Изобретение относится к области радионавигации и радиосвязи и направлено на получение оценок пространственно-временного состояния группы подвижных объектов, использующих локальную навигацию.
Пространственно-временное состояние подвижных объектов в составе группы из N равноправных подвижных объектов, можно определить любым доступным способом, включая использование глобальных навигационных спутниковых систем (ГНСС), например, [1, 2, 3]. При этом N подвижных объектов должны определить свои координаты в общедоступной системе координат с использованием ГНСС и передавать их всем остальным подвижным объектам группы для координации совместных действий. Однако применение ГНСС для определения местоположения подвижных объектов может быть ограничено из-за недоступности приема навигационных сигналов ГНСС вследствие наличия электромагнитных помех и/или недостоверности навигационной информации из-за искажения навигационного поля. Кроме того, открытая передача абсолютных (привязанных к общедоступной системе координат) данных о местоположении объектов может привести к несанкционированному использованию этих данных для деструктивного воздействия на подвижные объекты.
Задачей данного изобретения является обеспечение мониторинга пространственно-временного состояния подвижных объектов без привязки местоположения объектов к общедоступной системе координат с целью повышения скрытости и живучести объектов и исключению передачи по линиям радиосвязи данных о местоположении объектов в интересах предотвращения их несанкционированного использования для деструктивного воздействия на эти объекты.
В общедоступных источниках не обнаружены способы или системы мониторинга пространственно-временного состояния группы подвижных объектов при локальной навигации без привязки местоположения объектов к общедоступной системе координат.
