Предлагаемое изобретение относится к радиолокации, а именно к способу определения местоположения наземных целей наземной пространственно распределенной радионавигационной системой (РНС), содержащей передатчики опорных станций РНС, наземный приемник, в которой для подсвета целей используются сигналы передатчиков РНС.
Радионавигационная система «передатчики - цели - приемник» решает задачу, связанную с объединением в приемнике информации, поступающей от нескольких передатчиков при радиолокационном наблюдении нескольких целей. Эта задача состоит в отождествлении измеряемых параметров с соответствующими целями и определении местоположения этих целей.
В радиолокации весьма обширный и важный класс лоцируемых объектов составляют источники радиоизлучений, наблюдение за которыми осуществляется приемниками, принимающими излучаемые радиосигналы. Широкое применение на практике нашли системы, базирующиеся на пеленгационных методах [1].
Одной из задач, решаемых при радиолокационном наблюдении, является задача отождествления пеленгов источников излучений, измеренных в различных приемных устройствах [2].
Известны также способы многопозиционной радиолокации [3, 4, 5].
Однако эти способы не предназначены для определения координат наземных целей в пространственно распределенной РНС.
Задачей предлагаемого способа является определение местоположения нескольких наземных целей радионавигационной системой по измерениям сумм расстояний от наземных целей до передатчиков опорной станции РНС и наземного приемника, координаты которых известны. При этом в наземном приемнике неизвестна информация о принадлежности измеренных расстояний той или иной наземной цели.
Поставленная задача решается следующим способом:
- передатчики опорных станций РНС с известными координатами (хn, yn), (n=1, 2, …, N) излучают навигационные сигналы, которые рассеиваются наземными целями с искомыми координатами хцm, уцm (m=1, 2, ..., М), наземный приемник с известными координатами (х0, у0), синхронизированный с передатчиками опорных станций РНС, по сигналам, рассеянным наземными целями, измеряет расстояния Rnm «n-й передатчик - m-я цель - приемник»;
- для обзора пространства возможного расположения целей задаются координаты виртуальной наземной цели хц(k), уц(k), k=1, 2, …, K;
- формируется L=K×NM систем уравнений из разностей между виртуальными и измеренными расстояниями «n-й передатчик - m-я цель - приемник»,

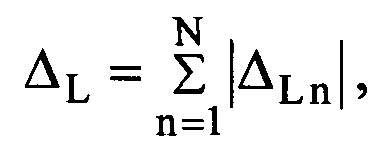
- формируются суммы модулей разностей
 L=l, 2, …, K×NM;
L=l, 2, …, K×NM;
- после расчета сумм модулей разностей ΔL координатами М наземных целей выбираются координаты, соответствующие М минимальным значениям этих сумм.
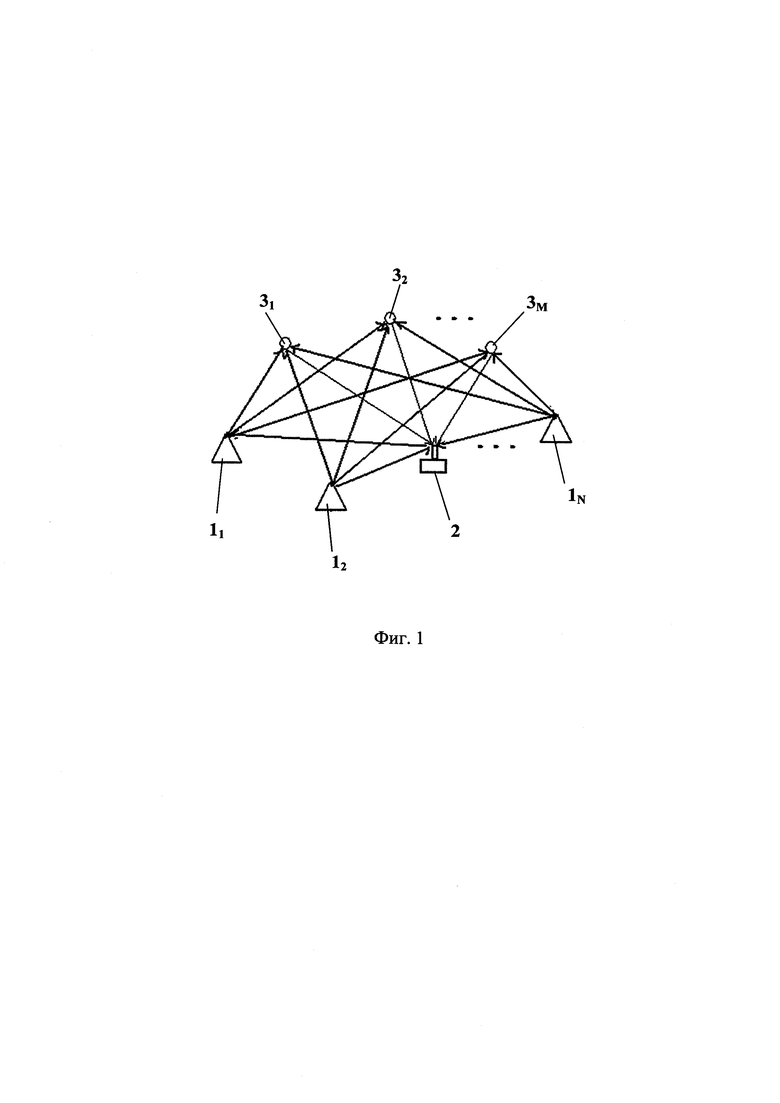
На Фиг. 1 приведена функциональная схема наземной пространственно распределенной РНС «передатчики - цели - приемник».
