Изобретение относится к области локальной радионавигации и радиосвязи и направлено на обеспечение ситуационной осведомленности группы подвижных объектов.
Под ситуационной осведомленностью понимается взаимная осведомленность каждого подвижного объекта о пространственно-временном состоянии всех подвижных объектов группы.
Известен способ мониторинга пространственно-временного состояния группы подвижных объектов при локальной навигации [1], основанный на взаимодействии одинаковых по техническому оснащению управляющего подвижного объекта группы и управляемых подвижных объектов группы и четырех разнесенных в пространстве опорных приемопередатчиков, с известными локальными координатами, и обеспечивающий взаимную осведомленность каждого подвижного объекта о пространственно-временном состоянии всех подвижных объектов группы путем определения собственных локальных координат подвижного объекта на основании значений интервалов времени, пропорциональных расстояниям между подвижным объектом и опорными приемопередатчиками, измеренных подвижным объектом запросным способом, и предоставления возможности другим подвижным объектам группы определения его локальных координат путем передачи им измеренных значений интервалов времени, пропорциональных расстояниям между подвижным объектом и опорными приемопередатчиками.
Недостатком данного способа является то, что для определения координат подвижных объектов необходимо использовать четыре разнесенных в пространстве опорных приемопередатчика, а для взаимной осведомленности о координатах всех подвижных объектов группы необходимо организовать обмен информацией между объектами группы об измеренных значениях интервалов времени, пропорциональных расстояниям между подвижными объектами и опорными приемопередатчиками.
Наиболее близким к предлагаемому изобретению является способ мониторинга пространственно-временного состояния группы подвижных объектов при локальной навигации [2], не требующий организации дополнительного обмена информацией между объектами группы, основанный на взаимодействии N равноправных одинаковых по техническому оснащению подвижных объектов группы, в состав которых входят технические средства: устройство сбора данных и расчета координат, дисплей, штатная радиостанция, штатная гарнитура, блок управления мониторингом, и M разнесенных в пространстве опорных приемопередатчиков с известными локальными координатами, и обеспечивающий взаимную осведомленность каждого подвижного объекта о пространственно-временном состоянии всех подвижных объектов группы путем определения собственных локальных координат подвижного объекта на основании значений интервалов времени, пропорциональных расстояниям между подвижным объектом и опорными приемопередатчиками, измеренных подвижным объектом запросным способом, и определения подвижным объектом локальных координат других подвижных объектов группы на основании измеренных значений интервалов времени между запросными сигналами других подвижных объектов и ответными сигналами опорных приемопередатчиков на запросы других подвижных объектов, принятыми техническими средствами подвижного объекта, с использованием информации о собственных локальных координатах подвижного объекта.
Недостатком данного способа является то, что для определения координат подвижных объектов необходимо использовать М разнесенных в пространстве опорных приемопередатчиков.
Целью (техническим результатом) изобретения является обеспечение мониторинга пространственно-временного состояния группы подвижных объектов о пространственно-временном состоянии всех подвижных объектов группы с использованием одной опорной навигационной станции (ОНС) с известными локальными координатами.
Технический результат изобретения достигается тем, что в состав ОНС, оборудованной приемопередатчиком, дополнительно включается радиопеленгатор, обеспечивающий измерение пеленга подвижного объекта относительно ОНС при приеме сигнала запроса дальности, сформированного радиостанцией подвижного объекта, и передачу измеренного значения пеленга в приемопередатчик, который включает значение пеленга в состав сигнала ответа дальности для подвижного объекта, при этом определение собственных локальных координат подвижным объектом осуществляется угломерно-дальномерным способом, а определение подвижным объектом локальных координат других подвижных объектов группы осуществляется угломерно-разностно-дальномерным способом, с использованием дополнительной информации о значении пеленгов подвижных объектов, извлекаемых из сигналов ответа дальности, принятых радиостанцией подвижного объекта.
