Изобретение относится к области локальной радионавигации и радиосвязи и направлено на получение оценок пространственно-временного состояния подвижного объекта.
Известен способ определения координат источника радиоизлучения [1], находящегося на передающем радиосигналы объекте, в том числе подвижном, при этом радиосигналы принимают системой, содержащей совокупность N упорядоченно пронумерованных наземных станций с заданными в трехмерной декартовой системе координатами фазовых центров их антенн.
Недостатком данной системы является то, что в способе задействована совокупность N упорядоченно пронумерованных наземных станций, которые определяют координаты источника радиоизлучения, а не объект, на котором расположен источник радиоизлучения, определяет свои координаты.
Наиболее близким к предлагаемому изобретению является способ мониторинга пространственно-временного состояния группы подвижных объектов при локальной навигации [2], осуществляемый подвижным объектом, в состав которого входит устройство сбора данных и расчета координат, дисплей и штатная радиостанция с блоком управления мониторингом, и обеспечивающий мониторинг своего пространственного состояния, с помощью четырех разнесенных в пространстве опорных приемопередатчиков, с известными локальными координатами, путем определения собственных локальных координат дальномерным или разностно-дальномерным методом на основании значений расстояний между подвижным объектом и опорными приемопередатчиками, измеренных подвижным объектом запросным способом.
Недостатком данного способа является то, что для определения собственных координат подвижному объекту необходимо использовать четыре разнесенных в пространстве опорных приемопередатчика.
Целью (техническим результатом) изобретения является определение координат подвижного объекта с использованием одной опорной навигационной станции (ОНС) с известными локальными координатами запросным методом путем асинхронного радиообмена между подвижным объектом и ОНС.
Технический результат изобретения достигается тем, что в состав ОНС, оборудованной приемопередатчиком, дополнительно включается радиопеленгатор, обеспечивающий измерение пеленга подвижного объекта относительно ОНС при приеме сигнала запроса дальности, сформированного радиостанцией подвижного объекта, и передачу измеренного значения пеленга в приемопередатчик, который включает значение пеленга в состав сигнала ответа дальности для подвижного объекта, а определение собственных локальных координат подвижным объектом осуществляется угломерно-дальномерным способом с использованием дополнительной информации о значении пеленга подвижного объекта, извлекаемой из сигнала ответа дальности, принятого радиостанцией подвижного объекта.
На фиг.1 показана схема взаимодействия подвижного объекта 1 и опорной навигационной станции 2 в процессе мониторинга пространственно-временного состояния подвижного объекта.
Способ локальной радионавигации подвижного объекта осуществляется следующим образом.
Подвижный объект 1, с использованием блока управления мониторингом 1.2, формирует кодограмму «Запрос дальности» (ЗД) содержащую уникальный идентификационный номер подвижного объекта 1, которая через радиостанцию 1.1 передается на опорную навигационную станцию 2, с фиксацией времени ее передачи tЗД в блоке управления мониторингом 1.2.
На опорной навигационной станции 2 кодограмма «Запрос дальности» принимается приемопередатчиком 2.1 и радиопеленгатором 2.2. В приемопередатчике 2.1 кодограмма ЗД декодируется, устанавливается ее принадлежность подвижному объекту 2 и формируется сигнал «Ответ дальности» для подвижного объекта 1. Одновременно радиопеленгатор 2.2 определяет пеленг (азимутальный угол) α на подвижный объект 1, излучивший сигнал ЗД, и передает его значение в приемопередатчик 2.1. Приемопередатчик 2.1 формирует кодограмму «Ответ дальности + угол» (ОДУ) путем включения значение пеленга в состав сигнала «Ответ дальности» для подвижного объекта 1 и передает сформированную кодограмму ОДУ на подвижный объект 1.
Подвижный объект 1 принимает кодограмму ОДУ радиостанцией 1.1 и передает ее в блок управления мониторингом 1.2, где фиксирует время ее приема tОДУ, измеряет задержку ∆t=tОДУ-tЗД, и извлекает значение азимутального угла α из принятой кодограммы ОДУ.
Измеренное значение задержки Δt и полученное значение азимутального угла α передаются в устройство сбора данных и расчета координат 1.3 для расчета собственных координат (x, y) подвижного объекта 1.
Координаты подвижного объекта 1 в плоской прямоугольной системе координат XOY, ось абсцисс (OX) которой ориентирована в направлении на восток, а ось ординат (OY) - на север, происходит определение координат по формулам
x=x0+R sin α,
y=y0+R cos α,
где x0 и y0 координаты ОНС 2, R=VcΔt/2, Vc - скорость распространения радиоволны, равная скорости света.