Наземная пространственно распределенная РНС состоит из наземных передатчиков опорных станций 11, 12, …, 1N с известными координатами (хn, уn), (n=1, 2, …, N) и наземного радиоприемника 2 с известными координатами (х0, у0).
Наземные передатчики опорных станций 11 12, …, 1N излучают навигационные сигналы, которые рассеиваются наземными целями 31, 32, …, 3М с искомыми координатами (хцm, уцm), (m=1, 2, …, М).
Наземный приемник 2 с известными координатами (х0, у0), синхронизированный с наземными передатчиками опорных станций 11, 12, …, 1N наряду с навигационными сигналами, распространяющимися вдоль прямого пути «n-й передатчик - приемник» принимает навигационные сигналы, рассеянные наземными целями 31, 32, …, 3М, находящимися в зоне действия наземной пространственно распределенной РНС.
При приеме слабого рассеянного навигационного сигнала осуществляется компенсация мощного навигационного сигнала прямого распространения, играющего роль структурно-детерминированной помехи. Для этого при приеме входной реализации в виде смеси мощного прямого навигационного сигнала и слабого навигационного сигнала, рассеянного целью, осуществляется процедура обнаружения мощного прямого сигнала, формируется точная копия этого сигнала и вычитается из записанной входной реализации [6].
Далее наземный приемник 2, синхронизированный с наземными передатчиками опорных станций 11, 12, …, 1N, измеряет расстояния Rnm, «n-й передатчик - m-я цель - приемник». Однако в наземном приемнике 2, неизвестно какой из m-ой наземной цели 31, 32, …, 3М принадлежит расстояние «n-й передатчик - m-я цель - приемник». Из-за этого возникает большое число возможных вариантов координат наземных целей 31, 32, …, 3М
В ходе процесса первичного отождествления результатов измерений в наземной пространственно распределенной РНС необходимо измерения расстояний, проведенные по навигационным сигналам, рассеянным наземными целями 31, 32, …, 3М и принятым в наземном приемнике 2, поставить в соответствие нужной наземной цели 31, 32, …, 3М и грубо определить ее координаты.
Способ первичного отождествления позиционных измерений и определения местоположения целей в наземной пространственно распределенной радионавигационной системе в условиях многоцелевой обстановки основан на виртуальном обзоре пространства возможного расположения наземных целей 31, 32, …, 3М по координатам х и у с шагом, соответствующим разрешающей способности наземной пространственно распределенной РНС. При этом на каждом k-ом шаге сканирования задаются предполагаемые координаты хц(k) и уц(k) виртуальной цели 31, 32, …, 3М.
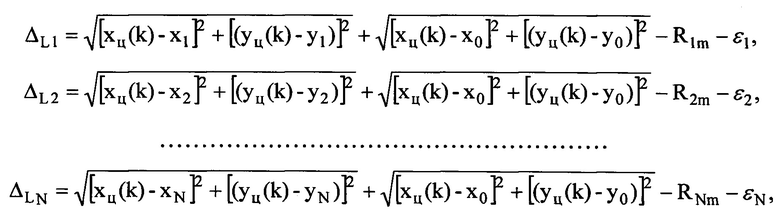
Координаты виртуальной цели хц(k) и уц(k) связываются с измеренными расстояниями Rnm вдоль трассы распространения «n-й передатчик - m-я цель - приемник» с помощью системы приближенных уравнений
где εn, n=1, 2, …, N - погрешность измерения расстояний.
Особенность этой системы состоит в том, что в наземном приемнике 2 неизвестно какой из m-ой наземной цели 31, 32, …, 3М принадлежит расстояние «n-й передатчик - m-я воздушная цель - приемник».
Из-за этого возникает большое число возможных вариантов систем уравнений, определяемое количеством K виртульных наземных целей и числом возможных переборов расстояний, равным NM. Вследствие этого число возможных вариантов систем уравнений для определения координат равно K×NM.
