Изобретение относится к области механики и может быть использовано в измерительной технике, исследовательских целях, военном деле и т.д. для практически мгновенного позиционирования подвижной платформы с установленным на ней позиционируемым аппаратом относительно основания, неподвижно закрепленного на движущемся объекте или носителе, в частности, при обнаружении и распознании заданного предмета в окружающем пространстве. При этом предполагается, что стоит задача осуществления некоторого физического взаимодействия установленного на платформе аппарата с обнаруженным предметом - фотосъемка, воздействие на него излучением, его поражение иными средствами, его идентификация, измерение его параметров и т.п., быстрого воздействия или взаимодействия в процессе относительного движения, которому должно предшествовать позиционирование платформы в течение доли секунды.
В US 2001015126 A1, F41A 27/08, 2001-08-23 описан механизм позиционирования мортиры, установленной на движущемся объекте, содержащий основание, привод в виде электродвигателя и платформу.
Из US 2004062541 A1, F16M 11/12, 2004-04-01 известен механизм позиционирования фотокамеры, в котором на основании установлен двухосный привод в виде колец с внутренними двигателями. Камера установлена на внутреннем кольце.
Недостатком обоих устройств является сравнительно большое время позиционирования, что делает невозможным их использование для решения вышеописанной задачи.
В технике широко распространены пиропатроны в качестве элементов быстрого развертывания преград или перемещения элементов конструкции. Так, в US 3702014 A, В63В 22/003, 1972-11-07 пиропатрон используется для выбрасывания маркерного буя, а в US2020189770A1, B64G1/222, 2020-06-18 управляемый контроллером набор пиропатронов используется для развертывания спутниковых антенн.
Также известно применение пороховых двигателей в качестве источника газов для рулевых систем управляемых снарядов (см., например, патент РФ 2106510 C1, F02K 9/00, 1995-09-12). Однако, в этих и подобных применениях не ставится задача точного и быстрого позиционирования, нацеливания некоторого аппарата на объект.
Наиболее близким к предложенному является поворотный механизм лазерного излучателя, который содержит основание в виде кожуха, включающего в себя нижнюю стенку и боковую стенку, соединенную с нижней стенкой, в котором размещено множество слоев вращающихся колец. Кольца вращения включают в себя верхнее кольцо для грубого ручного вращения, которое непосредственно соединено с лазерным излучателем и является платформой, автоматическое грубое кольцо вращения для вращения лазерного излучателя с относительно высокой скоростью, кольцо ручного точного вращения и кольцо автоматического точного вращения на относительно низкой скорости. Каждое автоматическое вращающееся кольцо снабжено приводным средством. Приводы позиционируют подвижную платформу, на которой установлен лазер и выполнены в виде двигателя постоянного тока и шагового двигателя соответственно. Работой приводов управляет процессор (см. US 2010001162 А1, F16M 11/08; 2010-01-07).
Недостатком данного механизма позиционирования является низкое быстродействие. Как отмечено в данном источнике, время позиционирования составляет не менее 3 с.
Техническим результатом, ожидаемым от использования изобретения, является повышение быстродействия механизма позиционирования.
Указанный результат достигается тем, что механизм позиционирования, содержащий основание, позиционируемую платформу с приводом и процессор с информационным входом и управляющим выходом, подключенным к приводу, снабжен средством слежения, при этом средство слежения и процессор выполнены с возможностью распознавания объектов в окружающем пространстве и регистрации вектора скорости этих объектов относительно основания, выход средства слежения соединен с информационным входом процессора, а привод выполнен в виде упругой опоры с возможностью углового перемещения во всем диапазоне позиционирования, кинематически соединенной с расположенными по ее периметру пиропатронами, контакты которых подключены к управляющему выходу процессора.
При этом пиропатроны могут быть выполнены ступенчатыми.
Поясним использованные выше понятия. Мы предполагаем, что основание может быть как неподвижным, так и закрепленным на покоящемся или движущемся объекте, в том числе, движущемся с высокой скоростью, причем в последнем случае преимущества предлагаемого механизма становятся особенно очевидными. Платформой мы называем собственно позиционируемый элемент конструкции (содержащий, например, втулку или обойму для крепления, каркас для размещения и т.п.), на котором неподвижно закреплен фотоаппарат, лазер или иной аппарат, механизм, взаимодействующий с или воздействующий на распознанный в окружающем пространстве предмет, так же неподвижный относительно Земли или движущийся, в том числе с высокой скоростью. Таким образом, в общем случае будем предполагать, что основание и предметы, которые механизм распознает и на которые нацеливает установленный на платформе аппарат, имеют высокую относительную скорость. И, наконец, под упругой опорой будем понимать один элемент (например, цилиндрический стержень) или совокупность элементов (шарнир, упругая втулка и ограничители), соединяющие основание и платформу, выполненные с возможностью углового перемещения в заданном диапазоне под действием двух сил или, точнее, вращающих моментов: центрирующего момента упругости (собственно опоры или одного из ее элементов) и отклоняющего момента, созданного приводом.