Предлагаемый способ мониторинга пространственно-временного состояния группы подвижных объектов при локальной навигации основан на взаимодействии N равноправных одинаковых по техническому оснащению подвижных объектов группы, в состав которых входят технические средства: устройство сбора данных и расчета координат, дисплей, штатная радиостанция, штатная гарнитура, блок управления мониторингом, и M разнесенных в пространстве опорных приемопередатчиков с известными локальными координатами, и обеспечивает взаимную осведомленность каждого подвижного объекта о пространственно-временном состоянии всех подвижных объектов группы путем определения собственных локальных координат подвижного объекта на основании значений интервалов времени, пропорциональных расстояниям между подвижным объектом и опорными приемопередатчиками, измеренных подвижным объектом запросным способом, и определения подвижным объектом локальных координат других подвижных объектов группы на основании измеренных значений интервалов времени между запросными сигналами других подвижных объектов и ответными сигналами опорных приемопередатчиков на запросы других подвижных объектов, принятыми техническими средствами подвижного объекта, с использованием информации о собственных локальных координатах подвижного объекта, при этом расчет локальных координат самого подвижного объекта и локальных координат других подвижных объектов группы осуществляется в устройстве сбора данных и расчета координат подвижного объекта путем решения систем линейных уравнений, связывающих искомые координаты подвижного объекта, координаты опорных приемопередатчиков, и измеренные значения временных интервалов, с дальнейшим отображением рассчитанных локальных координат подвижных объектов на экране дисплея одним из известных способов, например в виде отметок на фоне карты местности.
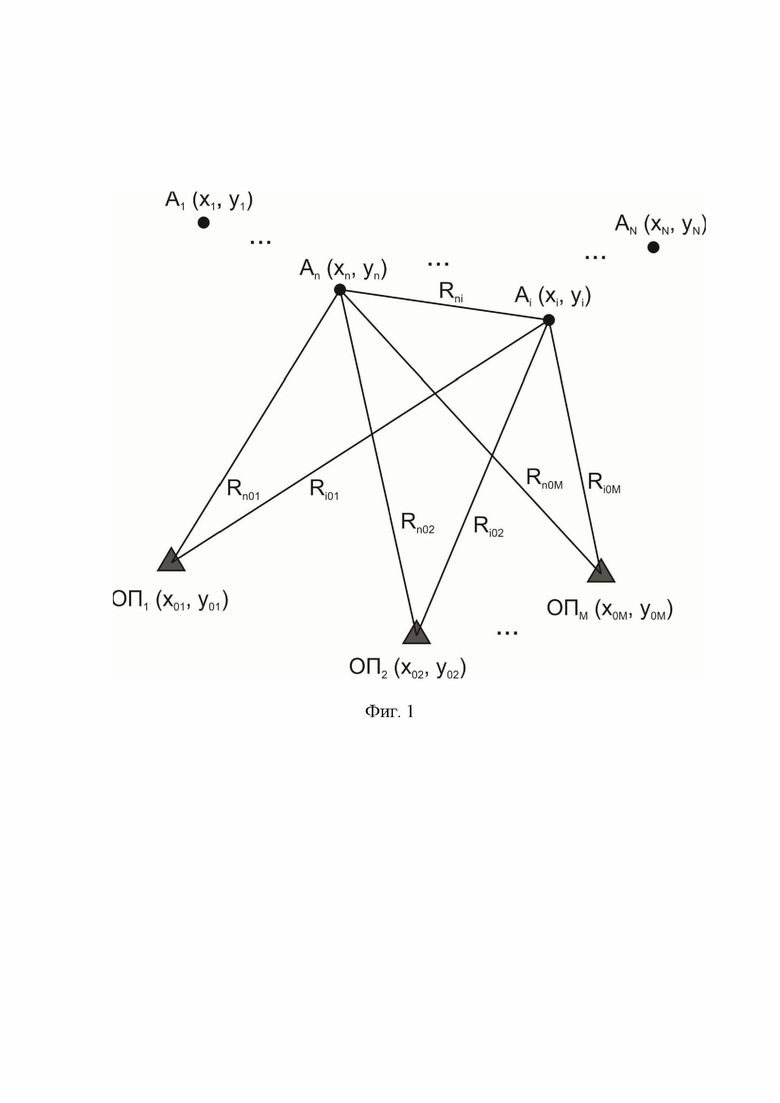
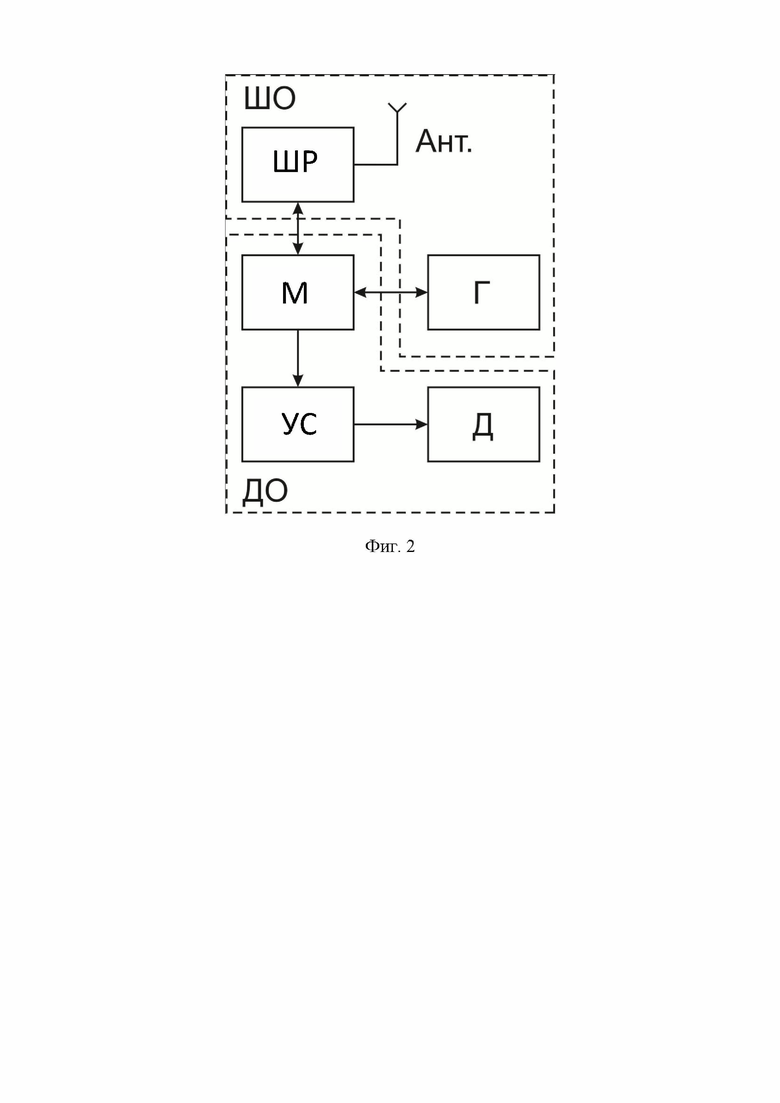
Сущность изобретения поясняется рисунками, где на фиг. 1 показана схема взаимодействия подвижных объектов и опорных приемопередатчиков в процессе мониторинга пространственно-временного состояния подвижных объектов группы, на фиг. 2 показана структурная схема технических средств подвижного объекта.