Для решения поставленной задачи сформулируем критерий принадлежности координат виртуальных целей соответствующим наблюдаемым целям 31, 32, …, 3М.
Перепишем уравнения системы (1) в виде разностей между левой и правой частями
Число L возможных вариантов систем (2) равно K×NM.
Для каждого варианта сформируем сумму модулей разностей
 L=1, 2, …, K×NM.
L=1, 2, …, K×NM.
Эта сумма будет иметь минимальное значение, когда координаты хц(k) и уц(k) виртуальной цели будут близки к координатам (хцm, уцm), истинной цели 3m и измеренные приемником 2 расстояния Rnm будут принадлежать этой цели.
То есть критерием наличия М целей в точках их возможного расположения (хц(k), уц(k)), будет М минимальных значений суммы  из всех L=K×NM возможных.
из всех L=K×NM возможных.
Таким образом, после расчета модулей разностей ΔL координатами М целей выбираются координаты, соответствующие М минимальным значениям этих модулей, при этом набор из М векторов, каждый из которых включает N измерений Rnm, обеспечивающий минимум ΔL, является результатом первичного отождествления позиционных измерений в наземной пространственно распределенной радионавигационной системе.
Литература
1. Черняк B.C. Многопозиционная радиолокация. - М.: Радио и связь, 1993, стр. 73-74, 392-396].
2. Радиоэлектронные системы: Основы построения и теория. Справочник. / Ширман Я.Д., Лосев Ю.И., Минервин Н.Н. и др. / Под ред. проф. Я.Д. Ширмана. - М.: ЗАО "Маквис", 1998, стр. 608].
3. Зайцев Д.В. Многопозиционные радиолокационные системы. М.: «Радиотехника», 2007, 96 с.
4. Патент 2332684 РФ, МПК G01S 10/00. Способ многопозиционной радиолокации и устройство для его осуществления / А.Л. Куликов (РФ); Куликов Александр Леонидович (РФ). - №2007102750; Заявлено 24.01.2007; Опубл. 27.08.2008, Бюл. 24. - 5 с.: 1 ил.
5. Патент 2584689 РФ, МПК G01S 13/74. Многопозиционная система определения воздушных судов / Г.Н. Майков, А.В. Демидюк, Е.В. Демидюк (РФ); Геннадий Николаевич Майков (РФ), Андрей Викторович Демидюк (РФ), Евгений Викторович Демидюк (РФ). - №2014145250; Заявлено 11.11.2014; Опубл. 20.05.2016, Бюл. 14. - 11 с.: 3 ил.
6. Патент 2591052 РФ, МПК G01S 5/06, G01S 13/95. Способ обнаружения и оценки радионавигационных параметров сигнала космической системы навигации, рассеянного воздушной целью, и устройство его реализации / В.В. Кирюшкин и др (РФ); Российская Федерация, от имени которой выступает Министерство обороны Российской Федерации (РФ), Федеральное государственное казенное образовательное учреждение высшего профессионального образования «Военный учебно-научный центр Военно-воздушных сил «Военно-воздушная академия имени профессора Н.Е. Жуковского и Ю.А. Гагарина « (г. Воронеж) Министерства обороны Российской Федерации (РФ). - №2014101847; Заявлено 21.01.2014; Опубл. 27.07.2015, Бюл. 19. - 12 с. 1 ил.
