомого ротора прикрепляют к корпусу 34 переднего подшипника ведомого ротора посредством болтов или иных крепежных элементов или способов крепления. В примерах с обычным передним подшипником 46, сначала вставляют обычный передний подшипник 46, а затем - гидравлический узел 48 и обычный задний подшипник 50. Эти компоненты в одном примере фиксируют путем прикрепления заглушки 52 к корпусу 44 заднего подшипника ведомого ротора посредством болтов или иных крепежных элементов или способов крепления.
[00112] Впускную заслонку 54 прикрепляют к радиальному подшипнику ведущего ротора посредством штифтов или иных крепежных элементов или способов крепления. В качестве альтернативы, крышка 56 корпуса и основание 58 корпуса могут содержать поверхности указанной впускной заслонки 54. Как видно из примеров на Фиг. 33, 34, рабочая текучая среда поступает в компрессор через впускной патрубок 112, связанный по текучей среде с впускным проходом 186 и поверхностями впускной заслонки 54. Как видно из Фиг. 932, вращение впадин 82В ведущего ротора 76 происходит мимо неподвижных поверхностей впускной заслонки 54. Таким образом, как видно из Фиг. 11, поверхности впускной заслонки 54 могут изолировать камеру 144А между роторами после достижения положения максимального объема.
[00113] На Фиг. 2 показано, что передний цилиндр 32 прикреплен к корпусу 60 переднего подшипника ведущего ротора и выполнен с возможностью изменения положения линейно вблизи наружных усеченно-сферических поверхностей 62 ведущего ротора, оставаясь по существу концентрическим по отношению к валу 64 ведущего ротора. Кольцо 38 прикреплено к валу 64 ведущего ротора. Шаг резьбы 39 кольца сформирован (вырезан или отлит) относительно вращения вала так, что кольцо 38 остается плотно прижатым к площадке 68 вала ведущего ротора. В других примерах возможно применение других крепежных элементов или способов крепления. Возможно применение болта или аналогичного крепежного элемента в качестве вспомогательного средства обеспечения того, чтобы кольцо 38 оставалось плотно прижатым к площадке 68. В одном примере задний цилиндр 42 вставляют в корпус 70 заднего подшипника вала ведущего ротора, а корпус 70 заднего подшипника вала ведущего ротора прикрепляют к корпусу 60 переднего подшипника ведущего ротора посредством болтов, иных крепежных элементов или способов крепления. В примерах с обычным передним подшипником 46, сначала вставляют обычный передний подшипник 46, а затем распорную деталь 71 и, при его наличии, обычный задний подшипник 50. Эти компоненты можно зафиксировать путем прикрепления заглушки 52 к корпусу 70 заднего подшипника вала ведущего ротора посредством болтов или иных крепежных элементов или способов крепления. Применение съемного кольца 38 позволяет приспособить машину 20 к сплошной по окружности части, например, корпусу 60 переднего подшипника ведущего ротора между двумя радиальными элементами (т.е. наружными усеченно-сферическими поверхностями 62 ведущего ротора и кольцом 38). Может не быть желательно расчленять сплошную по окружности поверхность с жесткими допусками, образующую подшипник, например, поверхность радиального гибридного подшипника 72 ведущего ротора, так как может быть нужно, чтобы края у этой поверхности были острыми для минимизации или устранения любых эффектов расчленения. В примере на Фиг. 1, 2 основание 58 корпуса и крышка 56 корпуса имеют внутренние усеченно-сферические поверхности 114, предпочтительно выполненные с возможностью совмещения друг с другом с максимально возможной концентричностью, при этом их края у стыка должны быть острыми для минимизации утечки в по существу аксиальных направлениях валов 637/639. В другом примере компоненты изготавливают способами машинной обработки, например, трехмерной печати по металлу, обеспечивающими возможность построения роторов 28/76, как показано на фигурах, без каких-либо расчленений в компонентах корпуса. В одном примере можно снизить производственную себестоимость и улучшить качество отделки поверхностей за счет применения общедоступных (на сегодняшний день) способов изготовления, например, машинной обработки и шлифования. В примере на Фиг. 2-5 корпус 60 переднего подшипника ведущего ротора выполнен сплошным по окружности с образованием сплошной по окружности поверхности с жесткими допусками, входящей в состав радиального гибридного подшипника 72 ведущего ротора. Пространство внутри корпуса крайне ограничено и рассчитано на вмещение компонентов и проходов текучей среды (например, проходов текучей среды в гибридные подшипники), при этом обеспечена достаточная жесткость, а также удобство сборки и техобслуживания. Компоненты корпуса 55А или бандажа, примыкающие к роторам 28/76, могут быть выполнены так, чтобы не происходило их значительное отклонение под давлением. Более компактную конфигурацию по существу радиальных подшипников можно обеспечить за счет применения сплошных по окружности поверхностей/компонентов, например, корпуса 60 переднего подшипника ведущего ротора для радиального гибридного подшипника 72 ведущего ротора, так как отсутствие расчленения данного компонента позволяет обеспечить его дополнительную жесткость при том или ином размере. Указанное отклонение может ухудшить показатели пленки, образующейся между этими компонентами.
[00114] При применении делительной шестерни 677 на Фиг. 70А в варианте на Фиг. 2 возникали трудности в выборе подходящего конструктивного исполнения корпуса, так как поверхности, ограничивающие болтовые отверстия для крепления компонентов корпуса, не должны создавать помехи для делительной шестерни. В случае применения, не следует изменять положение обычных подшипников на валу 64 ведущего ротора и валу 40 ведомого ротора для выполнения работ по плановому техобслуживанию. Это зачастую желательно из-за жестких допусков, необходимых в местах расположения гибридных подшипников. Кроме того, тип и местоположение необязательных уплотнений, непосредственно примыкающих к крышке 56 корпуса, могут быть спроектированы с возможностью обратного прикрепления крышки 56 корпуса без нарушения целостности этих уплотнений. В одном примере оператор не повредит какие-либо уплотнения при снятии, проведении техобслуживания и обратной установке крышки 56 корпуса или иных компонентов корпуса 55А.
[00115] После того, как узел 24 ведущего ротора и узел 22 ведомого ротора будут собраны, в одном примере эти узлы не нужно будет разбирать в течение периода, по меньшей мере, превышающего интервалы планового техобслуживания, или даже в течение всего срока службы ротационной машины 20.
[00116] В примере на Фиг. 1-5 узел 24 ведущего ротора и узел 22 ведомого ротора можно прикрепить к основанию 58 корпуса посредством болтов или иных крепежных элементов или способов крепления. После того, как узел 22 ведомого ротора и узел 24 ведущего ротора будут прикреплены к основанию 58 корпуса, к основанию 58 корпуса можно прикрепить крышку 56 корпуса. Крышку 56 корпуса также можно прикрепить к узлу 22 ведомого ротора и узлу 24 ведущего ротора для уменьшения габаритного размера и веса ротационной машины 20, так как указанная конфигурация может обеспечивать большую жесткость. В одном примере корпус 74 обладает достаточной жесткостью по всей длине машины.
Примеры вставки роторов для сборки
[00117] В одном примере, для облегчения ввода ведомого ротора 38 и ведущего ротора 76 в надлежащее зацепление, как показано на Фиг. 5 и Фиг. 39-41, соответствующие лопасти 78 ротора могут аксиально охватывать больше половины окружности сферы. Лопасти 78 в одном примере выполнены с возможностью образования выступов 80, как раскрыто на Фиг. 8А-8В, а на Фиг. 39 изображены лопасти 78А/78В и впадины 82А/82В ведомого ротора 28 и ведущего ротора 76 соответственно. Следует понимать, что в одном примере ведущий ротор 76 может содержать лопасти 78В и впадины 82В, как раскрыто на Фиг. 39, с образованием, в одном примере, поверхности, по существу идентичной поверхности (грани) ведомого ротора 28. В одном примере минимальное расстояние между двумя противоположными лопастями 78 того или иного ротора может быть меньше диаметра радиально внутренней сферической поверхности 96А, могущей занимать указанное пространство (Фиг. 39-41).
[00118] Если ротационная машина 20 содержит однозаходные роторы, данной проблемы при сборке не будет существовать. В однозаходном примере нежелательными могут быть проблемы с балансировкой и уменьшение объемной производительности. Для обеспечения возможности сборки в случаях с поверхностями роторов, содержащими более одной лопасти 78, в известных конструкциях нужно было снимать напряжение на внутреннем диаметре лопастей 78 ротора. При этом удаление выступающего материала 80 поверхностей лопасти ротора может привести к увеличению утечки через больший зазор между вогнутыми усеченно-сферическими поверхностями 98 и выпуклыми усеченно-сферическими или полностью сферическими поверхностями (например, 96А на Фиг. 41).
[00119] В примере на Фиг. 8В и Фиг. 39-41 поверхности ведомого/ведущего роторов содержат радиально наружную аксиальную поверхность 84 и радиально внутреннюю аксиальную поверхность 86. Возникает область сопряжения между радиально наружной поверхностью 88 вставки 90 ведомого ротора и радиально внутренней поверхностью 86 ведомого/ведущего ротора. Выражение «область сопряжения» служит для определения конфигурации, при которой указанные радиально примыкающие поверхности могут находиться в соприкосновении или по существу в соприкосновении. Если консоль 81 (Фиг. 41), непосредственно примыкающая к выступу 80, имеет минимальную толщину и/или содержит материал с низкой жесткостью/модулем упругости, возможна значительная гибкость в радиальном направлении 83 у выступов 80. Как видно из примера на Фиг. 40, 41, данная гибкость обеспечивает возможность вставления радиально внутренней сферической вставки 96, если ее невозможно подогнать иным образом. В данном примере изображена сплошная сферическая вставка 96А, а не вставка, содержащая усеченно-сферическую поверхность 92. Как видно из Фиг. 50-52, возможно применение иных форм, например, усеченно-конической поверхности 236, вместо цилиндрической наружной поверхности 88.
[00120] Применение данных примеров возможно в тех случаях, когда допустимо вращение вставки 90 ведомого ротора относительно ведомого ротора 28. В другом примере может быть предпочтительно применение форм, выполненных с возможностью недопущения вращения вставки 90 относительно ротора 28. Например, на Фиг. 53-55 показано, что в случае применения у указанной области сопряжения многогранной призмы 250, она бы действовала как шпоночный паз для предотвращения вращения вставки 90 ведомого ротора относительно ведомого ротора 28. В примере на Фиг. 8А-8В вставка 90 ведомого ротора содержит цилиндрическую наружную поверхность 88 в пределах внутренней усеченно-сферической поверхности 92 ведомого ротора. Таким образом, вставку 90 ведомого ротора можно аксиально вставить в ведомый ротор 28. Например, на Фиг. 39 штифты 252 служат для предотвращения вращения вставки 90 ведомого ротора относительно ведомого ротора 28. Аналогичным образом, вставку 94 ведущего ротора можно вставить аксиально в ведущий ротор 76, при этом вращение этих компонентов относительно друг друга блокируют штифтами или иным способом или элементами крепления. В случае цилиндрической области сопряжения могут быть нужны штифты или иной способ предотвращения вращения вставки 90 ведомого ротора относительно ведомого ротора 28. При этом данная форма в одном примере может быть предпочтительнее многогранной призмы 250, так как толщина выступа 80 может быть постоянной. Если область сопряжения включает в себя многогранную призму 250, то, как раскрыто в примере на Фиг. 53-55, для обеспечения такой же гибкости выступ может содержать локальные области 81' относительно малой толщины. В одном примере соприкосновение между вставкой 90 ведомого ротора и вставкой 94 ведущего ротора можно минимизировать или устранить путем впрыска высоконапорной текучей среды между усеченно-сферическими поверхностями (92 и 98) этих компонентов (Фиг. 2). В случаях применения с достаточно низким крутящим моментом, аксиальные поверхности 84А/84В ведомого/ведущего роторов, или аксиальные поверхности 85А/85В вставок ведомого/ведущего ротора, или внутренние поверхности 86 можно соответствующим образом спроектировать для облегчения передачи крутящего момента без необходимости применения иных делительных устройств.
[00121] В одном примере на Фиг. 39 и Фиг. 2 наружная (вогнутая) усеченно-сферическая поверхность 92, ограничивающая часть камер 144, может быть выполнена за одно целое с вставкой 91 ведомого ротора. В другом примере эти компоненты также могут быть выполнены за одно целое с ведомым ротором 28, что устраняет необходимость в штифтах 252, которые в ином случае минимизировали бы или предотвращали бы вращение указанных компонентов относительно друг друга, и трубках 618, которые минимизировали бы или предотвращали бы нежелательную утечку текучей среды между ведомым ротором 28 и вставкой 91 ведомого ротора.
[00122] В примере на Фиг. 42, 43 радиально внутренняя усеченно-сферическая поверхность 96В может быть выполнена по существу сферической и содержать выпуклости 100 или несферические поверхности. Размещение выпуклостей 100 на радиально внутренней усеченно-сферической поверхности представляет собой один пример, в котором не нужны ни выпуклости на выступе 80, ни вставки ведомого/ведущего роторов на Фиг. 39-41. Предполагают, что оптимальным является размещение одной выпуклости на каждом выступе 80. В одном примере усеченно-сферический компонент 96В выполнен с возможностью соответствующего вращения в процессе сборки с ведомым/ведущим роторами (28/76) и переустановки после сборки. Переустановку внутренней усеченно-сферической поверхности после сборки выполняют для того, чтобы внутренняя усеченно-сферическая поверхность 96В образовала жесткие зазоры у выступа 80, тем самым минимизируя утечку между компонентом 96В и поверхностью 98 вставок 90/94. Указанный компонент, содержащий усеченно-сферическую наружную поверхность 96В, выполнен с возможностью крепления посредством болтов, утопленных винтов, адгезивов, сварки, пайки твердым припоем или иных крепежных элементов или способов крепления к ведомому/ведущему роторам (28/76) или к вставкам (90/94) ведомого/ведущего роторов.
[00123] В примере на Фиг. 44, 45 радиально внутренняя усеченно-сферическая поверхность 96С содержит проемы 104, выполненные с возможностью вмещения поршней 102. Во время сборки поршни 102 по существу углубляют в соответствующие проемы 104. После сборки во внутреннюю полость 106 внутри поршней 102 может происходить подача высоконапорной текучей среды, выдавливающей поршни 102 радиально наружу для вхождения в соприкосновение с поверхностями 98 вставки ведомого/ведущего ротора. В одном примере происходит изменение положение поршня радиально наружу и вхождение его в соприкосновение с выступом 80 (Фиг. 43) вставки 96. Внутренний усеченно-сферический компонент 96 (В-D) можно прикрепить в определенном положении к вставке 90/94 ведомого/ведущего ротора посредством болтов или иных крепежных элементов или способов крепления.
[00124] В одном примере поршни входят в соприкосновение с выступом для предотвращения или минимизации утечки в данной области для работы машины. Как видно из примера на Фиг. 46-49, утопленный винт 254 может быть затянут в отверстии 256, в результате чего происходит аксиальное перемещение конусовидной поверхности 258. Конусовидная поверхность 258 на утопленном винте входит в соприкосновение с клином 260 на обращенной радиально вовнутрь поверхности поршней 102, в результате чего поршни 102 проходят радиально наружу до тех пор, пока конусовидная поверхность 285 не войдет в соприкосновение с поверхностями ведомого/ведущего роторов (Фиг. 49) и не будет прижата к ним. В качестве альтернативы, если нужно создать предварительное натяжение поршней 102 в примыкающие поверхности ведомого/ведущего роторов (не показаны), то следует понимать, что аксиальная длина поршней 102 должна быть больше, так как соприкосновение между конусовидной поверхностью 285 и клином 260 сохранится, когда утопленный винт 254 будет затянут.
[00125] В примере на Фиг. 102-103С и Фиг. 115 охлаждающая среда проходит через вставку 95 ведущего ротора по каналу 155. Трубки 618 могут содержать уплотнительные кольца в канавках 618' под уплотнительное кольцо, обеспечивающие возможность потока через внутренний диаметр 618'' трубки. Трубки 618 могут действовать как штифты, препятствующие вращению вставки 95 ведущего ротора относительно ведущего ротора 76В. (Шестигранный) охватываемый выступ 251 вставки 91 ведомого ротора по размеру и форме может быть по существу идентичен ответной (шестигранной) охватывающей полости 251' ведомого ротора и препятствовать вращению вставки 91 ведомого ротора относительно ведомого ротора 28В. Охватываемый выступ 251 также показан с наружными сопрягаемыми поверхностями, состоящими из усеченно-конической (конической) поверхности 253 и усеченно-цилиндрической поверхности 255. Усеченно-коническая (коническая) поверхность 253 расположена в месте меньшего диаметра (шестигранной) формы. Благодаря конфигурации поверхности 253, возможно одновременно наличие дополнительного материала 29 (Фиг. 103С) у примыкающей части ведомого ротора 28В и пространства для отверстий 613А/613В в ведомом роторе 28В/вставке 91 ведомого ротора; отверстий, через которые происходит подача в (внутренний шар) углубление 99' напорной текучей среды по каналу 613 текучей среды (Фиг. 147).
[00126] Один пример содержит уплотнительное кольцо, установленное в канавку 257 под уплотнительное кольцо с возможностью предотвращения миграции напорной текучей среды из примыкающего отверстия 613А/613В за пределы канавки 257 под уплотнительное кольцо для создания давления на задней грани 259 вставки 91 ведомого ротора. При наличии градиента давлений, вставка 91 ведомого ротора может оставаться плотно прижатой к ведомому ротору 28В, что минимизирует или предотвращает в долгосрочной перспективе износ компонентов благодаря отсутствию соприкосновения металлов.
Сборка ротационной машины - Пример В
[00127] На Фиг. 102-104А и Фиг. 113 раскрыт пример В возможной сборки ротационной машины 20. Способы крепления могут включать в себя болты или иные известные способы крепления. Ведомый ротор 28В можно вставить в корпус 617А ведомого ротора. Далее можно прикрепить кольцо 37А ведомого ротора к ведомому ротору 28В, а затем прикрепить к корпусу 617А ведомого ротора большую шайбу 619А ведомого ротора и фланец 612А ведомого ротора. Далее можно присоединить вставку 91 ведомого ротора к вставке 95 ведущего ротора и внутреннему шару 97, а затем вставить введенные в зацепление компоненты в ведомый ротор 28В. Трубки 618 можно вставить во вставку 95 ведущего ротора. Далее ведущий ротор 76В можно присоединить к вставке 95 ведущего ротора и ведомому ротору 28В одновременно. Корпус 617В ведущего ротора можно прикрепить к корпусу 617А ведомого ротора, после чего к ведущему ротору 76В прикрепляют кольцо 37В ведущего ротора. К корпусу 617В ведущего ротора можно прикрепить (большую) первую шайбу 619В ведущего ротора и фланец 621В ведущего ротора, после чего (малую) вторую шайбу 623В ведущего ротора и опорную втулку 625В ведущего ротора прикрепляют к фланцу 621В ведущего ротора, а малую шайбу 623А ведомого ротора и опорную втулку 625А ведомого ротора прикрепляют к фланцу 621А ведомого ротора. Раскрытые выше компоненты могут быть по существу зафиксированы на своем месте, при этом вероятность их отклонения может быть по существу мала, так как высоты зазоров, выбранные для гибридных подшипников, по существу малы, составляя в некоторых случаях порядка тысячных долей дюйма или менее.
[00128] Основную заслонку 171 можно вставить в кожух 181 основной заслонки, после чего к основной заслонке 171 прикрепляют механизм 185 основной заслонки. Шайбу 624 можно вставить в привод 183 основной заслонки до прикрепления этих компонентов к кожуху 181 основной заслонки. Далее узел 31 основной заслонки можно прикрепить к фланцу 621А ведомого ротора.
[00129] Узел 33 регулирования производительности, раскрытый на Фиг. 104А и в поперечном разрезе на Фиг. 108А, можно собрать, прикрепив крепежный элемент 179 вспомогательной заслонки к вспомогательной заслонке 173 и вставив их в кожух 175 вспомогательной заслонки. Корпус 167 привода с присоединенным входным валом 165 привода и резьбовым элементом 177 можно вставить в расточенное отверстие глухого фланца 169. В одном примере резьбовой элемент выполнен с шагом самоконтрящейся резьбы (например, трапецеидальной резьбой по стандарту Американского института инженеров-механиков), благодаря чему периодические вызванные давлением нагрузки от камеры 144 могут не вызывать аксиальное перемещение вспомогательной заслонки 173. Узел 33 регулирования производительности можно прикрепить к корпусам 617А/617В ведомого/ведущего роторов, обеспечив зацепление резьбового элемента 177 с крепежным элементом 179 вспомогательной заслонки.
[00130] Заглушку 627 ведущего ротора можно прикрепить к фланцу 621В ведущего ротора. На стороне ведущего ротора можно вставить компоненты 631 торцового уплотнения, а затем - дополнительный фланец, если он нужен для фиксации компонентов 631 торцового уплотнения на их месте.
[00131] Следует понимать, что возможно применение иных известных способов сборки и последовательностей операций. Преимущества таких способов можно оценивать, исходя, главным образом, из того, насколько точно они позволяют расположить компоненты с минимальными повреждениями, например, царапинами или иными повреждениями поверхностей подшипника.
Сборка
Регулировки - Пример А
[00132] Трудности, ранее имевшие место при изготовлении узлов «ротор-ротор» с расположением корпуса и иных компонентов концентрически по отношению к центру сферы, облегчены в примере на Фиг. 1-5 за счет того, что узел 22 ведомого ротора и узел 24 ведущего ротора собирают в основании 58 корпуса и крышке 56 корпуса, и того, что узел 22 ведомого ротора и узел 24 ведущего ротора выполнены с возможностью внутренней регулировки.
[00133] Концентрическое расположение узла 22 ведомого ротора и узла 24 ведущего ротора можно отрегулировать относительно основания 58 корпуса и расточенных отверстий 116 крышки 56 корпуса путем вставки одной или более шайб 204 (Фиг. 3) между узлом 22 ведомого ротора и узлом 24 ведущего ротора. В одном примере раскрытые шайбы 204 могут представлять собой плоские гладкие шайбы. Они могут быть изготовлены из мягких металлов, например, алюминия или меди. Несмотря на то, что можно использовать более тонкие или более толстые шайбы 204, толщина тонких шайб чаще всего составляет от 0.001 дюйма до  дюйма. В одном примере, в результате допустимых производственных отклонений, узел 22 ведомого ротора может быть на 0.001 дюйма меньше, чем желательно. Добавив шайбу 204 (Фиг. 3) толщиной 0.001 дюйма, можно отрегулировать расстояние между ними. В одном примере осуществляют внутреннюю регулировку аксиальных положений ведомого ротора 28 и ведущего ротора 76 относительно соответствующих узлов и, как следствие, также относительно центра сферической полости 114. Указанную внутреннюю регулировку ведомого ротора 28 и ведущего ротора 76 можно осуществить после того, как машина будет собрана и до того, как машина будет задействована для перемещения/перекачки рабочей текучей среды, с дополнительной регулировкой в период эксплуатации машины. Данный способ регулировки облегчает расположение роторов относительно друг друга во время сборки, так как он обеспечивает большую степень свободы в отношении местоположения кольца и/или точности изготовления кольца или его расположения. Во время запуска из холодного состояния, температура компонентов может быть близка к температуре окружающей среды или равна ей. Аксиальное удлинение вала 40 ведомого ротора и вала 64 ведущего ротора, измеренное от центра сферической полости 114 до ближайшей поверхности кольца 38, может значительно отличаться от удлинения окружающих компонентов корпуса в том же направлении при разных расчетных условиях и условиях среды, окружающей машину. Данное расположение позволяет сохранять очень тонкие зазоры между передним цилиндром 32 и кольцом 38 и между задним цилиндром 42 и кольцом 38 в большинстве рабочих режимов. Управление аксиальным положением вала может быть желательно в других отраслях. В патенте США 4,801,099 раскрыт способ «…создания регулируемого гидростатического стабилизирующего усилия на вращающемся валу в аксиальном направлении для постоянного противодействия переменным аксиальным усилиям, воздействующим на поддающийся смещению вращающийся вал, и сохранения заранее определенного диапазона зазора пространства шлифования…». Сохранение малого зазора в некоторых примерах важно потому, что передний цилиндр 32 и задний цилиндр 42 содержат сегменты (118 и 120) гибридного подшипника, для которых нужно наличие жестких зазоров, в том числе - во время пуска, для минимизации утечки и для максимальной жесткости подшипников. Кроме того, раскрытый выше способ сборки позволяет регулировать высоту зазора у гибридных подшипников (134, 136, 72, 138, 118, 120) в пределах допустимых отклонений.
дюйма. В одном примере, в результате допустимых производственных отклонений, узел 22 ведомого ротора может быть на 0.001 дюйма меньше, чем желательно. Добавив шайбу 204 (Фиг. 3) толщиной 0.001 дюйма, можно отрегулировать расстояние между ними. В одном примере осуществляют внутреннюю регулировку аксиальных положений ведомого ротора 28 и ведущего ротора 76 относительно соответствующих узлов и, как следствие, также относительно центра сферической полости 114. Указанную внутреннюю регулировку ведомого ротора 28 и ведущего ротора 76 можно осуществить после того, как машина будет собрана и до того, как машина будет задействована для перемещения/перекачки рабочей текучей среды, с дополнительной регулировкой в период эксплуатации машины. Данный способ регулировки облегчает расположение роторов относительно друг друга во время сборки, так как он обеспечивает большую степень свободы в отношении местоположения кольца и/или точности изготовления кольца или его расположения. Во время запуска из холодного состояния, температура компонентов может быть близка к температуре окружающей среды или равна ей. Аксиальное удлинение вала 40 ведомого ротора и вала 64 ведущего ротора, измеренное от центра сферической полости 114 до ближайшей поверхности кольца 38, может значительно отличаться от удлинения окружающих компонентов корпуса в том же направлении при разных расчетных условиях и условиях среды, окружающей машину. Данное расположение позволяет сохранять очень тонкие зазоры между передним цилиндром 32 и кольцом 38 и между задним цилиндром 42 и кольцом 38 в большинстве рабочих режимов. Управление аксиальным положением вала может быть желательно в других отраслях. В патенте США 4,801,099 раскрыт способ «…создания регулируемого гидростатического стабилизирующего усилия на вращающемся валу в аксиальном направлении для постоянного противодействия переменным аксиальным усилиям, воздействующим на поддающийся смещению вращающийся вал, и сохранения заранее определенного диапазона зазора пространства шлифования…». Сохранение малого зазора в некоторых примерах важно потому, что передний цилиндр 32 и задний цилиндр 42 содержат сегменты (118 и 120) гибридного подшипника, для которых нужно наличие жестких зазоров, в том числе - во время пуска, для минимизации утечки и для максимальной жесткости подшипников. Кроме того, раскрытый выше способ сборки позволяет регулировать высоту зазора у гибридных подшипников (134, 136, 72, 138, 118, 120) в пределах допустимых отклонений.
Компенсация теплового расширения и сборочные допуски - Пример А
[00134] В примере на Фиг. 8А показана полость 140 между передним цилиндром 32 и корпусом 34 переднего подшипника ведомого ротора. Аналогичным образом образована полость 142 между задним цилиндром 42 и корпусом 44 заднего подшипника ведомого ротора. В одном примере посредством системы управления поддерживают желаемое количество текучей среды в этих полостях (140, 142) на узле 22 ведомого ротора и узле 24 ведущего ротора (Фиг. 2) для сохранения желаемого номинального зазора между передним цилиндром 32 и кольцом 38 и желаемого номинального зазора между задним цилиндром 42 и кольцом 38. Зазор рассчитывают по усредненным значениям выходных сигналов от датчиков положения о том, что компенсация теплового расширения достигнута и небольшие колебания, вызванные переменными нагрузками (например, давлением), не влияют на компенсацию. В одном пример датчики положения (не показаны) расположены на кольце 38, непосредственно примыкающем к кольцу на валу 40 ведомого ротора или валу 64 ведущего ротора для определения аксиального положения кольца относительно гибридных подшипников 118 переднего цилиндра и гибридных подшипников 120 заднего цилиндра и реагирования на него.
Компенсация теплового расширения и сборочные допуски - Пример В
[00135] В примере на Фиг. 102, 103 расстояние между центрами 77 сферы роторов и задними/передними упорными подшипниками (139А, 139В, 129А and 129В) у колец 37А/37В может быть по существу меньше, чем расстояние в примере А (Фиг. 1, 2) между центрами 77 сферы роторов и задними/передними упорными подшипниками (118/120) у колец 38 для ротационной машины 20 с эквивалентной объемной производительностью и эксплуатационными показателями (например, максимально возможной степенью сжатия и максимальным давлением на выпуске). Если диапазон теплового расширения не выходит за допустимые пределы для показателей работы подшипника и не ожидают соприкосновения металлов, система регулируемого поршня по примеру А (Фиг. 1, 2) может не быть нужна.
Снятие переднего или заднего цилиндра - Пример А
[00136] Фиг. 8В изображает пример без применения переднего цилиндра 32, например, при некоторых сценариях нагружения. Передний цилиндр 32 на Фиг. 8А выполнен с возможностью препятствования аксиальному перемещению валов (40/64) ведомого/ведущего роторов по направлению друг к другу. В некоторых сценариях нагружения у валов (40/64) ведомого/ведущего роторов возможно наличие достаточных усилий, работающих на отделение их друг от друга для достижения равновесия с (самокомпенсирующимися) гибридными подшипниками (134 и 136) ротора и гибридными подшипниками 120 заднего цилиндра. Например, давление рабочей текучей среды и напорной текучей среды у внутренних усеченно-сферических поверхностей (92/98 на Фиг. 2) ведомого/ведущего ротора может создавать аксиальные усилия, работающие на раздвижение валов (40/64) ведомого/ведущего роторов. Увеличение площади поверхности и/или давления уплотняющей текучей среды (в одном примере представляющей собой текучую среду подшипника и/или охлаждающую среду) у внутренних усеченно-сферических поверхностей (92/98 на Фиг. 2) ведомого/ведущего роторов позволяет устранить необходимость в переднем цилиндре 32, раскрытом в других примерах для того или иного набора сценариев нагружения. Увеличение размера/диаметра внутренней усеченно-сферической поверхности 92 может уменьшить объемную производительность, а повышение давления, подводимого к внутренним усеченно-сферическим поверхностям (92/98 на Фиг. 2) ведомого/ведущего роторов, может уменьшить полный КПД. В одном примере задний цилиндр 42 из примера на Фиг. 1-8В можно, в качестве альтернативы, снимать в сценариях, где нагружение может всегда действовать на кольца 38 в направлении центров 77 усеченных сфер роторов. Давление на подшипники 136/134 ведомого/ведущего роторов может вызвать такое отклонение, если объединенное усилие от рабочей текучей среды в камерах 144 и вклада от внутренних усеченно-сферических поверхностей (92/98 на Фиг. 2) мало. Площадь поверхности и/или давление текучей среды у внутренних усеченно-сферических поверхностей 92/98 ведомого/ведущего роторов можно минимизировать для минимизации указанного вклада в объединенное усилие. Данная нагрузка у усеченно-сферических поверхностей 92/98 ведомого/ведущего роторов, в комбинации с нагрузками от давления рабочей текучей среды и гибридных подшипников 118 переднего цилиндра, может быть по существу уравновешена нагрузками, работающими на сдвигание валов (40/64) ведомого/ведущего роторов. Если нужна дополнительная нагрузка для сдвигания валов (40/64) ведомого/ведущего роторов, ее можно приложить в виде давления выше атмосферного на соответствующую стороны валов (40/64) ведомого/ведущего ротора и/или у кольца 38, в том числе - там, где в ином случае был бы размещен задний цилиндр 42.
Делительные зубчатые передачи - Пример А
[00137] В примере на Фиг. 2, 3 гибридные подшипники 118 переднего цилиндра и гибридные подшипники 120 заднего цилиндра воспринимают аксиальные нагрузки (например, вызванные давлением), действующие параллельно (в аксиальном направлении) валу 40 ведомого ротора или валу 64 ведущего ротора соответственно. В одном примере гибридные подшипники содержат несколько карманов подшипника с потенциально разными (одновременно) давлениями. В одном примере гибридные подшипники 118, 120 также воспринимают изгибные нагрузки (например, вызванные давлением), могущие работать на изгиб вала 40 ведомого ротора или вала 64 ведущего ротора соответственно по их осям вращения. В одном примере передача крутящего момента от кольца 38 на валу 64 ведущего ротора кольцу 38 на валу 40 ведомого ротора в одном примере происходит посредством делительных шестерен 122. Каждая делительная шестерня 122 выполнена с возможностью опирания на обычные подшипники 124 на валу 126 делительной шестерни. В одном примере может не происходить значительный износ зубьев делительных шестерен 122, так как они входят в соприкосновение в чистой регулируемой среде (в пределах корпуса 55А), где размер наибольшей инородной частицы может не превышать тот, что пропускает система фильтрации смазочной жидкости. Поскольку рабочая текучая среда в камере 144 может содержать частицы гораздо большего размера, непосредственная передача крутящего момента между лопастями 78 ротора минимизирована и/или соприкосновение может быть по существу уменьшено или полностью исключено. Впрыск смазочной жидкости можно осуществлять под более высоким давлением, чем это было возможно раньше, между указанными местами для предотвращения попадания рабочей текучей среды в область зубьев шестерен в месте соприкосновения делительных шестерен 122. За счет размещения и зубьев шестерен, и гибридных подшипников 118/120 на кольцах 38, в данной конфигурации эти компоненты могут находиться в максимально возможной близости от камеры 144, благодаря чему размеры частей и зазоров могут быть минимальными без ущерба для габаритного размера, веса и герметичности/КПД. Гибридные подшипники 118 переднего цилиндра и гибридные подшипники 120 заднего цилиндра выполнены с возможностью восприятия изгибных нагрузок (например, вызванных давлением) вблизи сферической полости 114 для минимизации необходимого диаметра вала ротора за счет минимизации отклонения вала ротора. Аналогичным образом, делительная передача, состоящая из делительных шестерен 122, обычных подшипников 124 и валов 126 делительных шестерен, может быть выполнена более компактной, чем в известных конструкциях, благодаря ее близости к сферической полости 114.
[00138] В одном примере указанная зубчатая передача выполнена достаточно неподатливой (жесткой) для минимизации и/или исключения передачи крутящего момента непосредственно между аксиальными поверхностями ротора (т.е. 84А и 84В на Фиг. 39). Поскольку величина передачи крутящего момента является по существу разной в разных расчетных условиях (например, в случае компрессора - при разных давлениях всасывания и давлениях на выпуске), то система с «предварительным нагружением/натяжением» является технически сложной и/или может быть нужна ее регулировка. Выражение «с предварительным нагружением/натяжением» означает, что к компоненту или системе компонентов прикладывают нагрузки до начала эксплуатации. Например, начальное (аксиальное) натяжение в болте, создаваемое при начальной затяжке болтов, называется «предварительное натяжение». В данном примере «предварительное напряжение» болта обычно рассчитывают так, чтобы оно превышало любые последующие нагрузки (например, вызванные давлением, тепловое расширение и т.п.), могущие уменьшить силу натяжения в болте. «Предварительное нагружение» зубчатой передачи может включать в себя создание относительных крутящих нагрузок между компонентами. Создаваемое крутящее «предварительное нагружение» может быть по величине приблизительно равно ожидаемым нагрузкам (например, вызванным давлением), а по направлению противоположно им, для минимизации и/или исключения непосредственной передачи крутящего момента между поверхностями роторов. При этом ожидаемые нагрузки (например, вызванные давлением) могут значительно отличаться в зависимости от условий (например, давлений всасывания и на выпуске, рабочей текучей среды, регулирования производительности и т.п.). Поэтому неподатливая (жесткая) конфигурация является предпочтительной для минимизации и/или исключения передачи крутящего момента непосредственно между поверхностями роторов. Кроме того, следует учитывать направление вращения вала 64 ведущего ротора в сочетании с геометрией ведомого/ведущего роторов (28/76) для минимизации передачи крутящего момента через делительную передачу. Нагрузки давления у камеры работают на раздвижение поверхностей ведомого/ведущего роторов (28/76) в области(-ях) высокого давления, что может значительно увеличить передачу крутящего момента через делительную передачу. Как видно из примера на Фиг. 18, когда вращение вала 64 ведущего ротора происходит против часовой стрелки (если смотреть сзади), лопасти 78В ведущего ротора заканчивают ход вблизи впадин 82А ведомого ротора 76. Когда вращение вала 64 ведущего ротора происходит по часовой стрелке (если смотреть сзади), лопасти 78А ведомого ротора заканчивают ход вблизи впадин 82В ведущего ротора 28. Комбинации геометрических параметров роторов оптимизируют для определенного направления вращения вала 64 ведущего ротора для минимизации передачи крутящего момента через делительную передачу. Сочетание по существу неподатливой делительной передачи и минимизированной передачи крутящего момента через делительную передачу в одном примере минимизирует и/или исключает непосредственную передачу крутящего момента между поверхностями роторов.
[00139] Теоретически, возможно применение обычной зубчатой передачи, содержащей две шестерни и общий для них вал. В одном примере вал зубчатой передачи может быть по существу большим для минимизации запаздывания кручения. В таком варианте могут быть нужны роликовые подшипники и/или гибридные подшипники специального исполнения для работы при более высоких скоростях поверхности в сочетании с высокими радиальными нагрузками. Частоты вращения поверхности подшипника можно было бы уменьшить, увеличив размер шестерен на валу зубчатой передачи, однако это приведет к тому, что обычная зубчатая передача будет довольно большой. Пример на Фиг. 2-4 содержит шестерни 122 в двухосной конфигурации, при которой делительные шестерни 122 входят в непосредственное зацепление друг с другом, что позволяет минимизировать диаметр вала 126 делительной шестерни. Возможность этого обеспечена за счет того, что жесткость при кручении получают благодаря непосредственной передаче между шестернями. Результатом минимизации диаметра вала 126 делительной шестерни является создание устройства, в котором частоты вращения поверхности обычных подшипников 124 могут быть гораздо ниже, чем в случае вала большего размера. Данная зубчатая передача задумана как значительно более компактная и жесткая, чем известные устройства, что позволяет минимизировать размер, вес и стоимость.
[00140] Как раскрыто в примере на Фиг. 70А, один пример такой делительной зубчатой передачи можно применить для ведомого/ведущего роторов (28А/76В) с разным числом лопастей 78А'/78В'. Один такой пример раскрыт в патенте США №8,562,318 «Мультифазный насос с высокой степенью сжатия». В таком примере ротор с большим числом лопастей может работать с более низкой частотой вращения, чем противоположный ротор. В одном примере данное устройство выполнено с возможностью работы с частотами вращения, более высокими, чем у поршневой машины традиционной конструкции. Известные диапазоны частот вращения составляют 750-1200 и до 1800 об./мин включительно. Предложенная ротационная машина в одном примере выполнена с возможностью работы с частотой вращения 3600 об./мин включительно. В одном примере, может быть предпочтительно приводить в действие вал 64' ведущего ротора с меньшим числом лопастей, чем у вала 40' ведомого ротора, благодаря чему частоту вращения можно снизить на меньшую величину или не снижать. В примере на Фиг. 70 ведущий ротор 76' содержит три лопасти 78В', а ведомый ротор 28' - две лопасти 78А'. Поэтому, в случае ротационной машины, в одном примере частота вращения вала 40' ведомого ротора может быть в 1,5 раза выше частоты вращения вала 64' ведущего ротора. Такое изменение частоты вращения возможно благодаря тому, что в одном примере диаметральный шаг 262 зацепления на кольце 38В вала ведущего ротора в том же соотношении (т.е. 1,5) больше диаметрального шага 264 зацепления на кольце 38А вала ведомого ротора. Нормальные расстояния между каждым из колец 38А/38В и центрами 77' сферы роторов изображены в виде расстояния 130А и расстояния 130В на Фиг. 70А. В данном примере расстояние 130В равно половине диаметрального шага 264 зацепления на кольце 38А ведомого ротора. В данном примере расстояние 130А равно половине диаметрального шага 262 зацепления на кольце 38В ведущего ротора. Для значений «130В», которые меньше половины диаметрального шага 264 зацепления ведомого ротора, значения «130А» меньше половины диаметрального шага 262 зацепления на кольце 38 ведущего ротора. Для значений «130В», которые больше половины диаметрального шага 264 зацепления ведомого ротора, значения «130А» больше половины диаметрального шага 262 зацепления на кольце 38 ведущего ротора.
Данные относительные размеры не зависят от размеров делительных шестерен 122В/122А. В примере на Фиг. 70А делительные шестерни 122В/122А имеют эквивалентные диаметральные шаги зацепления, так как это снижает ожидаемую максимальную частоту вращения валов 126В/126А делительных шестерен.
[00141] В примере на Фиг. 70В, выходной вал привода/источника крутящего момента (например, двигателя или мотора) может быть соединен с соединительным фланцем 594 привода. Делительные шестерни 122А, 122В, 122С и 122D можно прикрепить к соответствующим валам посредством обычных конструкций и способов. Когда происходит вращение соединительного фланца 594 привода, может происходить передача вращающего момента между делительной шестерней 122D и делительной шестерней 122С. Вал 126' делительной шестерни в данном примере выполнен с возможностью передачи указанного крутящего момента делительным шестерням 122А и 122В, содержащим зубья шестерен, взаимозацепляющиеся с зубьями шестерен на кольцах 38А/38В. Если диаметральные шаги зацепления колец 38А/38В по существу эквивалентны друг другу и диаметральные шаги зацепления делительных шестерен 122А и 122В по существу эквивалентны друг другу, то частоты вращения вала 64' ведущего ротора и вала 40' ведомого ротора могут быть по существу эквивалентны. Таким образом, делительная зубчатая передача в данном примере выполнена с возможностью минимизации или предотвращения соприкосновения между поверхностями роторов. Диаметральные шаги зацепления зубьев шестерен на кольцах 38А/38В и делительных шестернях 122(А-D) обеспечивают возможность предсказуемого воздействия на величину крутящего момента и частоту вращения, возможных у каждой соответствующей оси. Наибольшая объемная производительность ротационной машины 20 возможна тогда, когда вращение валов 64'/40' роторов происходит с максимально допустимой частотой вращения. Поэтому, если привод имеет ограничения, обусловленные более низкой максимально допустимой частотой вращения, но может создавать избыточный выходной крутящий момент, может быть предпочтительно, чтобы коэффициент повышения частоты вращения между соединительным фланцем 594 привода и валами 64'/40' роторов был выше 1:1. Например, желаемый коэффициент повышения частоты вращения можно получить путем замены делительных шестерен 122С и 122D. В другом примере можно увеличить диаметральный шаг зацепления делительных шестерен 122А и 122В и/или уменьшить диаметральный шаг зацепления шестерен на кольцах 38А/38В. Запаздывание кручения в одном примере определяют как относительный поворот и соответствующую задержку по времени между двумя местами в ротационной машине 20. Если запаздывание кручения от соединительного фланца 594 привода к соответствующим роторам 76'/28' по существу различно, поверхности 76'/28' роторов могут входить в соприкосновение. Поэтому разнесение делительной шестерни 122С и делительных шестерен 122А/122В друг от друга и жесткость при кручении вала 126' делительной шестерни на каждой стороне делительной шестерни 122С могут быть важными параметрами для оптимизации, так как запаздывание кручения от делительной шестерни 122С к соответствующим роторам 76'/28' может быть по существу эквивалентным. Если сделать указанное запаздывание кручения по существу эквивалентным, то можно минимизировать размер вала 126' делительной шестерни и, тем самым, уменьшить общий размер и вес, а также создать возможность для уменьшения диаметральных шагов делительной шестерни 122С. Данная конфигурация также позволяет уменьшить потребность в обычных подшипниках для размещения валов во время сборки.