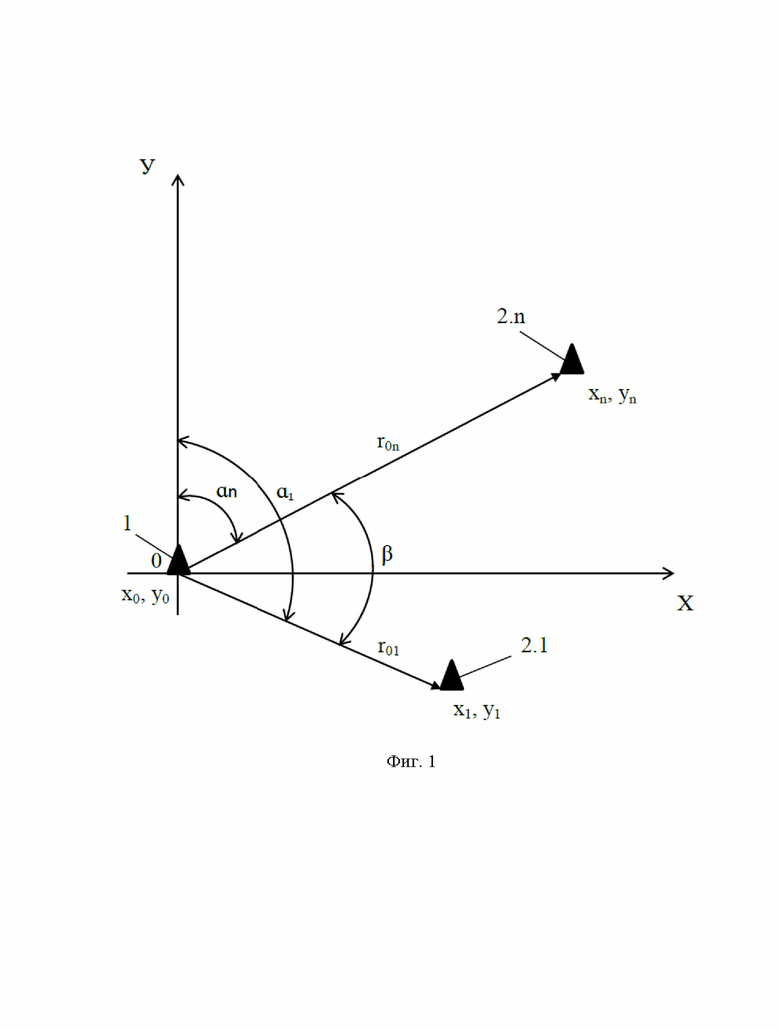
Сущность изобретения поясняется рисунками, где на фиг. 1 - 4 показаны схемы взаимодействия подвижных объектов и ОНС в процессе мониторинга пространственно-временного состояния подвижных объектов группы, на фиг. 5 показана структурная схема технических средств ОНС, а на фиг. 6 показана структурная схема технических средств подвижного объекта.
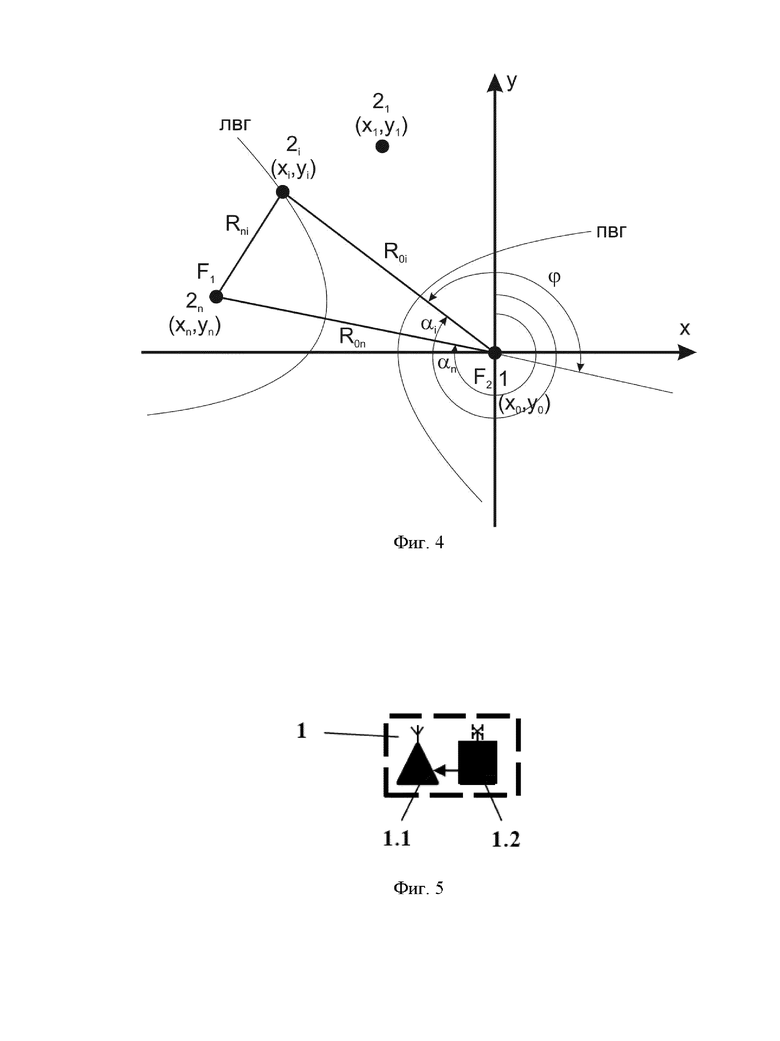
Способ мониторинга пространственно-временного состояния группы подвижных объектов реализуется группой из N равноправных подвижных объектов 2n, n=1, …, N, в состав которых входят штатное оборудование состоящее из штатной радиостанции 2.1n, штатная гарнитура 2.2n, и дополнительное оборудование, состоящее из блока управления мониторингом 2.3n, устройства сбора данных и расчета координат 2.4n, дисплея 2.5n, взаимодействующих с ОНС 1, состоящая из приемопередатчика 1.1 и радиопеленгатора 1.2, с известными координатами x0, y0.
Способ мониторинга пространственно-временного состояния группы подвижных объектов осуществляется следующим образом.
Первоначально каждый подвижный объект 2n, n=1, …, N, определяет собственные координаты (xn, yn), для чего при нажатии на тангенту гарнитуры 2.2n при переводе штатной радиостанции 2.1n в режим «Передача» с помощью блока управления мониторингом 2.3n формируется кодограмма «Запрос дальности» (ЗДn) содержащая уникальный идентификационный номер, которая через штатную радиостанцию 2.1n передается на ОНС 1 с фиксацией времени ее передачи tЗДn в блоке управления мониторингом 2.3n.