Способ мониторинга пространственно-временного состояния группы подвижных объектов при локальной навигации реализуется группой из N равноправных подвижных объектов Аn, n=1, …, N, в состав которых входят штатное оборудование ШО состоящее из штатной радиостанции ШРn, штатная гарнитура Гn, и дополнительное оборудование ДО состоящее из блока управления мониторингом Мn, устройства сбора данных и расчета координат УСn, дисплея Дn, взаимодействующих с М разнесенными в пространстве опорными приемопередатчикамми ОПm, с известными координатами x0m, y0m (m=1, …, M).
Способ мониторинга пространственно-временного состояния группы подвижных объектов при локальной навигации осуществляется следующим образом.
Первоначально каждый подвижный объект Аn, n=1, …, N, определяет собственные координаты (xn, yn), для чего при нажатии на тангенту гарнитуры Гn при переводе штатной радиостанции ШРn в режим «Передача» с помощью блока управления мониторингом Мn формируется кодограмма «Запрос дальности» (ЗДn) содержащая уникальный идентификационный номер, которая через штатную радиостанцию ШРn передается на опорные приемопередатчики ОПm, с фиксацией времени ее передачи tЗДn в блоке управления мониторингом Мn. От опорных приемопередатчиков ОПm, m=1, …, M, на подвижный объект Аn приходят кодограммы «Ответ дальности» (ОДnm), которые принимаются штатной радиостанцией ШРn и передаются в блок управления мониторингом Мn подвижного объекта Аn, где фиксируется время их приема tОДnm и измеряются задержки ∆tnm=tОДnm-tЗДn. Измеренные задержки ∆tnm, m=1, …, M, передаются в устройство сбора данных и расчета координат УСn, для расчета собственных координат (xn, yn) подвижного объекта Аn дальномерным методом путем решения системы уравнений
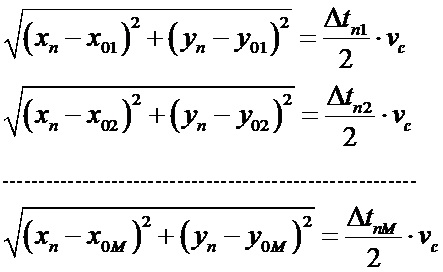
относительно xn и yn одним из численных методов [4, 5, 6], где νс - скорость распространения радиоволны, равная скорости света.
Определение подвижным объектом Аn, n=1, …, N, координат (xi, yi) другого подвижного объекта группы Аi, i=1, …, N, i ≠ n, осуществляется следующим образом. В процессе определения собственных координат подвижный объект Аi, формирует и излучает кодограмму «Запрос дальности» (ЗДi), которая принимается штатной радиостанцией ШРn подвижного объекта Аn, и передается в блок управления мониторингом Мn с фиксацией времени ее приема tЗДi и идентифицируя его как Аi. Опорные приемопередатчики ОПm, m=1, …, M, в ответ на кодограмму «Запрос дальности» (ЗДi) подвижного объекта Аi формируют и излучают кодограммы «Ответ дальности» (ОДim), которые принимаются штатной радиостанцией ШРn подвижного объекта Аn, и передается в блок управления мониторингом Мn с фиксацией времени их приема tОДim и с измерением задержек ∆tim=tОДim-tЗДi. Измеренные задержки ∆tim, m=1 ,.…., M, передаются в устройство сбора данных и расчета координат УСn, для расчета координат (xi, yi) подвижного объекта Аi разностно-дальномерным методом, для чего:
1) составляется системы уравнений
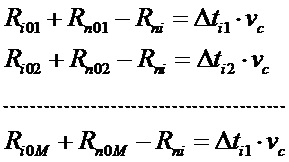
где 


2) полученная система уравнений преобразуется путем вычитания первого уравнения из всех оставшихся уравнений системы и переноса известных составляющих в правую часть уравнений с составлением системы уравнений для разностно-дальномерного метода

которая решается относительно xi и yi одним из численных методов [4, 5, 6].
Рассчитанные устройством сбора и расчета координат УСn собственные координаты (xn, yn) подвижного объекта Аn, а также координаты (xi, yi) других подвижных объектов Аi группы выводятся на экране дисплея Дn одним из известных способов, например в виде отметок на фоне карты местности.
Таким образом обеспечивается взаимная осведомленность каждого подвижного объекта группы Аn о своем пространственно-временном состоянии и о пространственно-временном состоянии всех остальных подвижных объектов группы в условиях локальной навигации. При этом между подвижными объектами группы не требуется дополнительный обмен информацией, которая могла бы быть несанкционированно использована для организации деструктивного воздействия на подвижные объекты.