[00142] В весьма схематичном примере на Фиг. 70С вал может быть соединен с соединительным фланцем 594 привода. Во время работы машины 20, данный вал соединен с источником энергии, например, двигателем, мотором и т.п.Может быть желательно, чтобы вал 126' делительной шестерни был значительно больше других компонентов, чем это показано в примере на Фиг. 70В, для минимизации запаздывание кручения, создаваемого валом 126' делительной шестерни, между делительными шестернями 122В и 122А. Делительная шестерня 122А/122В может быть соединена с валом 126' делительной шестерни посредством известных конструкций и способов. В качестве альтернативы, профили зубьев шестерен могут быть выполнены за одно целое с валом 126' делительной шестерни. Когда соединительный фланец 594 привода вращает вал 126' делительной шестерни, может происходить передача вращающего момента между делительной шестерней 122А/122В и шестернями на кольцах 38А/38В. Если диаметральные шаги зацепления колец 38А/38В по существу эквивалентны и диаметральные шаги зацепления делительных шестерен 122А/122В по существу эквивалентны, частоты вращения вала 64' ведущего ротора и вала 40' ведомого ротора могут быть по существу эквивалентны. Таким образом, указанная делительная шестерня позволяет минимизировать или предотвратить соприкосновение поверхностей роторов друг с другом с одновременным созданием гидравлического уплотнения между ними. Если диаметральные шаги зацепления на делительных шестернях 122А/122В больше, чем диаметральный шаг зацепления на кольцах 38А/38В, частота вращения валов 64'/40' роторов может быть выше, чем у вала 126' делительной шестерни, являющегося входным валом в данном примере. Вал(-ы) могут быть по существу полыми для уменьшения вес по существу без увеличения запаздывания кручения.
[00143] В примере на Фиг. 2 зубья шестерен расположены на кольцах 38. Указанные кольца могут быть прикреплены к соответствующим ведомому/ведущему роторам 28/76 посредством болтов или иных известных специалистам в данной области техники способов. Кольца 38/шестерни 122, не выполненные за одно целое с роторами, позволяют уменьшить производственную себестоимость и улучшить показатели допустимых отклонений за счет упрощения шлифовки усеченно-сферических поверхностей роторов. Когда соединительный фланец 594 привода вращает вал 64 ведущего ротора, может происходить передача вращающего момента между шестернями на кольцах 38. Такая конфигурация может быть предпочтительна в случаях применения, где вращающийся узел 20 ротора приводят в действие посредством мотора. В одном примере рабочая частота вращения серийного мотора составляет 3600 об./мин, что не выходит за пределы допустимого рабочего диапазона вращающегося узла 20 ротора без необходимости применения внешнего редуктора. В одном примере рабочая частота вращения серийного двигателя составляет 750-1200 об./мин, в связи с чем нужен мультипликатор, например, внешний редуктор, для достижения валом 64 ведущего ротора рабочей частоты вращения 3600 об./мин. Обычно, для ротационной машины 20 может быть желательна более высокая рабочая частота вращения, поскольку ожидаемая объемная производительность может быть выше. В одном примере редуктор может нуждаться в техническом обслуживании, а периодичность и стоимость технического обслуживания, необходимого для двигателя, могут быть выше, чем для мотора. Указанная более компактная конфигурация позволяет уменьшить себестоимость, размер и вес вращающегося узла 20 ротора.
Давление слива из напорной полости шестерни/подшипника -Пример В
[00144] В примере на Фиг. 102-103 и Фиг. 111 зона соприкосновения шестерен 664 находится в пределах полости 445 шестерни. Обычно полость шестерни находится под атмосферным или близким к нему давлением и заполнена воздухом. В некоторых случаях применения с низкой скоростью поверхности она может быть заполнена жидким смазочным материалом или жидкотекучей консистентной смазкой под низким давлением. В одном примере ротационной машины 20 диаметральные шаги колец 37А/37В могут составлять около 23'', а частота вращения - около 3600 об./мин, что относит его к случаям применения с высокой скоростью поверхности. Если полость 445 заполнена текучей средой подшипника/смазочным материалом, а не газом, относительное увеличение вязкого сопротивления (и потребного вращающего момента) и образования тепла может снизить КПД и сократить срок службы шестерен. В одном примере специалистам в области техники будет понятно, что жидкость распыляют в заполненную газом полость на зону соприкосновения шестерен для охлаждения (не показано). Наиболее предпочтительным может быть направление распыляемой жидкости на зону соприкосновения непосредственно перед тем, как произойдет соприкосновение, после того, как оно произойдет, или в какой-либо комбинации. Любое из этих решений возможно в раскрытых примерах. В раскрытом примере показано, что происходит слив текучей среды из гибридных подшипников в находящуюся под давлением полость шестерни и, в зависимости от температуры, данный поток текучей среды подшипника и охлаждающей среды может создавать или не создавать преимущество в части поддержания приемлемо низкой температуры в зоне соприкосновения шестерен для минимизации заедания. В одном примере количество охлаждающей среды, достигающей полости 445 шестерни, может быть малым или нулевым, если гидравлическое сопротивление у площадки 659А по существу высокое.
[00145] В раскрытом примере полость 445 шестерни и соединенный с ней сливной канал 447 текучей среды подшипника/охлаждающей среды непосредственно примыкают к раскрытым выше сливным площадкам подшипника в качестве слива, находящегося под давлением ниже давления подачи в подшипники. Поэтому, независимо от гидравлического сопротивления у площадок, ожидают, что давление в примыкающих карманах будет составлять нечто среднее между давлением слива в полость шестерни и соответствующим давлением подачи в подшипник(-и). Очень низкое давление (например, близкое к давлению окружающей среды) в полости шестерни позволяет довести до максимума несущую способность подшипников 137А/137В валов ведомого/ведущего роторов, так как давление в карманах подшипника на одной стороне вала может достигать очень низкого значения (например, близкого к давлению слива) при увеличении локальной высоты зазора, тогда как давление в карманах подшипника на противоположной стороне достигает высокого значения (например, близкого к давлению подачи). Таким образом, давление подачи можно снизить для достижения такой же несущей способности, как в конфигурации с более высокими давлениями слива. Гибридные упорные подшипники 139А/139В ведомого/ведущего роторов, раскрытые в примерах G и J, могут быть выполнены с возможностью достижения гораздо более низкой воспринимаемой осевой нагрузки, чем это возможно в иных случаях, если давление в карманах подшипника может приближаться к давлению слива. Такой сценарий может быть важен в случаях применения, где ожидают, что давления газа в камере будут очень низкими. Максимальная способность воспринимать большие аксиальные нагрузки может остаться без изменений, так как она может зависеть, главным образом, от давления подачи. Если снизить давление слива, не изменив давление подачи, то можно увеличить расход потока/утечку из подшипника. Если давление подачи создавал насос, может возникнуть необходимость в дополнительной производительности и энергии, а также более дорогостоящем оборудовании ниже по потоку (например, сепараторах и теплообменниках), для работы при более высоком расходе потока. Обычные смазочные материалы для компрессора (например, составы на основе полиалкиленгликоля (ПАГ, англ. PAG) или полиальфаолефина (ПАО, англ. РАО), обычно применяемые в винтовых компрессорах) могут абсорбировать возрастающие части рабочей текучей среды (например, природного газа) при растущих давлениях.
[00146] По мере того, как давление смазочного материала падает, может происходить высвобождение некоторого количества рабочей текучей среды в газообразной форме, которая была растворена в текучей среде подшипника, из текучей среды подшипника. Такое разгазирование/пенообразование в гибридных подшипниках может быть нежелательно, так как пузырьки газа в некоторых примерах нужны для увеличения сжимаемости пленок гидродинамической текучей среды в подшипнике. Если данная пленка текучей среды не будет сплошной, фактическая волна давления (и возникающая в результате несущая способность) может не быть предсказуемой. Смазочный материал может перейти из жидкого в газообразное состояние (кавитация) в любых локальных областях, где происходит падение давления ниже давления парообразования смазочного материала (например, ниже атмосферного давления). Кавитация может разрушить масляную пленку и стать причиной износа примыкающих твердых компонентов (например, металлических поверхностей ротора, зубьев шестерен, примыкающих перемещающихся относительно друг друга поверхностей роторов, валов и т.п.). Несмотря на то, что среднее давление в кармане подшипника может не упасть ниже давления слива из подшипника, возможно наличие локальных областей, где все же происходит падение ниже давления слива. Для прогнозирования кавитации можно выполнить исследования по способу вычислительной гидродинамики (ВГД) или испытания. Кавитацию также можно предотвратить путем поддержания давления слива из подшипника значительно выше давления парообразования смазочного материала, которое может быть значительно выше давления окружающей среды. В качестве альтернативы, если с учетом ожидаемых нагрузок будет выбрано относительно высокое давление подачи, сливы подшипника могут находиться под атмосферным давлением, но давление в карманах подшипника может не достигать таких низких значений, так как полная несущая способность подшипника по воспринимаемым нагрузкам не нужна.
[00147] Достаточно высокое давление слива может необязательно обеспечивать возможность слива текучей среды подшипника из отверстий 447 (Фиг. 111) во впускную камеру 667 (Фиг. 108А) компрессора через трубную обвязку, которая может быть выполнена за пределами ротационной машины 20. Если текучая среда подшипника/охлаждающая среда в сливе 447 нагрета по существу сверх температуры рабочей текучей среды, может быть желательно охладить текучую среду подшипника/охлаждающую среду, так как более теплая текучая среда подшипника может расширять рабочую текучую среду, снижая объемную производительность. Охлаждение можно осуществлять известными в области техники способами (например, посредством теплообменника). Возникающее в результате давление в полости шестерни может быть обусловлено перепадом давления в линиях между полостью шестерни и впускной камерой 667. Достичь желаемого давления в полости шестерни можно с помощью регулятора давления. Ввод текучей среды подшипника/охлаждающей среды во впускное устройство компрессора обеспечивает возможность повышения приводом компрессора (например, двигателем или мотором) давления текучей среды подшипника/охлаждающей среды до давления на выпуске. Это позволяет уменьшить работу, нужную для дополнительного повышения давления текучей среды подшипника/охлаждающей среды до давления выше давление на выпуске для подачи в гибридные подшипники роторов. В качестве альтернативы, возможно применение насоса или иного способа перекачки, необходимость в котором может возникнуть, если давление в полости шестерни ниже давления на впуске компрессора.
[00148] Давление в полости шестерни может быть выше давления на выпуске, и слив рабочей текучей среды может происходить в любые компоненты ниже по потоку от компрессора (например, в трубную обвязку или газожидкостный сепаратор). Может быть предпочтительно отсепарировать текучую среду подшипника/охлаждающую среду от рабочей текучей среды под давлением на выпуске, а затем только повысить давление текучей среды подшипника до давления подачи в подшипник, которое, по меньшей мере, для гибридных подшипников роторов, может быть выше давления на выпуске. В одном примере это позволяет сэкономить энергию, которая в ином случае была бы затрачена на перекачку/перемещение текучей среды до достижения высокого давления. В одном примере можно не осуществлять дополнительное повышение давления охлаждающей среды с давления ниже по потоку от ротационной машины 20, которое в одном примере по существу аналогично давлению в выпускной камере (669). Если насос или иной способ повышения давления не предусматривает наличия газа, может отсутствовать дополнительная рабочая текучая среда, абсорбированная рабочей текучей средой. Поэтому разгазирование смазочного материала может не происходить, если давление в полости шестерни выше давления на выпуске. При этом для того, чтобы полость шестерни была конструктивно выполнена с возможностью выдерживать более высокое давление с минимальными отклонениями, могут потребоваться дополнительные материалы и затраты.
[00149] Как сказано выше, в случаях применения с высокими скоростями может быть предпочтительно, чтобы полости шестерни были заполнены газом, в одном примере для того, чтобы по существу уменьшить паразитные потери и образование тепла из-за сопротивления трения. После первоначальной сборки установки или ее останова на месте эксплуатации, полость шестерни можно заполнить воздухом под атмосферным давлением, удалив все прочие текучие среды и рабочие текучие среды. Может быть предпочтительно, чтобы подача высоконапорного масла в гибридные подшипники происходила до начала вращения вала во избежание соприкосновения металлов. Это может повлечь повышение давления в полости шестерни сверх атмосферного давления, в связи с чем возможно по существу уменьшение занимаемого газом объема. Например, данный объем может уменьшиться в 100 или более раз, если давление в полости шестерни превысит атмосферное давление в 100 раз. Как видно из Фиг. 111, указанный объем газа может быть уловлен в полости шестерни, если маслослив 447 расположен на дне полости шестерни, так как под действием гравитации может возникнуть тенденция к скоплению более плотного масла/жидкость на дне, в отличие от менее плотной рабочей текучей среды (например, газа). Дополнительный газ можно накачивать в полость шестерни или выкачивать из нее при необходимости, время от времени создавая связь по текучей среде через отверстие 446 с источником газа более высокого или низкого давления. В случаях применения, где давление в полости шестерни выше давления на выпуске, перемещение газа можно осуществлять посредством компрессора или иных известных специалистам в области техники способов, например, жидкостно-газового эжектора. В примерах с применением жидкостно-газового эжектора газ можно приводить в движение из области на выпуске в полость шестерни посредством части высоконапорной текучей среды подшипника до тех пор, пока шестерни не будут заполнены газом.
Компоновка и конструкция подшипника - Пример А
[00150] В примере на Фиг. 2 конфигурация подшипников вала 64 ведущего ротора и вала 40 ведомого ротора сводит к минимуму трудности, имеющие место в конфигурациях «ротор-ротор». Как сказано выше, в одном примере предусмотрены жесткие допуски (небольшие зазоры) у гибридных подшипников (134, 136, 72, 138, 118, 120). На ведущий ротор 76, вал 64 ведущего ротора, ведомый ротор 28 и вал 40 ведомого ротора могут воздействовать усилия, вызывающие отклонение компонентов в направлении действия высоких нагрузок, тем самым создавая возможность для соприкосновения ротора с ротором или ротора с корпусом. Крутящие нагрузки могут привести к отклонению ротора к ротору и трению. Аксиальные нагрузки могут отклонять роторы друг от друга, в результате чего возможно соприкосновение ротора с корпусом. Радиальные нагрузки или изгибные нагрузки у камеры с большей вероятностью могут вызывать соприкосновение ротора с корпусом, если погонная жесткость вала 40 ведомого ротора и вала 64 ведущего ротора сопоставимы, так как возможно одновременное перемещение обоих подвижных компонентов в одном и том же радиальном направлении. Соприкосновение может возникнуть у внутреннего шара; предпочтительно, чтобы такое соприкосновение не возникало, однако это может зависеть от сочетания допусков. Радиальные нагрузки у делительной шестерни (из-за передачи вращающего момента) могут стать причиной отклонения ротора к корпусу. Такое соприкосновение может увеличить износ и образование тепла, при этом износ впоследствии может увеличить утечку и/или привести к неисправности. В одном примере восприятие высоких радиальных нагрузок у камеры следует осуществлять как можно ближе к камере для минимизации изгибания валов 40/64, что позволяет минимизировать диаметр каждого вала. Увеличение угла между валом 40 ведомого ротора и валом 64 ведущего ротора позволяет минимизировать диаметр вала (40, 64) ротора для целевого расхода потока и частоты вращения, однако увеличение указанного угла альфа может стать причиной того, что на роторы (28 и 76) будут воздействовать более высокие радиальные нагрузки. При высоких давлениях на выпуске может возникать высокая аксиальная нагрузка, а при низких давлениях на выпуске - очень низкая аксиальная нагрузка. Более того, гибридные подшипники (134, 136, 72, 138, 118, 120) обычно размещают так, чтобы они не соприкасались с примыкающими поверхностями во время монтажа. Во избежание такого соприкосновения и для того, чтобы не возникла необходимость в обычных подшипниках, во время монтажа можно использовать временный фиксатор. Если привод/источник крутящего момента соединен с одним из валов роторов, может возникнуть опасность нарушения соосности, которую можно уменьшить с помощью временного фиксатора или обычных подшипников. Обычные подшипники (46 и 50) можно применить для обеспечения правильного расположения гибридных подшипников (134, 136, 72, 138, 118, 120). Обычные подшипники 46/50 можно применить в такой конфигурации, в которой их установка не вызовет затруднений.
[00151] В некоторых примерах возможно применение разъемных подшипников в машине, выполненной с возможностью соответствия указанным в настоящем документе техническим характеристикам. Разъемные подшипники обычно рассчитаны на низкие нагрузки и, как правило, имеют меньший прогнозируемый срок службы, чем те, что не являются разъемными. Во многих случаях нецелесообразно использовать только обычные подшипники (46 и 50) для восприятия высоких нагрузок, ожидаемых от раскрытой в настоящем документе машине (ротационной машине 20), работающей в указанном здесь расчетном диапазоне технических характеристик. Раскрытые здесь гибридные подшипники (например, 134 и 136) роторов могут воспринимать высокие радиальные нагрузки без возникновения изгибных нагрузок из-за уравновешивающей радиальной силы реакции. Радиальные гибридные подшипники (72 и 138) в непосредственной близости от центров 77 сферы роторов выполнены с возможностью создания дополнительной радиальной опоры для гибридных подшипников (134 и 136) роторов. Такая дополнительная жесткость может быть нужна в некоторых примерах для восприятия высоких радиальных нагрузок (например, вызванных давлением) и вклада делительной зубчатой передачи 132 в радиальную нагрузку. В одном примере данная опора расположена настолько близко к камере, насколько это возможно для данной конфигурации, для обеспечения возможности минимизации размера вала ротора. Непосредственно примыкающие гибридные подшипники (118/120) переднего/заднего цилиндра на противоположных аксиальных сторонах кольца 38 создают соответствующую силу реакции для широкого диапазона возможных аксиальных нагрузок (например, вызванных давлением). В одном примере аксиальные стороны кольца 38 содержат множество карманов 284 подшипника, выполненных с возможностью восприятия изгибных нагрузок. Эти изгибные нагрузки могут быть вызваны аксиальной нагрузкой, действующей параллельно, но не колинеарно, валу (40/64) ведомого/ведущего ротора. В одном примере непосредственно примыкающими и наиболее удаленными от камеры 114 являются передние обычные подшипники 46 и задние обычные подшипники 50. Расстояние между роликовыми подшипниками (при их наличии) в одном примере обеспечивает возможность создания обычными роликовыми подшипниками опорного момента для вала (40/64) ведомого/ведущего ротора для центрирования веса свободноопертой части роторов 28/76 до ввода гибридных подшипников в зацепление.
[00152] В одном примере относительное уменьшение диаметра вала возможно за счет того, что большие нагрузки (например, вызванные давлением), возникающие во время работы, воспринимают, в основном, гибридные подшипники (134, 136, 72, 138, 118, 120). Относительное уменьшение диаметра вала позволяет снизить частоты вращения поверхности подшипника и, благодаря этому, выбрать относительно небольшие роликовые подшипники для расчетных скоростей вращения. Они пригодны для работы при частотах вращения до 3600 об./мин включительно или более, удобны в монтаже и имеют продолжительный срок службы.
[00153] В примере на Фиг. 2 конфигурация/расположение гибридного подшипника (134/136) ведущего/ведомого ротора позволяет минимизировать необходимый диаметр вала благодаря способности воспринимать высокие радиальные нагрузки в максимально возможной близости к камере 114, обеспечивая возможность эксплуатации роторов в сценариях с более высокими нагрузками для того или иного размера ротора. Кроме того, заполнение зазора между наружными усеченно-сферическими поверхностями (36/62) ведомого/ведущего роторов и компонентами корпуса (основанием 58 корпуса и крышкой 56 корпуса) текучей средой подшипника минимизирует и/или предотвращает утечку газа из камеры (камер) более высокого давления в камеру(-ы) более низкого давления в данном месте, а также из указанной камеры (камер) в зазор вокруг валов (40/64) ведомого/ведущего роторов. Упрощенный способ определения несущей способности симметричного сферического подшипника, содержащего кольцевой ряд углубленных сегментов подшипника, слив из которых происходит под давлением окружающей среды (или близком к нему), состоит в применении известных математических формул. В примере на Фиг. 4, 5 и Фиг. 61 показано, что контур впадин 82 поверхностей роторов может препятствовать созданию замкнутого кольцевого ряда углубленных карманов 208 гибридного подшипника, охватывающего большую часть или всю располагаемую площадь наружных усеченно-сферических поверхностей 36/62 ротора. Кроме того, в одном примере создание дополнительного сливного канала(-ов) и высверливание сливных отверстий в любом из ротором может привести к тому, что будет происходить скопление значительного количества и рабочей текучей среды, и текучей среды подшипника под давлением слива, что может значительно снизить КПД компрессора. Указанные отверстия могут значительно ослабить ротор, увеличить затраты на машинную обработку и потребность в энергии на перекачку текучей среды для подачи в гибридный подшипник. Подача текучей среды в подшипник ротора под давлением выше максимального давления на выпуске рабочей текучей среды позволяет увеличить несущую способность подшипника и обеспечить принудительный поток текучей среды подшипника из питающей линии подшипника в рабочую текучую среду в непосредственно примыкающих камерах. Данный поток снижает вероятность загрязнения из-за закупоривания объемом сжимаемого газа капиллярных ограничителей, могущего привести к нарушению функционирования подшипника. В одномерной структуре к каждому карману 208 гибридного подшипника непосредственно примыкают два кармана подшипника и два сливных канала. Многомерная структура содержит по меньшей мере один карман 208 гибридного подшипника с только одним непосредственно примыкающим сливным каналом и по меньшей мере одним карманом 208 гибридного подшипника с по меньшей мере тремя непосредственно примыкающими карманами гибридного подшипника. Расположение карманов 208 гибридного подшипника в многомерной асимметричной структуре 593 без низконапорных сливов позволяет увеличить жесткость и обеспечить возможность работы в сценариях с более высокими нагрузками. Как раскрыто выше, несущая способность/жесткость многомерной структуры 593 карманов 208 гибридного подшипника на наружных усеченно-сферических поверхностях (36 и 62) ротора могут быть выше, чем у одномерной структуры на ведомом/ведущем роторах (28/76). Сопротивление трения также можно уменьшить, устранив необходимость в дополнительных площадках вокруг зон слива. Не все центры 596 сегментов гибридного подшипника в многомерной структуре 593 выровнены по окружности. При этом следует понимать, что размер и положение сегментов гибридного подшипника улучшают общую несущую способность/жесткость подшипника, одновременно уменьшая паразитные потери, например, из-за сопротивления трения, и потребность в дополнительной энергии на перекачку.
[00154] В примере на Фиг. 2-5 гидродинамический эффект может повышать несущую способность/жесткость любого из гибридных подшипников при достаточно высоких частотах относительного вращения поверхностей. Несмотря на то, что этот дополнительный вклад от гидродинамического эффекта можно получить, увеличив площадь поверхности площадок или не углубляя сегменты подшипника, следует понимать, что данное решение является менее предпочтительным для данной машины. Существенное повышение сопротивления трения и необходимость установления минимальной рабочей частоты вращения для машины (для получения преимущества от гидродинамического эффекта) снижает КПД. Следует понимать, что оптимальное решение включает в себя минимальные длины площадок, которые следует рассчитывать как минимальное соотношение длины и высоты зазора, и которые не должны быть меньше, чем практически осуществимо. Площадки не должны быть настолько малы, чтобы в случае возникновения по существу небольшой царапины или иного повреждения площадки, подшипник мог утратить работоспособность.
Компоновка и конструкция подшипника - Пример В
[00155] В примере на Фиг. 102, 103 каждый из валов 41/65 ведомого/ ведущего роторов и соответствующих роторов оперт на три гибридных подшипника 137А/135А/139А и 137В/135В/139В, каждый из которых воспринимает нагрузки, перпендикулярные соответствующим карманам подшипника. Водном примере передние гибридные упорные подшипники 129А/129В выполнены с возможностью применения вместо вышеуказанных задних упорных подшипников 139А/139В и/или в комбинации с ними. В одном примере это возможно путем реализации Примера Т (Фиг. 72В) гибридных подшипников, а не раскрытого здесь Примера S (Фиг. 72А) гибридных подшипников. В случае применения передних гибридных упорных подшипников 129А/129В вместо раскрытых выше задних гибридных упорных подшипников 139А/139В, передние упорные подшипники могут быть реализованы в соответствии с Примером S (Фиг. 72А) гибридных подшипников.
[00156] Гибридные подшипники 135А/135В ведомого/ведущего роторов выполнены с возможностью восприятия нагрузок, перпендикулярных усеченно-сферическим поверхностям 62В/36В роторов (Фиг. 115), а гибридные опорные подшипники 137А/137В ведомого/ведущего роторов выполнены с возможностью восприятия нагрузок, перпендикулярных соответствующим валам ведомого/ведущего роторов. Радиальная сила реакции на валу может препятствовать вращению вала под действием изгибных нагрузок, работающих на изгибание валов вокруг их осей 637/639 соответственно. Гибридные упорные подшипники 139А/139В и/или 129А/129В ведомого/ведущего роторов могут быть выполнены с возможностью восприятия нагрузок в аксиальном направлении, параллельном осям 637/639 соответствующих валов. Когда результирующие нагрузки смещены относительно осей 637/639 валов, карманы упорного подшипника (например, 285JA/ на Фиг. 145 и 285GA' на Фиг. 139) могут находиться под разным давлением, с возможностью восприятия изгибных нагрузок. Расположение подшипников, при котором они могут дублировать друг друга в восприятии нагрузок, может быть важным для повышения устойчивости подшипника и снижения его подверженности отклонению под действием импульсных или вибрационных нагрузок. Для восприятия нагрузок от шестерен или вызванных давлением газа нагрузок может быть нужна опора для восприятия аксиального/изгибающего момента, которую могут создать гибридные упорные подшипники ведомого/ведущего роторов. Компактная комбинация гибридных подшипников на каждом из соответствующих валов позволяет обойтись без дополнительной опоры дальше от камеры 144 сжатия.
Форсунки текучей среды - Пример А
[00157] При очень компактном построении роторов возникает трудность с установкой форсунки (форсунок) 110 текучей среды, выполненных с возможностью впрыска распыленной охлаждающей среды в камеру 144 сжатия (Фиг. 11-14), когда это необходимо. Со временем может происходить износ форсунок 110А/110В текучей среды, поэтому предпочтительно, чтобы их можно было без труда удалять из каналов, с которыми они соединены. Размещение форсунок 110 текучей среды в некоторых местах в пределах усеченно-сферических поверхностей 114 корпуса (Фиг. 3) может создать помехи для работы гибридных подшипников (134/136) ведущего/ведомого роторов, а их эффективность может быть менее предсказуемой из-за возможности образования жидкостного кольца у наружного диаметра камеры 114. Размещение форсунок 110 текучей среды на неподвижных компонентах обеспечивает возможность осуществления форсунками 110 текучей среды распыления в камеру в ограниченных пределах возможного интервала впрыска, так как форсунки 110 текучей среды не следуют за перемещением камеры 144 сжатия/расширения.
[00158] Также раскрыто жидкостное уплотнение 232 (Фиг. 11-14) между роторами для минимизации утечки рабочей текучей среды. Размещение форсунок 110 текучей среды в пределах поверхностей ведомого ротора или поверхностей ведущего ротора образует сложные поверхности, в некоторых примерах - с жесткими допусками. Кроме того, форсунки 110 текучей среды можно закрепить таким образом, что под действием вибраций не будет происходить ослабление соединения компонентов с их опорной конструкцией. Возникающий в результате объем рециркуляции является минимальным или заполнен жидкостью для минимизации снижения объемного КПД.
[00159] Как видно из примера на Фиг. 2-11, предусмотрено выполнение форсунок 110А/110В текучей среды в пределах радиально внутренней усеченно-сферической поверхности 92. В одном примере место расположения форсунок 110 текучей среды у данной поверхности может примыкать к камере до тех пор, пока объем камеры не станет по существу меньше. Данное уменьшение объема камеры может быть существенным настолько, чтобы устранить препятствия для подачи форсунками 110 текучей среды охлаждающего масла в камеру в течение всего хода сжатия в обычном случае применения ротационной машины 20. Такое размещение у внутренней усеченно-сферической поверхности 92 камеры 144А сжатия позволяет минимизировать объем охлаждающей среды, распыляемой непосредственно на расположенные поблизости аксиальные поверхности 84А/84В ведомого/ведущего роторов без предварительного взаимодействия с газом в течение достаточного времени. Возможно уменьшение отношения площади поверхности к объему распыленных капель, впрыскиваемых форсунками 110А/110В, после столкновения друг с другом или со стенками камеры (т.е. 92, 84А и 84В на Фиг. 14 и 114 на Фиг. 2). Так как эти более крупные капли обладают меньшей способностью к передаче тепла в пределах желаемого срока, предпочтительно свести к минимуму эти явления.
Техническое обслуживание - Пример А
[00160] В примере на Фиг. 1-2, техническое обслуживание раскрытых здесь ограничителей 348 подшипника ротора (Фиг. 65-67) или форсунок 110 текучей среды, в случае его необходимости, можно выполнить, открепив впускной патрубок 112 (и прикрепленную к нему секцию трубной обвязки) и сняв крышку 56 корпуса.
Форсунки текучей среды - Пример В
[00161] В примере А ротационной машины 20 (Фиг. 1-2) форсунки 109 текучей среды показаны входящими в состав вставки 90 ведомого ротора. В примере В ротационной машины 20 (Фиг. 102-103) форсунки 109 текучей среды расположены в пределах внутреннего шара (вогнутой внутренней усеченно-сферической поверхности камеры) 97. На Фиг. 103С показано, что пустотелые штифты 618 пропускают через себя охлаждающую текучую среду, одновременно удерживая внутренний шар и форсунки 109 текучей среды в сборе прикрепленными, с возможностью снятия, к вставке 95 ведущего ротора. Благодаря этому форсунки 109 текучей среды могут следовать за камерами 144 сжатия в течение всего хода сжатия в обычном случае применения ротационной машины 20.
[00162] Для облегчения установки форсунок 109 текучей среды в поверхности, ограничивающие проемы 111, и их снятия, предложено быстросъемное соединение, выполненное с возможностью работы без ослабления в условиях вибрации и/или прерывистых/пульсирующих нагрузок от текучей среды на форсунки текучей среды. Легко заменяемые форсунки 109 текучей среды создают желаемый расход потока и образуют малые отверстия, результатом чего является малый размер капель. На Фиг. 116-118С показано, что одна или более форсунок 109В охлаждающей среды могут быть вставлены в отдельные проемы 111 во внутреннем шаре 97. При приложении достаточного аксиального усилия для вставки форсунки 109 текучей среды в проемы 111, сопряжение конусов 115 на форсунке текучей среды с конусами 115' внутреннего шара может вызвать отклонение ножек 128 радиально вовнутрь в сторону оси вставки 109. Когда форсунка текучей среды полностью вставлена, как показано на Фиг. 118С, ее опорные поверхности 117 сопряжены с внутренней поверхностью 117' шара 97. Конусовидный выступ 113 на форсунке текучей среды выполнен с возможностью посадки на конусовидный выступ 113' внутреннего шара по существу с возможностью предварительного натяжения ножек 128. Для минимизации или исключения возможной нежелательной утечки вокруг сопла, канавка 127 уплотнительного кольца может заключать в себе уплотнительное кольцо. Когда форсунка вставлена в указанной конфигурации, быстросъемное соединение может воспринимать существенные аксиальные усилия, ожидаемые при изменениях давления текучей среды. Текучая среда может обтекать ножки 128 форсунки текучей среды и течь через отверстия 123 внутреннего шара прежде, чем поступить к отверстиям 121 форсунки текучей среды. Следует понимать, что отверстия 121 форсунки текучей среды могут быть выполнены с минимальной площадью поперечного сечения для приспособления к ножкам 119' инструмента для снятия форсунок, однако в иных случаях площадь поперечного сечения может быть по существу разной. Например, одним из пригодных для применения типов факела распыла является факел распыла в форме пустотелого конуса. Специалистам в данной области техники, знакомым с множеством геометрических форм, будет понятно, как создать такой факел распыла. Например, на верхних и нижних по потоку границах отверстий 121 площадь поперечного сечения может быть увеличена с плавным переходом к показанному диаметру, что обеспечивает возможность создания указанного факела в зависимости от имеющегося градиента давлений и иных известных в области техники факторов. Раскрытые в настоящем документе форсунки 109 текучей среды применимы и для конструкций, отличных от раскрытых в настоящем документе.
Техническое обслуживание - Пример В
[00163] В примерах на Фиг. 102, 103, не содержащих капиллярные ограничители подшипника ротора, может быть не нужно снимать корпус для снятия или обслуживания сопел 109 охлаждающей среды. Как проиллюстрировано на Фиг. 105, после удаления впускного канала из впускного патрубка 112 можно увидеть форсунку(-и) 109 текучей среды через впускной канал 191. Может быть желательно, чтобы вал ведущего ротора находился в определенном угловом положении для беспрепятственного доступа к форсунке(-ам) 109 текучей среды, которые нужно заменить. Вал ведущего ротора можно привести в это угловое положение вручную путем вращения вала 65 ведущего ротора или с помощью привода (например, двигателя или мотора).
[00164] Инструмент 655 специального исполнения для снятия форсунки текучей среды на Фиг. 116-118 может содержать ножки 119', выполненные с возможностью вставки в отверстия 121 форсунки текучей среды и далее в отверстия 123 внутреннего шара с последующим входом в соприкосновение с конусовидной поверхностью 119 форсунки текучей среды. Под действие достаточного аксиального усилия может происходить отклонение ножек 128 радиально вовнутрь до тех пор, пока не произойдет разъединение сопряжения 117/117' между форсункой текучей среды и внутренним шаром. Пока ножки 119' инструмента для снятия продолжают удерживать форсунку текучей среды в этом положении, с помощью инструмента 655 можно удалить форсунку 109А текучей среды из отверстия 111. В одном примере раздвижной инструмент или компонент, например, заклепочный, можно вставить в отверстие 121', а затем раздвинуть. С помощью раздвинутого инструмента (не показан) можно снять форсунку 109А текучей среды, так как аксиальные усилия снятия, воздействующие на конусовидную поверхность 119, могут создавать отклонение ножек 128 радиально вовнутрь, достаточное для снятия компонента. В одном примере сопла 109 содержат усеченно-сферическую поверхность 125, однако возможно применение и иных поверхностей.
[00165] Возможность легкого и эффективного снятия и замены сопел, например сопел 109, может обеспечивать преимущество, состоящее в смягчении проблем, связанных с износом при долгосрочной эксплуатации, например из-за эрозии.
Регулирование впрыска охлаждающей среды посредством гидравлического узла - Пример А
[00166] В случаях с низкой степенью сжатия может не быть нужен впрыск дополнительной охлаждающей среды для целей охлаждения, а в случаях с более высокой степенью сжатия может быть нужен впрыск значительного количества охлаждающей среды. Расход потока охлаждающей среды, нужный для передачи тепла в короткий располагаемый срок (например, тысячные секунды), можно минимизировать путем распыления более мелких капель текучей среды, так как чем меньше капли текучей среды, тем выше их отношение площади поверхности к объему. Это повышает однородность температур охлаждающей среды и рабочей текучей среды. Для уменьшения размеров капель можно увеличить градиент давлений. Таким образом, потребное количество охлаждающей среды можно минимизировать путем поддержания постоянного давления подачи с одновременным регулированием продолжительности впрыска. Регулирование момента начала впрыска позволяет получить дополнительные выигрыши в эффективности. Температуры газа на впуске могут зачастую составлять от 5°С до 20°С. При этом может быть нерентабельно охлаждать охлаждающую среду до температуры 20°С или ниже в условиях, где температуры окружающей среды могут достигать 20°С или выше. Если в машине происходит сжатие газа, его нагрев может быть значительным. Если температура охлаждающей среды во время впрыска в камеру выше температуры газа, термодинамический процесс может не быть настолько эффективен, насколько мог бы быть, в результате чего может возрасти потребность в мощности от привода. Впрыск в камеру охлаждающей среды, температура которой ниже температуры газа, также не является идеальным решением.
[00167] В примере на Фиг. 6, 7 и Фиг. 38 гидравлический узел 48 выполнен с возможностью облегчения регулирования расхода потока охлаждающей среды от почти нулевого до 100%-ного потока и в диапазоне между этими значениями. Как видно из Фиг. 57 и Фиг. 60C, охлаждающая среда может поступать в отверстие 150 впрыска в корпусе 44 заднего подшипника ведомого ротора с последующим поступлением в питающий канал 151 в неподвижном наружном гидравлическом цилиндре 154. В примере на Фиг. 9-32 показано, что регулировать расход потока можно путем регулирования размера, формы и положения неподвижного прохода(-ов) (146 и 148) охлаждающей среды. Так можно варьировать часть оборота, в которой допустим существенный поток через проемы поверхности вала/отверстия 152 впрыска (Фиг. 33) во (вращающемся) вале 40 ведомого ротора (Фиг. 61), тем самым варьируя то, когда и в каком количестве текучая среда может поступать в камеру во время сжатия. В примере на Фиг. 61-63 и Фиг. 9-11 подача в каждую камеру 144 сжатия ротора происходит по меньшей мере одной линии 153 впрыска в вале 40 ведомого ротора, при этом поступление потока происходит у отверстий 152 впрыска, а завершение - у форсунки(-ок) 110 текучей среды, примыкающей к камере 144 сжатия. В одном примере каждое отверстие впрыска связано по текучей среде только с одной линией 153 впрыска. Например, на Фиг. 11 форсунки 110А/110В текучей среды непосредственно примыкают к камере 144А сжатия и связаны с ней по текучей среде. Камера 144А сжатия в данном примере может находиться в положении максимального объема, непосредственно за которым следует начало хода сжатия в ней. Отверстия 152 впрыска и линия 153 впрыска (не показана), питающие форсунки 110А/110В текучей среды, в это время могут не подавать существенный поток охлаждающей среды в камеру 144А сжатия. То есть линия 153 впрыска (не показана) отверстия 152 впрыска, показанного на Фиг. 11 связанным по текучей среде с неподвижным проходом(-ами) (146 и 148) охлаждающей среды, может заканчиваться у форсунок текучей среды (не показаны) камеры 144В сжатия. Камера 144В сжатия может находиться в состоянии середины хода сжатия, при котором происходит уменьшение (или увеличение, если речь идет о ходе расширения) объема, когда камера 144В по существу изолирована, так как может происходить изменение давления относительно предыдущего положения. В одном примере пара отверстий 152 впрыска (Фиг. 63) выполнены на прямо (диаметрально) противоположных сторонах вала ротора и одновременно питают каждую из соответствующих линий 153 впрыска, что позволяет уравновесить вызванные давлением радиальные нагрузки на вал 40 ведомого ротора. В одном примере гидравлический узел 48, изображенный в разобранном виде на Фиг. 38, содержит внутренний цилиндр 156, скользящую по окружности гидравлическую заслонку 158 и неподвижный наружный гидравлический цилиндр 154. Внутренний цилиндр 156 в одном примере представляет собой неподвижный компонент, радиально примыкающий к отверстиям 152 впрыска вала 40 ведомого ротора, а скользящая гидравлическая заслонка 158 радиально непосредственно примыкает к внутреннему цилиндру 156. Скользящая гидравлическая заслонка 158 в одном примере преимущественно неподвижна, но выполнена с возможностью скольжения по окружности вокруг вала 40 ведомого ротора, когда давление в полостях 162 (Фиг. 60С) можно изменять посредством системы управления в комбинации с клапаном. В одном примере клапан представляет собой трехходовой или пятиходовой клапан. Внутренний цилиндр 156 и скользящая гидравлическая заслонка 158 в одном примере содержат проемы (146/148), выполненные с возможностью выравнивания в одну линию с отверстиями 152 впрыска в вале 40 ведомого ротора, когда должен произойти впрыск в каждой камере 144 сжатия для того или иного хода. Полости 162 могут быть образованы с окружным зазором между поршнями 160 на гидравлической заслонке 158 и поршнями 164/166 на неподвижном внутреннем цилиндре 156 и наружном цилиндре 154 соответственно. Существенному продольному перемещению гидравлической заслонки 158 могут препятствовать неподвижный внутренний цилиндр 156 и наружный цилиндр 154. Полости 162 в одном примере связаны по текучей среде с отверстиями 556 (А-D) в гидравлической заслонке 158, которые могут быть связаны по текучей среде с отверстия 558 (А-D) и канавками 560А и 560В в неподвижном наружном корпусе 154. Канавка 560А связана по текучей среде с отверстиями 558А и 558С. Канавка 560В связана по текучей среде с отверстиями 558В и 558D. В примерах, где отверстия 556 (А-D) в гидравлической заслонке 158 не создают существенное гидравлическое сопротивление, давления в полостях 162 на этих отстоящих по оси концах гидравлической заслонки 158 может быть по существу одинаковым. В таких примерах вызванные давлением аксиальные усилия, воздействующие на гидравлическую заслонку, могут быть по существу уравновешены, что позволяет минимизировать трение и износ. Когда давление у канавки 560А и соединенной с ней полости 162 отличается от давления у канавки 560В и соединенной с ней полости 162, гидравлическая заслонка 158 может скользить по окружности. На Фиг. 60В показано, что канавки 560А и 560В могут быть связаны по текучей среде с отверстиями 564А и 564В в корпусе 44 заднего подшипника ведомого ротора соответственно. В раскрытом примере фитинги трубной обвязки могут быть соединены с отверстиями 564А и 564В для создания по существу замкнутого контура с полостями 162 вблизи поршней 160 гидравлической заслонки 158. Таким образом, в примерах, где применяют систему управления с трехходовым или пятиходовым клапаном с указанными соединениями 564А и 564В, давление текучей среды можно использовать для скольжения гидравлической заслонки 158 по окружности.