На ОНС 1 кодограмма ЗДn принимается приемопередатчиком 1.1 и радиопеленгатором 1.2. В приемопередатчике 1.1 кодограмма декодируется, устанавливается ее принадлежность n-му подвижному объекту 2 и формируется сигнал «Ответ дальности» для n-го подвижного объекта 2. Одновременно радиопеленгатор 1.2 определяет пеленг (азимутальный угол) αn на n-ый подвижный объект 2, излучивший сигнал «Запрос дальности» ЗДn, и передает его значение в приемопередатчик 1.1. Приемопередатчик 1.1 для n-го подвижного объекта 2 формирует кодограмму «Ответ дальности + угол» (ОДУn) путем включения значение пеленга в состав сигнала «Ответ дальности» для n-го подвижного объекта 2 и передает сформированную кодограмму ОДУn на n-ый подвижный объект 2.
Подвижный объект 2n принимает кодограмму ОДУn радиостанцией 2.1n и передает ее в блок управления мониторингом 2.3n, где фиксируется время их приема tОДn, измеряется задержка Δtn=tОДn-tЗДn и извлекается значение азимутального угла αn из принятой кодограммы ОДУn. Измеренная задержка Δtn и полученное значение азимутального угла αn передаются в устройство сбора данных и расчета координат 2.4n, для расчета собственных координат (xn, yn) подвижного объекта An угломерно-дальномерным методом
xn=x0+Rn sin αn,
yn=y0+Rn cos αn,
где x0 и y0 координаты ОНС, Rn=VcΔtn/2, Vc - скорость распространения радиоволны, равная скорости света.