Источники информации
1. Журавлев, А.В. Навигационные комплексы наземных мобильных средств военного назначения [Текст]: монография / А.В. Журавлев. - Воронеж: Издательско-полиграфический центр «Научная книга», 2017. —
290 с.
2. Тяпкин В.Н., Гарин Е.Н. Методы определения навигационных параметров подвижных средств с использованием спутниковой радионавигационной системы ГЛОНАСС: – Красноярск: Сиб. федер. ун-т, 2012. – 260 с.
3. Амиров А.Ж., Когай Г.Д., Хамзина М.С. Система спутникового мониторинга подвижных объектов. «Молодой учёный» . № 4 (108) . Февраль, 2016 г. С.8-9.
4. Кирюшкин В.В., Волков Н.С., Супрунов А.В. Использование навигационных позиционных методов определения координат в задаче наблюдения воздушных целей // Труды XXIV международной научно-технической конференции «Радиолокация, навигация и связь» - 2018, т.3, с.163-175.
5. Маркин В.Г. Расчет координат объектов в разностно-дальномерной системе и анализ погрешностей расчета. Радиотехника, №12, 2013г., с.81-85.
6. Шебшаевич В.С. Сетевые спутниковые радионавигационные системы / В.С. Шебшаевич, П.П. Дмитриев, Н.В. Иванцевич и др.; Под ред. П.П. Дмитриева и В.С. Шебшаевича. – М.: Радио и связь, 1982. – 272 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ мониторинга пространственно-временного состояния группы подвижных объектов | 2023 |
|
RU2809923C1 |
| Способ локальной радионавигации подвижного объекта | 2023 |
|
RU2802050C1 |
| ПРОСТРАНСТВЕННО-РАСПРЕДЕЛЕННЫЙ КОМПЛЕКС СРЕДСТВ СОЗДАНИЯ РАДИОПОМЕХ | 2014 |
|
RU2563972C1 |
| Способ локальной радионавигации по сигналам несинхронизированных отечественных средств радиоэлектронного подавления глобальных навигационных спутниковых систем | 2021 |
|
RU2770127C1 |
| Пространственно-распределительный комплекс создания радиопомех навигационной аппаратуре потребителей глобальных навигационных систем с многофункциональным использованием радиоэлектронного оборудования | 2015 |
|
RU2616286C1 |
| Способ первичного отождествления позиционных измерений и определения местоположения целей в наземной пространственно распределенной радионавигационной системе в условиях многоцелевой обстановки | 2018 |
|
RU2692702C1 |
| Способ первичного отождествления позиционных измерений и определения местоположения целей в наземной пространственно распределенной радионавигационной системе в условиях многоцелевой обстановки | 2018 |
|
RU2692698C1 |
| Способ определения местоположения абонентских терминалов, перемещающихся в зоне покрытия локальной системы навигации | 2023 |
|
RU2825248C1 |
| Навигационная аппаратура санкционированного потребителя с возможностью локальной навигации по сигналам несинхронизированных отечественных средств радиоэлектронного подавления глобальных навигационных спутниковых систем | 2021 |
|
RU2771435C1 |
| Станция радиоподавления приемной аппаратуры спутников-ретрансляторов низкоорбитальной системы спутниковой связи | 2018 |
|
RU2695810C1 |
Изобретение относится к области радионавигации и радиосвязи при осуществлении локальной навигации. Сущность предлагаемого способа мониторинга пространственно-временного состояния группы подвижных объектов заключается во взаимодействии N одинаковых по техническому оснащению подвижных объектов группы, в состав которых входят: устройство сбора данных и расчета координат, дисплей, штатная радиостанция, штатная гарнитура, блок управления мониторингом, M разнесенных в пространстве опорных приемопередатчиков с известными локальными координатами. Обеспечение взаимной осведомленности каждого подвижного объекта о пространственно-временном состоянии всех объектов группы производится путем определения собственных локальных