[0168] В примере на Фиг. 9-32 и Фиг. 38 проемы (146/148) на этих компонентах проходят по существу эквивалентным окружным длинам. В качестве альтернативы, окружные длины проемов 146 на скользящей гидравлической заслонке 158 могут быть короче по окружности или проемы могут быть выполнены короче или иным образом с меньшим или большим отверстием поперечного сечения, по сравнению с окружными длинами проемов 148 на внутреннем цилиндре 156. Размер можно регулировать путем преграждения или частичного преграждения, по меньшей мере, некоторых из проемов 146 на скользящей гидравлической заслонке 158.
[0169] В примере на Фиг. 9-11 указанные проемы (146/148) расположены по одной линии с отверстиями 152 впрыска с возможностью пропуска максимального количества охлаждающей среды к камере во время хода сжатия, когда отверстия 152 впрыска выровнены в одну линию с проходом, образованном проемами (146/148). В примере на Фиг. 21-23 скользящую гидравлическую заслонку 158 можно регулировать с возможностью уменьшения прохода, образованного проемами (146/148), например, на половину от того, что показан на Фиг. 9-11. В одном примере, при отсутствии регулирования давления, в каждую камеру 144 сжатия поступала бы приблизительно половина количества охлаждающей среды из-за такого уменьшения размера проема.
[0170] В примере на Фиг. 24-26 комбинация проемов (146/148) может не создавать существенного прохода для поступления охлаждающей среды в отверстия 152 впрыска, в связи с чем ожидают, что охлаждающая среда практически не будет поступать в камеры 144 сжатия. Данные примеры иллюстрируют то, как два из параметров, в число которых входят продолжительность впрыска, время начала и время окончания впрыска текучей среды, можно регулировать во время работы ротационной машины 20 путем регулирования размера, формы и положения проходов охлаждающей среды (образованных проемами 146/148) в гидравлическом узле. Возможность регулирования продолжительности впрыска, времени начала и времени окончания независимо друг от друга во время работы можно обеспечить, добавив дополнительную скользящую гидравлическую заслонку, радиально непосредственно примыкающую к указанной гидравлической заслонке 158. В примере на Фиг. 38 скользящая гидравлическая заслонка 158 содержит поршни 160, входящие в полости 162 (Фиг. 60C), примыкающие по окружности относительно поверхностей 164 поршня неподвижного внутреннего гидравлического цилиндра или поверхностей 166 поршня неподвижного наружного гидравлического цилиндра.
[0171] Система управления выполнена с возможностью применения с клапанами (например, трехходовым или пятиходовым клапаном) для изменения давления в полостях 162 (Фиг. 60C). Таким образом, можно регулировать температуру на выпуске текучей среды, выходящей из машины. Если расход охлаждающей среды регулируют путем ограничения времени впрыска, а не давления, все же существует возможность обеспечения минимально возможного размера распыленных капель для случаев частичного охлаждения с целью уменьшения потребностей в охлаждающей среде и улучшения КПД компрессора. Регулирование в начале впрыска позволяет достичь максимального КПД компрессора.
[0172] В примерах, где на скользящей гидравлической заслонке 158 выполнены зубья шестерен, присоединенная зубчатая передача выполнена с возможностью осуществления регулировок вручную и/или с помощью (электрического) мотора, соленоида и т.п. Несмотря на наличие других способов приведения в действие скользящей гидравлической заслонки 158, считается, что наибольшую рентабельность и компактность обеспечивают способы с приведением ее в действие давлением.
Регулирование впрыска охлаждающей среды посредством гидравлического узла - Пример В
[0173] В примере на Фиг. 102, 103 и Фиг. 107 заглушка ведущего ротора 627 содержит множество углубленных каналов 157 (А-Е) текучей среды. В одном примере каналы 157 текучей среды время от времени связаны по текучей среде с одним отверстием 155 впрыска на камеру в вале 65 ведущего ротора во время того или иного оборота вала 65. Как показано на Фиг. 137-142, когда текучая среда поступает в отверстие 155 впрыска в вале 65 ведущего ротора, отверстие 155 впрыска связано по текучей среде с камерой 144 сжатия. Перепад давления минимизируют в проходе 155 как таковом для достижения максимального количества/давления/расхода потока и располагаемого давления у форсунок 109 текучей среды. Трубка 618, необязательно с канавками 618' под уплотнительное кольцо (удерживающими уплотнительные кольца), выполнена с возможностью как удержания от вращения вставки 95 ведущего ротора, так и минимизации утечки при перемещении охлаждающей среды во вставку 95 ведущего ротора. Более высокое давление может быть желательно у входа в форсунки 109 текучей среды для минимизации размеров капель в факеле распыла и обеспечения максимально возможного потока через каждое сопло.
[0174] Малые размеры капель могут составлять приблизительно 40 микрон. Такие мелкие капли имеют высокое отношение площади поверхности к объему для более эффективной/равномерной передачи тепла между охлаждающим маслом и рабочей текучей средой/технологическим газом в срок, могущий составлять приблизительно несколько миллисекунд. Если можно получить только более крупные капли, может быть нужно большее количество охлаждающей среды для предотвращения превышения желаемой температуры на выпуске рабочей текучей среды в срок миллисекундного масштаба, имеющийся для сжатия.
[0175] Углубленные каналы 157 (А-Е) текучей среды могут быть рационально расположены, как показано, на стороне вала, противоположной наибольшим ожидаемым нагрузкам в этом месте с учетом любых сочетаний нагрузок согласно техническим характеристикам компрессора. Поэтому, несмотря на то, что конструкция не уравновешена по давлению, это фактически может быть преимуществом, так как позволяет уменьшить максимальную ожидаемую результирующую нагрузку, воспринимаемую подшипниками. На Фиг. 109 и Фиг. 137-142 показано, что трассу проходов 155 к форсункам 109 текучей среды можно корректировать с учетом изменения положения каналов текучей среды; например, на Фиг. 137-142 показано, что канал 157С текучей среды и инжекторные сопла 109 могут быть расположены на по существу диаметрально противоположных сторонах вала 65 ротора.
[0176] Для удовлетворения потребностей в охлаждении, изменяющихся в широком диапазоне в зависимости от разных комбинаций степеней сжатия и объемной производительности по рабочей текучей среде, линии 159 (А-Е) охлаждающей текучей среды, питающие соответствующие углубленные каналы 157 (А-Е) текучей среды, можно открывать или закрывать. Таким образом, можно поэтапно обеспечивать достижение температуры на выпуске из диапазона приемлемых температур посредством простых недорогих клапанов двухпозиционного типа, известных специалистам в данной области техники. Изменение количества текучей среды, подаваемой в углубленные каналы 157 (А-Е) текучей среды, позволяет регулировать количество охлаждающей текучей среды, поступающей в камеру, без снижения располагаемого давления. Можно осуществлять распыление охлаждающей среды в камере только во время сжатия. Для достижения полного КПД, может быть предпочтительно, чтобы температура охлаждающей среды была выше температуры рабочей текучей среда, так как может быть желательно вместить большую массу более холодного газа в камеру сжатия, изолировать ее, осуществить сжатие газа до достижения им температуры, близкой к температуре рабочей текучей среды, а затем распылить охлаждающее масло для минимизации дополнительных повышений температуры из-за сжатия.
[0177] В случае применения встроенной функции регулирования производительности ожидают, что начало сжатия будет более поздним. Впрыск охлаждающей среды также можно начинать позже путем изменения состава углубленных каналов текучей среды, в которые будет происходить подача текучей среды. Данная идея в сочетании с возможностью постоянного распыления в камере сжатия во время сжатия позволяет заметно улучшить КПД по сравнению с известным уровнем техники, например, с простыми регулируемыми по давлению конструкциями, применяемыми в маслозаполненных ротационных винтовых компрессорах.
[0178] В одном примере протяженности каналов 157 текучей среды по окружности могут быть отличны друг от друга, при этом подача в тот или иной канал текучей среды может происходить через более чем одно отверстие 159, если это нужно для минимизации перепада давления, например.
[0179] В одном примере возможно создание уравновешенной по давлению конструкции посредством способов, схожих с раскрытым в примере А ротационной машины 20. На Фиг. 61 показано, что радиальные пары 152 линий охлаждающей текучей среды на диаметрально противоположных сторонах вала 40 (ведомого ротора) питают аксиальные отверстия 153. На Фиг. 38 показано, что проходы 146 текучей среды гидравлической заслонки 158 и проходы 148 текучей среды неподвижного внутреннего гидравлического цилиндра 156 расположены зеркально симметрично на диаметрально противоположных сторонах. Эти способы позволили создать уравновешенную по давлению конструкцию. В примере В ротационной машины 20 может быть создана аналогичная система трубопроводов в вале 65 ведущего ротора с парами линий охлаждающей текучей среды на диаметрально противоположных сторонах вала, принимающих охлаждающую текучую среду. В комбинации с каналами 157 текучей среды на Фиг. 107, расположенными зеркально симметрично на диаметрально противоположных сторонах, они позволяют уравновесить пример на Фиг. 107 по давлению. Такая конфигурация может быть желательна, если величина вызванных давлением радиальных нагрузок на вал 65 ведущего ротора достаточно большая для создания результирующей максимальной нагрузки по существу в том же направлении на подшипники 137В вала ведущего ротора (Фиг. 103). Величина нагрузки от давления у каналов 157 текучей среды (Фиг. 107) может по существу зависеть от давлений текучей среды и диаметра вала 65 ведущего ротора. Кроме того, аксиальная длина вала 65 ведущего ротора, на который действует нагрузка от асимметричного давления, может по существу влиять на указанную нагрузку.
[0180] На Фиг. 103 линия 601 может питать канавки 603, которые могут быть расположены на каждой из сторон каналов 157 текучей среды. Площадки 657 могут аксиально отделять каналы 157 текучей среды от питающих канавок, при этом поток между ними может быть по существу ограничен по существу малыми высотами зазоров у площадок 657. Указанные канавки могут ограничивать нагрузку от асимметричного давления на вал пределами канавок 603 и, если не происходит подача текучей среды ни в один из каналов 157 текучей среды, в канавки 603 может поступать высоконапорная текучая среда под давлением, по существу не ниже максимального давления в камере 144 сжатия, для предотвращения утечки рабочей текучей среды обратно по линиям 155 впрыска. На Фиг. 109 показано, что площадка 659А может ограничивать поток в полость 445 шестерни или из нее, а площадка 659В может ограничивать поток за компоненты 631 торцового уплотнения, слив которого происходит из линии 605 предпочтительно на впуск компрессора (не показан). Если гидравлическое сопротивление линии 605 и соединенного с ней прохода (не показан) к указанному впуску является по существу низким по сравнению с площадкой 659В, то давление у компонентов 631 торцового уплотнения может быть по существу таким же, как давление на впуске. Это может быть желательным, так как более низкое давление и существенная величина охлаждения, создаваемого текучей средой, омывающей уплотнение, позволяют по существу продлить ожидаемый срок службы.
Скользящее кольцевое уплотнение/Впуск и выпуск - Пример А
[0181] В одном примере ротор имеет очень компактное построение, поэтому объем рециркуляции в рабочей камере, создаваемый клапанами обычной конструкции, может значительно уменьшить объемный КПД машины. Такое компактное построение в сочетании в высокой расчетной частотой вращения машины (т.е. до 3600 об./мин или более) усложняет эффективный впуск и выпуск рабочей текучей среды в рабочие камеры и из них. Ограничение располагаемого проходного сечения, через которое возможен впуск в камеру, может создать перепад давления, уменьшающий количество газа, попадающего в камеру до начала сжатия и, тем самым, уменьшающий объемный КПД. Ограничение располагаемого проходного сечения на выпуске камеры увеличивает скорости потока и износ, тем самым сокращая ожидаемые сроки службы компонентов. Достаточно жесткое ограничение на выпуске может стать причиной того, что давление в камере значительного возрастет и превысит расчетное давление на выпуске, в связи с чем привод должен совершать большую работу. Достаточно сильный скачок давления сверх расчетного давления может привести к катастрофическому отказу ротационной машины 20 в целом. Приводимые в действие давлением клапаны на впуске или выпуске зачастую должны иметь относительно большие высоты подъема при относительно высоких расчетных частотах вращения (например, 3600 об./мин или более). Подвижный компонент(-ы) может быть должен пройти относительно далеко для создания достаточного проходного сечения. Ускоренное перемещение подвижного компонента в открытое или закрытое положение в некоторых примерах занимает значительное время (например, тысячные секунды) по сравнению с изменениями объема камеры при высоких частотах вращения ротационной машины 20, даже если такому перемещению способствуют усилия, создаваемые высоконапорной текучей средой (например, гидравлической жидкостью). Во время перемещения подвижного компонента в открытое положение, он все еще создает ограничение. Аналогичным образом, когда должно произойти закрытие клапана, его перемещение в закрытое положение занимает некоторое время, в течение которого он пропускает текучую среду с выхода в камеру. Более того, учитывая относительно длинные расстояния, которые подвижный компонент должен пройти за относительно короткое время (т.е. максимальная расчетная частота вращения 3600 об./мин или выше значительно выше, чем у большинства компрессоров того же диапазона мощности), ударные усилия могут значительно превышать отраслевые нормы и приводить к преждевременным отказам клапанов. Поскольку ударные усилия являются произведением и скорости, и массы подвижного компонента(-ов), была выполнена оценка конфигураций с множеством компонентов меньшей массы. Также оценили замедление подвижного компонента перед ударом. Для многих клапанов очень важно, чтобы открытие и закрытие газовых проходов происходило, когда это нужно, а в остальное время они оставались закрытыми. В отрасли ведется большая работа по модификации клапанов для сохранения надлежащих показателей работы в условиях переменных давлений на всасывании и выпуске. Со временем, располагаемое давление на всасывании компрессора обычно падает, и, по мере того, как это происходит, компрессор становится менее эффективным, так как клапан можно оптимально рассчитать только на конкретное давление, а для выполнения каких-либо регулировок компрессор нужно отключать, что может повлечь значительные потери, учитывая издержки упущенной выгоды, связанные с не выпуском продукции.
[0182] В случае применения приводящего двигателя, может быть предпочтительно поддерживать потребности в мощности от привода на постоянном или по существу постоянном уровне без значительных изменений частоты вращения привода относительно его идеальной номинальной частоты вращения и мощности. Также может быть предпочтительно, чтобы можно было не отключать компрессор (во избежание простоя) на время проведения работ по изменению его рабочих характеристик с целью поддержания постоянного потребления мощности для удовлетворения потребностей ведущего ротора и/или приспособления к новым условиям на впуске в компрессор в связи с изменениями сценариев добычи. Для начальных этапов добычи на газовом месторождении характерны более высокие расходы потока и давления на впуске, чем на последующих этапах добычи, в связи с чем возрастает потребность в выработке мощности для работы компрессора определенного постоянного объема с определенной частотой вращения. Вместо того чтобы сделать выбор в пользу приводящего двигателя максимальной производительности для удовлетворения потребностей начальных этапов добычи на новом месторождении, которые зачастую являются короткими и для которых характерны большой объем и высокое давление, добывающая организация может предпочесть приводящий двигатель, чей размер соответствует сценариям добычи по окончании начального этапа, для которых характерны менее резкие изменения, более низкие давления, более низкие объемы, и, как следствие, более низкие потребности в мощности. Обычно это обусловлено тем, что чем выше номинальная мощность двигателя, тем он дороже, а для достижения максимальной эффективности приводящего двигателя может быть желательно максимально увеличить продолжительность периода графика добычи, в котором двигатель работает максимально близко к уровню его идеальной номинальной мощности. При этом, если на начальных этапах добычи с высокими давлениями на впуске и высокими объемами применяют компрессор постоянного объема, то можно ожидать, что производительность компрессора и потребление мощности будут гораздо ниже при более низких давлениях на впуске и объемах без внесения таких значительных изменений в поршневой компрессор, как ввод дополнительных ступеней и/или изменение размеров цилиндров. Если бы добывающая организация пожелала иметь «избыточную мощность» (т.е. компрессор постоянного объема, эксплуатируемый не с полной производительностью для приспособления к более низким давлениям на впуске и меньшему количеству пропускаемого материала, характерным для периодов добычи, следующих за начальным), то эксплуатация обычного поршневого компрессора в таком режиме была бы очень неэффективна. Поэтому специалистам в данной области техники будет очевидно, что существует потребность в компрессоре с возможностью изменения объемной производительности при разных давлениях на впуске для поддержания постоянного или по существу постоянного потребления мощности двигателя и/или приспособления компрессора к изменениям условий на впуске в компрессор. Это позволит исключить расходы на модификацию компонентов и издержки упущенной выгоды, связанные с невыпуском продукции в период останова компрессора.
[0183] В примере на Фиг. 6-37 скользящее кольцевое уплотнение 30, за счет перемещения элементов сжатия (т.е. ведомого ротора 28 и ведущего ротора 76) и примыкающего компонента(-ов) относительно друг друга, открывает и закрывает проходы для выпуска или впуска, при необходимости, рабочей текучей среды в камеру 144 сжатия. Впускная заслонка 54 и скользящее кольцевое уплотнение 30 уменьшают или устраняют необходимость в способах открытия или закрытия проходов рабочей текучей среды с отдельным исполнительным механизмом. Указанные проходы рабочей текучей среды выполнены с возможностью нахождения в надлежащем месте во время запуска. Размер и местоположение проходов можно регулировать даже во время работы машины. После достижения желаемой частоты вращения валов 40/64 ведомого/ведущего роторов, могут быть нужны только относительно медленные регулировки. Данное регулирование позволяет уменьшить или устранить необходимость в неоднократном (по существу) ускорении или замедлении компонентов.
[0184] Проходы рабочей текучей среды в одном примере могут быть большими, так как их открытие происходит очень быстро и естественным образом при вращении роторов 28/76 мимо неподвижных проемов, образованных примыкающими компонентами, пропуская рабочую текучую среду в камеры 144 сжатия или из них. В одном примере отсутствует необходимость ускорения каких-либо компонентов с последующим возвратом для освобождения прохода(-ов). При высоких частотах вращения увеличение и последующее уменьшение проходного сечения для газа происходят значительно быстрее, чем при применении альтернативных способов, например, клапанов, что позволяет значительно улучшить полный КПД. В частности, это имеет место в сценариях с более высоким расходом потока. Регулировки входного прохода(-ов) обеспечивают возможность уменьшения потока на 0%-100% путем оставления прохода(-ов) открытыми после достижения максимально возможного объема камеры. Данная регулировка на впуске позволяет разгрузить привод на 0%-100%, за вычетом паразитных потерь на трение и т.п. Материалы, находящиеся в непосредственной близости от прохода(-ов), можно удалить с минимальными усилиями, действуя за пределами машины, когда она остановлена, что может быть важно для устранения проблем, связанных с износом с течением времени. Такое техническое обслуживание, выполняемое только при необходимости, может включать в себя снятие крышки 56 корпуса, а затем основной заслонки 170 и/или вспомогательной заслонки 172.
[0185] В примере на Фиг. 37 скользящее кольцевое уплотнение 30 изображено в разобранном виде. В данном примере основную заслонку 170 может удерживать кольцо 174 основной заслонки, а вспомогательную заслонку 172 - кольцо 176 вспомогательной заслонки. Распорная деталь 178 скользящей заслонки, корпус 180 скользящей заслонки и гайка 182 скользящей заслонки являются неподвижными компонентами, могущими совместно ограничивать продольное перемещение кольца 174 основной заслонки и кольца 176 вспомогательной заслонки. Кольцевые зазоры между распорной деталью 178 скользящей заслонки и основной заслонкой 170 и распорной деталью 178 скользящей заслонки и вспомогательной заслонкой образуют полости 184 (Фиг. 8В). Давление в этих полостях 184 можно изменять посредством системы управления с трехходовым или пятиходовым клапаном. Так можно регулировать положение основной заслонки 170 и вспомогательной заслонки 172 с возможностью уменьшения потока на 0%-100% и создания отношения давлений величиной 1 или приблизительно 1 к 110 или выше. Полости 184 в одном примере связаны по текучей среде с отверстиями 238(А-D) в распорной детали 178 скользящей заслонки и корпусе 180 скользящей заслонки, связанными по текучей среде с канавками 244(А-D) на внешней периферии корпуса 180 скользящей заслонки. Уплотнения (например, уплотнительные кольца) можно применять в непосредственной близости к канавкам 244(А-D) для минимизации или устранения связи по текучей среде между этими канавки. Как видно из Фиг. 60А, канавки 244(А-D) могут быть связаны по текучей среде с соответствующими поверхностями, ограничивающими отверстия 240(А-D) в корпусе 24 переднего подшипника ведомого ротора и отверстиями в основании 58 корпуса, и заканчиваться на периферии компрессора. В раскрытом примере фитинги трубной обвязки могут быть соединены с отверстиями 242А и 242С для создания по существу замкнутого контура с полостями 184, примыкающими к поршням кольца основной заслонки. Таким образом, в случае применения системы управления с трехходовым или пятиходовым клапаном с соединениями 242А и 242С, под действием давления текучей среды может происходить скольжение кольца 174 основной заслонки и соединенной с ним основной заслонки 170 по окружности. Фитинги трубной обвязки могут быть соединены с отверстиями 242В и 242D для создания по существу замкнутого контура с полостями 184, примыкающими к поршням кольца 176 вспомогательной заслонки. Таким образом, в случае применения системы управления с трехходовым или пятиходовым клапаном с соединениями 242В и 242D, под действием давления текучей среды может происходить скольжение кольца 176 вспомогательной заслонки и соединенной с ним вспомогательной заслонки 172 по окружности.
[0186] В примерах на Фиг. 9-20 роторы изображены в четырех угловых положениях. Поток рабочей текучей среды, входящий в камеру или выходящий из нее, обозначен номерами 614 и 616 соответственно. Каждое положение включает в себя три вида в проекции вала ведущего ротора на левой стороне для оптимального представления положений основной заслонки 170 и вспомогательной заслонки 172 относительно камер 144 сжатия. Для лучшего понимания ориентации видов в проекции, читатель может проанализировать обозначения, представленные для впускной заслонки 54, выпускного уплотнения 200, основной заслонки 170 и вспомогательной заслонки 172. Первое, второе, третье и четвертое угловые положения представляют собой 0-, 30-, 60- и 90-градусные угловые положения на Фиг. 9-11, Фиг. 12-14, Фиг. 15-17, Фиг. 18-20 соответственно. Следует понимать, что, поскольку лопастей три, а расчетная одна треть оборота составляет 120 градусов, если бы было показано 120-градусное угловое положение, оно бы выглядело идентично 0-градусному угловому положению. Наполнение той или иной камеры газом может происходить в течение периода приблизительно 240 градусов до тех пор, пока не будет достигнут максимальный объем. Аналогичным образом, в представленном примере уменьшение объема от максимального может происходить в течение периода приблизительно 240 градусов. Уменьшение объема от максимального может включать в себя части хода, когда происходит сжатие и последующий выпуск до достижения по существу нулевого объема. При этом уменьшение объема также может необязательно включать в себя связь по текучей среде с входом, если осуществляют регулирование производительности для уменьшения объемной производительности. Если камеру оставить открытой со стороны входа, когда максимально возможный объем уменьшен наполовину, может произойти уменьшение объемной производительности и потребной мощности на по существу тот же коэффициент. Следует понимать, что, поскольку в данном примере для совершения полного хода впуска и выпуска для той или иной камеры нужен оборот на 480 градусов, в некоторые моменты одновременно могут существовать более трех камер. При этом могут быть нужны только три линии 153 впрыска для подачи в форсунки 110 текучей среды у трех впадин 84А ведомого ротора, так как в данном положении у внутренней усеченно-сферической поверхности 92 ведомого ротора возможна связь по текучей среде с камерой в течение значительной части или всей части хода, когда происходит сжатие. Во время части хода, когда происходит выпуск, преимущество от распыления охлаждающего масла может быть минимальным или отсутствовать. Более того, может быть нужен градиент давлений для распыления масла в камере, что предполагает повышение давления насосом или иным устройством, потребляющим энергию, для направления потока масла в камере во время части хода, когда происходит выпуск.
[0187] На Фиг. 11 камера 144А сжатия показана в положении максимального объема с образованием камер 144В и 144С. На Фиг. 12-14, Фиг. 15-17 и Фиг. 18-20 показано, что происходит уменьшение камеры 144А по мере постепенного изменения положения вала 64 ведущего ротора на каждые 30 градусов. Следует понимать, что камера 144А на Фиг. 18-20 выглядела бы по существу также, как камера 144С на Фиг. 9-11, при последующем повороте на 30 градусов. Приблизительно в этот момент времени каплевидный объем 145 отделен от камеры 144А в 120-градусном положении (обозначено как 144С). Далее, по мере постепенных поворотов камеры 144С с шагом 30 градусов, на Фиг. 9-11, Фиг. 12 - 14, Фиг. 15-17 и Фиг. 18-20 показано, как выглядела бы камера 144А в 120-, 150-, 180- и 210-градусных угловых положениях соответственно. На Фиг. 12-14 показано, что каплевидный объем 145 связан по текучей среде с камерой 144В; в это время может происходить впуск в камеру. Может происходить объединение частично сжатого газа в каплевидном объеме 145 с всасываемым газом более низкого давления. Также предполагают, что объем камер 144А будет по существу нулевым в 240-градусном угловом положении, т.е. вновь в положении на Фиг. 9.
[0188] Единственными существенными объемами на Фиг. 9-11 могут быть камеры 144(А-С) и каплевидный объем 145. На Фиг. 12-14 показана камера 144' меньшего объема, увеличившегося относительно по существу нулевого объема. Поток 614 в эту камеру может начать процесс впуска. Последующий 30-градусный поворот относительно положения камеры 144' на Фиг. 18-20 предполагает, что камера 144' в предполагаемом 120-градусном угловом положении выглядела бы идентично камере 144В в 0-градусном положении на Фиг. 9-11. Камера 144В на Фиг. 18-20 может выглядеть идентично камере 144' в 210-градусном угловом положении. После последующего 30-градусного поворота ожидают, что камера 144' в 240-градусном угловом положении будет выглядеть идентично камере 144А на Фиг. 9-11. Ожидают, что данное положение будет положением максимального объема.
[0189] В примере на Фиг. 33-34 раскрыт впускной патрубок 112, связанный по текучей среде с впускным проходом 186 и вспомогательным впускным проходом 190. Как раскрыто выше, когда камера 144 достигнет максимального объема, как, например, камера 144А на Фиг. 11, вращение впадин 82В ведущего ротора мимо неподвижных поверхностей впускной заслонки 54 в данном примере может периодически прерывать связь по текучей среде между камерой 144А и впускным проходом 186. Обод 26 может быть прикреплен к ведомому ротору 28 с возможностью пребывания отверстий 196 в ободе 26 радиально в непосредственной близости от впадин 84А ведомого ротора. Регулирование положения впускной заслонки 54 может не быть нужно для регулирования объемной производительности по рабочей текучей среде. Вспомогательный впускной проход 190 состоит из одного или более постоянных отверстий в крышке 56 корпуса, связанных по текучей среде с впускной полостью 188 (Фиг. 10) между выпускным уплотнением 200 и вспомогательной заслонкой 172. По существу неподвижная впускная полость 188 предназначена для периодической связи по текучей среде с камерой 144 между роторами 28/76. В примере на Фиг. 9-11, где отсутствует регулирование объемной производительности, впускная полость 188 может не быть связана по текучей среде с камерой 144А (в положении максимального объема) через отверстие 196 в ободе 26 ведомого ротора. Когда камера 144 утрачивает связь по текучей среде с впускным патрубком 112, давление рабочей текучей среды в камере 144 может расти по мере уменьшения объема в камере 144. Как видно из Фиг. 15-17, после поворота на 60 градусов, произошло уменьшения объема камеры 144А, при этом он связан по текучей среде с полостью 202 рециркуляции скользящего кольцевого уплотнения через отверстие 196 в ободе ведомого ротора. Полость 202 образована между вспомогательной заслонкой 172 и основной заслонкой 170. Полость 202 может никогда не быть по существу связана по текучей среде с вспомогательным впускным проходом 190 или выпускным проходом 194. Полость 202 может обеспечивать возможность рециркуляции газа в машине из предыдущей камеры, которая была связана по текучей среде через отверстие 196 в ободе ведомого ротора. Когда полость 202 рециркуляции скользящего кольцевого уплотнения начинает периодически входить в связь по текучей среде с камерой 144А, рабочая текучая среда в полости 202 рециркуляции может находиться под более высоким давлением, расширяясь в камеру 144А, где давление ниже. Так как камера 144А в это время может не быть связана по текучей среде с вспомогательным впускным проходом 190, такое расширение может вызывать рост давления в камере 144А. В данной конфигурации возможна потеря мощности, так как сжатие и последующий процесс расширения могут не быть термодинамически обратимыми, если температура колеблется. При этом, поскольку в этом положении камера 144А не связана по текучей среде с впускными проходами 186/190, следует понимать, что эти потери мощности не являются существенными в масштабе общего потребления мощности ротационной машиной 20. В примере на Фиг. 18-20, после поворота на 90 градусов, выпускная полость 192 может быть связана по текучей среде с камерой 144С через отверстие 196 в ободе ведомого ротора. Следует понимать, что камера 144А в 210-градусном положении, как ожидают, должна иметь объем, эквивалентный объему камеры 144С на Фиг. 18-20, и выглядеть идентично ей, что предполагает такой же характер выпуска, как показан стрелкой 616. Также следует понимать, что, если бы основная заслонка 170 находилась по окружности ближе к выпускному уплотнению 200, то следовало бы ожидать, что в камере 144С все еще происходил бы ход сжатия, а также то, что в данном сценарии степень сжатия была бы даже выше, чем в раскрытом примере. Выпускная полость 192 может быть связана по текучей среде с выпускным патрубком 234 через выпускной проход 194 (Фиг. 36). Таким образом, давление рабочей текучей среды в камере 144 (например, камере 144С на Фиг. 18-20) может по существу не превышать давление рабочей текучей среды у выпускного прохода 194, если основная заслонка 170 находится в надлежащем положении для ожидаемой степени сжатия. В одном примере можно попытаться минимизировать потребление мощности от привода путем регулирования положения основной заслонки 170 с помощью системы управления, так как слишком раннее или позднее открытие камеры 144 в выпускной проход 194 может привести к росту потребления мощности. В примере на Фиг. 11-20 положение вспомогательной заслонки 172 не позволяет осуществлять регулирование производительности, а основная заслонка 170 находится в положении для случая с высокой степенью сжатия. Сопоставив пример на Фиг. 9-11 с примером на Фиг. 21-23, где угловое положение также составляет 0 градусов, можно понять, что увеличение впускной полости 188 по окружности происходит за счет регулирования положения вспомогательной заслонки 172. Регулирование основной заслонки 170 по окружности может быть, в некоторой степени, сопоставимо с регулирование вспомогательной заслонки 172 для создания сопоставимой степени сжатия.
[0190] В примере на Фиг. 9-11 валы (40/64) ведомого/ведущего роторов находятся в первом угловом положении, именуемом «0-градусное положение». В примере на Фиг. 11 камера 144А может находиться в положении ее максимально возможного объема, в котором она должна быть изолирована впускной заслонкой 54 на следующей стадии вращения. Форсунки 110А текучей среды/110В не загорожены ведущим ротором 76. В этом положении ожидают, что поток будет минимальным или отсутствовать, так как отверстия 152 впрыска, питающие форсунки 110А/110В текучей среды через аксиальные отверстия в вале 153 (не показаны), по существу не расположены по одной линии с соответствующими проемами (146/148) в гидравлическом узле. В данном примере через отверстия 152 впрыска, расположенные по одной линии с проемами в гидравлическом узле (146/148), может происходить подача охлаждающей среды в камеру 144С (Фиг. 9-11). Частичный вид камеры 144А, близкой к положению максимального объема, представлен на Фиг. 10, где проход из впускной полости 188 через отверстие 196 в ободе может быть изолирован вспомогательной заслонкой 172. В примере на Фиг. 18 ход в камере 144С приближается к концу, когда рабочая текучая среда выходит из отверстия 196 в ободе 26 в выпускную полость 192 до того, как отверстие 196 будет изолировано выпускным уплотнением 200. В этот момент времени форсунки 110 текучей среды (не показаны) могут быть по существу загорожены ведущим ротором 76, могущим по существу препятствовать потоку в камеру независимо от того, расположены ли соответствующие отверстия 152 впрыска по одной линии с проемами (146/148) для пропуска такого потока, что в данном примере не так.
[0191] В примере на Фиг. 21-23 регулирование производительности по рабочей текучей среде и по охлаждающей среде раскрыто для сценария с высокой степенью сжатия, когда валы (40/64) ведомого/ведущего роторов находятся в первом угловом положении.
[0192] В примере на Фиг. 24-26 положения основной заслонки 170 и вспомогательной заслонки 172 по окружности могут быть подходящими для сценария с низкой степенью сжатия, при этом валы (40/64) ведомого/ведущего роторов показаны в первом угловом положении. Положение скользящей гидравлической заслонки 158 по окружности является полностью закрытым для минимизации и/или предотвращения поступления охлаждающей среды в камеру 144.
[0193] В примере на Фиг. 27-29 положения основной заслонки 170 и вспомогательной заслонки 172 по окружности отрегулированы для сценария с низкой степенью сжатия, при котором регулируют производительность по рабочей текучей среде. Валы (40/64) ведомого/ведущего роторов показаны в первом угловом положении, а положение скользящей гидравлической заслонки 158 по окружности является полностью закрытым для минимизации и/или предотвращения поступления охлаждающей среды в камеру.
[0194] В примере на Фиг. 30-32 положения основной заслонки 170 и вспомогательной заслонки 172 по окружности выровнены для сценария с полным перепуском, в котором работа на сжатие по существу не происходит. Например, такое расположение возможно при начальном разгоне валов (40/64) ведомого/ведущего роторов во время запуска. Валы (40/64) ведомого/ведущего роторов находятся в первом угловом положении, а положение скользящей гидравлической заслонки 158 по окружности является полностью открытым, в качестве примера того, как охлаждающая среда может поступать в камеру 144.
Скользящее кольцевое уплотнение/Впуск и выпуск - Пример В
[0195] В примере на Фиг. 102-103 и Фиг. 104В впадины 82А/82В роторов накрыты кольцами 37А/37В, благодаря чему кольца 37А/37В могут быть расположены ближе друг к другу в компактной конфигурации без уменьшения площади под гибридные подшипники роторов, раскрытые в примере А на Фиг. 1 и 2. Учитывая данные компактные аксиальные положения, диаметральные шаги зацепления ведомого/ведущего роторов дополнительно уменьшены свободноопертыми/аксиально выступающими элементами 663 колец 37А/37В, на которых расположены зубья 665 шестерен. Без свободноопертой части 663, диаметральные шаги зацепления ведомого/ведущего роторов могли бы быть заметно больше, на что указывают размеры 265/263, например.
[0196] Нижний диаметр колец 37А/37В при той или иной частоте вращения может уменьшать отклонения у зубьев 665 шестерен из-за центробежного нагружения в сдвоенной зубчатой передаче, если аксиально выступающие элементы/свободноопертая часть 663 колец остаются по существу жесткими. При этом все же возможен пропуск газа в камеры 144 через кольцо 37В ведущего ротора через канал для каждой камеры 144 у каждой впадины 82В ведущего ротора. Таким образом, кольцо 37В с каналом в нем (не показан) может работать аналогично ободу 26 с отверстиями 196 в ободе и скользящим кольцевым уплотнением 30 из примера А (Фиг. 1-2). Данный канал у наружного диаметра камеры может быть по существу наполнен газом в конце хода и, в связи с этим, существенно снижать КПД из-за данного объема рециркуляции. На Фиг. 104В-105 в непосредственной близости от впускного канала 191, образованного корпусами 617А/617В ведомого/ведущего роторов, могут находиться только лопасти 78А/78В, но не впадины 82А/82В, когда происходит вращение вала 65 ведущего ротора. Канавки 661 в аксиальных гранях 83В ведущего ротора обеспечивают возможность поддержания связи по текучей среде объемов 144В камер у впадин 82В на стороне ведущего ротора с объемами 144А камер у лопастей 78В на стороне ведущего ротора.
[0197] Первое, второе, третье и четвертое угловые положения роторов показаны в примерах А/В ротационной машины 20 на Фиг. 9-11/119-121, 12-14/122-124, 15-17/125-127, 18-20/128-130 соответственно. Данное сравнение может способствовать пониманию читателем того, как канавки 661 могут обеспечить возможность связи новообразованных камер 144 по текучей среде с впускным каналом 191 посредством связи по текучей среде с примыкающей камерой 144. Например, в первом угловом положении на Фиг. 119, происходит начало образования камеры 144' линиями 232С и 232'В гидравлического уплотнения между поверхностями ротора. При этом линия 232'В уплотнения может не быть эффективна для изоляции камеры 144' от примыкающего каплевидного объема 145, если проходное сечение в канавке 661 достаточно велико. Во втором угловом положении на Фиг. 122 каплевидный объем 145 показан объединенным с камерой 144В, при этом объединенный объем обозначен как камера 144В. В данном примере произошло увеличение камеры 144' в объеме в несколько раз или более. Если бы эта камера была изолирована, давление в камере 144' могло бы упасть в несколько раз или более пропорционально изменению объема. При этом, если линия 232В' уплотнения не эффективна в отношении потока из камеры 144В, поступающего в камеру 144' за счет связи по текучей среде через канавку 661, то давление в камере 144' может быть по существу таким же, как давление в камере 144В. Может быть желательно, чтобы наполнение камеры 144' происходило на ранних этапах образования камеры, так как расширение рабочей текучей среды (газа) в камере может, в противном случае, вызвать падение давления в камере, достаточное для возникновения кавитации жидкого смазочного материала. Кавитация может вызвать нежелательный износ материалов ротора, а указанное расширение - снизить КПД компрессора.
[0198] Во втором угловом положении на Фиг. 123 камера 144В связана по текучей среде с впускным каналом 191. Каждое последующее угловое положение может отражать поворот вала 65 ведущего ротора на 30 градусов. Например, первое угловое положение может указывать на то, что объем камеры 144А является максимально возможным (Фиг. 121) и она все еще связана по текучей среде с впуском, а второе угловое положение (Фиг. 124) на то, что произошло небольшое уменьшение камеры 144А в объеме относительно максимально возможного до того, как связь по текучей среде с впускным каналом 191 будет прервана лопастью 78А ведущего ротора. Из данного примера видно, что поперечное проходное сечение впускного канала 191 можно необязательно увеличить без ущерба для пространства под примыкающие гибридные подшипники 135А/135В ведомого/ведущего роторов, так как может не быть желательно, чтобы карманы подшипника были связаны по текучей среде с впускным каналом 191, как раскрыто в одном из предыдущих разделов. В зависимости от таких факторов, как частота вращения вала ведущего ротора и конкретных геометрических характеристик потока, возможен некоторый перепад давления, обусловленный прохождением потока рабочей текучей среды с по существу высоким расходом через впускной канал 191 в камеры. Этот перепад давления может повлечь уменьшение объемной производительности в машине объемного вытеснения, при этом его можно снизить путем увеличения поперечного проходного сечения впускного канала 191. Определить то, является ли более предпочтительным впускной канал 191 большего размера, выполненный с возможностью поддержания связи по текучей среде с камерами 144 в объеме, немного выходящим за пределы их максимально возможных объемов, можно посредством исследований по способу вычислительной гидродинамики или иным известным способам.
[0199] В некоторых случаях может быть нужен встроенный способ уменьшения объемной производительности. В одном примере мощность приводящего двигателя может не быть достаточна для эксплуатации ротационной машины 20 в номинальном диапазоне частот вращения двигателя. В данном случае потребную мощность приводящего двигателя и объемную производительность ротационной машины 20 позволяет уменьшить встроенная функция регулирования производительности. Диапазон уменьшения от 0 до 100% (и на любое из промежуточных значений) был раскрыт в примере А (Фиг. 1, 2). При этом во многих случаях применения может быть приемлем более ограниченный диапазон встроенной функции уменьшения производительности. Например, некоторые современные двигатели выполнены с возможностью уменьшения частоты вращения до 50% включительно. Из этого может следовать то, что функции встроенного дискретного пошагового уменьшения производительности можно комбинировать с изменением частоты вращения приводящего двигателя для создания непрерывного диапазона регулирования производительности. В случае применения мотора с частотно-регулируемым приводом (ЧРП), последний позволяет обеспечить непрерывный диапазон регулирования производительности с использованием возможностей встроенной функции уменьшения производительности или без них.
[0200] Как видно из Фиг. 124, когда вал ведущего ротора повернут во второе угловое положение, камера 144А может стать изолированной, если вспомогательный впускной проход 193 будет изолирован вспомогательной заслонкой 173, как показано в закрытом положении на Фиг. 108А. Регулировать положение вспомогательной заслонки 173 можно каким-либо известным специалистам в данной области техники способом приведения в действия, например, гидравлическим или электрическим. Данная регулировка может занять несколько секунд, позволяя минимизировать скорость ударного нагружения и использовать небольшую червячную передачу (не показана) в корпусе 167 привода. Входной вал 165 корпуса привода выполнен с возможностью вращения вручную или посредством электрического мотора (не показан), например, для приведения во вращение резьбового элемента 177. Вращение резьбового элемента 177 в одном направлении может вызывать аксиальное перемещение вспомогательной заслонки 173 от закрытого положения (Фиг. 108А) к открытому положению (Фиг. 108В) и наоборот.
[0201] На Фиг. 108В вспомогательная заслонка 173 показана в открытом положении и с возможностью создания связи по текучей среде камеры 144 с рабочей текучей средой во впускной камере 667 через вспомогательный впускной проход 193 и промежуточный проход 195 текучей среды. Поэтому, если перепад давления в проходе 195 текучей среды по существу низкий, давление в камере 144 может быть по существу эквивалентно давлению на впуске. Во втором угловом положении на Фиг. 124 камера 144А может уже не быть связана по текучей среде с основным впускным каналом 191. Если вспомогательная заслонка 173 находится в открытом положении, по мере перехода камеры 144А в третье/четвертое угловые положения на Фиг. 124/Фиг. 127, может происходить уменьшение объема в несколько раз без существенного роста давления, так как поток выходит из вспомогательного впускного канала 193. Следует понимать, что в пятом угловом положении (не показано), камера 144А может выглядеть по существу идентично камере 144С на Фиг. 121. Показано, что в этом положении уже может отсутствовать связь по текучей среде с вспомогательным впускным каналом 193.