Определение подвижным объектом 2n, n=1, …, N, координат (xi, yi) другого подвижного объекта группы 2i, i=1, …, N, i ≠ n, осуществляется следующим образом. В процессе определения собственных координат подвижный объект Ai, формирует и излучает кодограмму «Запрос дальности» (ЗДi) на ОНС 1. Излученная кодограмма ЗДi принимается ОНС 1 и подвижным объектом 2n.
На подвижном объекте 2n кодограмма ЗДi принимается штатной радиостанцией 2.1n и передается в блок управления мониторингом 2.3n с фиксацией времени ее приема tЗДni и идентификацией запрашивающего объекта как 2i.
На ОНС 1 кодограмма ЗДi принимается приемопередатчиком 1.1 и радиопеленгатором 1.2. В приемопередатчике 1.1 кодограмма декодируется, устанавливается ее принадлежность i-му подвижному объекту 2 и формируется сигнал «Ответ дальности» для i-го подвижного объекта 2. Одновременно радиопеленгатор 1.2 определяет пеленг (азимутальный угол) αi на i-ый подвижный объект 2, излучивший сигнал «Запрос дальности» ЗДi, и передает его значение в приемопередатчик 1.1. Приемопередатчик 1.1 для i-го подвижного объекта 2 формирует кодограмму «Ответ дальности + угол» (ОДУi) путем включения значение пеленга в состав сигнала «Ответ дальности» для i-го подвижного объекта 2 и передает сформированную кодограмму ОДУi на i-ый подвижный объект 2.
Излученная кодограмма ОДУi принимается i-ым подвижным объектом 2i и n-ым подвижным объектом 2n.
В n-ом подвижном объекте 2 кодограмма ОДУi принимается радиостанцией 2.1n и передается в блок управления мониторингом 2.3n, где она идентифицируется как «Ответ дальности + угол» для запрашивающего объекта 2i, фиксируется время ее приема tОДni, измеряется задержка Δtni=tОДni-tЗДni и извлекается значение азимутального угла αi из принятой кодограммы ОДУi. Измеренная задержка Δtni и полученное значение азимутального угла αi передаются в устройство сбора данных и расчета координат 2.4n, для расчета координат (xi, yi) подвижного объекта 2i угломерно-разностно-дальномерным методом для чего:
1) составляется уравнение

где 



2) полученное уравнение преобразуется путем переноса известного значения 

3) преобразованное уравнение представляет собой уравнение гиперболы, которой принадлежит точка расположения подвижного объекта 2i.
Если xn>x0, то фокус F1 этой гиперболы находится в точке расположения ОНС 1, а фокус F2 - в точке расположения подвижного объекта 2n.