Рассчитанные устройством сбора и расчета координат 1.3 собственные координаты (x, y) подвижного объекта 1 выводятся на экране дисплея 1.4 в виде отметок на фоне карты местности.
Источники информации
1. Патент №2617711 РФ, МПК G01S 5/04. Способ определения координат источника радиоизлучения / В.П. Панов (РФ); Общество с ограниченной ответственностью "НРТБ-Система" (ООО "НРТБ-С") (RU). №2016116872; заявлено 29.04.2016, опубл. 26.04.2017,бюл. №2.
2. Патент №2784103 РФ, МПК G01S5/02 G01S11/02 G01C21/00. Способ мониторинга пространственно-временного состояния группы подвижных объектов при локальной навигации / И.В. Шуваев (РФ) и др.; Акционерное общество научно-производственное предприятие «ПРОТЕК» (РФ). - №2022115586; заявлено 09. 06.2022, опубл. 23.11.2022, бюл. № 33. - 10 с., 1 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ мониторинга пространственно-временного состояния группы подвижных объектов | 2023 |
|
RU2809923C1 |
| Способ мониторинга пространственно-временного состояния группы подвижных объектов при локальной навигации | 2022 |
|
RU2790808C1 |
| Способ локальной радионавигации по сигналам несинхронизированных отечественных средств радиоэлектронного подавления глобальных навигационных спутниковых систем | 2021 |
|
RU2770127C1 |
| Помехоустойчивая дальномерная локальная радионавигационная система, обеспечивающая высокоточное позиционирование | 2022 |
|
RU2784802C1 |
| Способ навигации с использованием абонентского терминала и абонентский терминал | 2023 |
|
RU2837647C1 |
| СПОСОБ НАВИГАЦИИ ОБЪЕКТА С ИСПОЛЬЗОВАНИЕМ РАДИОТЕХНИЧЕСКОЙ ДАЛЬНОМЕРНОЙ СИСТЕМЫ | 2020 |
|
RU2770311C2 |
| Способ определения плановых координат воздушного судна по измерениям пеленга неизвестного источника помехового излучения | 2021 |
|
RU2771439C1 |
| Способ навигации с использованием радионавигационных опорных станций и опорная станция для его осуществления | 2023 |
|
RU2837598C1 |
| Навигационная аппаратура санкционированного потребителя с возможностью локальной навигации по сигналам несинхронизированных отечественных средств радиоэлектронного подавления глобальных навигационных спутниковых систем | 2021 |
|
RU2771435C1 |
| СПОСОБ ЛЕТНЫХ ПРОВЕРОК НАЗЕМНЫХ СРЕДСТВ РАДИОТЕХНИЧЕСКОГО ОБЕСПЕЧЕНИЯ ПОЛЕТОВ И УСТРОЙСТВА ДЛЯ ЕГО ПРИМЕНЕНИЯ | 2011 |
|
RU2501031C2 |

Изобретение относится к области локальной радионавигации и радиосвязи и направлено на получение оценок пространственно-временного состояния подвижного объекта. Техническим результатом изобретения является определение координат подвижного объекта с использованием одной опорной навигационной станции (ОНС) с известными локальными координатами запросным методом путем асинхронного радиообмена между подвижным объектом и ОНС. Заявляемый способ локальной радионавигации подвижного объекта основан на взаимодействии подвижного объекта, оборудованного радиостанцией, блоком управления мониторингом, устройством сбора данных и расчета координат и дисплеем, с ОНС с известными локальными