[0202] Как видно из Фиг. 119-121 и Фиг. 131, камера 144С может уже быть связана по текучей среде с выпускной камерой 669, если основная заслонка 171 повернута в положение, при котором это возможно, например, в положении на Фиг. 114. Если выпускная камера 669 связана по текучей среде с впускной камерой 667 через камеру 144С, давление в них может быть по существу одинаковым. Отсутствие избыточного давления в камере 144С может быть важно при первоначальном запуске компрессора, так может быть предпочтительно, чтобы наращивание частоты вращения происходило, когда нагружение компрессора минимально. Из Фиг. 131, 132, 133 и 134 видно, что при последовательном постепенном увеличении углового положения вала ведущего ротора с шагом 30 градусов, камера 144С может всегда быть связана по текучей среде с выпускной камерой 669. Основные/вспомогательные впускные каналы 191/193 не должны были быть видны на представленном двухмерном виде в поперечном разрезе, но были добавлены для облегчения понимания читателем того, как камеры 144 (А-С) и соответствующие им выпускные каналы 197 (А-С) могут быть связаны по текучей среде с выпускной камерой 669, когда основная заслонка 171 не загораживает данный проход. Поток рабочей текучей среды, выходящий из камер, обозначен номером 616.
[0203] На Фиг. 135 изображено то же самое первое угловое положение, что и на Фиг. 131, но основная заслонка 171 находится в положении на Фиг. 136, в отличие от положения на Фиг. 114, относящегося к Фиг. 131-134. Объем 203 рециркуляции может иметь по существу разные протяженности по окружности. Данный объем может быть аналогичен объему 202 рециркуляции в примере А ротационной машины (Фиг. 1, 2), так как возможно распространение частично сжатой рабочей текучей среды в следующую по порядку камеру, связанную по текучей среде.
[0204] На Фиг. 135 камера 144С может не быть связана по текучей среде с впускной камерой 667, выпускной камерой 669 или примыкающими камерами (144' и 144В). Поэтому давление в камере 144С может возрастать до тех пор, пока не будет установлена связь по текучей среде с выпускной камерой 669. Следует понимать, что изменения положений основной заслонки 171 соответствуют изменениям потребностей в повышении давления от давления на впуске до давления на выпуске. В случае применения встроенной функции уменьшения производительности для увеличения связи по текучей среде между камерой 144 и впускной камерой 667, можно соответствующим образом отрегулировать основную заслонку 171 для минимизации потерь КПД из-за раннего открытия или потерь КПД и проблем с безопасностью, связанных с чрезмерным повышением давления в камере в случае позднего открытия. Регулирование положения вспомогательной заслонки 173 - это один из примеров встроенной функции уменьшения производительности. Следует понимать, что возможно применение нескольких вспомогательных заслонок 173 или иных средств регулирования производительности/встроенной функции уменьшения производительности без отступления от сущности настоящего изобретения.
[0205] Положение основной заслонки 171 по окружности на Фиг. 131-135 можно регулировать известными способами приведения в действия, например, гидравлическим или электрическим. На Фиг. 103 небольшая червячная передача 187 на входном валу 189 показана во взаимном зацеплении с шестерней 185. Вращение входного вала 189 можно осуществлять вручную или иными известными способами для относительно медленного регулирования углового положения/положения по окружности основной заслонки 171 посредством шестерни 185. Поток, поступающий в компрессор по основным/вспомогательным впускным каналам 191/193, может поступать в камеру 144. Поступив в камеру 144, поток может поступать в выпускную камеру 669 через соответствующий выпускной канал 197 камеры. В раскрытом примере выпускной канал 197 расположен по существу у внутреннего диаметра камеры 144. Если центробежное нагружение вызывает переброс более тяжелых жидких элементов к наружному диаметру камеры в отличие от более легких газообразных элементов рабочей текучей среды, может произойти по существу наполнение объема рециркуляции в выпускном канале 197 жидкостью при попытке части жидкости выйти из камеры в конце хода. Так как жидкости по существу не поддаются сжатию, действительный объем рециркуляции, который по существу связан с потерями КПД компрессора, может быть частью объема рециркуляции, наполненного газом. Поэтому может быть желательно, чтобы выпускной канал был расположен у внутреннего диаметра камеры 144, как показано. Кроме того, может быть желательно, чтобы конец выхода выпускного канала 197 был расположен у внутреннего диаметра ведомого ротора и имел по существу постоянный диаметр, как показано. Это может способствовать созданию более высокого соотношения жидкости и газа в указанном канале в конце хода и улучшению полного КПД.
Узел уплотнения вала - Пример А
[0206] В настоящем документе раскрыто, что рабочая текучая среда может поступать в ротационную машину 20 и выходить из нее. Уплотнения вблизи камеры может препятствовать поступлению рабочей текучей среды в нежелательные зоны в ротационной машине 20. В патенте США №4,078,809 предложен узел уплотнения вала для ротационной машины. При этом для предложенного в нем изобретения может быть нужен «буферный газ» и дополнительное аксиальное расстояние. Так как данные потребности могут отрицательно повлиять на общий размер, вес и себестоимость ротационной машины 20, ниже раскрыто улучшение для Примера А (Фиг. 1, 2).
[0207] На Фиг. 94-97 раскрыт пример, в котором скользящее кольцевое уплотнение 30 на Фиг. 6, 7 и Фиг. 37 модифицировано относительно раскрытого выше для вмещения примыкающего узла 566 уплотнения вала ведомого ротора. В примере на Фиг. 96 гайку 182 скользящей заслонки можно прикрепить на корпус 180 скользящей заслонки для аксиальной фиксации кольца 174 основной заслонки, распорной детали 178 скользящей заслонки и кольца 176 вспомогательной заслонки. Узел 566 уплотнения вала ведомого ротора в данном примере содержит гайку 568 уплотнения, уплотнение 570, распорную деталь 572, передний лабиринт 574, кольцо 576 вала и задний лабиринт 578. Согласно одной последовательности сборки, до установки скользящего кольцевого уплотнения 30, распорную деталь 572 и уплотнение 570 можно аксиально закрепить гайкой 568 уплотнения. Передний лабиринт 574, кольцо 576 вала и задний лабиринт 578 можно прикрепить к валу 40 ведомого ротора способом соединения в натяг. Канавка 580 может заключить в себе разрезное кольцо (не показано), могущее удерживать передний лабиринт 574, кольцо 576 вала и задний лабиринт 578 от аксиального перемещения при наличии существенных аксиальных нагрузок (например, вызванных давлением). Передний лабиринт 574 может быть расположен вблизи обода 26 или в соприкосновении с ним, что позволяет уменьшить связь по текучей среде, могущую возникнуть между полостями 192, 188 и 202 скользящего кольцевого уплотнения (Фиг. 12-14). Внутренние поверхности неподвижных компонентов (568, 570 и 572) узла вала могут быть расположены поблизости от проходящих дальше всего радиально наружу поверхностей вращающихся компонентов (574, 576 и 578) узла вала или в соприкосновении с ними. Высоконапорная текучая среда может поступать в узел 566 уплотнения вала ведомого ротора через отверстие 582, связанное по текучей среде с отверстиями 584 в распорной детали 572. Уплотнение 570 может исходно находиться в соприкосновении с кольцом 576 вала, когда отсутствует существенный градиент давлений на уплотнении. Если давление на передней стороне (т.е. со стороны камеры) уплотнения выше давления на задней стороне уплотнения, может произойти отклонение поверхностей уплотнения 570 дальше в сторону кольца 576 вала. Таким образом, если поверхности уплотнения являются гибкими/податливыми, как в случае кромочного уплотнения, уплотнение 570 может препятствовать истечению рабочей текучей среды на задней стороне уплотнения, когда ротационная машина 20 не работает. При этом, когда происходит вращение вала 40 ведомого ротора с существенной частотой, может происходить износ поверхностей уплотнения в обычном случае применения по существу до такой степени, что оно теряет функциональность. Например, максимальная скорость для политетрафторэтилена (ПТФЭ, англ. PTFE) обычно составляет 40 м/сек. В одном примере кромочные уплотнения обычно рассчитаны на то, что их поверхности будут постоянно находиться в соприкосновении с противоположным вращающимся компонентом. Ожидаемый износ уплотнения может зависеть и от скорости относительного перемещения поверхности у поверхности соприкосновения, и от величины градиента давлений, вызывающего отклонение уплотнения к вращающемуся компоненту. Поэтому может быть предпочтительно использовать пленку напорной текучей среды для поддержания небольшого зазора у поверхностей уплотнения во время работы, что позволяет решить проблему износа, существующую в обычных случаях применения, за счет минимизации или предотвращения соприкосновения между компонентами во время работы. Если давление высоконапорной текучей среды, подаваемой у задней стороны уплотнения (во время работы), достаточно превышает давление у передней стороны (т.е. со стороны камеры) уплотнения, уплотнение может отставать от кольца вала, при этом уплотнение фактически не будет находиться в соприкосновении с валом. Таким образом, сочетание воздействия более высокого давления на переднюю сторону податливого уплотнения (например, кромочного уплотнения) во время работы и воздействия более высокого давления на заднюю сторону уплотнения во время останова позволяет получить возможный способ создания барьера для рабочей текучей среды в обоих случаях, даже в примерах с высокой частотой вращения, что обычно является одной из самых трудных задач при проектировании. В традиционных поршневых компрессорах существенный объем рабочей текучей среды (например, метана) утекает через набивные уплотнения компрессора. Раскрытый выше способ позволяет создать компрессор, из которого не будет утекать рабочая текучая среда. Может быть нужно ограничивать градиент давлений на уплотнении во избежание перенапряжения компонента из-за чрезмерного отклонения. Желательно, чтобы минимальный градиент давлений был таким, чтобы поток поднимал поверхности уплотнения и предотвращал перегрев с одновременной минимизацией скорости утечки. Указанная пленка текучей среды может истекать в сторону камеры, при этом скорость утечки и давление регулирует передний лабиринт 574. Положительный градиент давлений позволяет предотвратить прохождение рабочей текучей среды за уплотнение во время работы. Например, возможно нарушение положительного градиента давлений на уплотнении в случае отключения насоса, подающего высоконапорную текучую среду. В таком случае ротационную машину 20 можно отключить. Рабочая текучая среда более высокого давления может вытеснять любую текучую среду, скопившуюся в переднем лабиринте 574, к передним граням уплотнения до тех пор, пока уплотнение не войдет в зацепление с кольцом 576 вала. Отверстие 586 может быть связано по текучей среде с канавками 588 в распорной детали 572, образующими полость, давление в которой может быть ниже, чем давление, подводимое через отверстие 582. Поэтому высоконапорная текучая среда, подаваемая из отверстия 582 и отверстий 584, может истекать из камеры к задней стороне заднего лабиринта 578. Задний лабиринт 578 может минимизировать происходящую утечку. Лабиринты могут обеспечивать преимущества в местах расположения переднего лабиринта 574 и заднего лабиринта 578, так как они могут регулировать расход потока, и могут быть выполнены из более мягкого материала, чем гайка 568 уплотнения и распорная деталь 572. Более мягкий материал, в отличие от более податливой геометрии, позволяет смягчить проблемы, связанные с сочетанием допусков в ротационной машине 20, в которой возможен износ лабиринтов, изначально находящихся в соприкосновении с неподвижными компонентами. Изначальное соприкосновение с неподатливым материалом может привести к утрате работоспособности ротационной машины 20. Аналогичным образом, в случае перемещения вала 40 ведомого ротора радиально в сторону неподвижных компонентов под действием нагрузок (например, вызванных давлением), соприкосновение неподатливых компонентов может привести к чрезмерному образованию тепла и утрате работоспособности ротационной машины 20.
[0208] На Фиг. 98-101 раскрыт пример, в котором впускная заслонка 54 на Фиг. 6, 7 выполнена аксиально более короткой, чем в других примерах, для вмещения примыкающего узла 592 уплотнения вала ведущего ротора. Узел 592 уплотнения вала ведущего ротора содержит гайку 568 уплотнения, уплотнение 570, распорную деталь 572, передний лабиринт 574, кольцо 576 вала и задний лабиринт 578. Распорную деталь 572 и уплотнение 570 можно аксиально закрепить гайкой 568 уплотнения. Передний лабиринт 574, кольцо 576 вала и задний лабиринт 578 можно прикрепить к валу 64 ведущего ротора способом соединения в натяг. Канавка 580 может заключить в себе разрезное кольцо (не показано), могущее удерживать передний лабиринт 574, кольцо 576 вала и задний лабиринт 578 от аксиального перемещения при наличии существенных аксиальных нагрузок (например, вызванных давлением). Внутренние поверхности неподвижных компонентов (568, 570 и 572) узла вала могут быть расположены поблизости от проходящих дальше всего радиально наружу поверхностей вращающихся компонентов (574, 576 и 578) узла вала или в соприкосновении с ними. Высоконапорная текучая среда может поступать в узел 592 уплотнения вала ведущего ротора через отверстие 582, связанное по текучей среде с отверстиями 584 в распорной детали 572. Уплотнение может быть гибким/податливым и работать так же, как раскрыто выше для узла 566 уплотнения вала ведомого ротора. Следует понимать, что все компоненты (568, 570, 572, 574, 576 и 578) узла уплотнения вала ведущего ротора могут быть аналогичны соответствующим компонентам (568, 570, 572, 574, 576 и 578) узла уплотнения вала ведомого ротора и работать аналогичным образом.
Узел уплотнения вала - Пример В
[0209] В примере на Фиг. 102, 103 единственным динамическим уплотнением является торцовое уплотнение 631 на валу ведущего ротора - позиция, приобретаемая у поставщиков комплектующих для вращающегося оборудование и служащая для изоляции рабочей текучей среды. Отсутствие изнашиваемых компонентов в ротационной машине 20 может быть крайне желательным с точки зрения затрат на техобслуживание и надежности. Детандер-компрессорный агрегат двойного действия
[0210] В некоторых случаях применения желательно, чтобы ротационная машина 20 работала последовательно как компрессор и как детандер. В патенте W 2017/19872 А1 сказано: «изобретение предназначено, главным образом, для производства высоконапорного газа, в частности - воздуха, и использования его потенциальной энергии для передачи мощности и аккумулирования энергии». Это позволяет «преодолеть недостатки, связанные с прерывистостью функционирования некоторых возобновляемых источников энергии, например, солнечных и ветровых генераторов». Спиральные или винтовые установки конструктивно выполнены с возможностью функционирования в качестве компрессоров во время работы в одном направлении и в качестве детандеров, когда вращение вала происходит в противоположном направлении. И тот, и другой являются устройствами объемного вытеснения, создающими линии уплотнения, ограничивающие камеры, объем которых уменьшают для сжатия газа или увеличивают при вращении вала в противоположном направлении для расширения газа. Данный случай применения, как и многие другие, продемонстрировал потенциальные преимущества возможности сжатия/расширения, в частности изотермического сжатия/расширения, в одной и той же установке. В частности, это возможно, если один и тот же вал механически соединен с установкой, выполненной с возможностью функционирования как в качестве мотора, так и генератора, в зависимости от направления вращения. В данном случае применения, давление на выпуске спиральных/винтовых установок предпочтительно составляет от 10 до 40 бар (145-580 фнт./кв.дюйм изб.). Насколько известно автору, отсутствуют серийно производимые детандер-компрессорные агрегаты с подтвержденным опытом надежной работы за пределами значения 350 фнт./кв.дюйм изб. Даже если имеются какие-либо агрегаты с давлениями на выпуске до 580 фнт./кв.дюйм изб. включительно, все же существует потребность в создании гораздо более высокого давления воздуха для некоторых случаев применения и в дополнительной выработке энергии для накопителей энергии на сжатом воздухе (НЭСВ). Необходимое давление может составлять порядка нескольких тысяч фнт./кв.дюйм изб. Способы, предложенные в патенте W 2017/19872 А1, направлены на создание давлений, превышающих возможности установок, могущих осуществлять как сжатие, так и расширение. Для создания давления за пределами данного диапазона, возможно применение отдельных технологических линий, состоящих из компрессоров (например, мультипликаторных центробежных компрессоров), соединенных с моторами, и отдельных технологических линий, состоящих из детандеров (например, турбодетандеров), которые могут быть соединены с генераторами. Они представляют собой относительно дорогостоящие многоступенчатые линии адиабатического сжатия и адиабатического расширения, для которых обычно нужно межступенчатое охлаждение. Специалистам в данной области техники может быть очевидно, что, если будет доказана способность ротационной машины 20 надежно повышать давление с атмосферного до тысяч фнт./кв.дюйм изб. по существу изотермически, ее применение может быть желательно для накопителя энергии на сжатом воздухе (НЭСВ). Например, спиральные/винтовые установки, речь о которых идет в Заявке на патент США 2017/19872 А1, можно заменить одноступенчатой ротационной машиной 20, а резервуар буферного газа, куда происходил выпуск из спиральных/винтовых установок (в режиме сжатия), может служить в качестве конечной емкости для воздуха или каверны, что устраняет необходимость во многих единицах оборудования.
[0211] Принципы уменьшения или увеличения камеры в размере для сжатия/расширения аналогичны для спиральных/винтовых детандер-компрессорных агрегатов, так как все они являются устройствами объемного вытеснения. Во время работы в качестве компрессора, камеры 144, как раскрыто в примере А (Фиг. 1, 2), находятся в положении максимального объема, когда они связаны по текучей среде с впускным устройством 112, и имеют меньший объем, когда выпускной канал 234 связан по текучей среде с камерой 144. Было раскрыто, что положение основной заслонки 170, когда давление в камере 144 становится по существу равным давлению у выпускного канала 234, обеспечивает возможность установления связи указанных двух объемов по текучей среде вскоре после этого. Примеры изменений размеров камеры раскрыты на Фиг. 9-20 и Фиг. 119-130 (пример В). Следует понимать, что геометрия роторов и камеры 144 в обоих примерах по существу идентичны, а различия состоят в том, как рабочая текучая среда входит в камеры 144 и выходит из них. В режиме сжатия привод должен воздействовать на газ для вращения вала, как показано. Если бы ведущий ротор был отсоединен от вала или мог бы вращаться свободно, давление газа могло бы вызвать вращение вала в противоположном направлении. В примере В высоконапорный газ в выпускной камере 669 может наполнять камеру 144С в четвертом, третьем, втором и далее в первом угловых положениях, как раскрыто на Фиг. 134, 133, 132 и 131 соответственно, по мере увеличения камеры 144С в объеме. Впоследствии выпускной канал 197С камеры 144С может быть изолирован в следующем угловом положении и мог бы выглядеть по существу идентично выпускному каналу 197А камеры 144А на Фиг. 134. На Фиг. 133 выпускной канал 197А связан по текучей среде с полостью 203 рециркуляции, давление в которой может быть ниже до тех пор, пока не произойдет смешивание. В следующем угловом положении на Фиг. 132 и Фиг. 122-124, если никакая встроенная функция регулирования производительности не нужна, так как вспомогательный впускной проход по существу загорожен, камера 144А может быть изолирована. На Фиг. 131 и Фиг. 119-121 показано, что камера 144А связана по текучей среде с основным впускным каналом 191 с возможностью выхода рабочей текучей среды из низконапорной впускной камеры 667 ротационной машины 20.
[0212] По мере увеличения объема камеры 144, когда она изолирована, давление может падать до тех пор, пока не будет установлена связь камеры по текучей среде с низконапорной впускной камерой 667 по основному и/или вспомогательному впускным каналам 191/193. Предпочтительно, вал ведущего ротора соединен с мотором/генератором для процессов сжатия/расширения, несмотря на то, что за счет работы на валу ведущего ротора можно приводить в действие другую единицу оборудования. Для одного и того же положения основной заслонки 171, степень расширения может быть по существу аналогична предыдущей степени сжатия. Пиковые и средние нагрузки могут быть по существу такими же, как в обратном процессе сжатия, при этом кривая нагружения может быть в некоторой степени обратной/зеркально симметричной. Положение основной заслонки 171 можно регулировать для обеспечения возможности изменения степени расширения. Когда вспомогательная заслонка 173 находится в аксиальном положении на Фиг. 108В, вспомогательный впускной канал 193 не загорожен, в связи с чем можно ожидать уменьшения объемной производительности и мощности. В одном примере встроенная функция регулирования производительности может быть предпочтительна в том случае, если присоединенный генератор или устройство, использующее мощность, подводимую от вала 65 ведущего ротора, не способно использовать ожидаемую мощность без уменьшения регулирования производительности. Может быть желательно наличие высокотемпературного газа в выпускной камере 669 до начала процесса расширения с вводом достаточного количества охлаждающей среды для поддержания по существу изотермического (неадиабатического) расширения, так как это позволяет увеличить выработку мощности. Если за процессом расширения следует процесс сжатия, может быть желательно, чтобы показатель политропы составлял менее 1.0, что указывает на то, что КПД выше изотермического, так как температуру рабочей текучей среды понижают после процесса сжатия и повышают ее после процесса расширения посредством охлаждающей текучей среды, которая соответственно холоднее или теплее рабочей текучей среды.
[0213] Для шестерен, гибридных подшипников, основной заслонки и системы охлаждения впрыском могут по существу отсутствовать предпочтения в части направления вращения вала. Может быть предпочтительно подавать масло в разные каналы 157 текучей среды, что можно обеспечить по ходу работы путем открытия то одних, то других клапанов.
Преимущества ротационной машины в сборе
[0214] Подводя итог вышесказанному об основных задачах, которые требовалось решить, ротационная машина 20 значительно отличается по своим конструктивным параметрам, если учесть предельные диапазоны, в которых данная машина способна работать. В случаях с высоким давлением на выпуске происходит значительное ухудшение несущей способности гибридных подшипников 135А/136 и 135В/134 ведомого/ведущего ротора, при этом нужно учитывать повышенное давление слива. В некоторых примерах может быть нужно повысить давление подачи для случаев с высоким давлением на выпуске. В случаях с высоким давлением на выпуске могут возникать исключительно высокие нагрузки, в частности, когда давление всасывания также высоко. Давление подачи в сферические гибридные подшипники, гибридные опорные подшипники и гибридные подшипники у колец можно регулировать по мере необходимости. Совместное применение гибридных подшипников и зубчатых/делительных передач роторов в одном примере позволяет создать ротационный компрессор большого объема с возможностью работы при давлениях на впуске или выпуске по меньшей мере 2000 фнт./кв.дюйм изб. Данный рабочий диапазон может соответствовать большинству случаев коммерческого применения компрессорного оборудования на сегодняшний день, так как указанные давления превышают рабочее давление обычного трубопровода. В одном примере ротационный компрессор может быть выполнен с возможностью повышения давления рабочей текучей среды с по существу атмосферного давления до по меньшей мере 5000 фнт./кв.дюйм изб. Указанная комбинация давлений на впуске и выпуске может подходить для закачки углекислого газа в глубокий подземный пласт в рамках проекта улавливания углерода. Давление подачи в подшипник следует минимизировать в случаях с более низким давлением на выпуске и с более низкой нагрузкой для минимизации необоснованного потребления мощности. В случаях с высокой степенью сжатия и высоким расходом потока нужно впрыскивать значительное количество охлаждающей среды по сравнению со случаями с низкой степень сжатия, где охлаждение даже может не быть нужно. Введение функции охлаждения впрыскиванием в машину 20 обеспечивает возможность работы с очень высокими степенями сжатия. В одном примере повышение давления с по существу атмосферного до по меньшей мере 5000 фнт./кв.дюйм изб. возможно за одну ступень сжатия. В примере А (Фиг. 9-11) положения скользящей гидравлической заслонки 158 и вспомогательной заслонки 172 можно регулировать для регулирования температуры рабочей текучей среды на выпуске. В примере В (Фиг. 102, 103) температуру рабочей текучей среды на выпуске можно регулировать путем подачи охлаждающей текучей среды то в одни, то в другие каналы 157 текучей среды (Фиг. 107-109). При необходимости, скорость работы ротационной машины 20 можно снизить для обеспечения возможности дополнительной теплопередачи в короткий располагаемый срок, что позволяет уменьшить потребные объемы охлаждающей текучей среды в соответствующих случаях. Компоненты машины должны быть конструктивно выполнены с возможностью выдерживать расчетные давления, зачастую с минимальным отклонением в компактной конфигурации. Гибридные подшипники 135А/136, 137А/138, 129А/118, 139А/120 ведомого ротора и гибридные подшипники 135В/134, 137В/72, 129В/118, 139В/120 ведущего ротора имеют небольшие зазоры с возможностью изменения высот зазоров в зависимости от того, находится ли ротационная машина при комнатной температуре или в состоянии термического равновесия. Более того, давление на выпуске и тепловое расширение вала 64/65 ведущего ротора и вала 40/41 ведомого ротора могут зависеть от свойств сжимаемой или расширяемой рабочей текучей среды и нужной степени сжатия. Возможна самокомпенсация отклонения из-за теплового расширения за счет механизмов, раскрытых для гибридных подшипников. При этом в случаях, когда отклонение из-за теплового расширения может значительно превышать высоты зазоров гибридных подшипников в нейтральном положении, потребная сила реакции, ожидаемая от гибридного подшипника, может составлять значительную часть или даже значительно превышать нагрузки давления от камеры 144 или иные нагрузки. Так, в примере А на Фиг. 1, 2, без раскрытых здесь улучшений, изменения теплового расширения (или сжатия) у кольца 38 потенциально могут превысить расчетные размеры зазора, а в некоторых случаях могут превысить несущую способность подшипника, в результате чего возникает соприкосновение металлов. Общий размер, вес, себестоимость, механический КПД, количество деталей и удобство сборки являются важными параметрами проектирования. В примере А на Фиг. 1-8В машины указанные задачи решены следующим образом.
Все компоненты конструктивно выполнены с возможностью выдерживать условия максимального нагружения, могущие возникнуть в любом из случаев в широком расчетном диапазоне. Давление подачи в подшипник регулируют до нужного в текущем расчетном случае. Скользящее кольцевое уплотнение 30 в одном примере выполнено с возможностью работы в диапазоне уменьшения производительности на 0-100% (за вычетом паразитных потерь, например, на трение) без необходимости модификации компонентов и без необходимости останова машины. Уравновешенная по нагрузке скользящая гидравлическая заслонка 158 гидравлического узла 48 выполнена с возможностью регулирования расхода охлаждающей среды от по существу нулевого до 100%-ного потока или любого промежуточного значения. Механизм компенсации теплового расширения у кольца 38 обеспечивает возможность малых высот зазоров у примыкающих поверхностей (118/120) гибридного подшипника. В качестве альтернативы, на Фиг. 102-103 раскрыт еще более компактный пример В, в котором поверхности (129А, 129В, 139А, 139В) гибридного упорного подшипника могут быть аксиально расположены достаточно близко к центрам 77 сферы роторов для по существу уменьшения теплового расширения, чтобы его последствие было достаточно малым в желаемом диапазоне рабочих температур.
[0215] В примере А на Фиг. 1-2 наличие самокомпенсирующихся поверхностей (118/120) гибридного подшипника на регулируемом компоненте объединяет функциональные возможности обоих компонентов. Кольцо 38, конфигурация делительных шестерен 122, конфигурация гибридных подшипников (134/136) ведущего/ведомого ротора, конфигурация подшипников и конфигурация корпуса в сочетании друг с другом позволяют создать максимально компактную и легкую машину и, тем самым, уменьшить размер, вес и материальные затраты. Кольцо 38 служит и в качестве поверхности гибридного подшипника для пошагового перемещения с помощью зубьев шестерен, что обеспечивает возможность короткого расстояния между шестернями, и как способ уменьшения запаздывания кручения в ротационной машине 20. Компактность ротационной машины также обеспечена за счет размещения распылительных форсунок 110 текучей среды большого объема в пределах внутренней усеченно-сферической поверхности 92 ведомого ротора. Слив из радиальных гибридных подшипников (72/138) ведущего/ведомого роторов и гибридных подшипников (118/120) переднего/заднего цилиндров может происходить под давлением, близким к атмосферному давлению, благодаря чему размер и вес корпуса, вмещающего примыкающие низконапорные полости, а также материальные расходы на него, могут быть минимальными при максимальной несущей способности подшипников. В качестве альтернативы, в еще более компактном примере В (Фиг. 102, 103) только с двумя шестернями при необходимости можно реализовать высоконапорную полость 445 шестерни.
Новые отличительные признаки включают в себя следующие, но не ограничиваются ими.
[0216] Ротационная машина (20), содержащая: корпус (55), содержащий вогнутую усеченно-сферическую внутреннюю поверхность (114) корпуса; первый ротор (76), содержащий выпуклую усеченно-сферическую наружную поверхность (62) первого ротора, примыкающую к внутренней поверхности (114) корпуса, по меньшей мере одну лопасть (78), ограничивающую по меньшей мере одну впадину (82), центр (77) первого ротора в центре радиуса наружной поверхности (62) первого ротора; гидростатический подшипник (134) первого ротора, сформированный на наружной поверхности (62) первого ротора; при этом гидростатический подшипник (134) первого ротора содержит: по меньшей мере один канал (108) текучей среды первого ротора через наружную поверхность (62) первого ротора, поверхность, ограничивающую карман (208) подшипника вокруг канала (108) текучей среды первого ротора, площадку (206) вокруг кармана (208) подшипника; при этом площадка (206) выступает радиально наружу от кармана (208) подшипника относительно центра (77) первого ротора (76); при этом площадка (206) непосредственно примыкает к внутренней поверхности (114) корпуса с образованием гидравлического уплотнения у нее. Раскрытая здесь ротационная машина (20) в одном примере дополнительно содержит: гидростатический подшипник (134) первого ротора, образованный структурой 593, включающей в себя по меньшей мере одну площадку (206) первого ротора на наружной поверхности (62) первого ротора каждой лопасти (78); причем структура 593 по существу идентична на каждой лопасти (78) первого ротора (76). Ротационная машина (20) может отличаться тем, что гидростатический подшипник (134) первого ротора образован многомерной структурой 593. Ротационная машина (20) может быть выполнена с гидростатическими подшипниками (134), содержащими: источник текучей среды подшипника под давлением подачи текучей среды подшипника, при этом источник текучей среды подшипника связан по текучей среде с каналом (108) текучей среды первого ротора; источник рабочей текучей среды с каналом текучей среды (186) через корпус (55) в камеру (144), частично ограниченную впадиной (82) первого ротора, при этом рабочая текучая среда подлежит сжатию в камере (144) до давления рабочей текучей среды по мере вращения первого ротора (76) относительно корпуса (55); причем давление подачи текучей среды подшипника выше давления рабочей текучей среды. Раскрытая ротационная машина (20) может дополнительно содержать: второй ротор (28), содержащий выпуклую усеченно-сферическую наружную поверхность (36) первого ротора, примыкающую к внутренней поверхности (114) корпуса, по меньшей мере одну лопасть (78), образующую по меньшей мере одну впадину (82), при этом впадина (82) второго ротора расположена вокруг лопасти (78) первого ротора (76), центр второго ротора в центре радиуса наружной поверхности (36) первого ротора; гидростатический подшипник (136) второго ротора, сформированный на наружной поверхности (36) второго ротора; при этом гидростатический подшипник (136) второго ротора содержит: по меньшей мере один канал (108) текучей среды второго ротора через наружную поверхность (36) второго ротора, поверхность, ограничивающую карман (208) подшипника вокруг канала (108) текучей среды второго ротора, площадку (206) вокруг кармана (208) подшипника; при этом площадка (206) подшипника выступает радиально наружу от кармана (208) подшипника относительно центра (77) первого ротора (76); при этом площадка (206) непосредственно примыкает к внутренней поверхности (114) корпуса. Ротационная машина (20) может отличаться тем, что, по меньшей мере, гидростатический подшипник (134) первого ротора радиально отстоит от впадины (82) первого ротора (76). Ротационная машина (20) может отличаться тем, что гидростатический подшипник (134) первого ротора выполнен с возможностью слива во впадину (82). Ротационная машина (20) может дополнительно содержать: первый вал (64), проходящий от первого ротора (76), при этом первый вал (64) расположен аксиально напротив лопастей (78) первого ротора (76); канал (216) текучей среды, связанный по текучей среде с каналом (108) текучей среды первого ротора; при этом канал (216) текучей среды проходит по существу аксиально вдоль первого вала (64). Ротационная машина (20) может дополнительно содержать: второй вал (40), проходящий от второго ротора и расположенный аксиально напротив лопастей (78) второго ротора (28); канал (212) текучей среды, связанный по текучей среде с гидростатическим подшипником (136) второго ротора; при этом канал (212) текучей среды проходит по существу аксиально вдоль второго вала (40).
[0217] Ротационная машина (20), содержащая: первый ротор (76), содержащий выпуклую усеченно-сферическую наружную поверхность (62) первого ротора, примыкающую к внутренней поверхности (114) корпуса, по меньшей мере одну лопасть (78), образующую по меньшей мере одну впадину (82), центр (77) первого ротора в центре радиуса наружной поверхности (62) первого ротора; при этом первый ротор (76) содержит поверхность (86) вставки первого ротора у центра радиуса лопасти (78), впадину (82), при этом поверхность (86) вставки первого ротора имеет ось, по существу параллельную оси (639) вращения первого ротора (76); вставку (94), расположенную с возможностью удаления в пределах поверхности (86) вставки первого ротора; при этом вставка (94) выполнена с возможностью взаимодействия со вторым ротором (28) и образования гидравлического уплотнения у него. Ротационная машина (20) может дополнительно содержать: вставку (94), содержащую усеченно-сферическую внутреннюю поверхность (98); и усеченно-сферическую вставку (92/96), вставленную с возможностью удаления в усеченно-сферическую внутреннюю поверхность (98) вставки (94). Ротационная машина (20) может дополнительно содержать: второй ротор (28), содержащий поверхность (86) вставки второго ротора у центра радиуса лопасти (78), впадину (82) второго ротора (28), при этом поверхность (86) второй вставки имеет ось, по существу параллельную оси вращения (637) второго ротора (28); вставку (90), расположенную с возможностью удаления в пределах поверхности (86) вставки второго ротора; при этом вставка (90) второго ротора выполнена с возможностью взаимодействия с вставкой (94) первого ротора (76) с образованием гидравлического уплотнения у нее. Ротационная машина (20) может дополнительно содержать: по меньшей мере одну форсунку (110) текучей среды на вставке (90); при этом по меньшей мере одна форсунка (110) текучей среды расположена по существу по одной линии с впадинами (82) второго ротора (28); по меньшей мере один канал (153) текучей среды вставки, проходящий через вставку (90) ко второму ротору (28) по существу параллельно оси вращения второго ротора (28); при этом канал (153) текучей среды вставки проходит через второй ротор (28). Ротационная машина (20) может отличаться тем, что форсунки (110) текучей среды съемно прикреплены к вставке (90). Ротационная машина может отличаться тем, что в форсунки (110) текучей среды выборочно подают охлаждающую среду. Ротационная машина (20) может дополнительно содержать: второй ротор (28), прикрепленный к валу (40), содержащему по существу цилиндрическую наружную поверхность; проемы (152) текучей среды в поверхности вала, проходящие по существу аксиально в пределах второго вала (40) от каналов (153) текучей среды вставки; при этом канал (150) корпуса на корпусе (55) расположен по одной линии с проемами (152) в поверхности вала для обеспечения прохода текучей среды от корпуса (55) вокруг вала (40) к форсункам (110) текучей среды. Ротационная машина может дополнительно содержать: множество радиально противоположных проемов (152) в поверхности вала, соединенных по текучей среде с каждым каналом вставки (153). Ротационная машина (20) может дополнительно содержать: скользящий цилиндр (158), прикрепленный к корпусу (55), охватывающий вал (40) вокруг проемов (152) в поверхности вала; при этом скользящий цилиндр (158) содержит множество поверхностей, ограничивающих проемы (146) в нем; при этом происходит последовательное выравнивание проемов (146) по одной линии с одним или более проемами (152) в поверхности вала с образованием временного канала текучей среды между каналом (150) текучей среды корпуса и форсунками (110) текучей среды. Ротационная машина (20) может отличаться тем, что цилиндр (154) включает в себя: внутренний цилиндр (156) с поверхностями, ограничивающими проемы (148) в нем; скользящий цилиндр (158) с поверхностями, ограничивающими проемы (146) в нем, расположенные по одной линии с поверхностями, ограничивающими проемы (148) во внутреннем цилиндре (156); при этом скользящий цилиндр (158) плотно соединен с внутренним цилиндром (156) и выполнен с возможностью вращения относительно него для регулирования выравнивания поверхностей, ограничивающих проемы (146) в скользящем цилиндре, относительно поверхностей, ограничивающих проемы (148) во внутреннем цилиндре, для выборочного ограничения потока текучей среды к форсункам (110). Ротационная машина (20) может дополнительно содержать: внутренний цилиндр (627) с поверхностями, ограничивающими проемы (159) в нем; при этом в проемы (159) во внутреннем цилиндре (627) выборочно подают текучую среду. Ротационная машина (20) может отличаться тем, что внутренняя поверхность (86) первого ротора геометрически выполнена по форме, выбранной из перечня, включающего в себя: усеченный цилиндр, усеченный конус и многогранную призму.
[0218] Ротационная машина (20), содержащая: корпус (55); второй ротор (28) с валом (40) ротора в пределах корпуса (55), наружную поверхность с гидростатическим подшипником (134), выполненным с возможностью взаимодействия с внутренней поверхностью (114) корпуса; кольцо (38), установленное на валу (40) ротора; при этом кольцо (38) содержит переднюю поверхность, аксиально обращенную ко второму ротору (28); при этом кольцо (38) содержит тыльную поверхность, аксиально обращенную в сторону, противоположную второму ротору (28); передний сам о компенсирующийся гидростатический подшипник (118), выполненный с возможностью взаимодействия с передней поверхностью кольца (38); причем передний самокомпенсирующийся гидростатический подшипник (118) уравновешивает прикладываемое гидростатическим подшипником (134) усилие между наружной поверхностью второго ротора и внутренней поверхностью (114) корпуса (55). Ротационная машина (20) может дополнительно содержать: задний самокомпенсирующийся гидростатический подшипник (120), выполненный с возможностью взаимодействия с тыльной поверхностью кольца (38); причем задний самокомпенсирующийся гидростатический подшипник (120) выполнен с возможностью уравновешивания усилия, прикладываемого вызванным давлением усилием рабочей текучей среды в камере сжатия (144), частично ограниченной корпусом (55). Ротационная машина (20) может дополнительно содержать: зубчатую передачу, механически соединяющую второй ротор (28) с первым ротором (76); причем кольцо (38) взаимодействует с зубчатой передачей для пошагового перемещения второго ротора (28) к первому ротору (76).
[0219] Ротационная машина (20), содержащая: корпус (55); второй ротор (28) с валом (40) ротора в пределах корпуса (55), наружную поверхность с гидростатическим подшипником (134), выполненным с возможностью взаимодействия с внутренней поверхностью (114) корпуса; кольцо (38), установленное на валу (40) ротора; при этом кольцо (38) содержит переднюю поверхность, аксиально обращенную ко второму ротору (28); при этом кольцо (38) содержит тыльную поверхность, аксиально обращенную в сторону, противоположную второму ротору (28); задний самокомпенсирующийся гидростатический подшипник (42120), выполненный с возможностью взаимодействия с тыльной поверхностью кольца (38); причем задний самокомпенсирующийся гидростатический подшипник (42120) выполнен с возможностью уравновешивания усилия, прикладываемого вызванным давлением усилием рабочей текучей среды в камере (144).
[0220] Ротационная машина (20), содержащая: корпус (55), содержащий вогнутую усеченно-сферическую внутреннюю поверхность (114) корпуса; первый ротор (76) с выпуклой усеченно-сферической наружной поверхностью (62) первого ротора, примыкающей к внутренней поверхности (114) корпуса, лопасти (78), образующие впадины (82) между ними; центр (77) первого ротора в центре радиуса наружной поверхности (62) первого ротора; второй ротор (28) с усеченно-сферической наружной поверхностью (36) второго ротора, лопасти, образующие впадины между ними, центр второго ротора (77) в центре радиуса наружной поверхности (36) второго ротора; зубчатую передачу, содержащую: первую шестерню (38В), соединенную с первым ротором (76); вторую шестерню (38В), соединенную со вторым ротором (28); третью шестерню (122В), входящую в зацепление с первой шестерней (38В); и четвертую шестерню (122А), входящую в зацепление с третьей шестерней (122В) и второй шестерне и (38А); при этом зубчатая передача тем самым передает момент вращения между первым ротором (76) и вторым ротором (28). Ротационная машина может отличаться тем, что: третья шестерня (122В) и четвертая шестерня (122А) прикреплены к общему валу (126') с возможностью вращения вместе с ним.