Если xn<x0, то наоборот, фокус F2 этой гиперболы находится в точке расположения ОНС 1, а фокус F1 - в точке расположения подвижного объекта 2n.
4) определяются основные параметры a, b, c, ρ и эксцентриситет ε этой гиперболы [3]:

при этом если a>0, то подвижный объект 2i принадлежит правой ветви гиперболы, если a<0, то подвижный объект 2i принадлежит левой ветви гиперболы;




5) определяется неизвестное расстояния между подвижным объектом 2i и ОНС 1
а) если точка расположения ОНС 1 является фокусом F1 гиперболы:
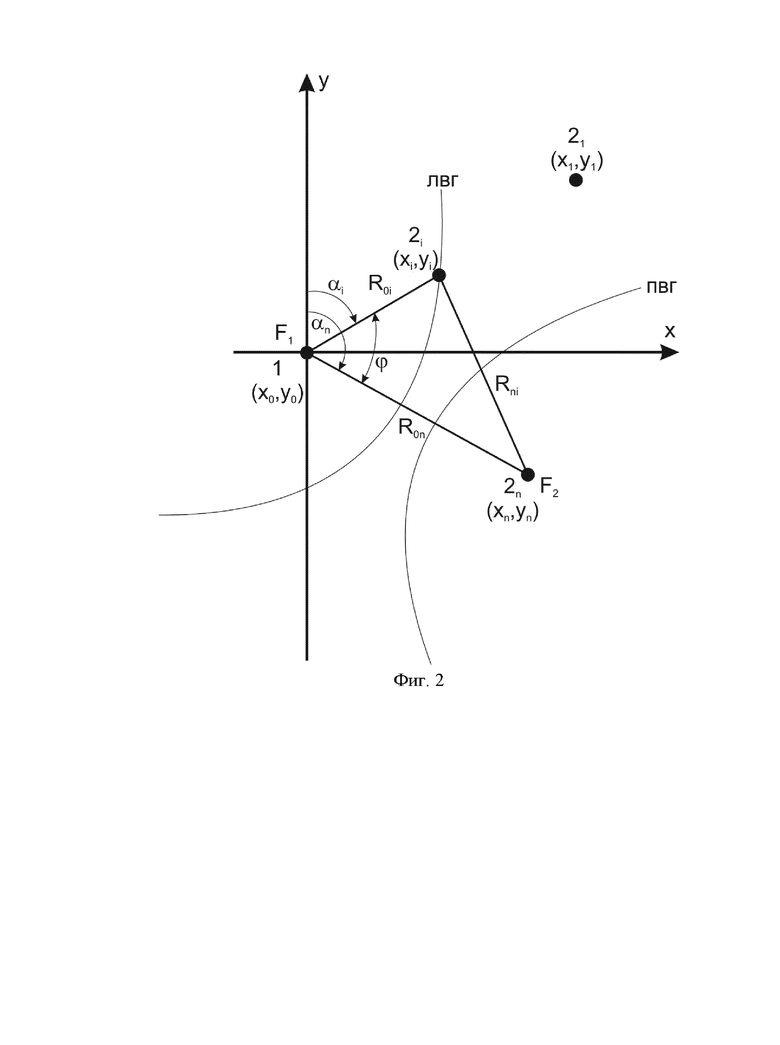
- при a>0, когда подвижный объект 2i принадлежит правой ветви гиперболы (фиг. 1):

- при a<0, когда подвижный объект 2i принадлежит левой ветви гиперболы (фиг. 2)
б) если точка расположения ОНС 1 является фокусом F2 гиперболы:
- при a>0, когда подвижный объект 2i принадлежит правой ветви гиперболы (фиг. 3):

- при a<0, когда подвижный объект 2i принадлежит левой ветви гиперболы (фиг. 4)


6) определяются координаты (xi, yi) подвижного объекта 2i:


Рассчитанные устройством сбора и расчета координат 2.4n собственные координаты (xn, yn) подвижного объекта An, а также координаты (xi, yi) других подвижных объектов 2i группы выводятся на экране дисплея 2.5n в виде отметок на фоне карты местности.
Таким образом обеспечивается взаимная осведомленность каждого подвижного объекта группы о своем пространственно-временном состоянии и о пространственно-временном состоянии всех остальных подвижных объектов группы с использованием одной опорной навигационной станции с известными локальными координатами. При этом между подвижными объектами группы не требуется дополнительный обмен информацией, которая могла бы быть несанкционированно использована для организации деструктивного воздействия на подвижные объекты.
Источники информации:
1. Патент №2784103 РФ, МПК G01S5/02 G01S11/02 G01C21/00. Способ мониторинга пространственно-временного состояния группы подвижных объектов при локальной навигации / И.В. Шуваев (РФ) и др.; Акционерное общество научно-производственное предприятие «ПРОТЕК» (РФ). - № 2022115586; заявлено 09. 06.2022, опубл. 23.11.2022, бюл. № 33. - 10 с., 1 ил.
2. Патент №2790808 РФ, МПК G01S 15/06. Способ мониторинга пространственно-временного состояния группы подвижных объектов при локальной навигации / И.В. Шуваев (РФ) и др.; Акционерное общество научно-производственное предприятие «ПРОТЕК» (РФ). - № 2022117238; заявлено 27. 06.2022, опубл. 28.02.2023, бюл. № 7. - 11 с., 1 ил.