координатами, оборудованной приемопередатчиком. Способ обеспечивает определение собственных локальных координат подвижного объекта с использованием значения интервала времени, пропорционального расстоянию между подвижным объектом и ОНС, измеренного подвижным объектом запросным способом. Дополнительно в состав ОНС включают радиопеленгатор, обеспечивающий измерение пеленга подвижного объекта относительно ОНС при приеме сигнала запроса дальности от подвижного объекта и передачу измеренного значения пеленга в приемопередатчик, который включает значение пеленга в состав сигнала ответа дальности для подвижного объекта. Определение собственных локальных координат подвижным объектом осуществляется угломерно-дальномерным способом с использованием дополнительной информации о значении пеленга подвижного объекта, извлекаемой из сигнала ответа дальности, принятого радиостанцией подвижного объекта. 1 ил.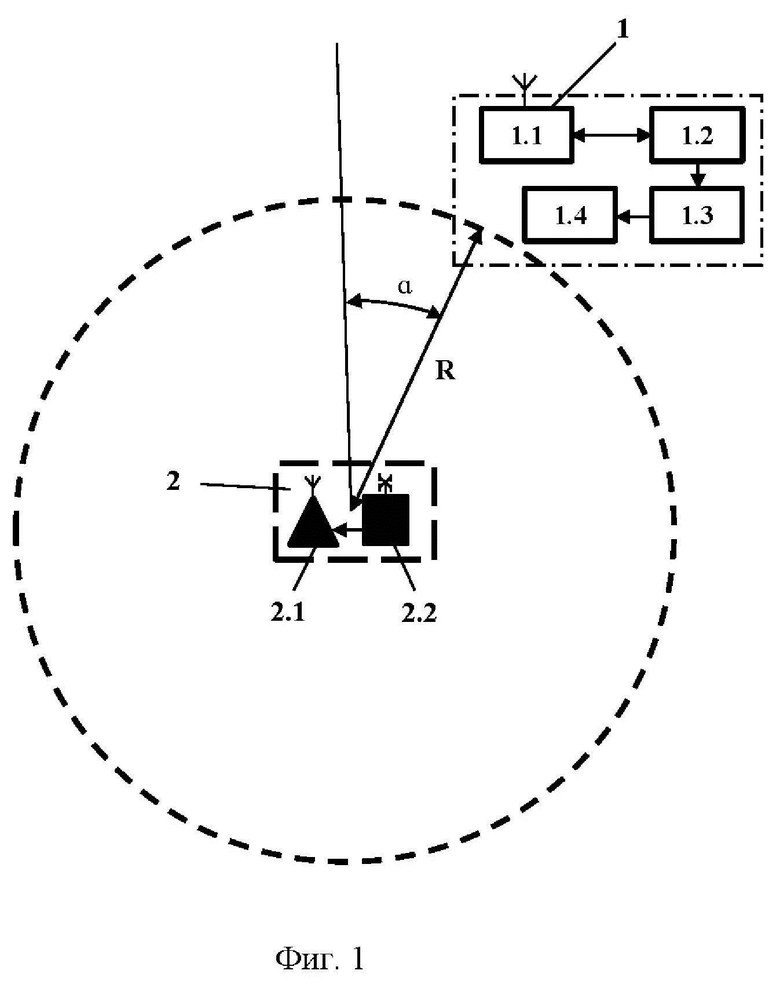
Способ локальной радионавигации подвижного объекта, основанный на взаимодействии подвижного объекта, оборудованного радиостанцией, блоком управления мониторингом, устройством сбора данных и расчета координат и дисплеем, с опорной навигационной станцией с известными локальными координатами, оборудованной приемопередатчиком, и обеспечивающий определение собственных локальных координат подвижного объекта с использованием значения интервала времени, пропорционального расстоянию между подвижным объектом и опорной навигационной станцией, измеренного подвижным объектом запросным способом, отличающийся тем, что в состав опорной навигационной станции дополнительно включается радиопеленгатор, обеспечивающий измерение пеленга подвижного объекта относительно опорной навигационной станции при приеме сигнала запроса дальности от подвижного объекта и передачу измеренного значения пеленга в приемопередатчик, который включает значение пеленга в состав сигнала ответа дальности для подвижного объекта, а определение собственных локальных координат подвижным объектом осуществляется угломерно-дальномерным способом с использованием дополнительной информации о значении пеленга подвижного объекта, извлекаемой из сигнала ответа дальности, принятого радиостанцией подвижного объекта.
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2016 |
|
RU2617711C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ ВЫСОКОТОЧНОГО ОДНОЭТАПНОГО ПЕЛЕНГАТОРА И АДРЕСНО-ОТВЕТНОЙ ПАКЕТНОЙ ЦИФРОВОЙ РАДИОЛИНИИ В ДКМВ ДИАПАЗОНЕ | 2016 |
|
RU2613369C1 |
| СПОСОБ КОНТРОЛЯ ДИСТАНЦИЙ МЕЖДУ ВЕДУЩИМ И ВЕДОМЫМ САМОЛЕТАМИ ПРИ ПОЛЕТЕ ПО МАРШРУТУ С ЭШЕЛОНИРОВАНИЕМ ПО ВЫСОТЕ | 2012 |
|
RU2510082C2 |
| Способ определения координат летательного аппарата относительно взлётно-посадочной полосы | 2016 |
|
RU2620587C1 |
| КИРЮШКИН В.В., ВОЛКОВ Н.С., МЕДВЕДЕВ А.М | |||
| Определение координат воздушного судна в полуактивной системе мультилатерации с синхронизацией приемных позиций по запросному сигналу // Радиолокация, навигация, связь | |||
| Сборник трудов XXV | |||