[0221] Гидростатический подшипник (620), содержащий: первую наружную площадку (290) подшипника, окружающую по меньшей мере один карман (284) подшипника; прилегающий компонент (671) с прилегающей поверхностью (671'), непосредственно примыкающей к первой наружной площадке (290) подшипника; причем гидростатический подшипник (620) выполнен с возможностью перемещения относительно прилегающей поверхности (671) прилегающего компонента (671); по меньшей мере один первый канал (270/394) текучей среды, окруженный первой площадкой подшипника; при этом первый канал (270) текучей среды выполнен с возможностью подачи текучей среды подшипника под давлением через гидростатический подшипник (620) между карманом (284) подшипника и поверхностью (671'). Гидростатический подшипник (620) может дополнительно содержать: по меньшей мере одну первую площадку (272) ограничителя, образующую ограничение, окружающее первый канал (270) текучей среды; по меньшей мере одну первую канавку (274) ограничителя, окружающую первую площадку (272) ограничителя; промежуточную площадку (276), непосредственно примыкающую к прилегающей поверхности (671'); при этом промежуточная площадка (276) окружает первую канавку (274) ограничителя; при этом карман (284) подшипника и первая наружная площадка (290) подшипника окружают промежуточную площадку (276). Гидростатический подшипник (620) может дополнительно содержать: по меньшей мере одну первую площадку (272) ограничителя, образующую ограничение, окружающее первый канал (270) текучей среды; по меньшей мере одну первую канавку (274) ограничителя, окружающую первую площадку (272) ограничителя; промежуточную площадку (276), непосредственно примыкающую к прилегающей поверхности (671'); при этом промежуточная площадка (276) окружает первую канавку (274) ограничителя; при этом карман (284) подшипника и первая наружная площадка (290) подшипника расположены напротив промежуточной площадки (276). Гидростатический подшипник (620) может дополнительно содержать: вторую наружную площадку (290QGH) подшипника, диаметрально противоположную первой наружной площадке подшипника; при этом вторая наружная площадка (290QGH) подшипника окружает по меньшей мере один карман (284) подшипника; прилегающий компонент (671) с прилегающей поверхностью (671'), непосредственно примыкающей к второй наружной площадке (290QGH) подшипника; по меньшей мере один первый канал (270) текучей среды, окруженный второй наружной площадкой (290QGH) подшипника; при этом первый канал (270) текучей среды выполнен с возможностью подачи текучей среды подшипника под давлением через гидростатический подшипник (620) между карманом (284) подшипника и поверхностью (671). Гидростатический подшипник (620) может отличаться тем, что вторая наружная площадка (290QGH) подшипника диаметрально противоположна первой наружной площадке (290) подшипника и латерально отстоит от нее. Гидростатический подшипник (620) может отличаться тем, что вторая наружная площадка (290QGH) подшипника диаметрально противоположна первой наружной площадке (290) подшипника и латерально отстоит от нее на поверхности вала, причем вторая наружная площадка подшипника радиально противоположна первой наружной площадке подшипника и латерально отстоит от нее относительно оси вращения вала. Гидростатический подшипник (620) может дополнительно содержать: вторую наружную площадку (290QGH) подшипника, латерально примыкающую к первой наружной площадке подшипника; при этом вторая наружная площадка (290QGH) подшипника окружает по меньшей мере один карман (284) подшипника; при этом прилегающая поверхность (671') непосредственно примыкает ко второй наружной площадке (290QGH) подшипника; по меньшей мере один канал (270) текучей среды, окруженный второй площадкой (290QGH) подшипника; при этом канал (270) текучей среды выполнен с возможностью подачи текучей среды подшипника под давлением через гидростатический подшипник (620) между карманом (284) подшипника и поверхностью (671'). Гидростатический подшипник (620) может дополнительно содержать: второй канал (286) текучей среды; при этом второй канал (286) текучей среды непосредственно связан по текучей среде с карманом (284) подшипника. Гидростатический подшипник (620) может дополнительно содержать: третий канал (286) текучей среды; при этом третий канал (604) текучей среды непосредственно связан по текучей среде с первой канавкой (274) ограничителя. Гидростатический подшипник (620) может дополнительно содержать: вторую наружную площадку (290QGH) подшипника, диаметрально противоположную первой наружной площадке (290) подшипника; при этом вторая наружная площадка (290QGH) подшипника окружает по меньшей мере один карман (284) подшипника; прилегающий компонент (671) с прилегающей поверхностью (671'), непосредственно примыкающей ко второй наружной площадке (290QGH) подшипника; по меньшей мере один первый канал (270) текучей среды, окруженный второй наружной площадкой (290QGH) подшипника; при этом первый канал (270) текучей среды, окруженный второй наружной площадкой (290QGH) подшипника, связан по текучей среде с каналом (270/394) текучей среды, окруженным первой площадкой подшипника. Гидростатический подшипник (620) может дополнительно содержать: капиллярный ограничитель (348), установленный в канал (108) текучей среды первого ротора. Гидростатический подшипник (620) может дополнительно содержать: капиллярную трубку (344), установленную в капиллярный ограничитель (348).
[0222] Ротационная машина (20), содержащая: узел (31) основной скользящей заслонки, в свою очередь содержащий: выпускную камеру (669), выборочно соединяющую по текучей среде камеру (144), ограниченную частично лопастями (78) и впадинами (82) первого ротора (76), лопастями (78) и впадинами (82) второго ротора (28) и внутренней поверхностью корпуса (55) вокруг первого ротора (76) и второго ротора (28); выпускной канал (197), связанный по текучей среде с камерой (144); и основную заслонку (171), выборочно создающую связь по текучей среде между выпускным каналом (197) и выпускной камерой (669). Ротационная машина (20) может отличаться тем, что выпускная камера (669) включает в себя внутреннюю поверхность вала (41), прикрепленного ко второму ротору (28В). Ротационная машина (20) может отличаться тем, что основная заслонка (171) аксиально проходит в выпускную камеру (669). Ротационная машина (20) может отличаться тем, что основная заслонка (171) прикреплена к корпусу (55).
[0223] Ротационная машина (20), содержащая: первый ротор (76), содержащий по меньшей мере одну лопасть (78В), по меньшей мере одну впадину (82В), ось (639) вращения; второй ротор (28В), содержащий по меньшей мере одну лопасть (78А), по меньшей мере одну впадину (82А), ось вращения (637), смещенную относительно оси вращения первого ротора и пересекающую ее; при этом лопасть первого ротора и впадина второго ротора образуют камеру (144А) первого ротора; при этом лопасть второго ротора и впадина первого ротора образуют камеру (144В) второго ротора; и канавку (661) в аксиальной грани (83В) первого ротора, образующую канал текучей среды между камерой (144А) первого ротора и камерой (144В) второго ротора. Ротационная машина (20) может отличаться тем, что канал текучей среды, образованный канавкой (661), время от времени изолируют. Ротационная машина (20) может дополнительно содержать выпускной канал (197А) во впадине (82А) второго ротора (28). Ротационная машина (20) может дополнительно содержать канал (669) текучей среды, связанный по текучей среде с выпускным каналом (197А), и вал (4141), прикрепленный ко второму ротору (28).