координат подвижного объекта на основании значений интервалов времени, пропорциональных расстояниям между подвижным объектом и опорными приемопередатчиками, измеренных запросным способом. При этом определение подвижным объектом локальных координат других подвижных объектов группы на основании измеренных значений интервалов времени между запросными сигналами других подвижных объектов и ответными сигналами опорных приемопередатчиков на запросы других подвижных объектов, принятыми техническими средствами подвижного объекта, осуществляется за счёт использования информации о собственных локальных координатах подвижного объекта. Расчет локальных координат самого подвижного объекта и локальных координат других подвижных объектов группы осуществляется устройством сбора данных и расчета координат подвижного объекта решением систем линейных уравнений, связывающих искомые координаты подвижного объекта, координаты опорных приемопередатчиков, и измеренные значения временных интервалов, с дальнейшим отображением рассчитанных локальных координат подвижных объектов на экране дисплея одним из известных способов, например в виде отметок на фоне карты местности. Техническим результатом заявленного изобретения является обеспечение мониторинга пространственно-временного состояния подвижных объектов без привязки местоположения объектов к общедоступной системе координат. 2 ил.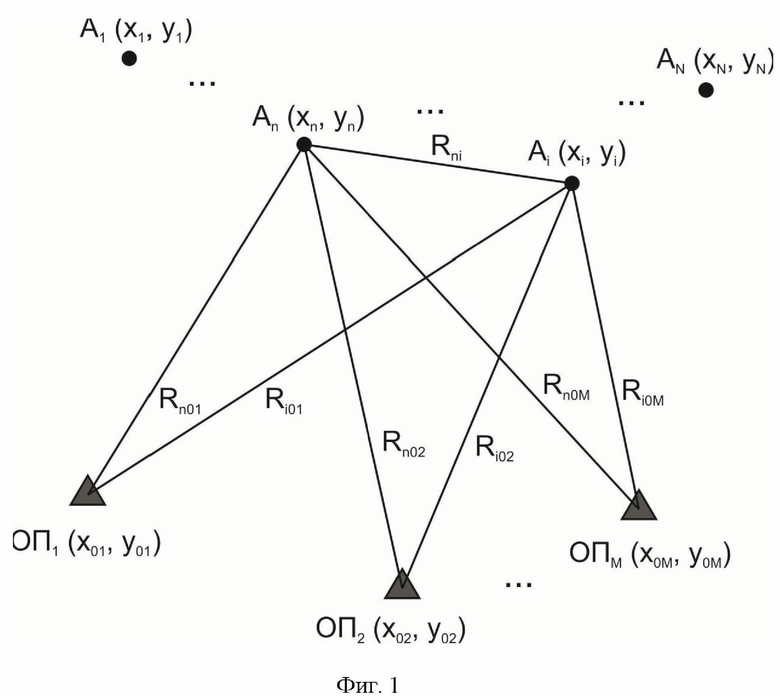
Способ мониторинга пространственно-временного состояния группы подвижных объектов при локальной навигации, основанный на взаимодействии N равноправных одинаковых по техническому оснащению подвижных объектов группы, в состав которых входят технические средства: устройство сбора данных и расчета координат, дисплей, штатная радиостанция, штатная гарнитура, блок управления мониторингом, и M разнесенных в пространстве опорных приемопередатчиков с известными локальными координатами, и обеспечивающий взаимную осведомленность каждого подвижного объекта о пространственно-временном состоянии всех подвижных объектов группы путем определения собственных локальных координат подвижного объекта на основании значений интервалов времени, пропорциональных расстояниям между подвижным объектом и опорными приемопередатчиками, измеренных подвижным объектом запросным способом, и определения подвижным объектом локальных координат других подвижных объектов группы на основании измеренных значений интервалов времени между запросными сигналами других подвижных объектов и ответными сигналами опорных приемопередатчиков на запросы других подвижных объектов, принятыми техническими средствами подвижного объекта, с использованием информации о собственных локальных координатах подвижного объекта, при этом расчет локальных координат самого подвижного объекта и локальных координат других подвижных объектов группы осуществляется в устройстве сбора данных и расчета координат подвижного объекта путем решения систем линейных уравнений, связывающих искомые координаты подвижного объекта, координаты опорных приемопередатчиков, и измеренные значения временных интервалов, с дальнейшим отображением рассчитанных локальных координат подвижных объектов на экране дисплея в виде отметок на фоне карты местности.
| СПОСОБ ДИНАМИЧЕСКОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ МОБИЛЬНЫХ ОБЪЕКТОВ | 2016 |
|
RU2624790C1 |
| RU 2784109 C1, 23.11.2022 | |||
| СИСТЕМА ТОЧНОЙ НАВИГАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ С ИСПОЛЬЗОВАНИЕМ ДАННЫХ НАЗЕМНОЙ ИНФРАСТРУКТУРЫ ГЛОНАСС | 2015 |
|
RU2582595C1 |
| Защитный состав для обработки древесины | 1988 |
|
SU1708150A3 |
| US 20190200188, 27.06.2019. | |||