3. Г. Корн, Т. Корн Справочник по математике для научных работников и инженеров. Перевод с со второго американского переработанного издания. Под общ. ред. И.Г. Арамановича. Издательство «Наука». Главная редакция физико-математической литературы. М. 1974.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ локальной радионавигации подвижного объекта | 2023 |
|
RU2802050C1 |
| Способ мониторинга пространственно-временного состояния группы подвижных объектов при локальной навигации | 2022 |
|
RU2790808C1 |
| ПРОСТРАНСТВЕННО-РАСПРЕДЕЛЕННЫЙ КОМПЛЕКС СРЕДСТВ СОЗДАНИЯ РАДИОПОМЕХ | 2014 |
|
RU2563972C1 |
| Пространственно-распределительный комплекс создания радиопомех навигационной аппаратуре потребителей глобальных навигационных систем с многофункциональным использованием радиоэлектронного оборудования | 2015 |
|
RU2616286C1 |
| Станция радиоподавления приемной аппаратуры спутников-ретрансляторов низкоорбитальной системы спутниковой связи | 2018 |
|
RU2695810C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ СОСТОЯНИЯ ОХРАНЯЕМОГО ОБЪЕКТА | 2011 |
|
RU2469408C1 |
| Способ определения плановых координат воздушного судна по измерениям пеленга неизвестного источника помехового излучения | 2021 |
|
RU2771439C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ ОХРАНЯЕМОГО ОБЪЕКТА | 2008 |
|
RU2370824C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ СОСТОЯНИЯ ОХРАНЯЕМОГО ОБЪЕКТА | 2009 |
|
RU2419162C1 |
| СПОСОБ ЛЕТНЫХ ПРОВЕРОК НАЗЕМНЫХ СРЕДСТВ РАДИОТЕХНИЧЕСКОГО ОБЕСПЕЧЕНИЯ ПОЛЕТОВ И УСТРОЙСТВА ДЛЯ ЕГО ПРИМЕНЕНИЯ | 2011 |
|
RU2501031C2 |


Изобретение относится к области локальной радионавигации и радиосвязи и направлено на обеспечение ситуационной осведомленности группы подвижных объектов. Предлагаемый способ мониторинга пространственно-временного состояния группы подвижных объектов основан на взаимодействии N равноправных одинаковых по техническому оснащению подвижных объектов группы, в состав которых входят технические средства: устройство сбора данных и расчета координат, дисплей, штатная радиостанция, штатная гарнитура, блок управления мониторингом, и опорная навигационная станция (ОНС), оборудованной приемопередатчиком с известными локальными координатами. Способ обеспечивает взаимную осведомленность каждого подвижного объекта о пространственно-временном состоянии всех подвижных объектов группы путем определения собственных локальных координат подвижного объекта на основании значения интервала времени, пропорционального расстоянию между подвижным объектом и ОНС, измеренного подвижным объектом запросным способом, и определения подвижным объектом локальных координат других подвижных объектов группы на основании измеренных значений интервалов времени между запросными сигналами других подвижных объектов и ответными сигналами ОНС на запросы других подвижных объектов, принятыми техническими средствами подвижного объекта, с использованием информации о собственных локальных координатах подвижного объекта. При этом в состав ОНС дополнительно включается радиопеленгатор, обеспечивающий измерение пеленга подвижного объекта относительно ОНС при приеме сигнала запроса дальности, сформированного радиостанцией подвижного объекта, и передачу измеренного значения пеленга в приемопередатчик, который включает значение пеленга в состав сигнала ответа дальности для подвижного объекта. Технический результат - обеспечение мониторинга пространственно-временного состояния группы подвижных объектов с использованием одной ОНС с известными локальными координатами. 