[0224] Форсунка (109) текучей среды, содержащая: наружную поверхность (125); по меньшей мере одну поверхность, ограничивающую отверстие (121) форсунки текучей среды, образующее канал текучей среды через наружную поверхность (125); при этом форсунка (109) текучей среды содержит по меньшей мере одну ножку (128) форсунки с поверхностью (117) ножки, выступающей из ножки (128) форсунки; при этом поверхность (117) ножки вблизи конусовидной поверхности форсунки (119) текучей среды расположена по одной линии с отверстием (121) форсунки; и при этом форсунка (109) текучей среды выполнена с возможностью отклонения и высвобождения форсунки (109) текучей среды из вмещающего компонента (97), когда усилие, направленное через отверстие (121) форсунки текучей среды, увлекает конусовидную поверхность форсунки (119) текучей среды.
[0225] Узел уплотнения вала. Узел уплотнения может отличаться тем, что он включает в себя податливое уплотнение вала. Узел уплотнения может отличаться тем, что податливое уплотнение вала не входит в соприкосновение с валом во время нормальной работы.
[0226] Способ эксплуатации податливого уплотнения вала, при котором: осуществляют впрыск текучей среды более высокого давления у одной стороны податливого уплотнения во время работы, при этом рабочая текучая среда воздействует на противоположную сторону податливого уплотнения во время останова. Способ эксплуатации податливого уплотнения вала, отличающийся тем, что уплотнение вала не входит в соприкосновение с валом во время нормальной работы. Способ эксплуатации податливого уплотнения вала, отличающийся тем, что узел уплотнения действует как барьер для рабочей текучей среды во время работы и останова. Способ эксплуатации податливого уплотнения вала, отличающийся тем, что скорость относительного перемещения поверхности податливого уплотнения, входящей в соприкосновение во время работы, может быть выше 40 метров в секунду.
[0227] Способ уменьшения запаздывания кручения ротационной машины объемного вытеснения с пошаговым перемещением, при котором применяют элемент гидростатического подшипника в комбинации с поверхностью шестерни.
[0228] Способ эксплуатации компрессора с усеченно-сферической внутренней поверхностью корпуса и роторами в комбинации с усеченно-сферической внутренней поверхностью, образующими камеру сжатия, включающий в себя этапы, на которых: осуществляют перемещение рабочей текучей среды в камеру сжатия с возможностью достижение отношения давлений по меньшей мере 1:1 за единственную ступень; при этом температуре на выходе газа, вытесняемого через выпускной канал, ниже 150 градусов Цельсия; причем аксиальные и радиальные нагрузки/смещение, возникающие в качестве реакции на сжатие газа роторами, нейтрализуют посредством гидростатических подшипников; причем аксиальное и радиальное отклонения, возникающие в качестве реакции на тепловое расширение и центробежное нагружение, в соответствующих случаях, нейтрализуют посредством гидростатического подшипника. Способ эксплуатации компрессора, дополнительно содержащий этап, на котором осуществляют впрыск охлаждающей жидкости в камеру сжатия во время указанного сжатия. Способ эксплуатации компрессора, отличающийся тем, что впрыск охлаждающей текучей среды осуществляют посредством форсунок, установленных на подвижном компоненте. Способ эксплуатации компрессора, отличающийся тем, что абсолютное давление на выпуске рабочей текучей среды, вытесняемой из камеры сжатия через выпускной канал, превышает абсолютное давление на впуске рабочей текучей среды у впускного канала в соотношение от 1:1 до 370:1. Способ снижения трения в самокомпенсирующемся ротационном гидростатическом подшипнике, увеличения его несущей способности и уменьшения утечки из него, включающий в себя этапы, на которых: создают центральное отверстие, примыкающие по существу круговые площадки, примыкающие канавки ограничителя и примыкающие по существу кольцевые площадки в пределах кармана подшипника, благодаря чему по существу кольцевые канавки связаны по текучей среде с карманом подшипника на диаметрально противоположной стороне ротационного гидростатического подшипника.
[0229] Способ снижения трения в самокомпенсирующемся ротационном гидростатическом подшипнике, увеличения его несущей способности и уменьшения утечки из него, включающий в себя этапы, на которых: создают питающий канал, примыкающие по существу круговые площадки, примыкающие по существу кольцевые канавки и примыкающие по существу кольцевые площадки в пределах кармана подшипника, благодаря чему по существу кольцевые канавки связаны по текучей среде с карманом подшипника на диаметрально противоположной стороне ротационного гидростатического подшипника.
[0230] Ротационная машина, раскрытая в настоящем описании, дополнительно содержащая: скользящие заслонки (170) на наружных усеченно-сферических поверхностях роторов, при этом скользящие заслонки выборочно ограничивают поток текучей среды между каналами (112) корпуса и камерой (144), образованной между впадиной первого ротора и впадиной второго ротора. Ротационная машина может дополнительно содержать обод (26) между вторым ротором и указанными скользящими заслонками.
[0231] Способ динамического регулирования повышения давления и степени расширения ротационной машиной, включающий в себя следующие этапы. В режиме сжатия: выборочно регулируют открытие выпускного канала; регулируют температуру рабочей текучей среды на выпуске для приведения ее к 150 градусам Цельсия или регулируют рабочую текучую среду путем выборочного регулирования объема охлаждающей жидкости, впрыскиваемой в машину; контролируют температуру рабочей текучей среды на выпуске и объем охлаждающей жидкости, впрыскиваемой в машину; передают измеренные значения температуры на выпуске и измеренные значения объема охлаждающей жидкости электронному устройству управления. В режиме расширения (когда установку эксплуатируют в обратном направлении): выборочно регулируют открытие канала, служащего для выпуска в режиме сжатия; регулируют температуру на выпуске из канала, служащего для впуска в режиме сжатия, для приведения ее к +10 градусам Цельсия или выше путем регулирования объема нагревающей жидкости, впрыскиваемой в машину. Контролируют температуру рабочей текучей среды на выпуске и объем нагревающей жидкости, впрыскиваемой в машину. Передают измеренное значение температуры рабочей текучей среды на выпуске и измеренные значения объема нагревающей жидкости электронному устройству управления.
[0232] Способ обеспечения возможности эксплуатации ротационной машины как в качестве детандера, так и в качестве компрессора, в одной и той же машине, состоящий в том, что: создают машину усеченной формы с линией уплотнения, обеспечивающей возможность повышения давления в режиме сжатия в одном направлении и возможность расширения в противоположном направлении.
[0233] Несмотря на то что настоящее изобретение было проиллюстрировано путем детального раскрытия нескольких вариантов осуществления, в намерения заявителей не входит каким-либо образом ограничить объем прилагаемой формулы изобретения указанным детальным раскрытием. Специалистам в данной области техники легко придут на ум дополнительные преимущества и модификации без отступления от объема прилагаемой формулы изобретения. Поэтому изобретение, в его более широких аспектах, не ограничивается конкретными деталями, показательным устройством/аппаратом или способами, или иллюстративными примерами, которые были показаны и раскрыты. Учитывая вышесказанное, возможны отступления от указанных деталей без отступления от существа или объема общей идеи заявителей.
| название | год | авторы | номер документа |
|---|---|---|---|
| РОТОРНЫЙ УЗЕЛ (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ЭНЕРГИИ | 2009 |
|
RU2549007C2 |
| Концентрическая ротационная гидромашина | 2014 |
|
RU2669888C2 |
| РОЛИКО-ЛОПАСТНАЯ МАШИНА | 2003 |
|
RU2253735C2 |
| Забойный двигатель с концентрической роторной приводной системой | 2013 |
|
RU2626476C2 |
| ТУРБОМАШИНА С УРАВНИТЕЛЬНЫМ ПОРШНЕМ ПРОТИВ СДВИГА | 2009 |
|
RU2507399C2 |
| ТЕСТОДЕЛИТЕЛЬНАЯ МАШИНА | 1997 |
|
RU2126631C1 |