Изобретение относится к радиолокации, а именно к способу определения местоположения наземных целей наземной пространственно распределенной радионавигационной системой (РНС), содержащей передатчики опорных станций РНС, наземный приемник, в которой для подсвета целей используются сигналы передатчиков РНС. Достигаемый технический результат - определение местоположения нескольких наземных целей радионавигационной системой по измерениям сумм расстояний от наземных целей до передатчиков опорной станции РНС и наземного приемника, координаты которых известны. Указанный результат достигается за счет того, что передатчики опорных станций РНС с известными координатами излучают навигационные сигналы, которые рассеиваются наземными целями с искомыми координатами, наземный приемник с известными координатами, синхронизированный с передатчиками опорных станций РНС, по сигналам, рассеянным наземными целями, измеряет расстояния Rnm «n-й передатчик - m-я цель - приемник» для обзора пространства возможного расположения целей задаются координаты виртуальной наземной цели, формируются системы уравнений из разностей между виртуальными и измеренными расстояниями «n-й передатчик - m-я цель - приемник», формируются суммы модулей разностей, после расчета сумм модулей разностей ΔL координатами М наземных целей выбираются координаты, соответствующие М минимальным значениям этих сумм, при этом набор из М векторов, каждый из которых включает N измерений Rnm, обеспечивающий минимум ΔL, является результатом первичного отождествления позиционных измерений в наземной пространственно распределенной радионавигационной системе. 1 ил.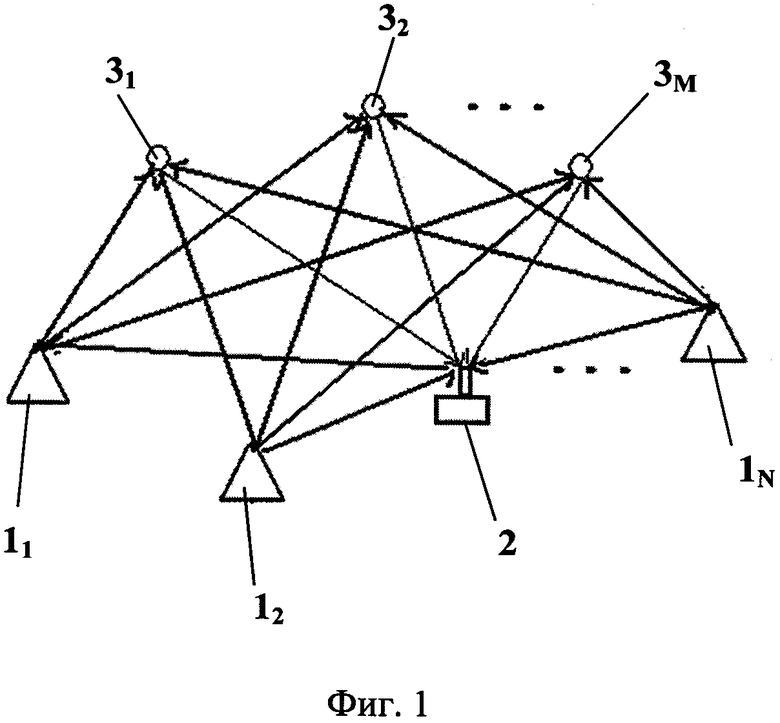
Способ первичного отождествления позиционных измерений и определения местоположения целей в наземной пространственно распределенной радионавигационной системе в условиях многоцелевой обстановки, осуществляющийся в следующей последовательности:
- передатчики опорных станций РНС с известными координатами (xn, yn), (n=1, 2, …, N) излучают навигационные сигналы, которые рассеиваются наземными целями с искомыми координатами хцm, уцm (m=1, 2, …, М), наземный приемник с известными координатами (х0, у0), синхронизированный с передатчиками опорных станций РНС, по сигналам, рассеянным наземными целями, измеряет расстояния Rnm, «n-й передатчик - m-я цель - приемник»;
- для обзора пространства возможного расположения целей задаются координаты виртуальной наземной цели хц(k), уц(k), k=1, 2, …, K;
- формируется L=K×NM систем уравнений из разностей между виртуальными и измеренными расстояниями «n-й передатчик - m-я цель - приемник»,
- формируются суммы модулей разностей
 L=1, 2, …, K×NM;
L=1, 2, …, K×NM;
- после расчета сумм модулей разностей ΔL координатами М наземных целей выбираются координаты, соответствующие М минимальным значениям этих сумм, при этом набор из М векторов, каждый из которых включает N измерений Rnm, обеспечивающий минимум ΔL, является результатом первичного отождествления позиционных измерений в наземной пространственно распределенной радионавигационной системе.
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ОБЪЕКТОВ В ПРОСТРАНСТВЕ, ДАЛЬНОСТИ, ПЕЛЕНГА, КООРДИНАТ МЕСТОПОЛОЖЕНИЯ И СОСТАВЛЯЮЩИХ ВЕКТОРА СКОРОСТИ ПО НАВИГАЦИОННЫМ РАДИОСИГНАЛАМ КОСМИЧЕСКИХ АППАРАТОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1998 |
|
RU2152625C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА ПРИ НАВИГАЦИОННЫХ ИЗМЕРЕНИЯХ | 2012 |
|
RU2529016C1 |
| СПОСОБ ОЦЕНИВАНИЯ ОШИБОК ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ И ЕЁ КОРРЕКЦИИ ПО ИЗМЕРЕНИЯМ СПУТНИКОВОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2015 |
|
RU2617565C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ОЦЕНКИ РАДИОНАВИГАЦИОННЫХ ПАРАМЕТРОВ СИГНАЛА КОСМИЧЕСКОЙ СИСТЕМЫ НАВИГАЦИИ, РАССЕЯННОГО ВОЗДУШНОЙ ЦЕЛЬЮ, И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2591052C2 |
| US 6727849 B1, 27.04.2004 | |||
| US 6900760 B2, 31.05.2005 | |||
| US 5646907 A, 08.07.1997. | |||