6 ил.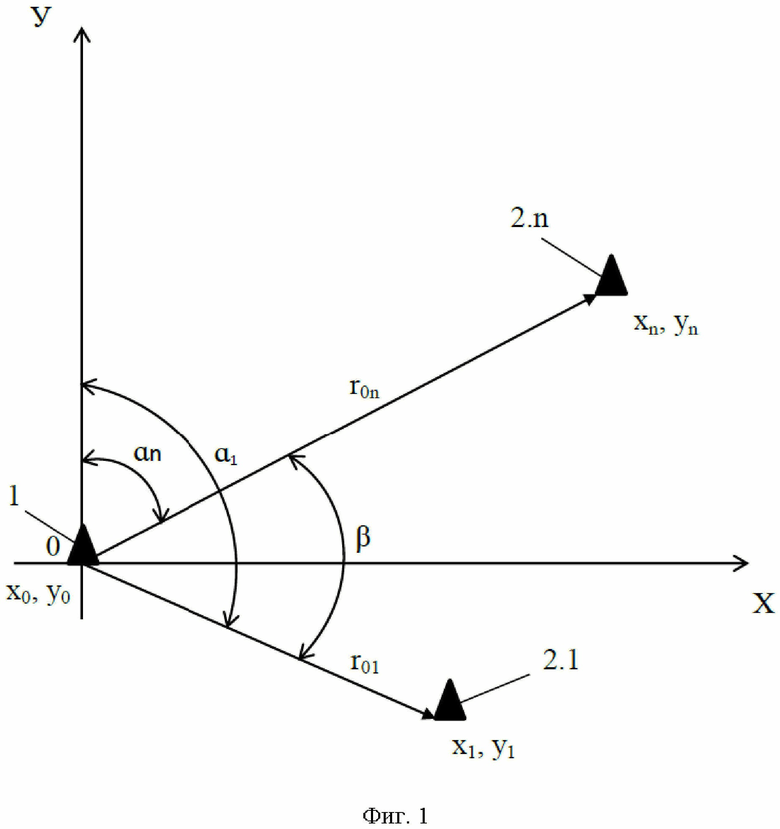
Способ мониторинга пространственно-временного состояния группы подвижных объектов, основанный на взаимодействии N равноправных одинаковых по техническому оснащению подвижных объектов группы, в состав которых входят технические средства: устройство сбора данных и расчета координат, дисплей, штатная радиостанция, штатная гарнитура, блок управления мониторингом и опорной навигационной станцией (ОНС), оборудованной приемопередатчиком с известными локальными координатами; и обеспечивающий взаимную осведомленность каждого подвижного объекта о пространственно-временном состоянии всех подвижных объектов группы путем определения собственных локальных координат подвижного объекта на основании значения интервала времени, пропорционального расстоянию между подвижным объектом и ОНС, измеренного подвижным объектом запросным способом, и определения подвижным объектом локальных координат других подвижных объектов группы на основании измеренных значений интервалов времени между запросными сигналами других подвижных объектов и ответными сигналами ОНС на запросы других подвижных объектов, принятыми техническими средствами подвижного объекта, с использованием информации о собственных локальных координатах подвижного объекта, отличающийся тем, что в состав ОНС дополнительно включается радиопеленгатор, обеспечивающий измерение пеленга подвижного объекта относительно ОНС при приеме сигнала запроса дальности, сформированного радиостанцией подвижного объекта, и передачу измеренного значения пеленга в приемопередатчик, который включает значение пеленга в состав сигнала ответа дальности для подвижного объекта, при этом определение собственных локальных координат подвижным объектом осуществляется угломерно-дальномерным способом, а определение подвижным объектом локальных координат других подвижных объектов группы осуществляется угломерно-разностно-дальномерным способом, с использованием дополнительной информации о значении пеленгов подвижных объектов, извлекаемых из сигналов ответа дальности, принятых радиостанцией подвижного объекта.
| СПОСОБ ОБЕСПЕЧЕНИЯ УКАЗАНИЯ ВРЕМЕНИ И ПОЛОЖЕНИЯ С ПРОВЕРКОЙ ПОДЛИНОСТИ | 2011 |
|
RU2531384C2 |
| СПОСОБ И СИСТЕМА ПОЗИЦИОНИРОВАНИЯ МОБИЛЬНОГО ТЕРМИНАЛА ВНУТРИ ЗДАНИЙ НА ОСНОВЕ ГЛОНАСС-ПОДОБНОГО СИГНАЛА | 2012 |
|
RU2533202C2 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2004 |
|
RU2263328C1 |
| Угломерно-корреляционный способ определения местоположения наземных источников радиоизлучения | 2021 |
|
RU2764149C1 |
| Автомобиль-сани, движущиеся на полозьях посредством устанавливающихся по высоте колес с шинами | 1924 |
|
SU2017A1 |