| ШЕСТЕРЕНЧАТЫЙ НАСОС С ВНЕШНИМ ЗАЦЕПЛЕНИЕМ, ОБЪЕДИНЕННЫЙ С ДВУМЯ НЕЗАВИСИМО ПРИВОДИМЫМИ В ДЕЙСТВИЕ ПЕРВИЧНЫМИ ПРИВОДАМИ | 2015 |
|
RU2683005C2 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА-КОНСТРУКЦИЯ С ФОРМОВАНИЕМ ПОВЕРХ | 2011 |
|
RU2551844C2 |
| РОЛИКОЛОПАСТНАЯ МАШИНА | 2001 |
|
RU2205273C2 |
| ВИНТОВОЙ НАСОС И ЕГО ПРИМЕНЕНИЕ | 2021 |
|
RU2785559C1 |
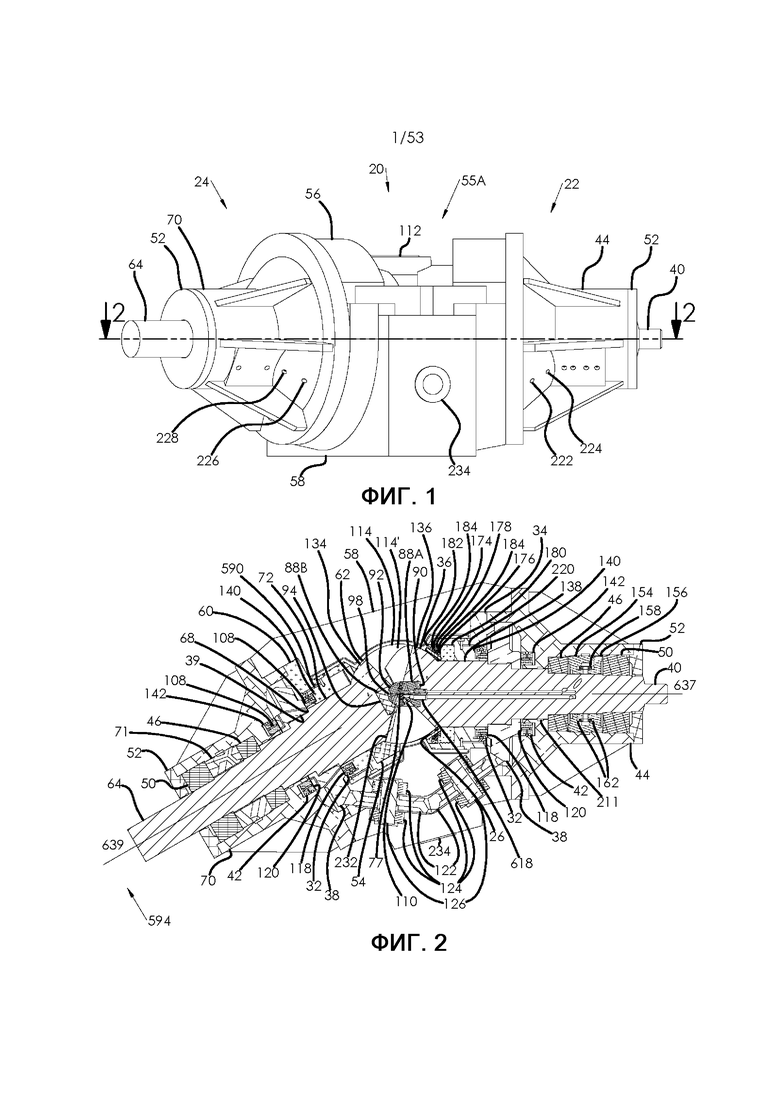
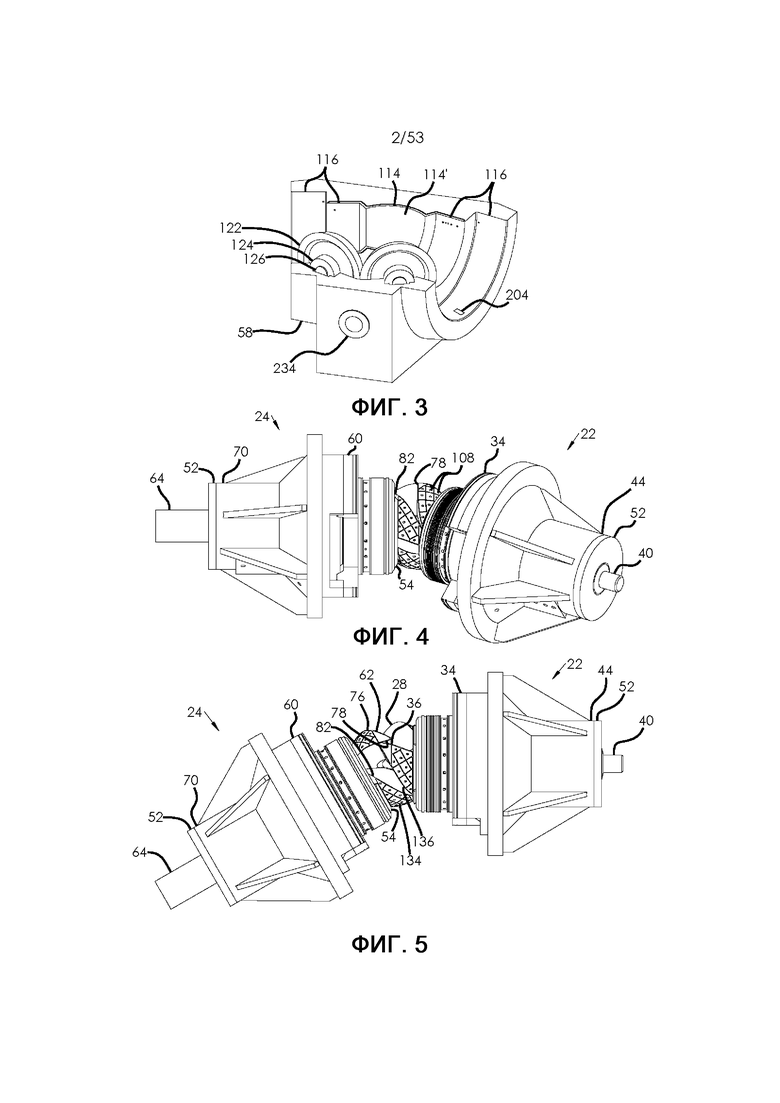
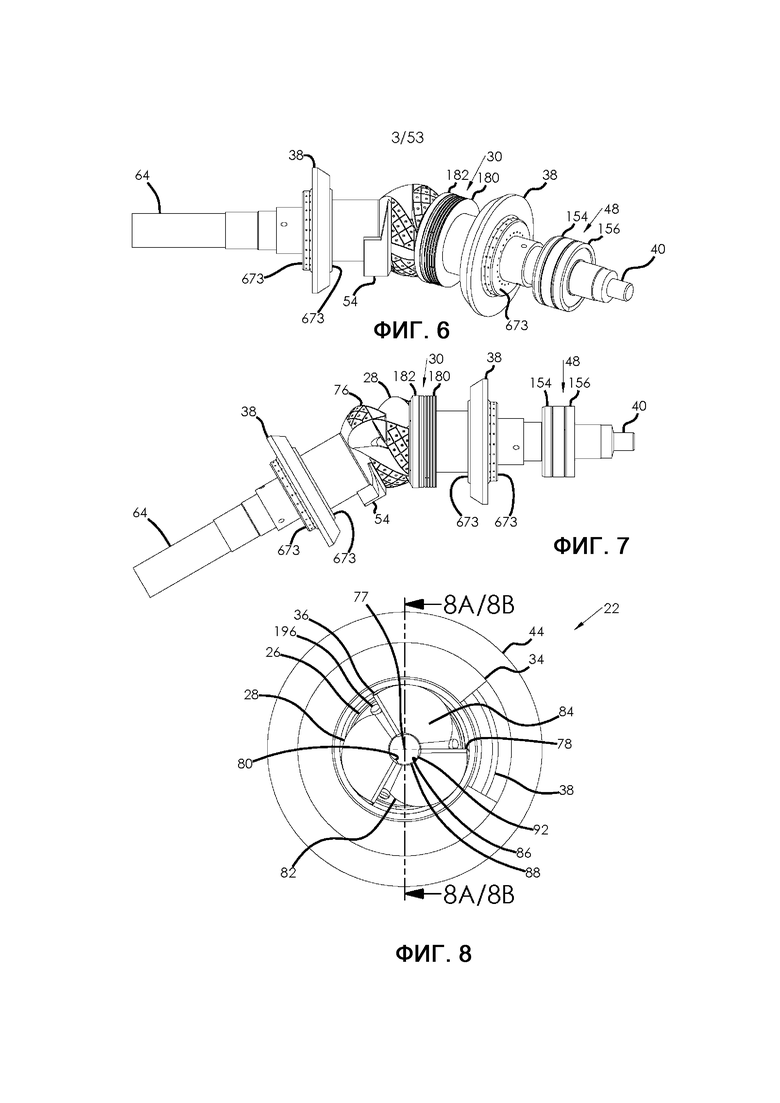
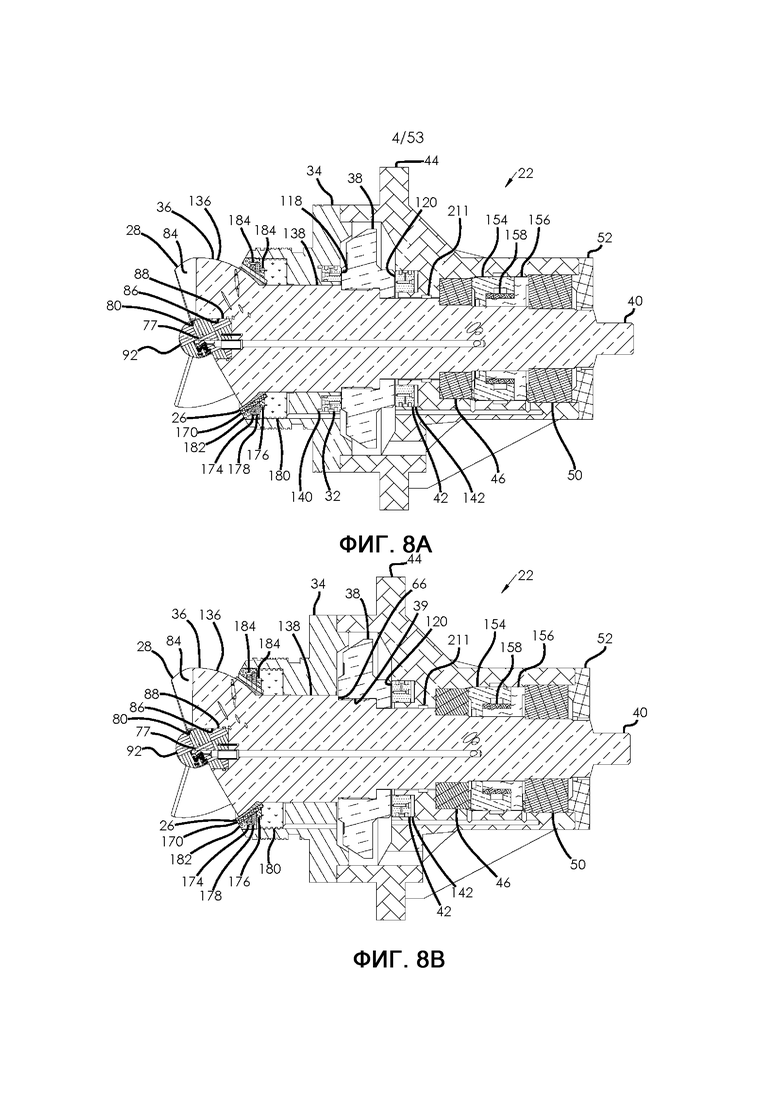
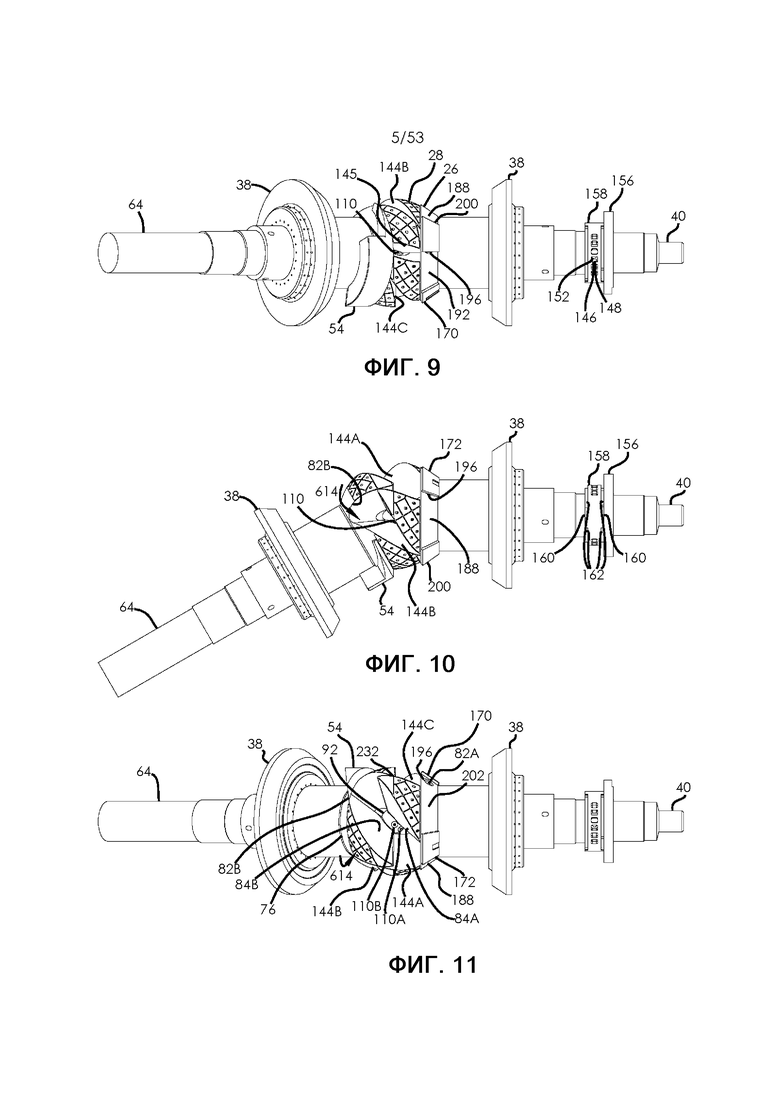
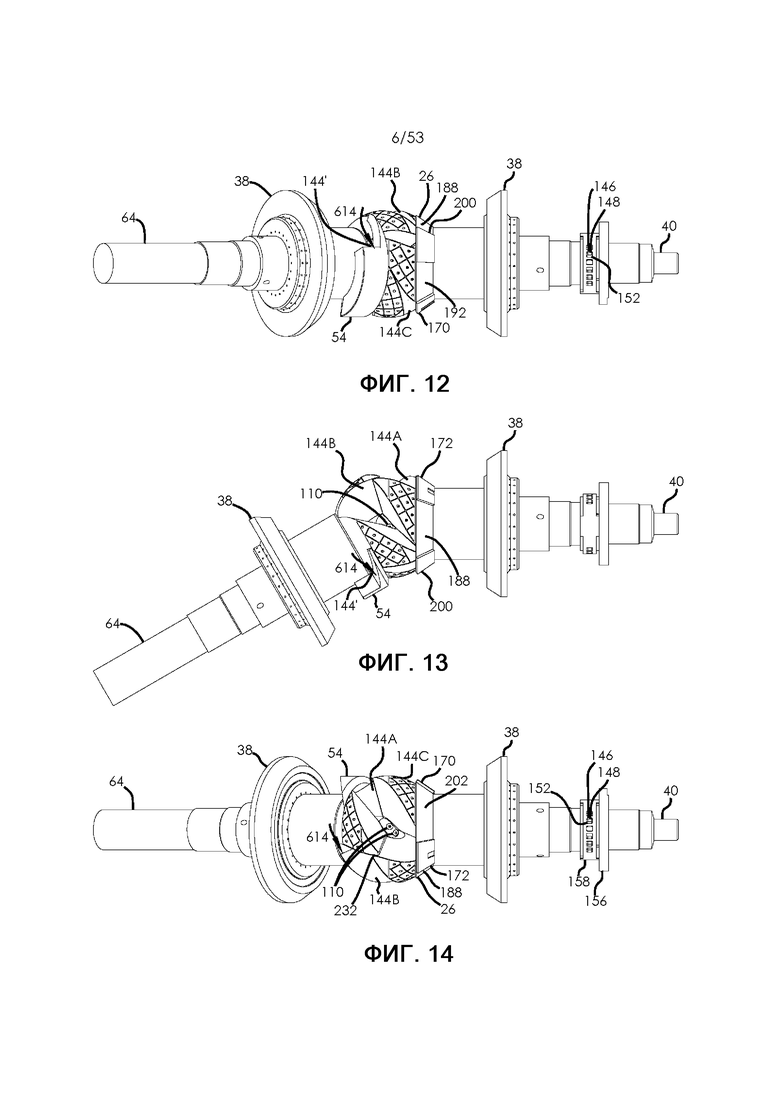
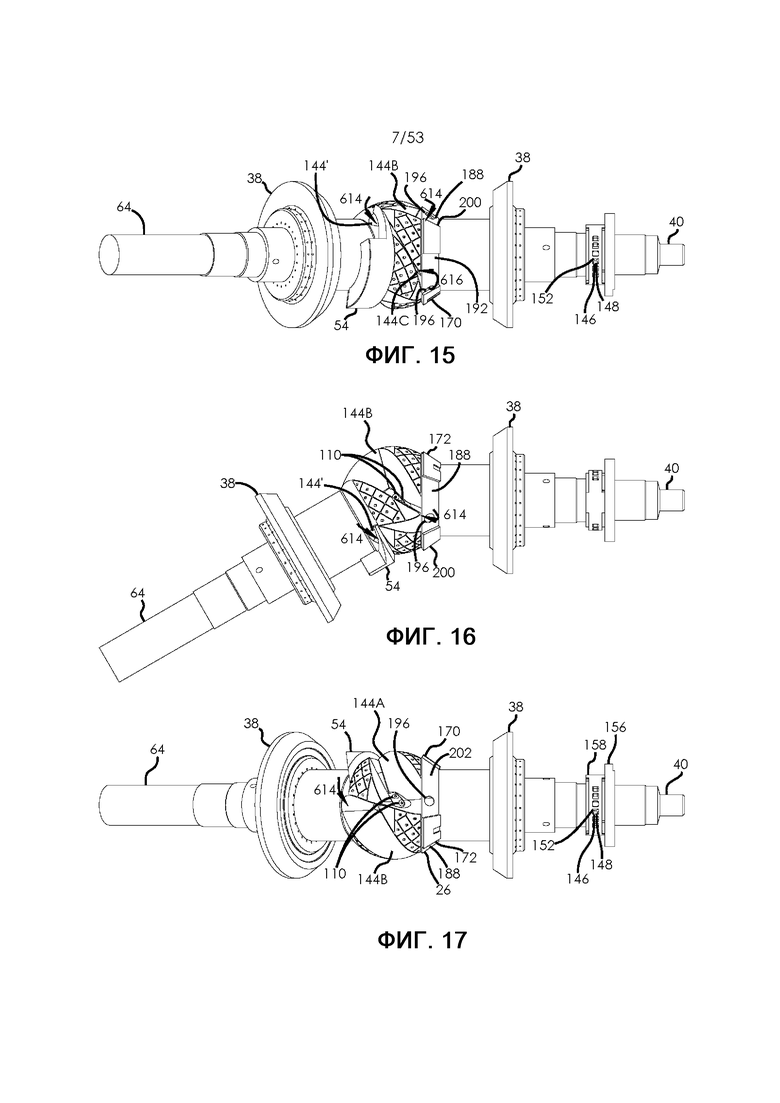
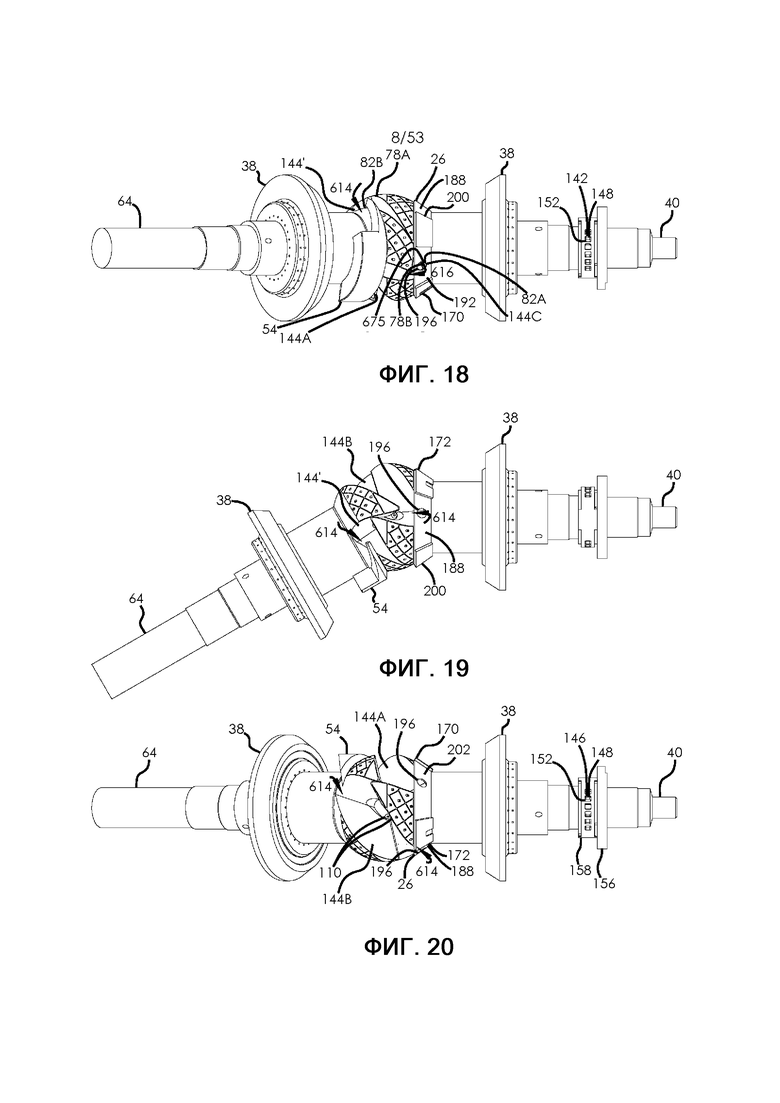
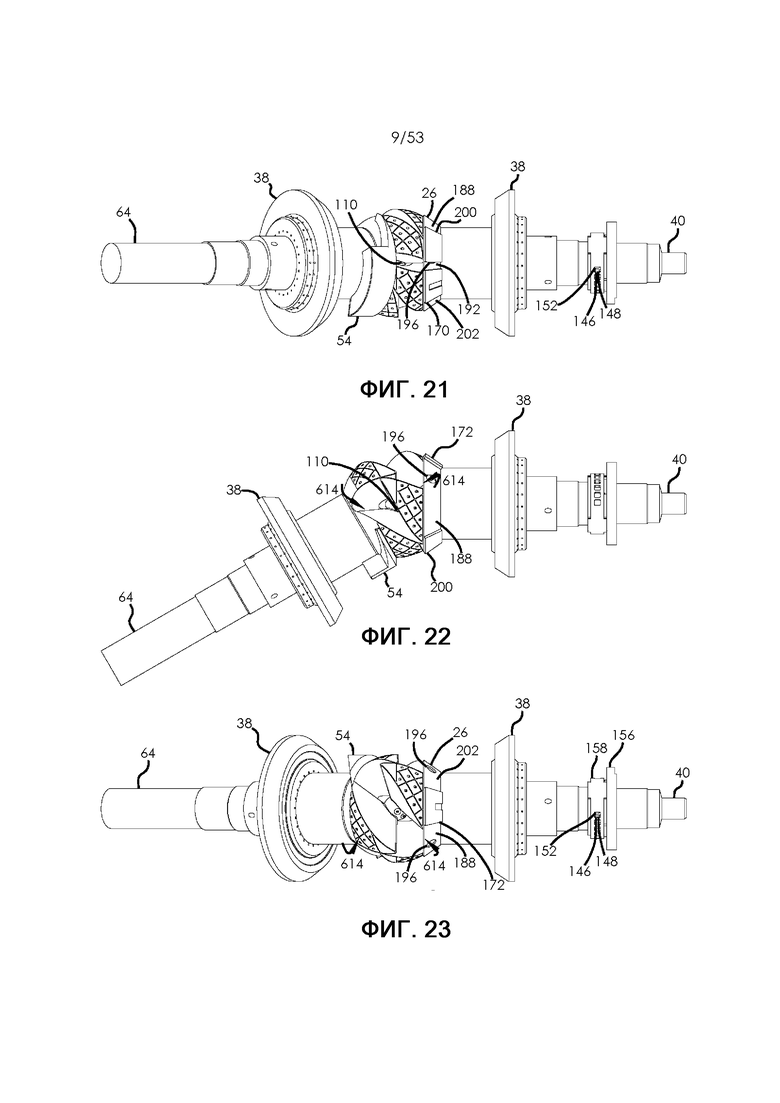
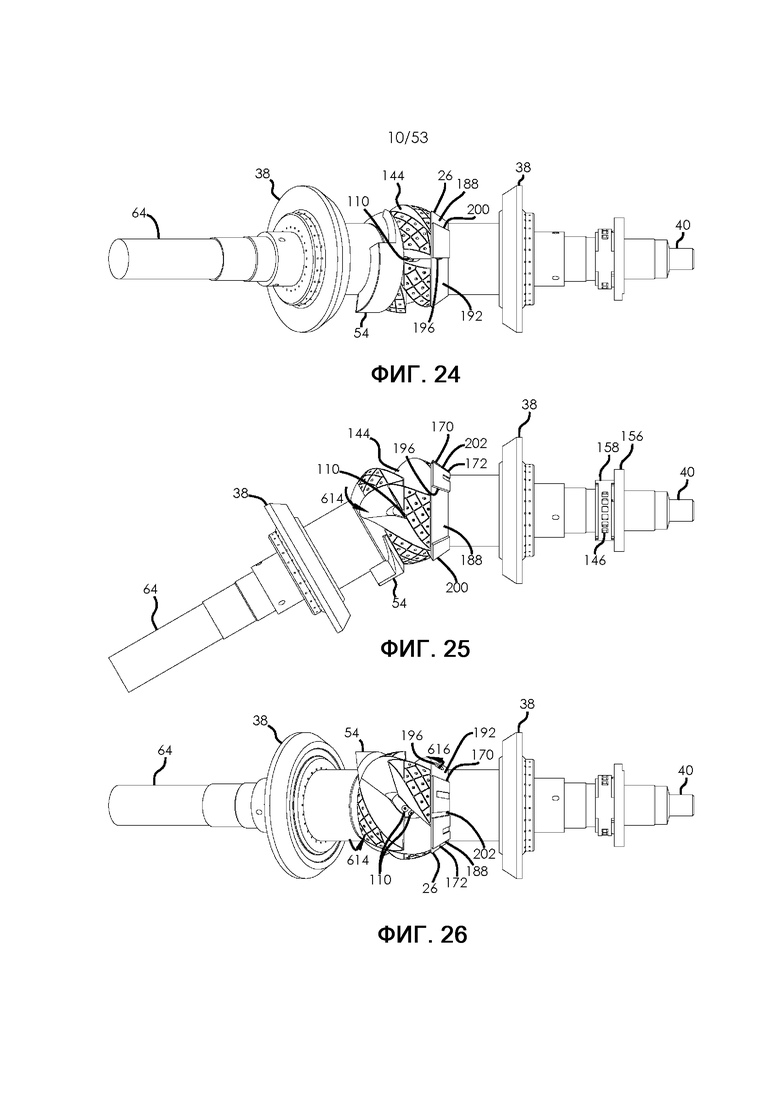
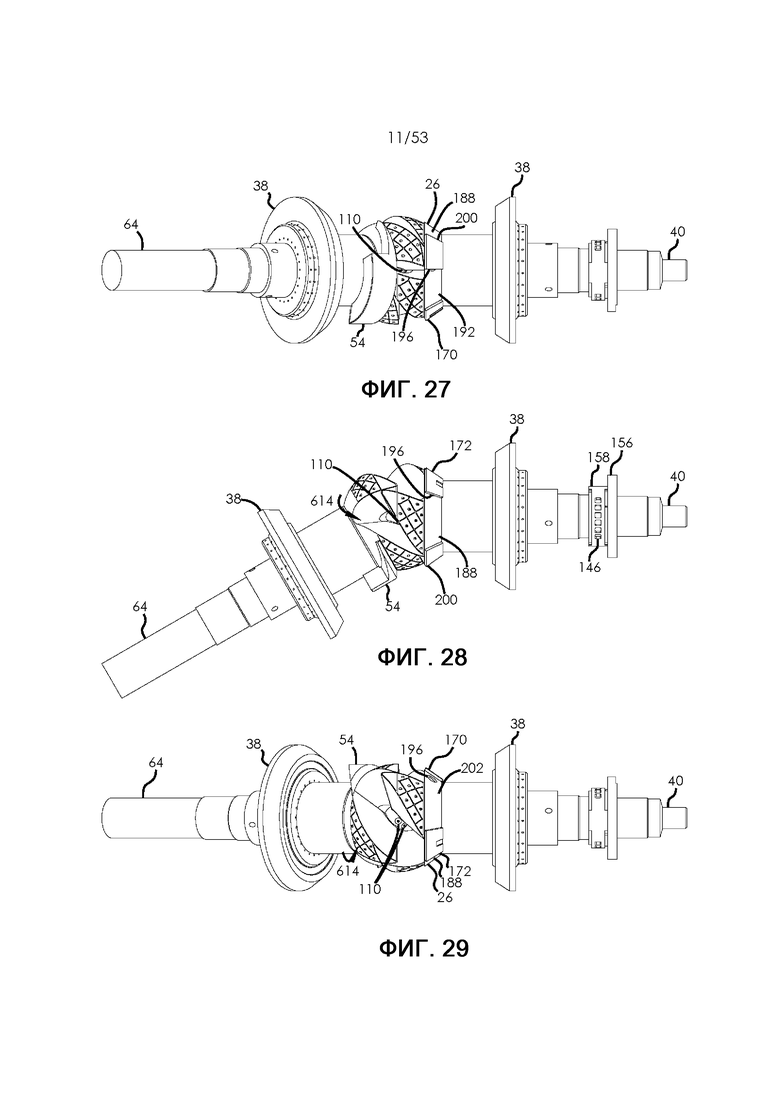
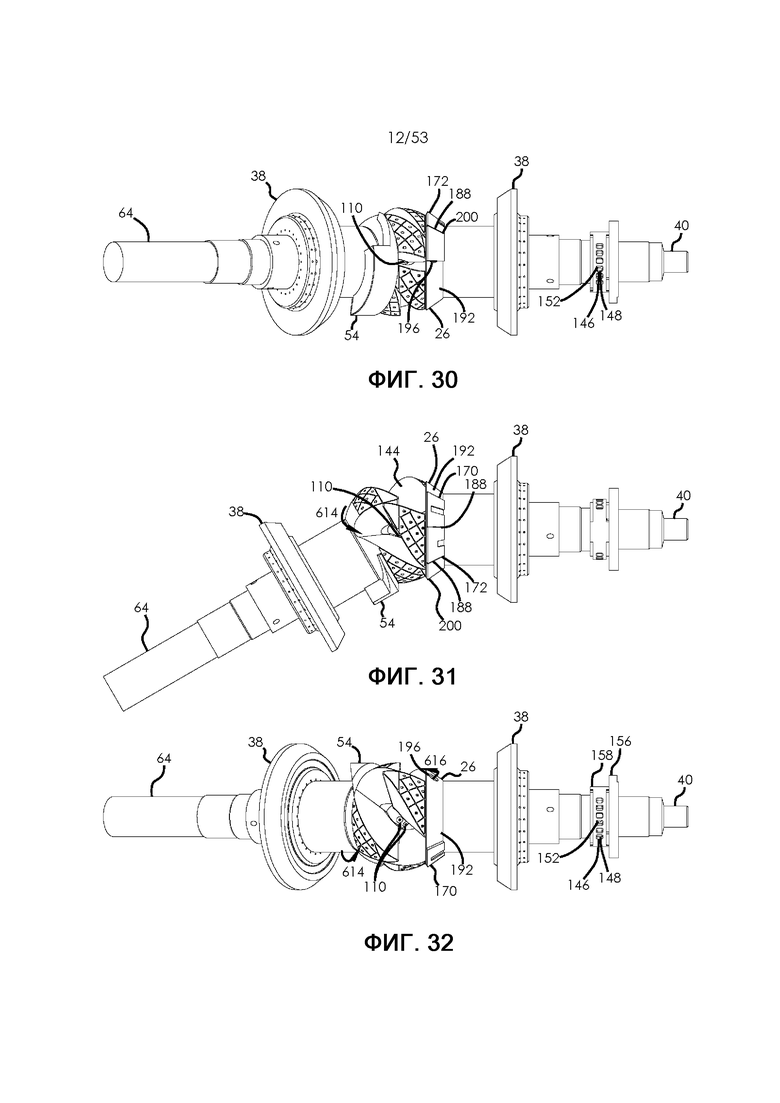
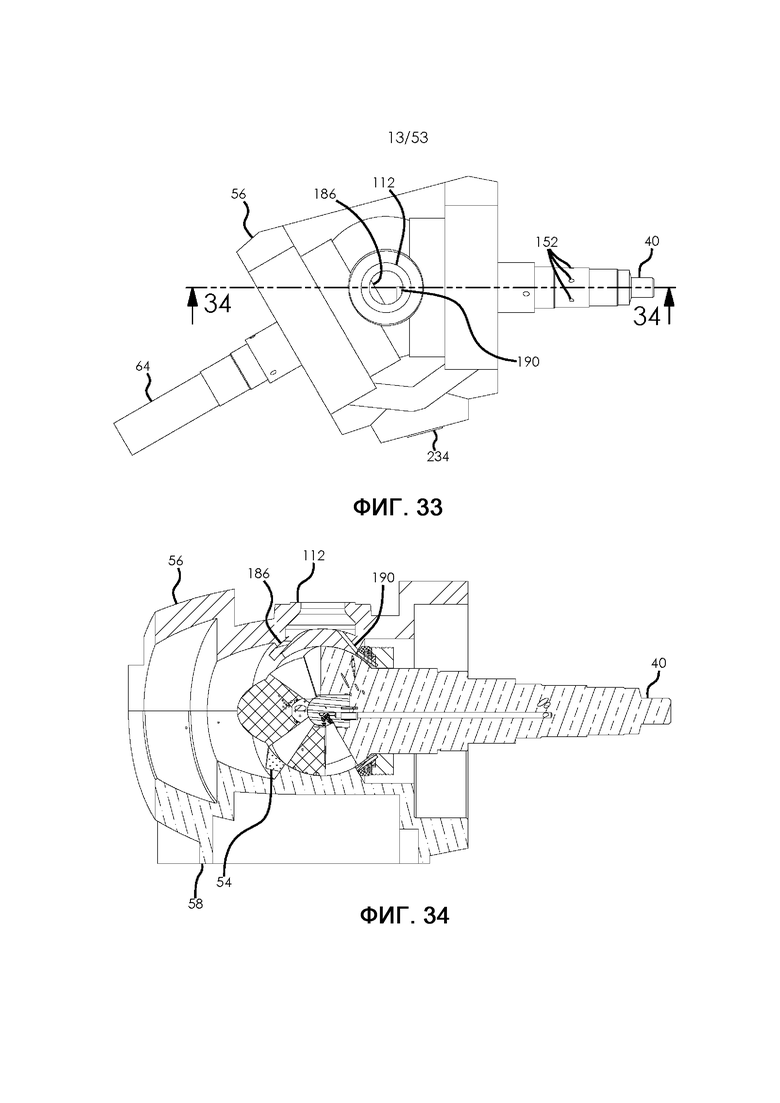
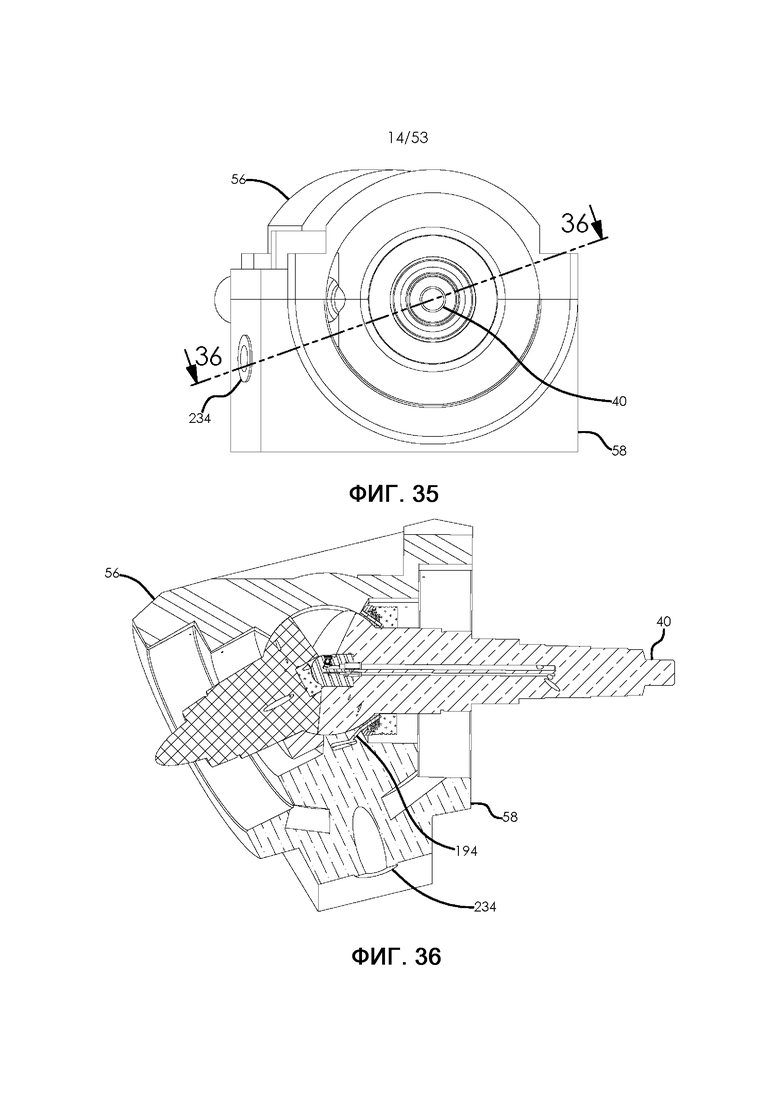
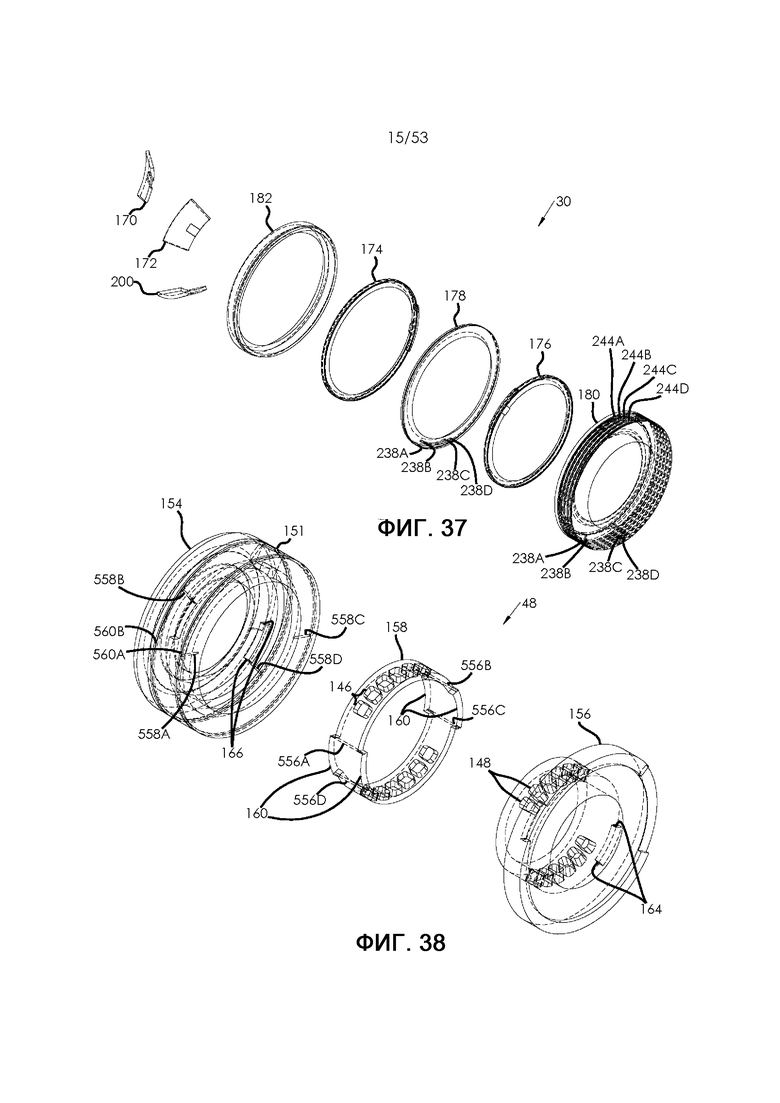
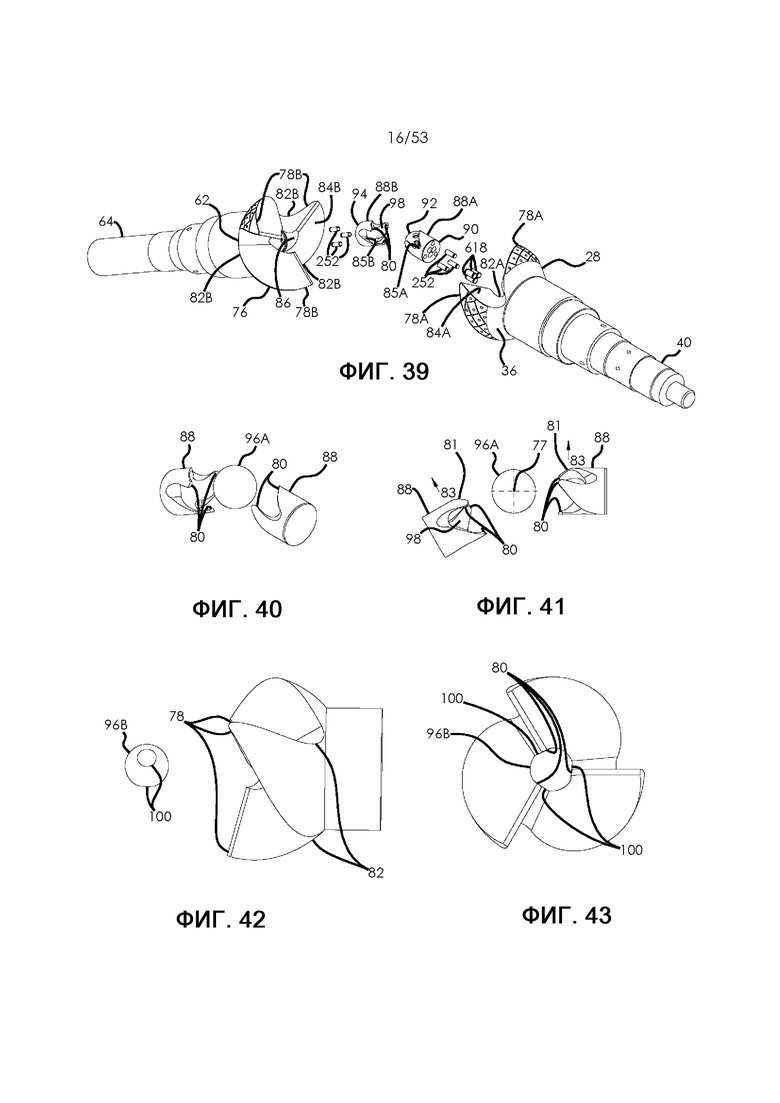
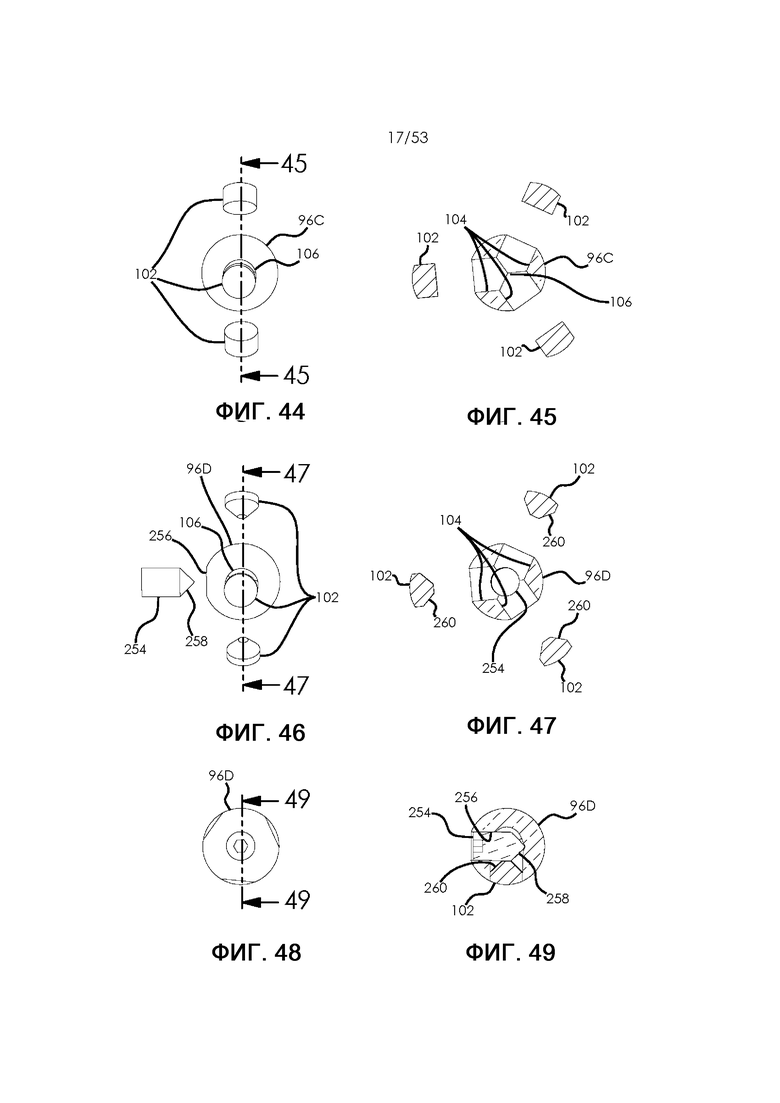
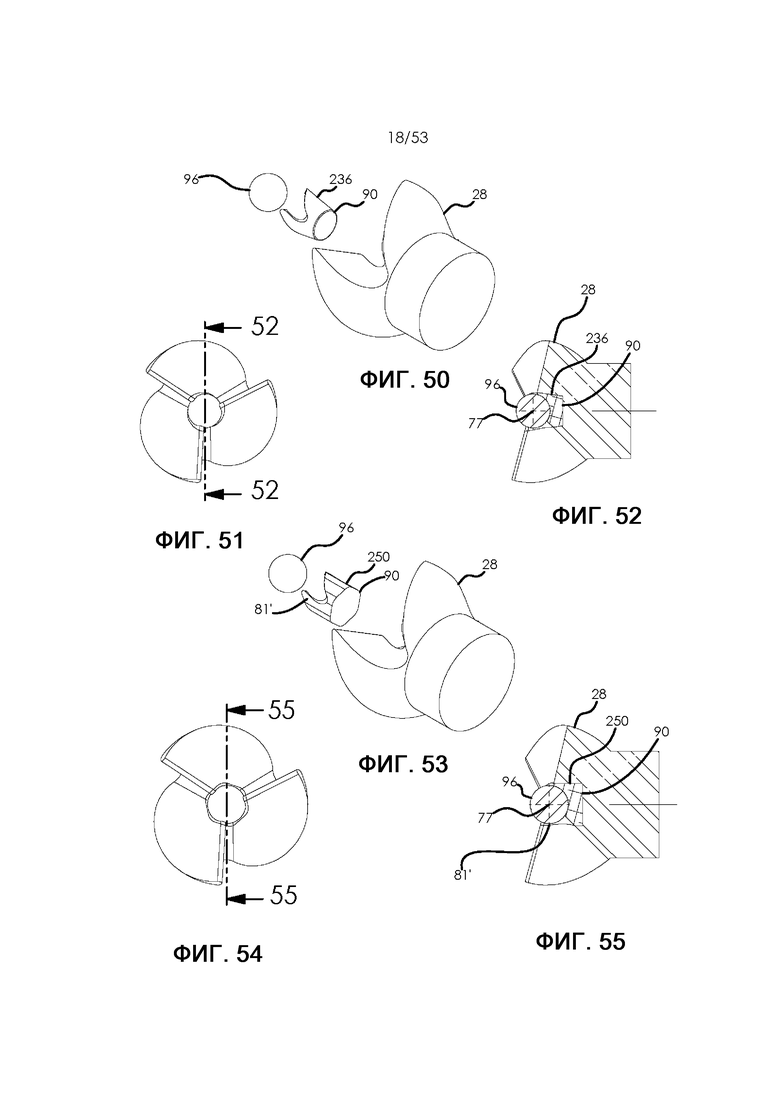
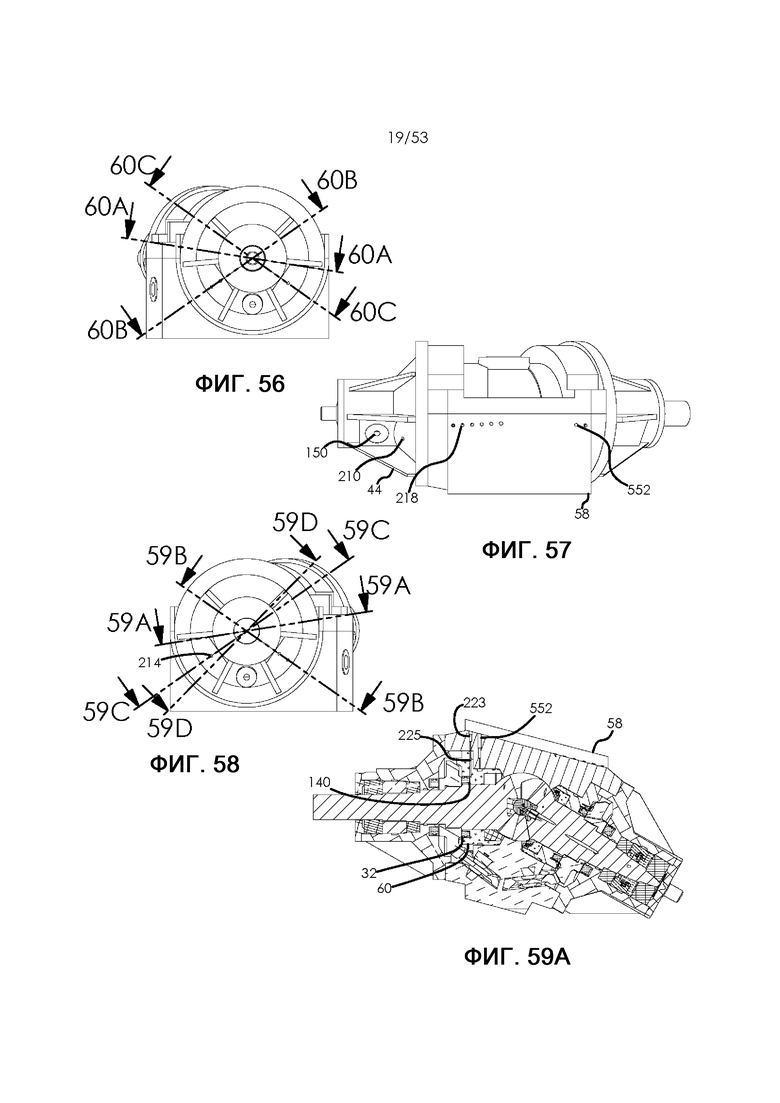
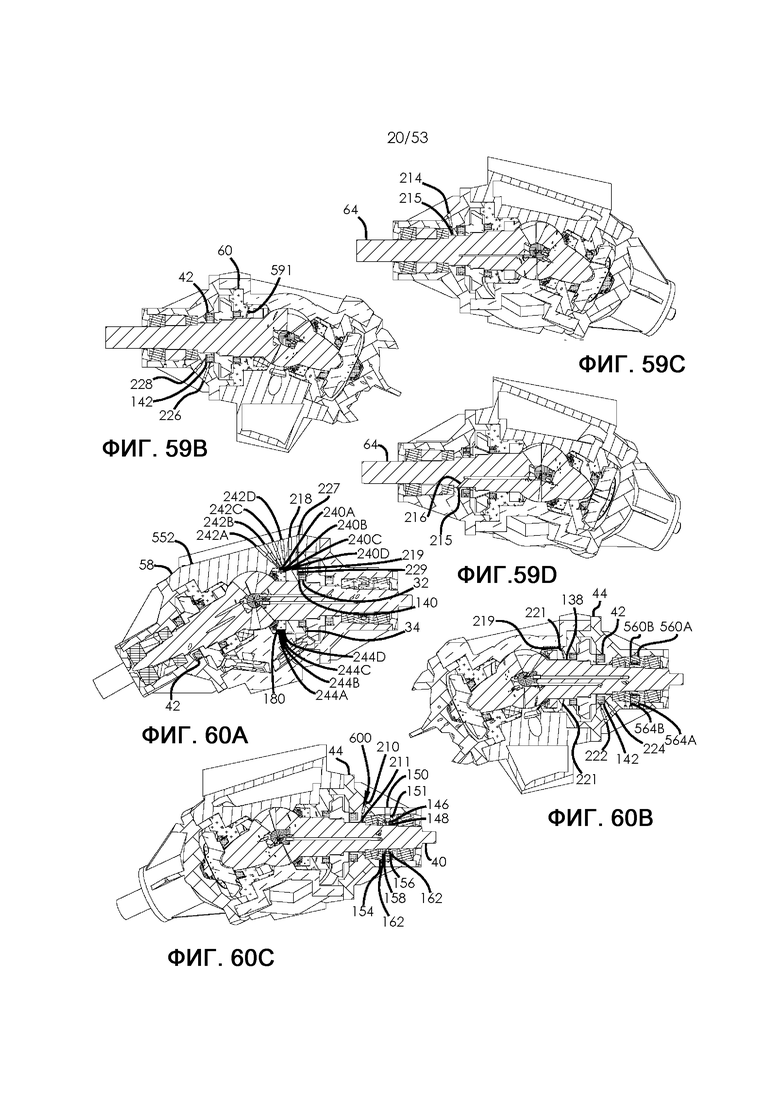
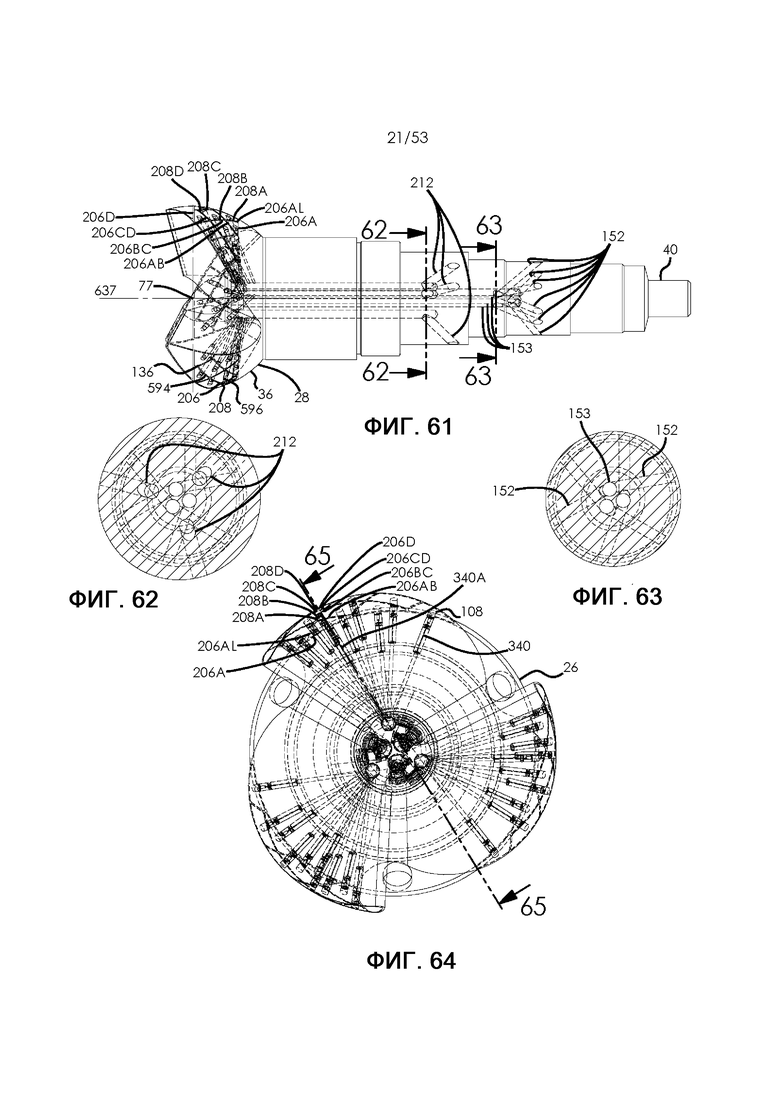
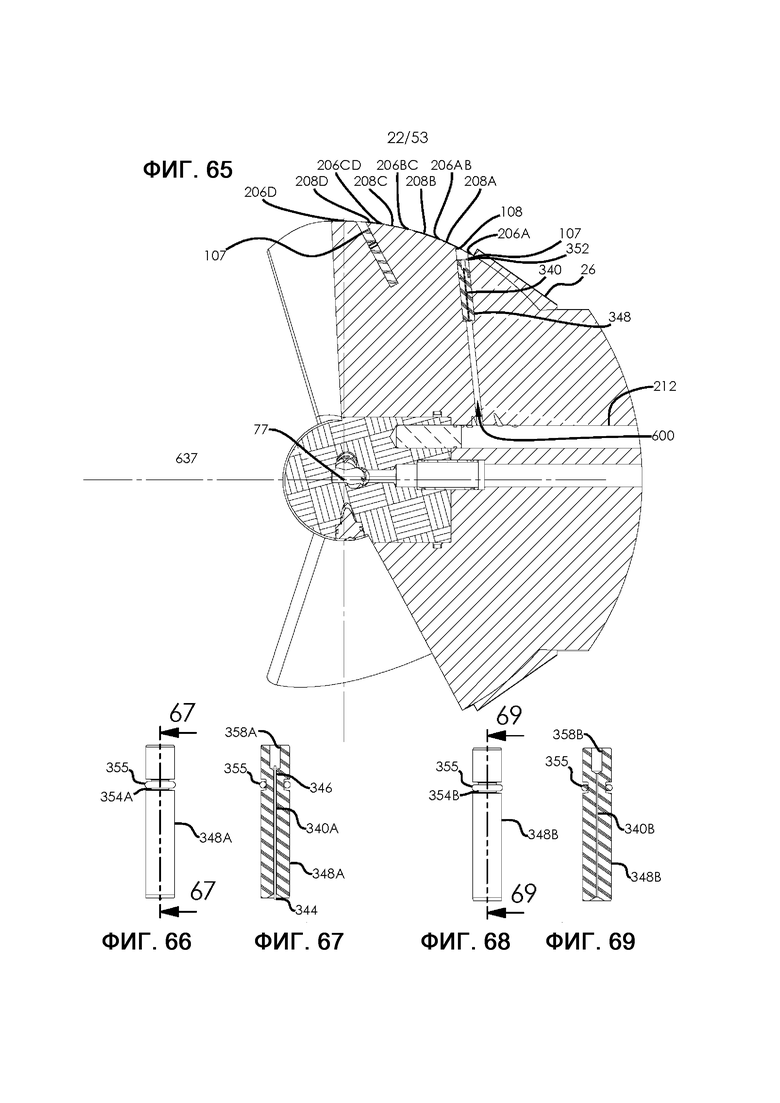
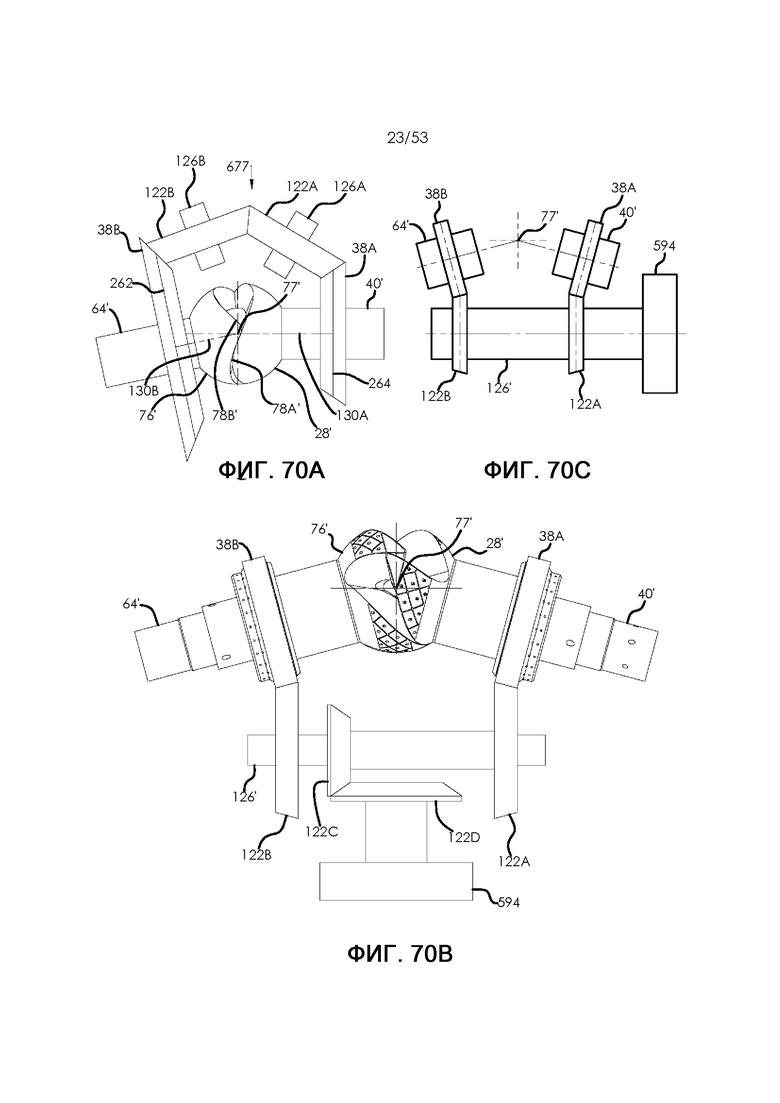
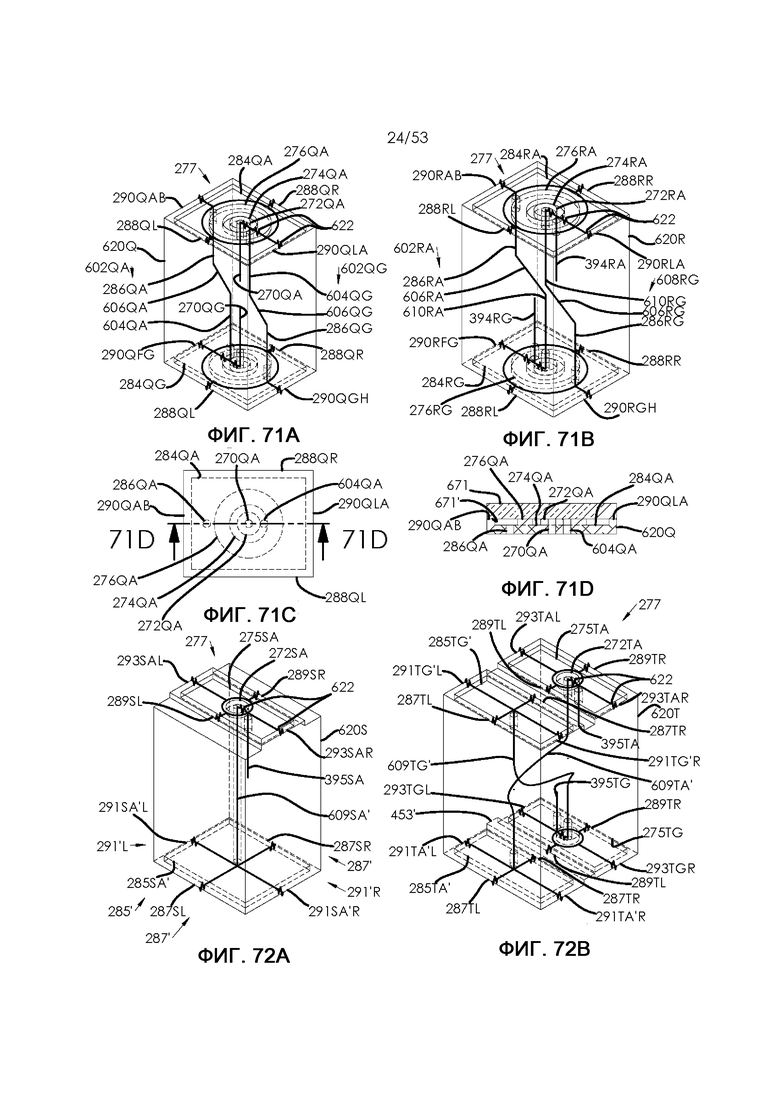
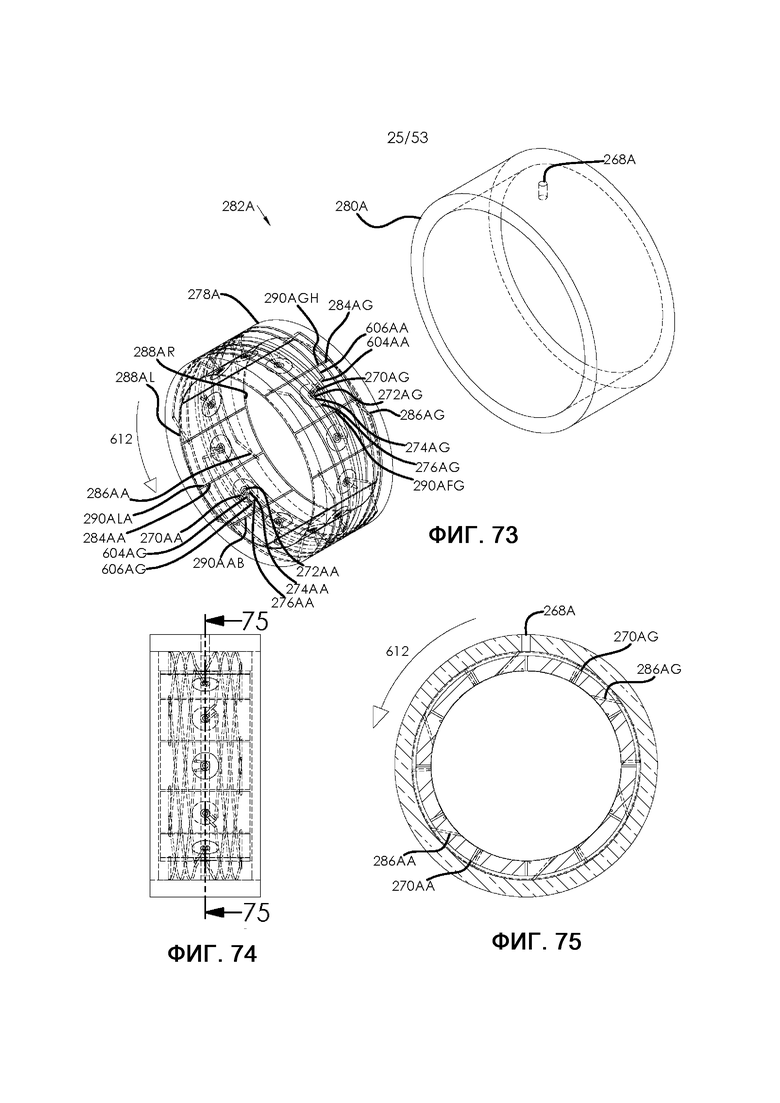
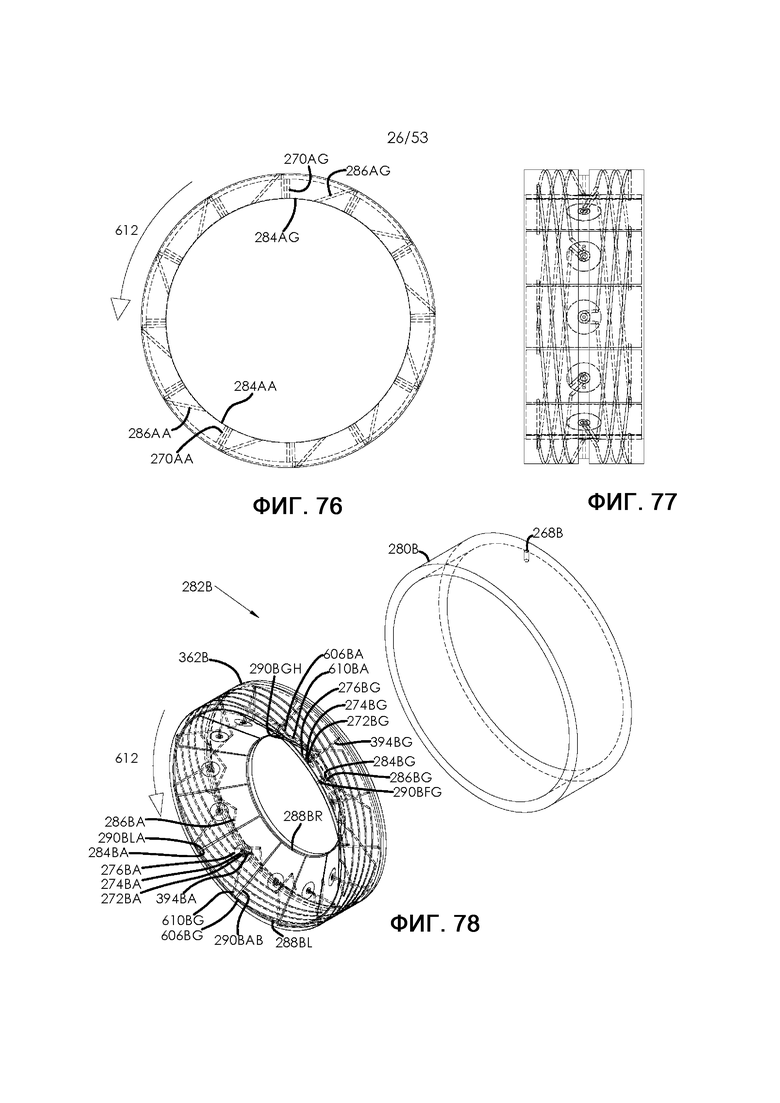
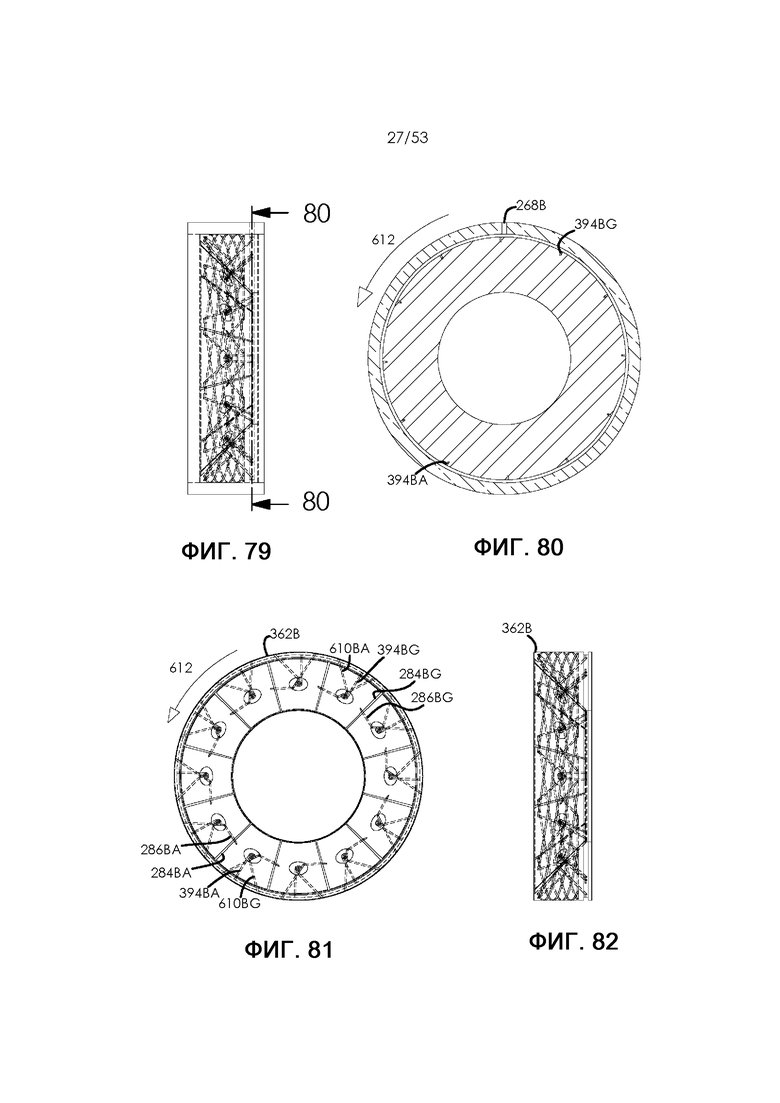
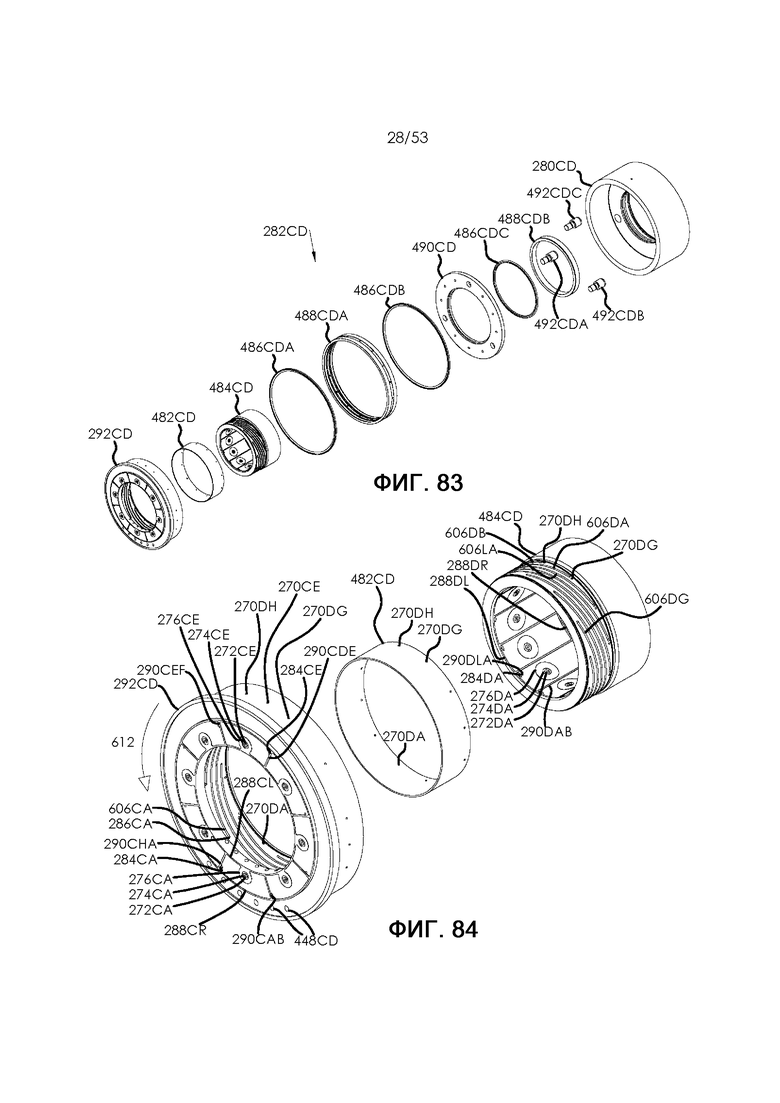
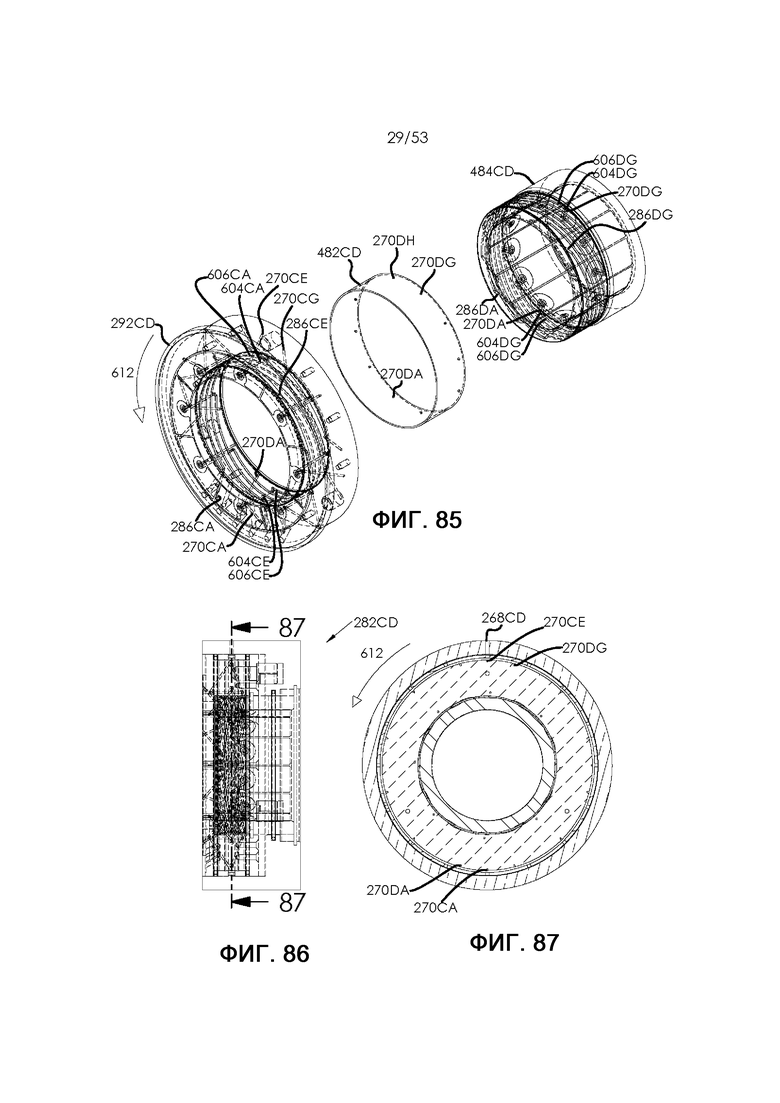
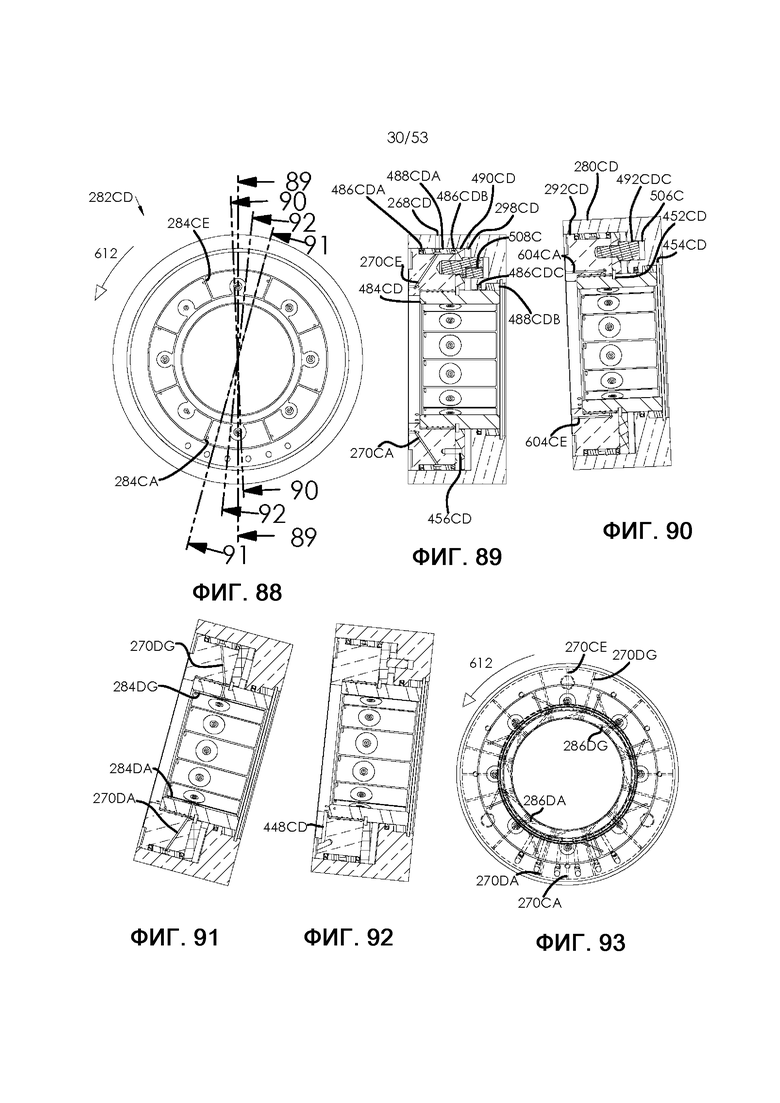
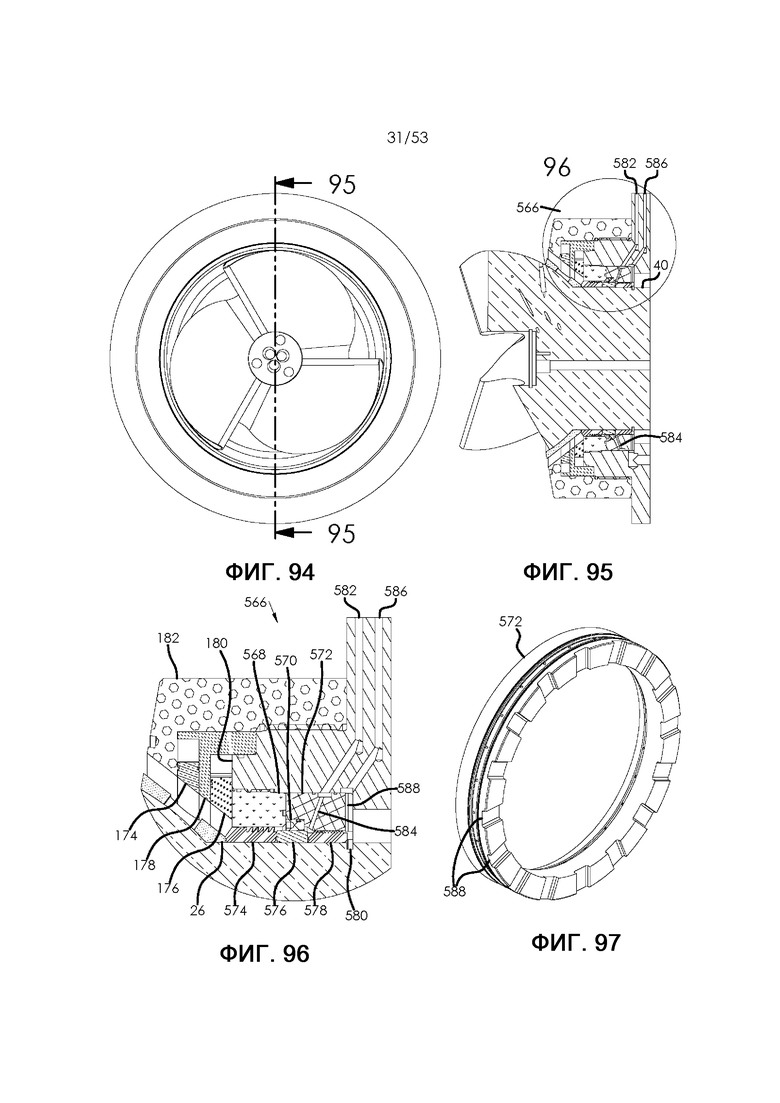
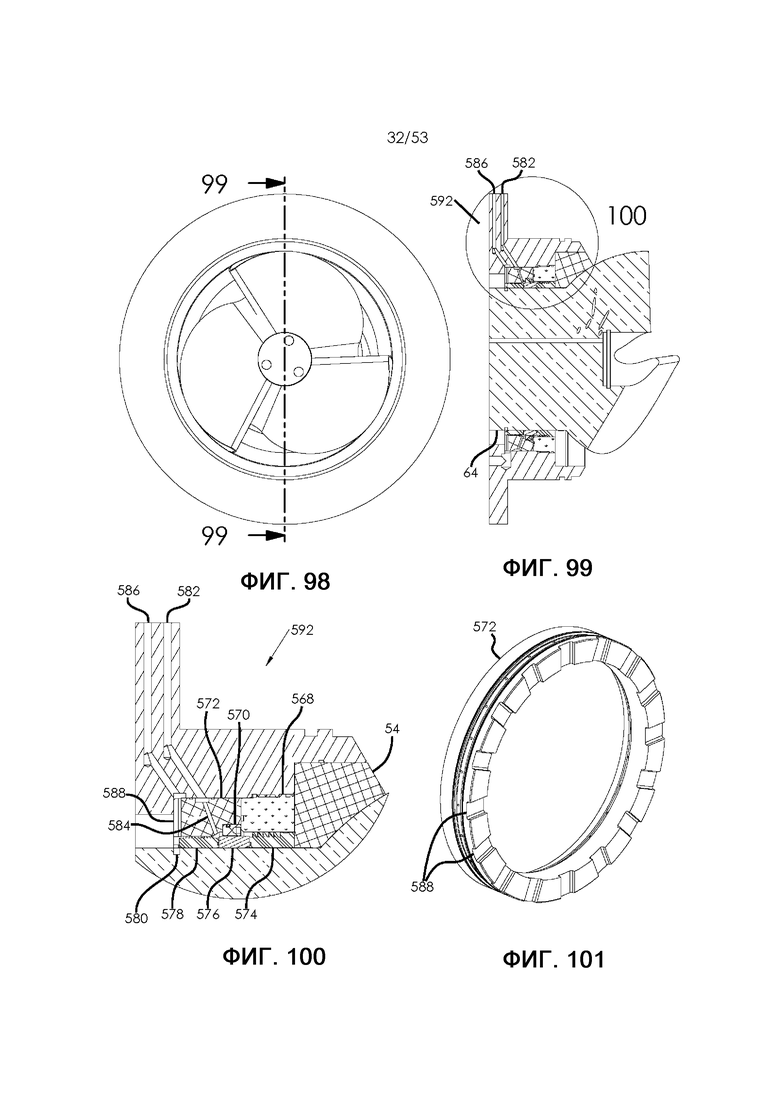
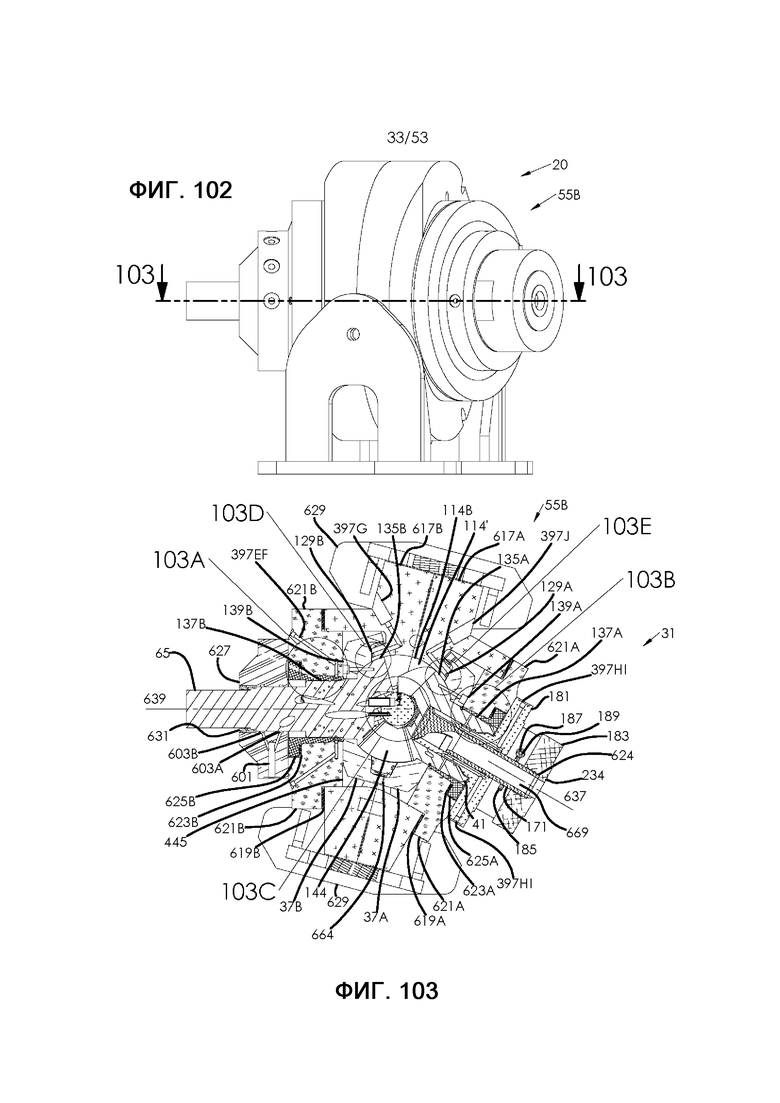
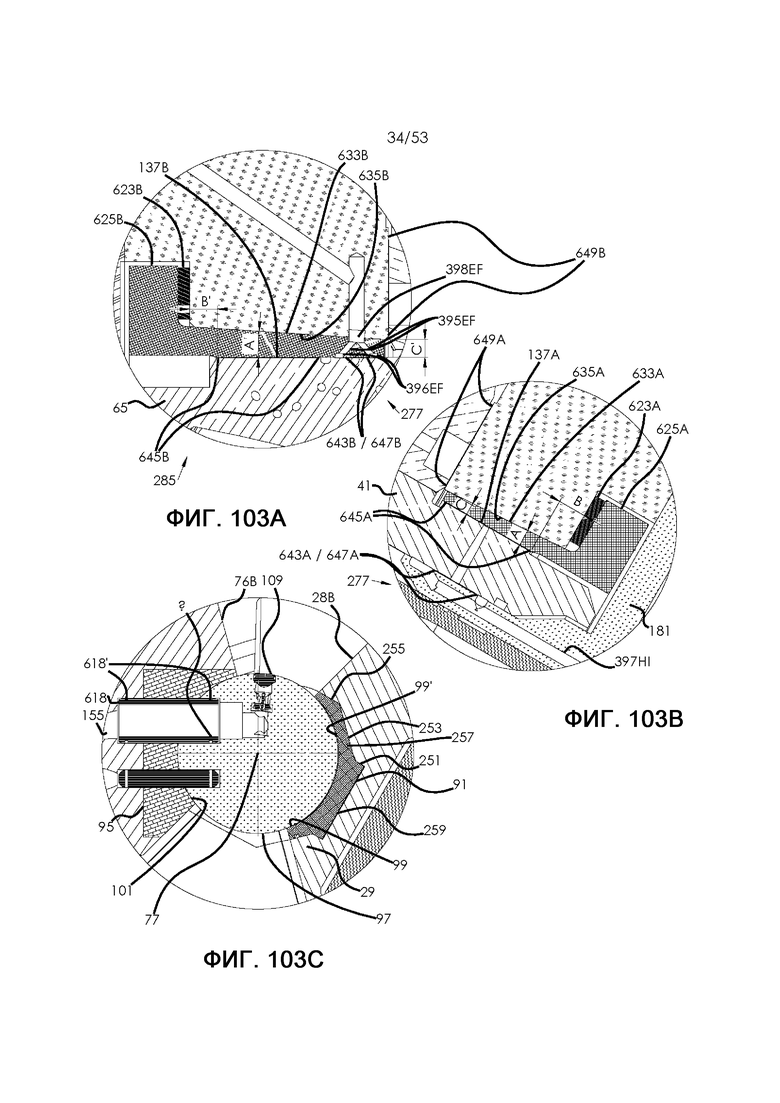
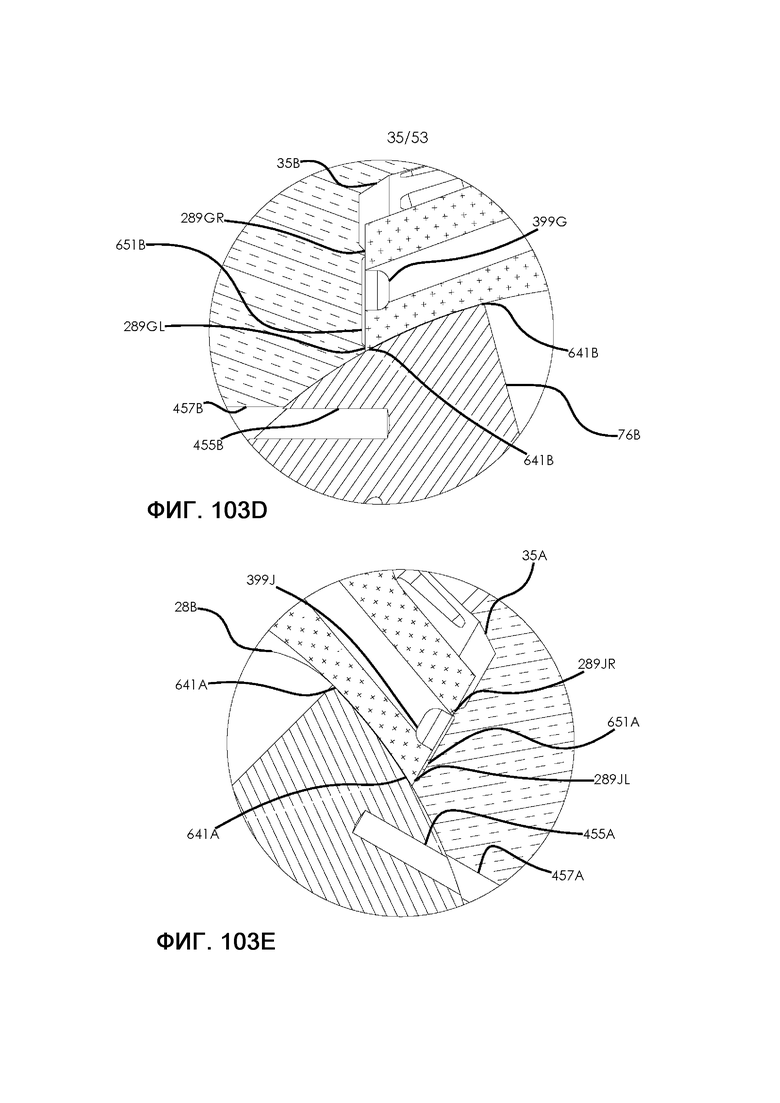
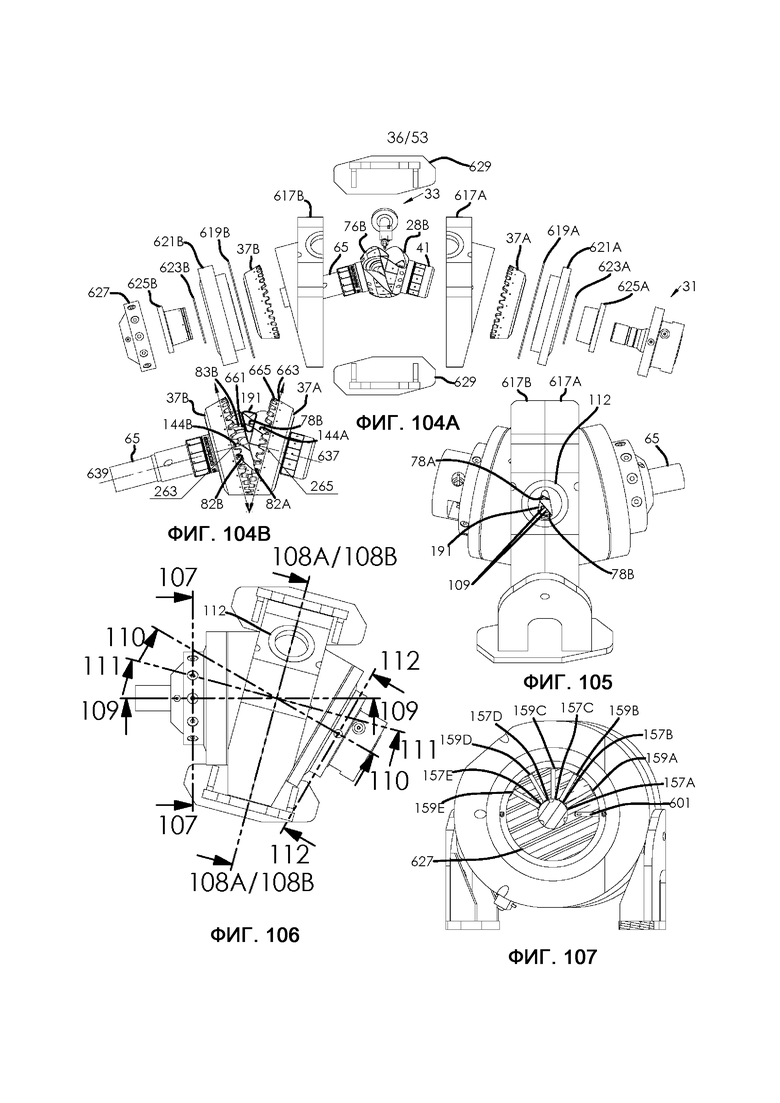
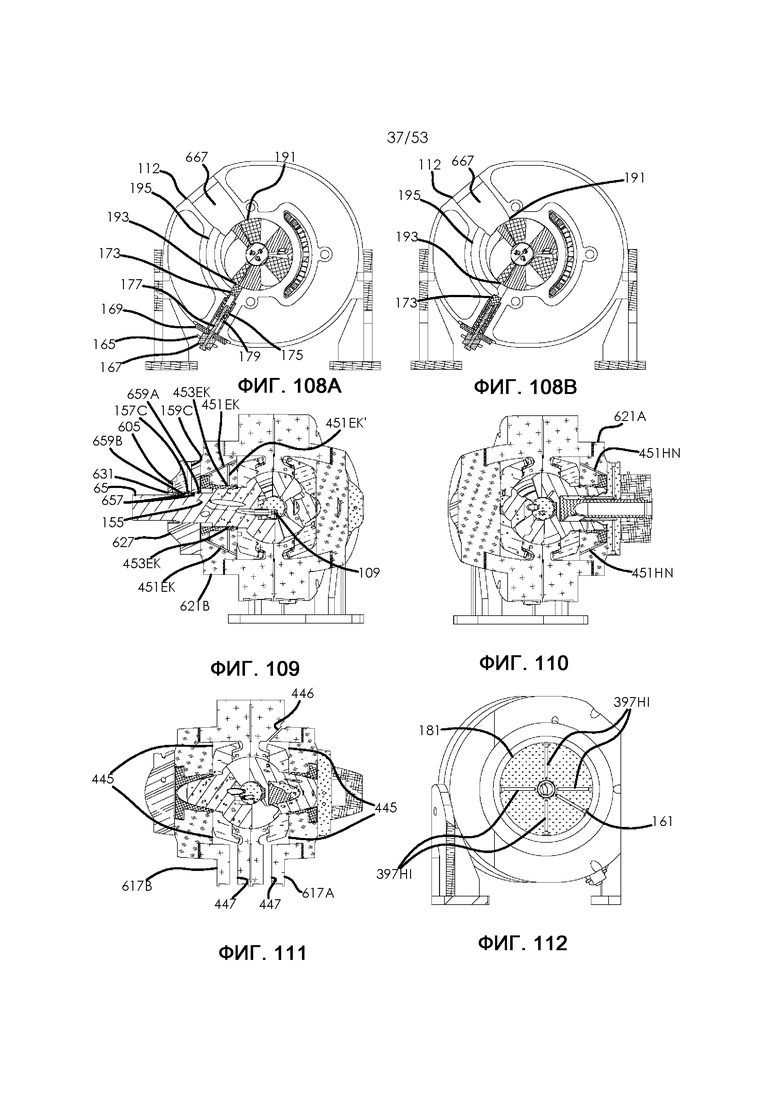
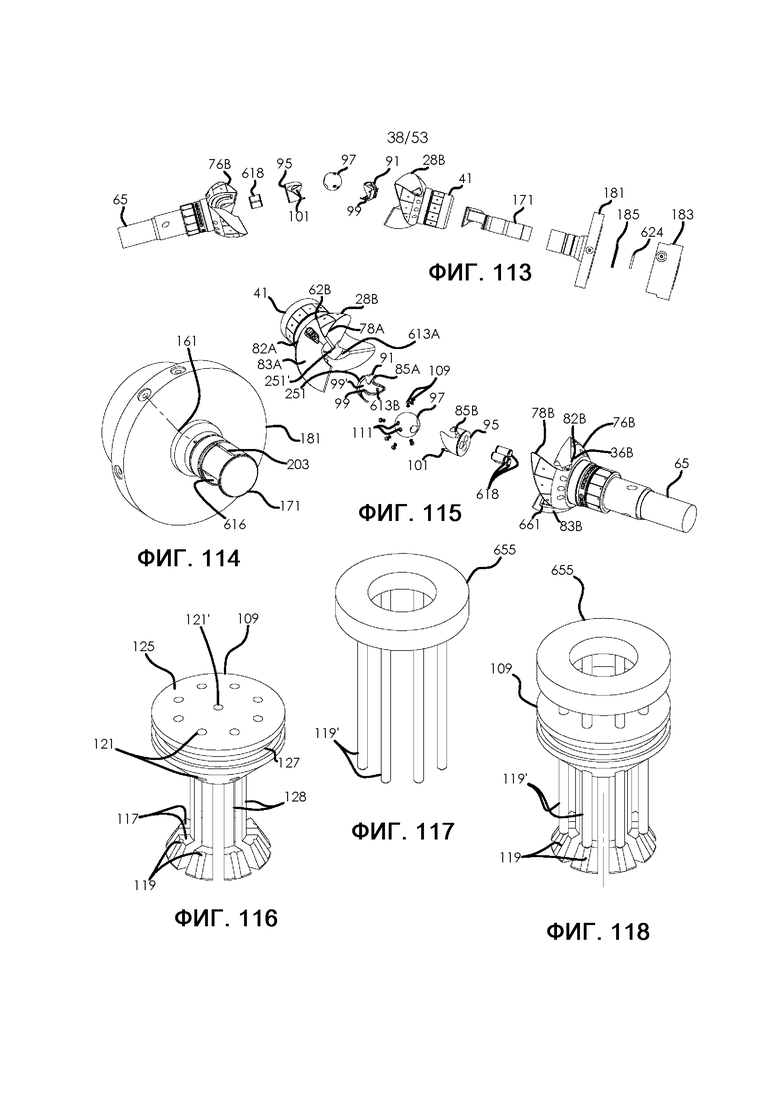
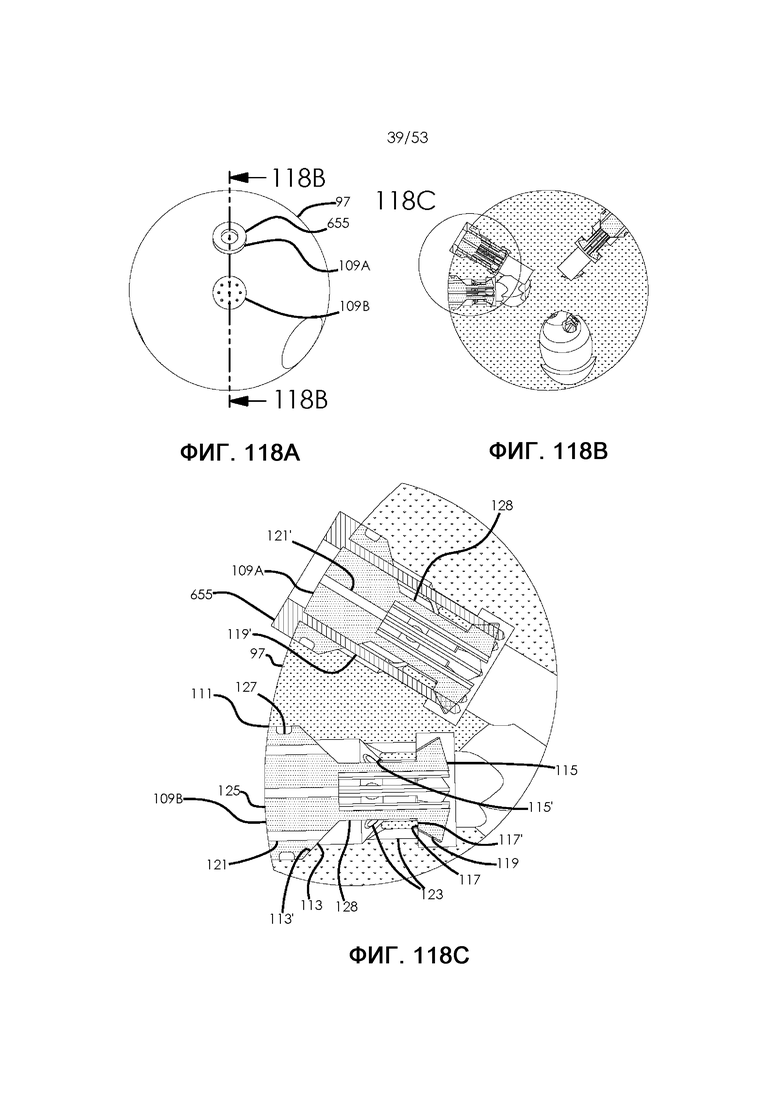
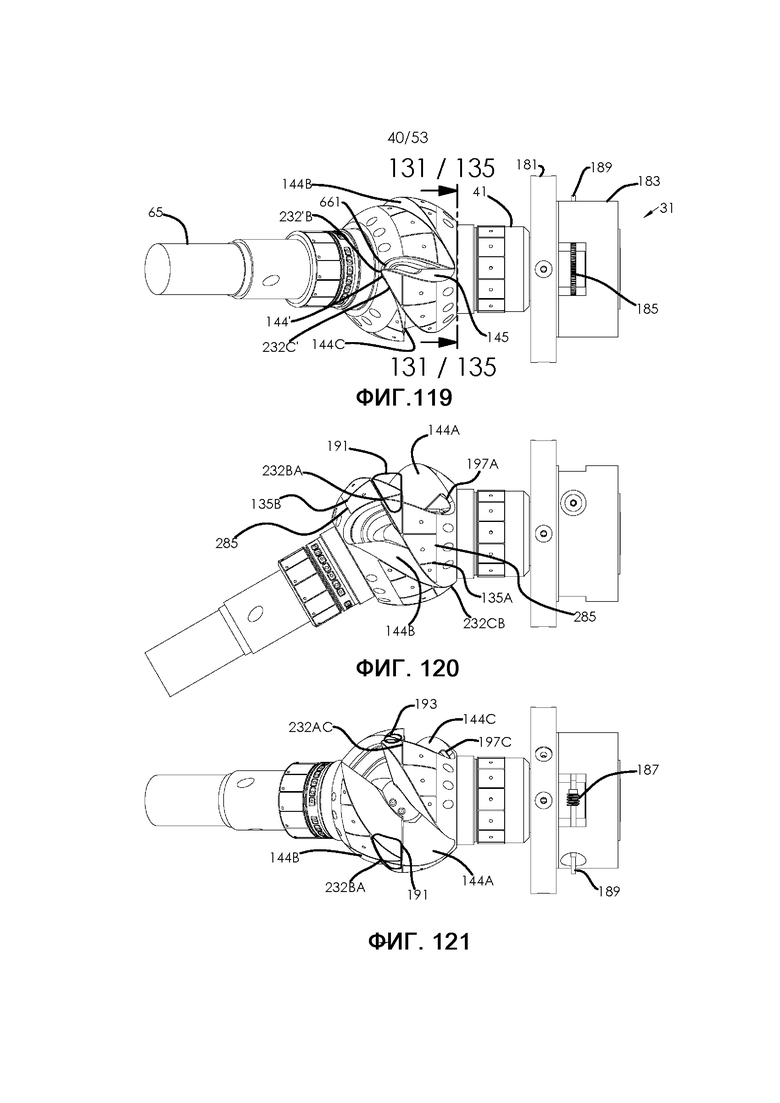
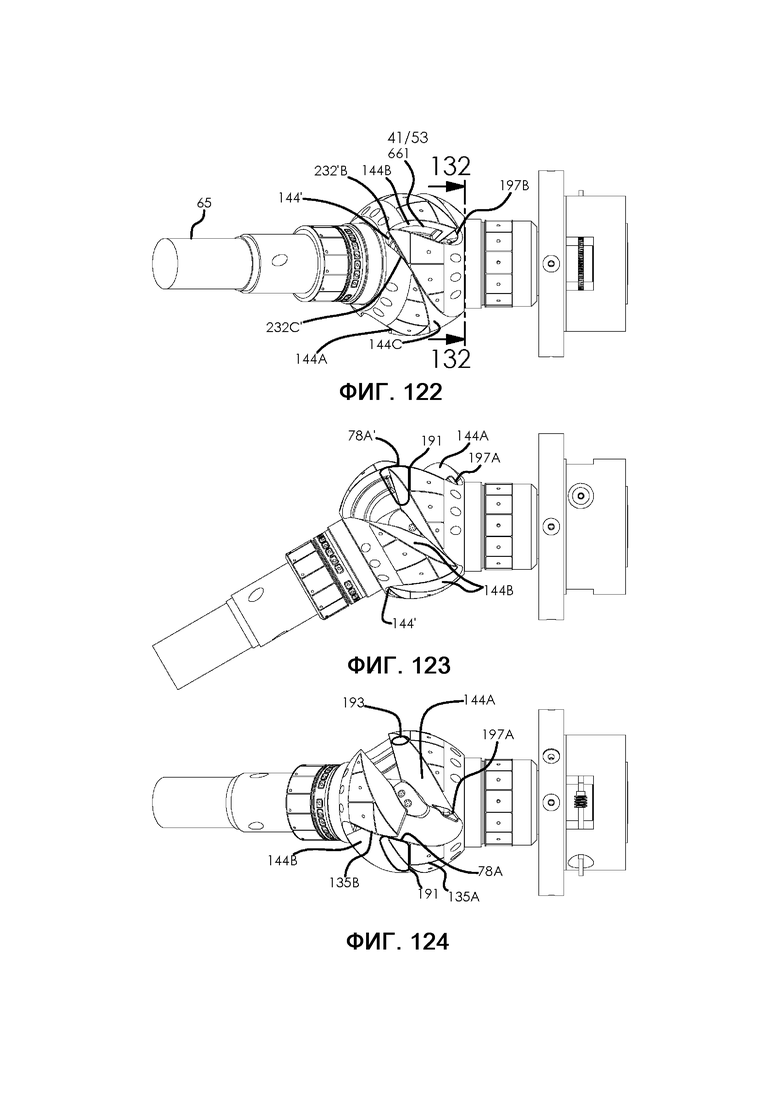
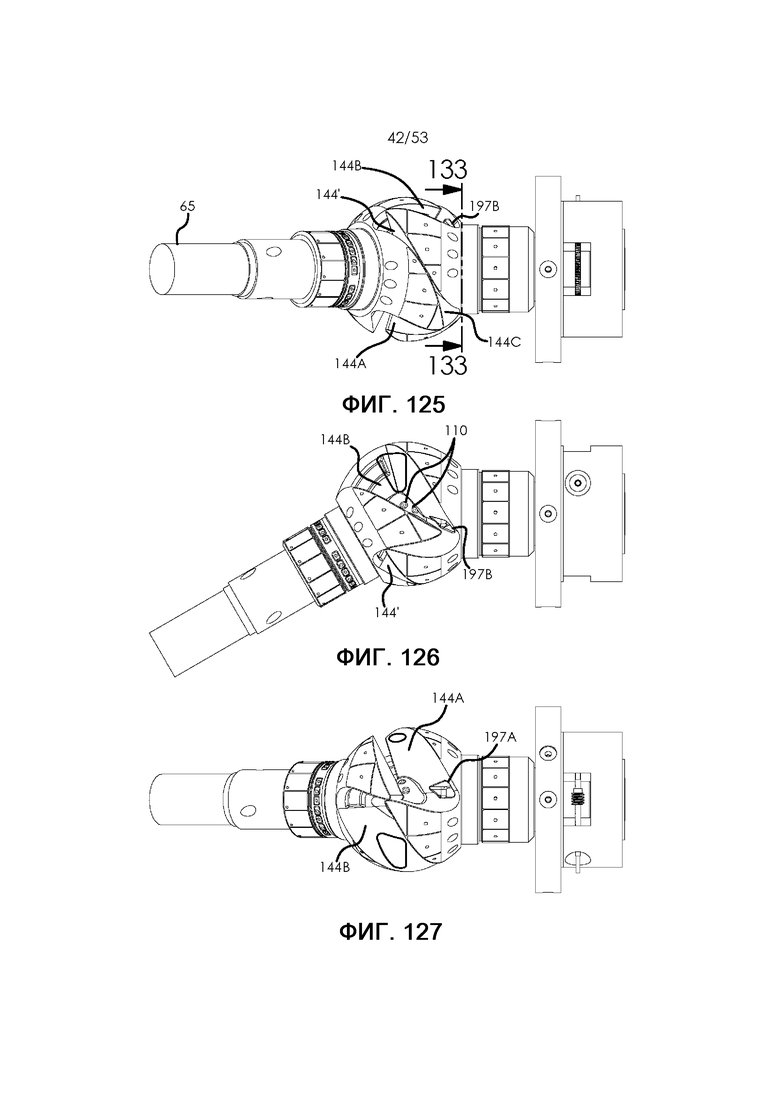
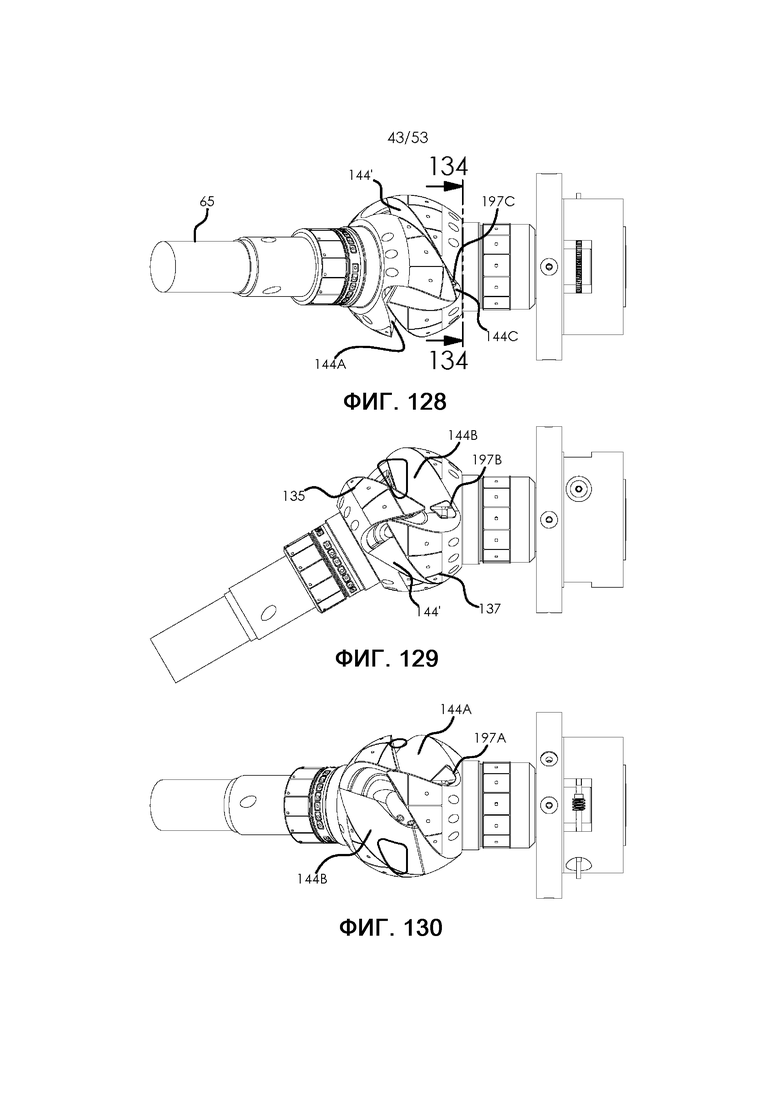
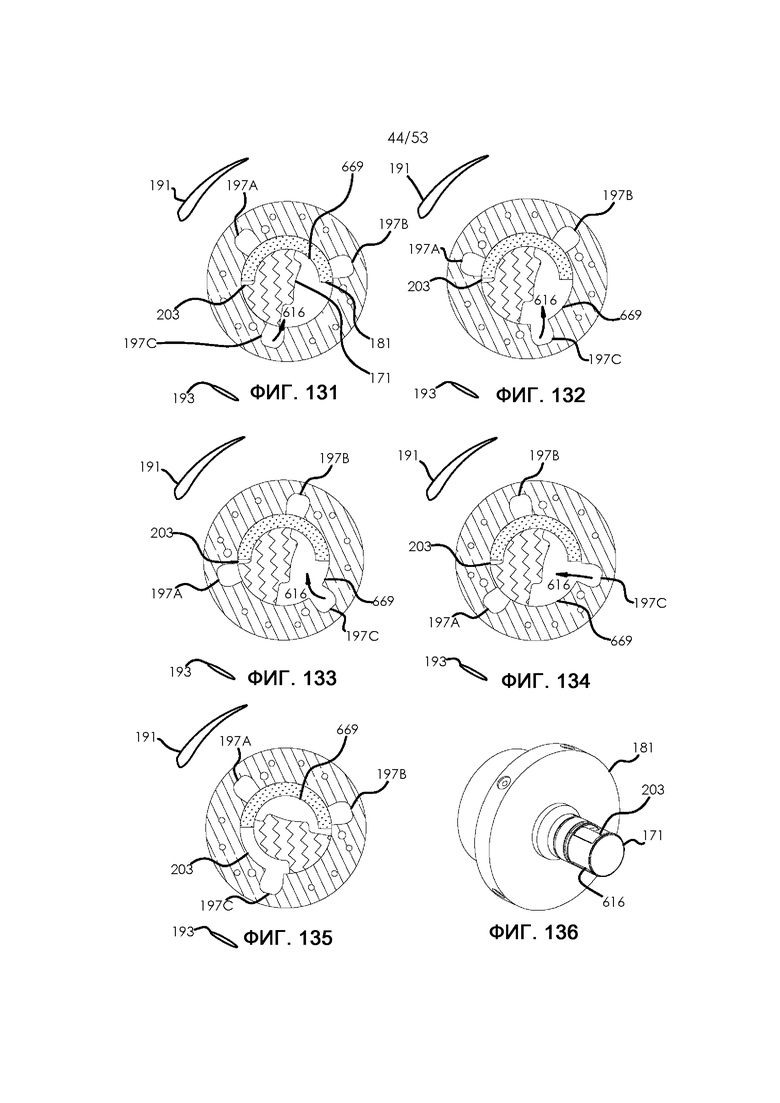
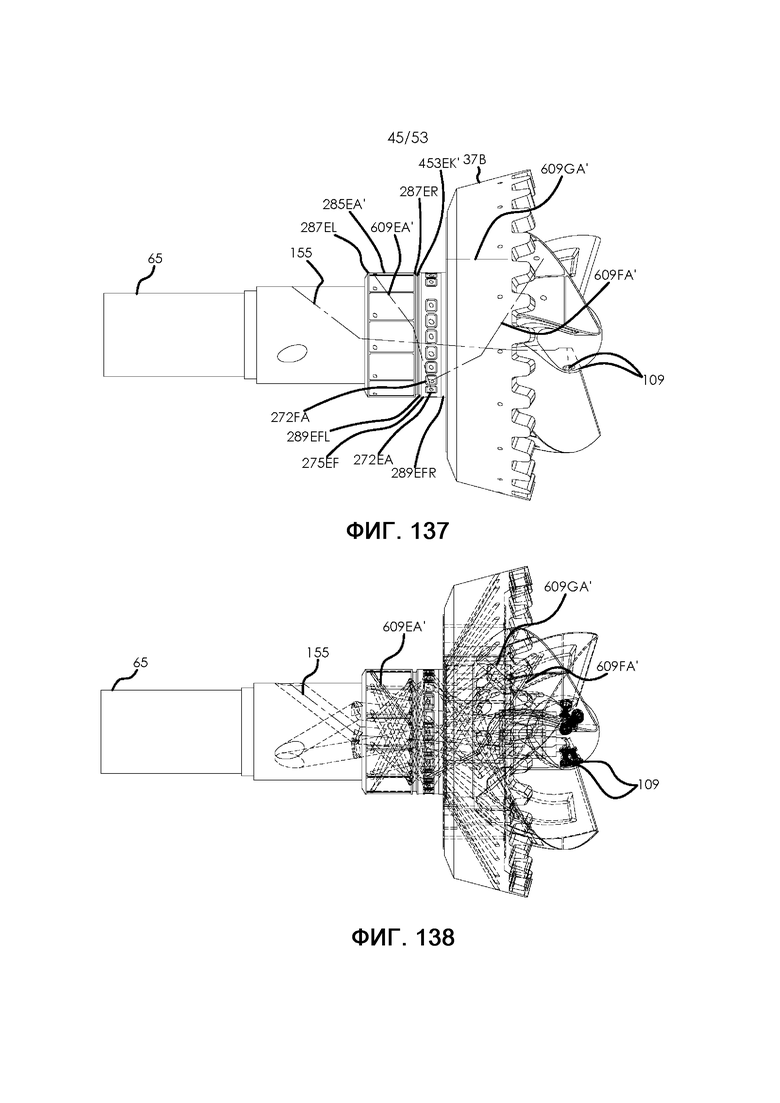
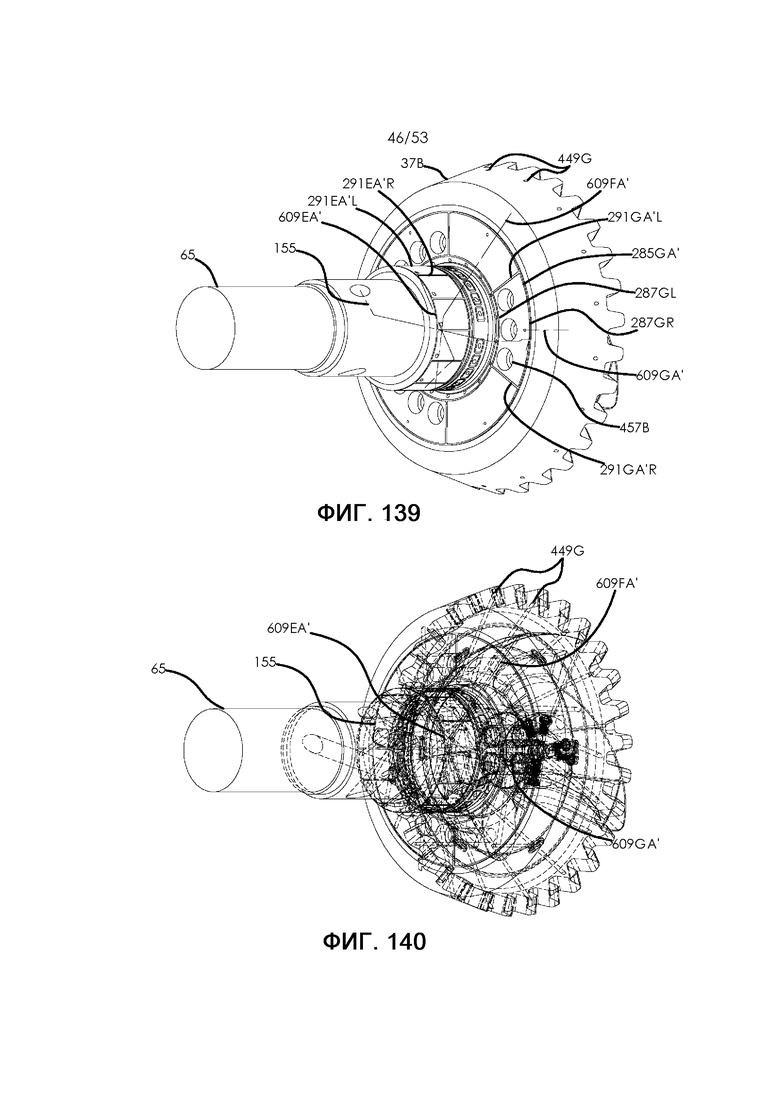
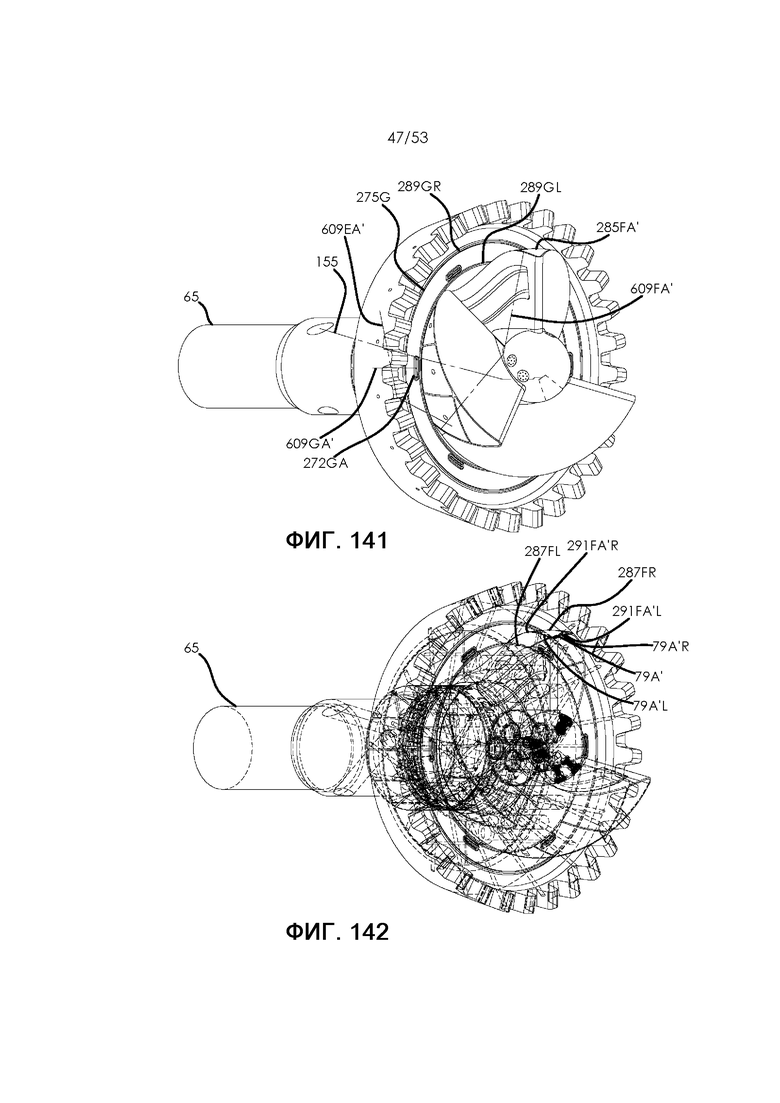
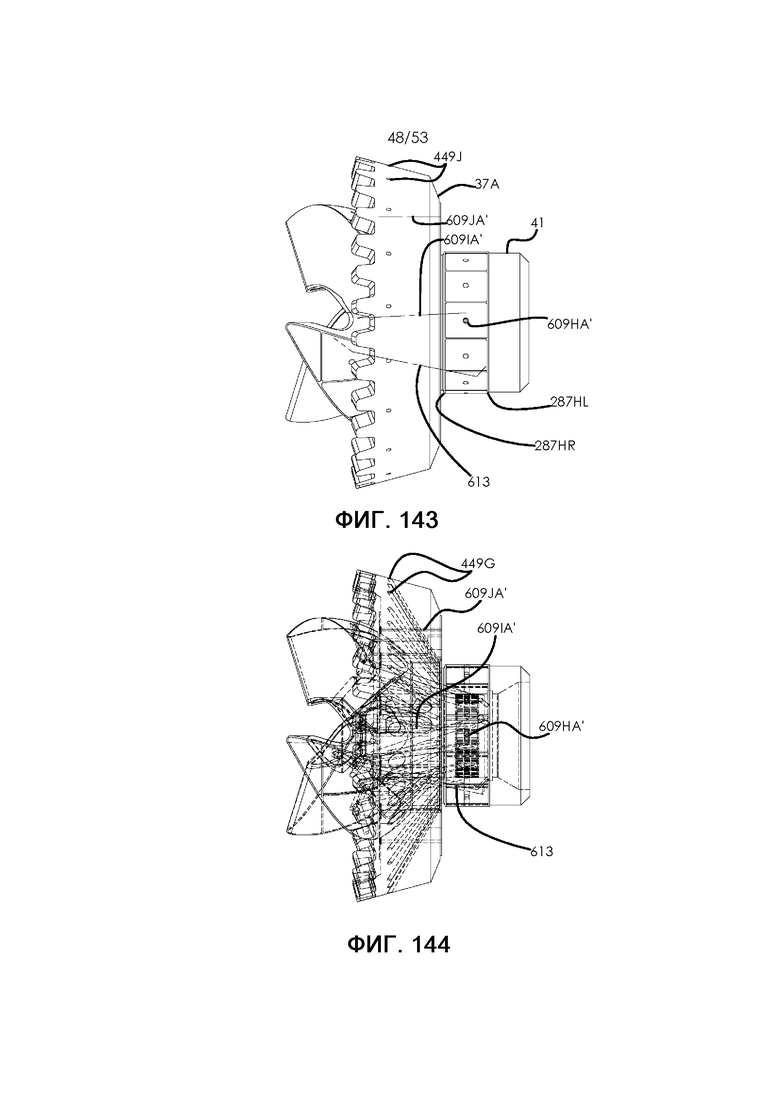
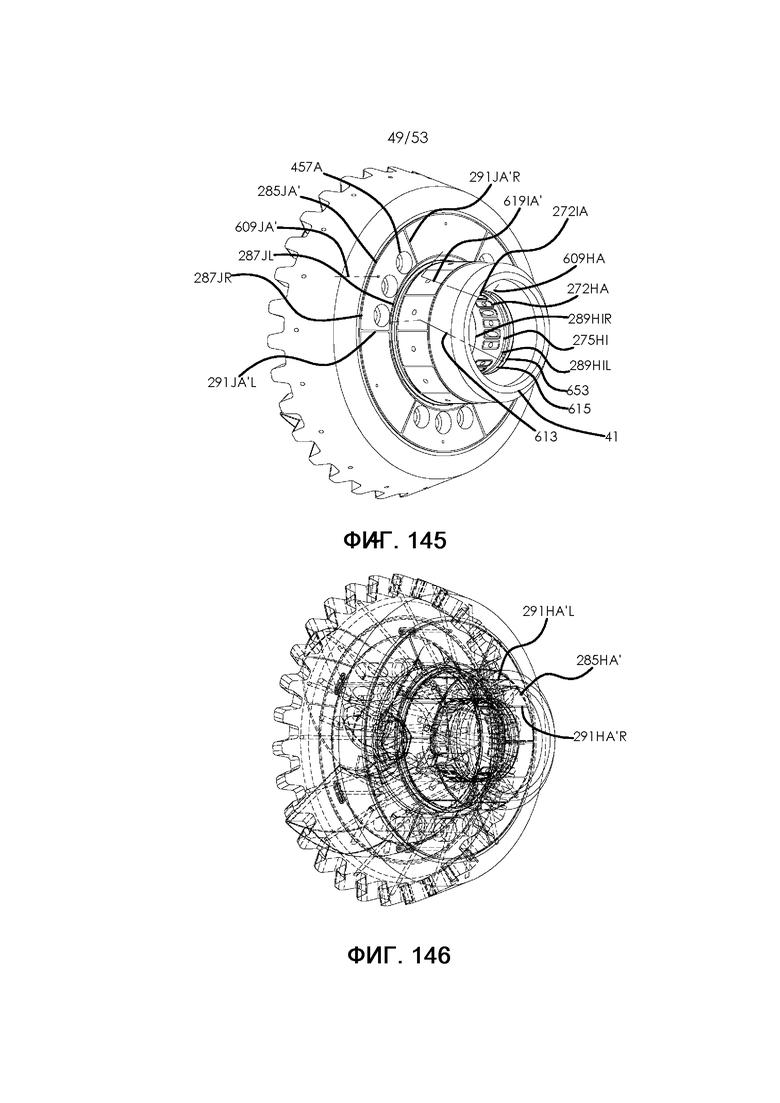
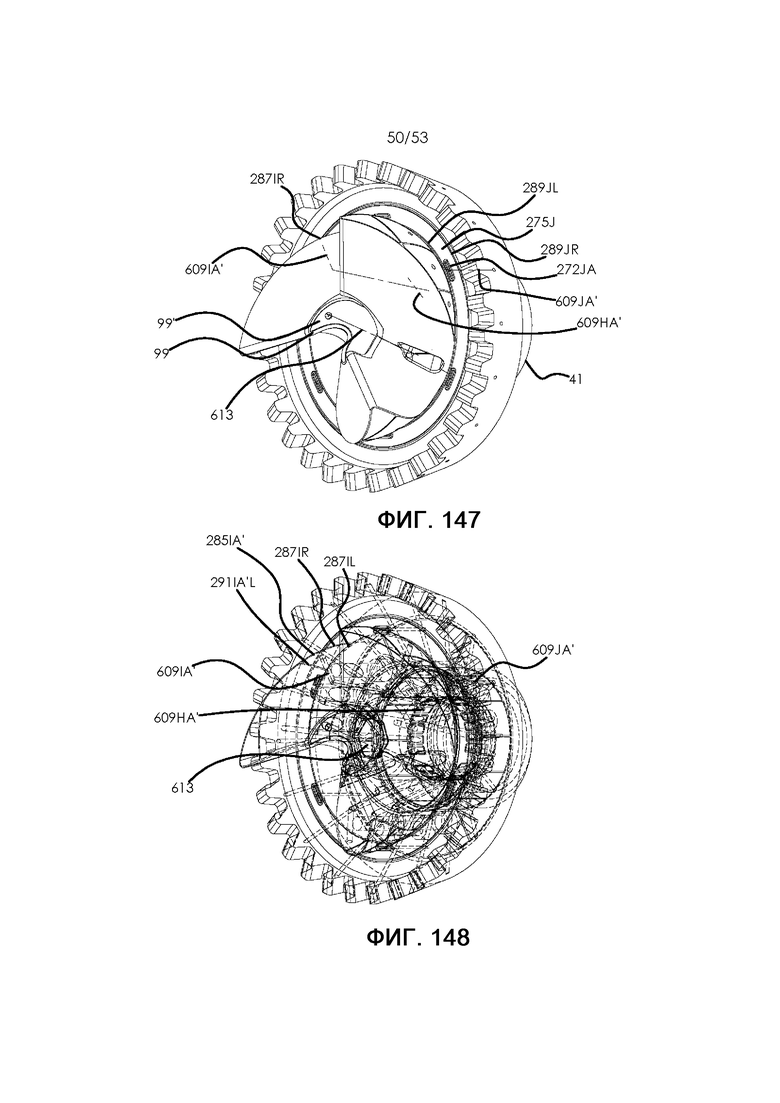
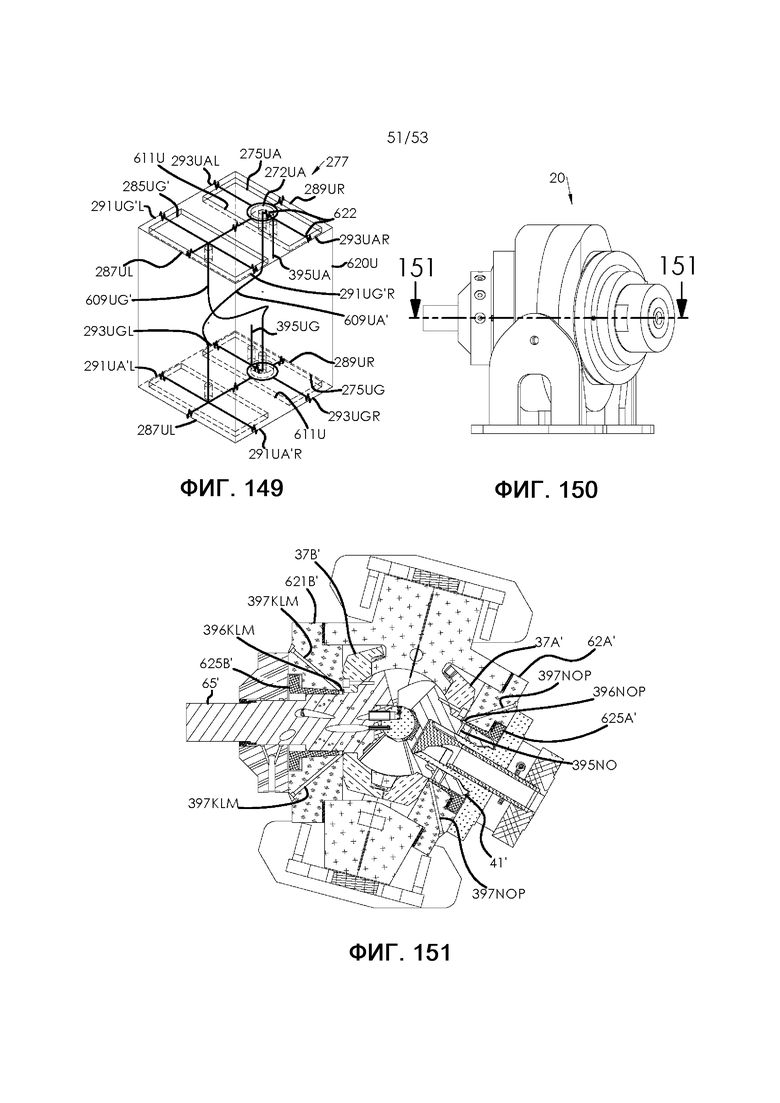
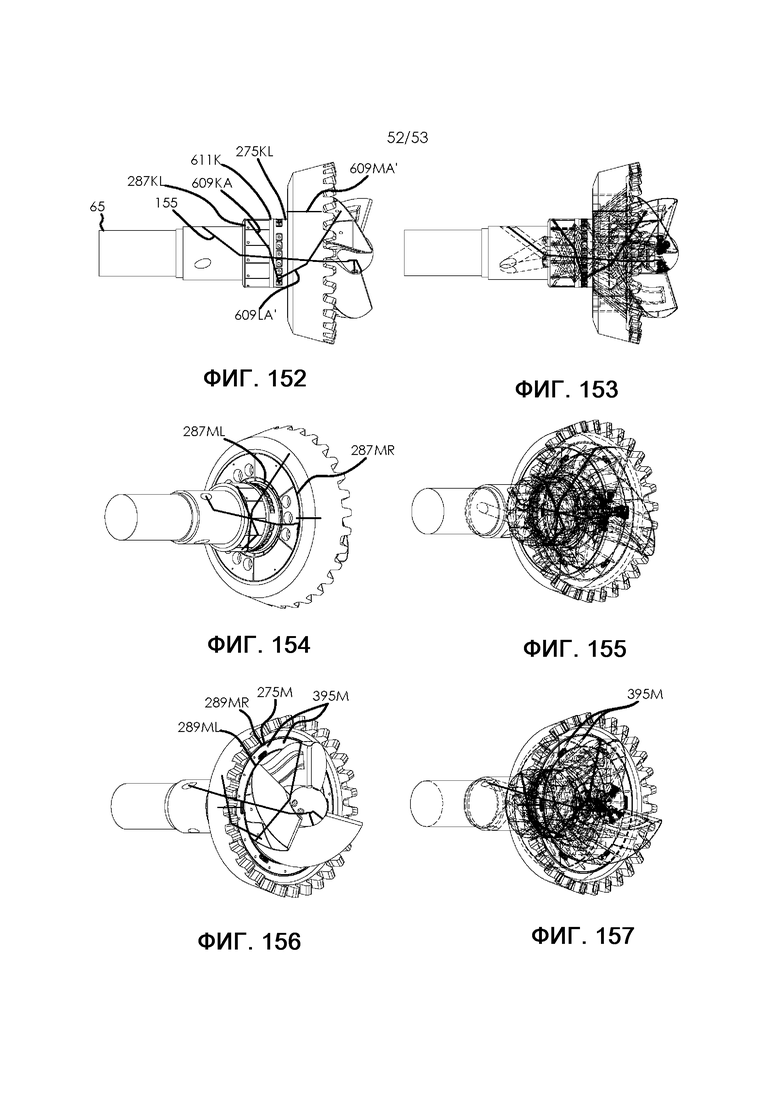
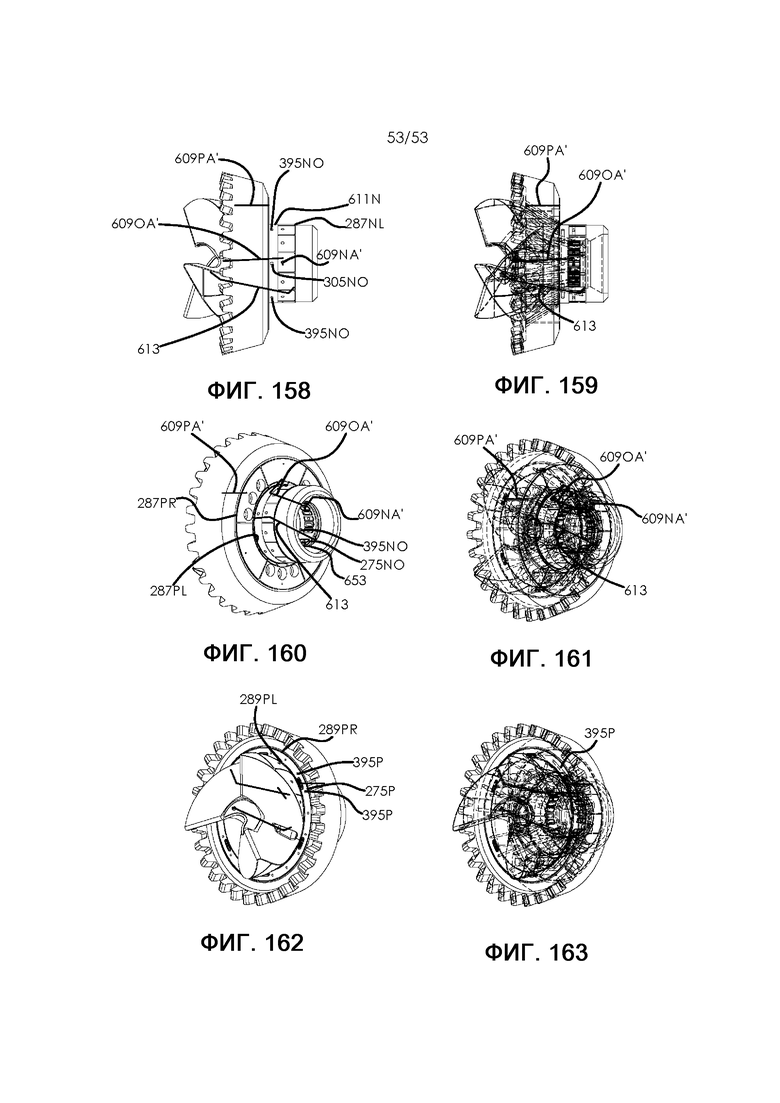
Группа изобретений относится к ротационным машинам. Машина (20) содержит корпус (55А) с вогнутой усеченно-сферической внутренней поверхностью, первый ротор с выпуклой усеченно-сферической наружной поверхностью, примыкающей к внутренней поверхности корпуса, по меньшей мере одну лопасть, ограничивающую по меньшей мере одну впадину, центр первого ротора в центре радиуса наружной поверхности первого ротора, гидростатический подшипник первого ротора, сформированный на его наружной поверхности. Гидростатический подшипник первого ротора содержит по меньшей мере один канал текучей среды через его наружную поверхность, поверхность, ограничивающую карман подшипника вокруг канала текучей среды первого ротора, по меньшей мере одну первую площадку вокруг первого кармана подшипника. Первая площадка выступает радиально наружу от первого кармана подшипника относительно центра первого ротора. Первая площадка непосредственно примыкает к внутренней поверхности корпуса с образованием гидравлического уплотнения у нее. Группа изобретений направлена на возможность достижения высоких степеней сжатия в сочетании с высоким давлением на выпуске и высокой объемной производительностью за единственную ступень. 3 н. и 18 з.п. ф-лы, 186 ил.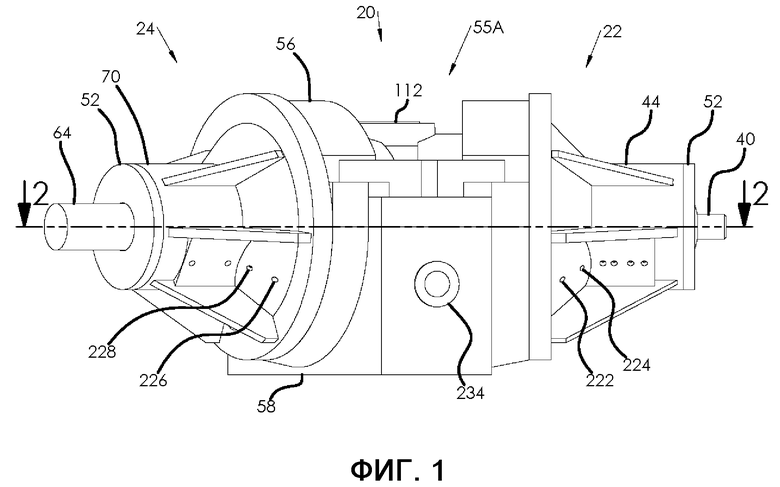
1. Ротационная машина (20), содержащая:
корпус (55), содержащий вогнутую усеченно-сферическую внутреннюю поверхность (114) корпуса;
первый ротор (76), содержащий выпуклую усеченно-сферическую наружную поверхность (62) первого ротора, примыкающую к внутренней поверхности (114) корпуса, по меньшей мере одну лопасть (78), ограничивающую по меньшей мере одну впадину (82), центр (77) первого ротора в центре радиуса наружной поверхности (62) первого ротора;
гидростатический подшипник (134) первого ротора, сформированный на наружной поверхности (62) первого ротора;
при этом гидростатический подшипник (134) первого ротора содержит: по меньшей мере один канал (108) текучей среды первого ротора через наружную поверхность (62) первого ротора, поверхность, ограничивающую карман (208) подшипника вокруг канала (108) текучей среды первого ротора, по меньшей мере одну первую площадку (206) вокруг первого кармана (208) подшипника;
при этом первая площадка (206) выступает радиально наружу от первого кармана (208) подшипника относительно центра (77) первого ротора (76);
и при этом первая площадка (206) непосредственно примыкает к внутренней поверхности (114) корпуса с образованием гидравлического уплотнения у нее.
2. Ротационная машина (20) по п. 1, в которой:
гидростатический подшипник (134) первого ротора образован структурой (593), включающей в себя по меньшей мере одну первую площадку (206) на наружной поверхности (62) первого ротора каждой по меньшей мере одной лопасти (78);
причем структура (593) по существу идентична на каждой по меньшей мере одной лопасти (78) первого ротора (76).
3. Ротационная машина (20) по п. 2, в которой гидростатический подшипник (134) первого ротора образован многомерной структурой (593).
4. Ротационная машина (20) по п. 1, в которой гидростатический подшипник (134) включает в себя:
источник текучей среды подшипника под давлением подачи текучей среды подшипника, при этом источник текучей среды подшипника связан по текучей среде с каналом (108) текучей среды первого ротора;
источник рабочей текучей среды с каналом (186) текучей среды через корпус (55) в камеру (144), частично ограниченную впадиной (82) первого ротора, при этом рабочая текучая среда подлежит сжатию в камере (144) до давления рабочей текучей среды по мере вращения первого ротора (76) относительно корпуса (55);
причем давление подачи текучей среды подшипника выше давления рабочей текучей среды.
5. Ротационная машина (20) по п. 1, дополнительно содержащая:
второй ротор (28), содержащий выпуклую усеченно-сферическую наружную поверхность (36) второго ротора, примыкающую к внутренней поверхности (114) корпуса, по меньшей мере одну лопасть (78), образующую по меньшей мере одну впадину (82), при этом впадина (82) второго ротора расположена вокруг лопасти (78) первого ротора (76), центр (77) второго ротора в центре радиуса наружной поверхности (36) второго ротора;
гидростатический подшипник (136) второго ротора, сформированный на наружной поверхности (36) второго ротора;
при этом гидростатический подшипник (136) второго ротора содержит: по меньшей мере один канал (108) текучей среды второго ротора через наружную поверхность (36) второго ротора, поверхность, ограничивающую второй карман (208) подшипника вокруг канала (108) текучей среды второго ротора, вторую площадку (206) вокруг второго кармана (208) подшипника;
при этом вторая площадка (206) подшипника выступает радиально наружу от кармана (208) подшипника относительно центра (77) второго ротора (28);
при этом площадка (206) непосредственно примыкает к внутренней поверхности (114) корпуса.
6. Ротационная машина (20) по п. 1, в которой по меньшей мере гидростатический подшипник (134) первого ротора радиально отстоит от впадины (82) первого ротора (76).
7. Ротационная машина (20) по п. 1, дополнительно содержащая:
первый вал (64), проходящий от первого ротора (76), при этом первый вал (64) расположен аксиально напротив лопастей (78) первого ротора (76);
канал (216) текучей среды, связанный по текучей среде с по меньшей мере одним каналом (108) текучей среды первого ротора;
при этом канал (216) текучей среды проходит по существу аксиально вдоль первого вала (64).
8. Ротационная машина (20), содержащая:
первый ротор (76), содержащий выпуклую усеченно-сферическую наружную поверхность (62) первого ротора, примыкающую к внутренней поверхности (114) корпуса, по меньшей мере одну лопасть (78), образующую по меньшей мере одну впадину (82), центр (77) первого ротора в центре радиуса наружной поверхности (62) первого ротора;
при этом первый ротор (76) содержит поверхность (86) вставки первого ротора у центра радиуса лопасти (78), впадину (82), при этом поверхность (86) вставки первого ротора имеет ось, по существу параллельную оси (639) вращения первого ротора (76);
первую вставку (94), расположенную с возможностью удаления в пределах поверхности (86) вставки первого ротора;
при этом первая вставка содержит усеченно-сферическую внутреннюю поверхность;
и усеченно-сферическую вставку, вставленную с возможностью удаления в усеченно-сферическую внутреннюю поверхность первой вставки,
и при этом первая вставка (94) выполнена с возможностью взаимодействия со вторым ротором (28) и образования гидравлического уплотнения у него.
9. Ротационная машина (20) по п. 8, дополнительно содержащая:
второй ротор (28), содержащий поверхность (86) вставки второго ротора у центра радиуса лопасти (78), впадину (82) второго ротора (28), при этом поверхность (86) вставки второго ротора имеет ось, по существу параллельную оси вращения (637) второго ротора (28);
вторую вставку (90), расположенную с возможностью удаления в пределах поверхности (86) вставки второго ротора;
при этом вторая вставка (90) второго ротора выполнена с возможностью взаимодействия с первой вставкой (94) первого ротора (76) с образованием гидравлического уплотнения у нее.
10. Ротационная машина (20) по п. 9, дополнительно содержащая: по меньшей мере одну форсунку (110) текучей среды на второй вставке (90);
при этом по меньшей мере одна форсунка (110) текучей среды расположена по существу по одной линии с впадинами (82) второго ротора (28);
по меньшей мере один канал (153) текучей среды вставки, проходящий через вторую вставку (90) ко второму ротору (28) по существу параллельно оси вращения второго ротора (28);
при этом канал (153) текучей среды вставки проходит через второй ротор (28).
11. Ротационная машина (20) по п. 10, в которой по меньшей мере одна форсунка (110) текучей среды съемно прикреплена ко второй вставке (90).
12. Ротационная машина по п. 10, в которой в по меньшей мере одну форсунку (110) текучей среды выборочно подают охлаждающую среду.
13. Ротационная машина (20) по п. 10, в которой:
второй ротор (28) прикреплен ко второму валу (40), содержащему по существу цилиндрическую наружную поверхность;
при этом машина дополнительно содержит:
множество проемов (152) текучей среды в поверхности вала, проходящих по существу аксиально в пределах второго вала (40) от каналов (153) текучей среды вставки;
при этом канал (150) корпуса на корпусе (55) расположен по одной линии с проемами (152) текучей среды в поверхности вала для обеспечения прохода текучей среды от корпуса (55) вокруг второго вала (40) к по меньшей мере одной форсунке (110) текучей среды.
14. Ротационная машина по п. 13, содержащая:
множество радиально противоположных проемов (152) в поверхности вала, радиально противоположно сформированных, соединенных по текучей среде с каналом (153) текучей среды вставки.
15. Ротационная машина (20) по п. 13, содержащая:
скользящий цилиндр (158), прикрепленный к корпусу (55), охватывающий второй вал (40) вокруг множества проемов (152) в поверхности вала;
при этом скользящий цилиндр (158) содержит множество поверхностей, ограничивающих проемы (146) в нем;
при этом предусмотрена возможность последовательного выравнивания проемов (146) скользящего цилиндра по одной линии с множеством проемов (152) в поверхности вала с образованием временного канала текучей среды между каналом (150) текучей среды корпуса и форсунками (110) текучей среды.
16. Ротационная машина (20) по п. 15, в которой скользящий цилиндр (154) включает в себя:
внутренний цилиндр (156) с поверхностями, ограничивающими проемы (148) скользящего цилиндра в нем;
скользящий цилиндр (158) с множеством поверхностей, ограничивающих проемы (146) скользящего цилиндра в нем, расположенные по одной линии с поверхностями, ограничивающими проемы (148) скользящего цилиндра во внутреннем цилиндре (156);
при этом скользящий цилиндр (158) плотно соединен с внутренним цилиндром (156) и выполнен с возможностью вращения относительно него для регулирования выравнивания поверхностей, ограничивающих проемы (146) скользящего цилиндра в скользящем цилиндре, относительно поверхностей, ограничивающих проемы (148) скользящего цилиндра во внутреннем цилиндре, для выборочного ограничения потока текучей среды к форсункам (110) текучей среды.
17. Ротационная машина (20) по п. 15, содержащая:
внутренний цилиндр (627) с поверхностями, ограничивающими проемы (159) скользящего цилиндра в нем;
при этом предусмотрена возможность выборочной подачи текучей среды в проемы (159) скользящего цилиндра во внутреннем цилиндре (627).
18. Ротационная машина (20) по п. 9, в которой внутренняя поверхность (86) первого ротора геометрически выполнена по форме, выбранной из перечня, включающего в себя: усеченный цилиндр, усеченный конус и многогранную призму.
19. Ротационная машина (20), содержащая:
корпус (55);
первый ротор (76) с валом (64) ротора в пределах корпуса (55), наружную поверхность с гидростатическим подшипником (134), выполненным с возможностью взаимодействия с внутренней поверхностью (114) корпуса;
кольцо (38), установленное на валу (64) ротора;
при этом кольцо (38) содержит переднюю поверхность, аксиально обращенную к первому ротору (76);
при этом кольцо (38) содержит тыльную поверхность, аксиально обращенную в сторону, противоположную первому ротору (76);
передний самокомпенсирующийся гидростатический подшипник (118), выполненный с возможностью взаимодействия с передней поверхностью кольца (38);
при этом передний самокомпенсирующийся гидростатический подшипник содержит: по меньшей мере один канал текучей среды первого ротора, поверхность, ограничивающую карман подшипника вокруг канала текучей среды, по меньшей мере одну площадку вокруг кармана подшипника, причем площадка выступает от кармана подшипника; причем площадка непосредственно примыкает к внутренней поверхности (114) корпуса с образованием гидравлического уплотнения у нее;
причем передний самокомпенсирующийся гидростатический подшипник (118) уравновешивает прикладываемое гидростатическим подшипником (134) усилие между наружной поверхностью первого ротора и внутренней поверхностью (114) корпуса.
20. Ротационная машина (20) по п. 19, дополнительно содержащая:
задний самокомпенсирующийся гидростатический подшипник (120), выполненный с возможностью взаимодействия с тыльной поверхностью кольца (38);
причем задний самокомпенсирующийся гидростатический подшипник (120) выполнен с возможностью уравновешивания усилия, прикладываемого вызванным давлением усилием рабочей текучей среды в камере (144) сжатия, частично ограниченной корпусом (55).
21. Ротационная машина (20) по п. 19, дополнительно содержащая:
зубчатую передачу, механически соединяющую первый ротор (76) со вторым ротором (28); причем кольцо (38) выполнено с возможностью взаимодействия с зубчатой передачей для пошагового перемещения первого ротора (76) ко второму ротору (28).
| US 2015260184 A1, 17.09.2015 | |||
| US 2001031215 A1, 18.10.2001 | |||
| US 2013281220 A1, 24.10.2013 | |||
| US 2002043238 A1, 18.04.2002 | |||
| US 6705161 B1, 16.03.2004 | |||
| РОТОРНЫЙ УЗЕЛ (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ЭНЕРГИИ | 2009 |
|
RU2549007C2 |
| ОБЪЕМНАЯ СФЕРИЧЕСКАЯ РОТОРНАЯ МАШИНА | 1999 |
|
RU2156862C1 |