Также заметим, что, говоря о процессоре, мы имеем в виду не только единый элемент (процессор, контроллер, блок управления и т.п.), но и совокупность микропроцессоров, относящихся к средствам слежения, распознания, контроля дальности, расчета траектории и определения параметров движения, определения необходимого воздействия на упругую опору и связывающий их интерфейс.
Как отмечено выше, опора имеет возможность углового перемещения, за счет которого и осуществляется позиционирование установленной на опоре платформы. С этой целью опора либо закреплена на основании вторым (свободным от платформы) концом, либо размещена на оси, закрепленной в основании, которое может быть выполнено в виде платформы, короба с отверстием и т.п.
Либо собственно опора является упругой, либо опора выполняется (снабжается) с упругими элементами, либо то и другое вместе, так что при ее отклонении от центрального(начального) положения возникают силы, стремящиеся ее в это положение вернуть. При этом на опору могут воздействовать два момента: отклоняющий момент, созданный пиропатронами относительно ее основания или оси вращения и момент упругости, ему противодействующий и возрастающий по мере увеличения отклонения.
Кинематическое соединение пиропатронов с опорой означает, что либо толкатели пиропатронов касаются опоры в исходном состоянии, либо эти толкатели в момент срабатывания пиропатронов перемещаются до касания опоры по воздуху или по легко сминаемым направляющим, которые касаются опоры в исходном состоянии и не оказывают упругого воздействия на нее, либо эти направляющие являются полностью или частично теми упругими элементами, которые входят в состав опоры и создают возвращающий момент.
Из вышесказанного следует также, что точки приложения отклоняющих собственно опору сил со стороны толкателей пиропатронов и возвратных сил упругости со стороны упругих элементов (если собственно опора выполнена не упругой или ее упругости недостаточно) не совпадают с точкой крепления опоры или осью ее вращения, так как для создания вращающего момента необходимо ненулевое плечо.
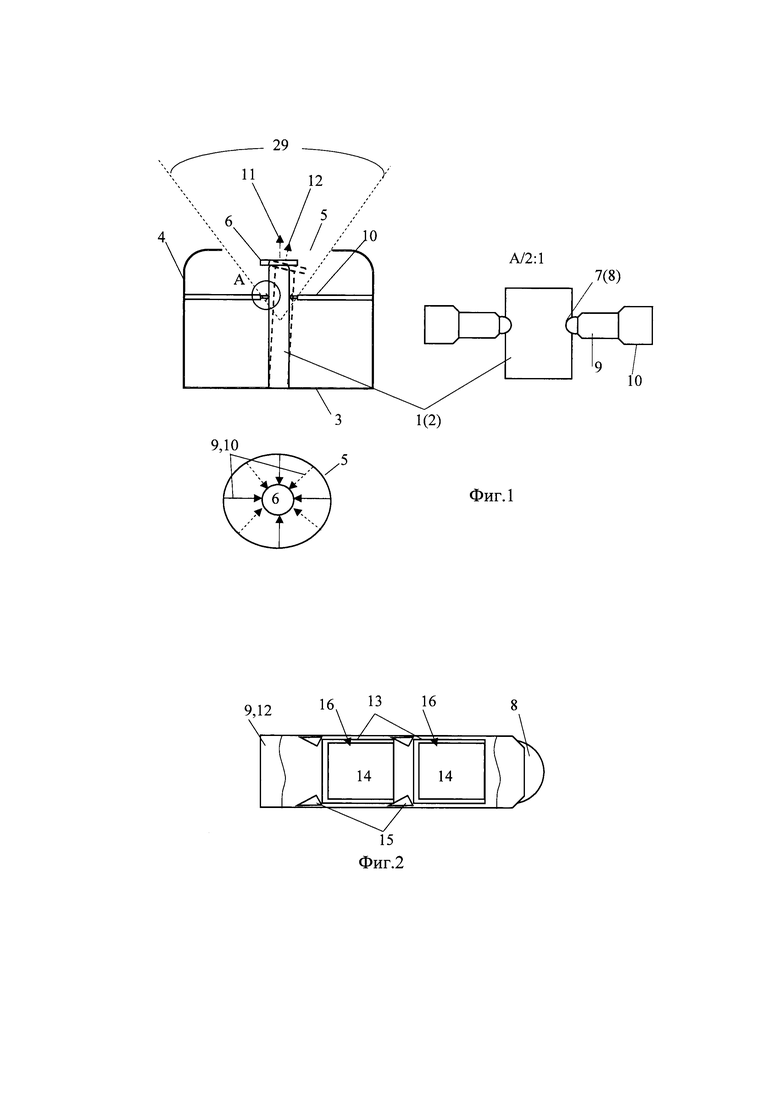
Существо изобретения поясняется рисунками. На фиг. 1 показан пример реализации упругой опоры в виде цилиндрического стержня. Опора 1 (фиг. 1) выполнена в виде упругого цилиндрического стержня 2 и одним концом закреплена на основании 3, выполненном в виде короба 4 с отверстием 5. На подвижном конце опоры 1 установлена платформа 6, на которой монтируется аппарат, позиционируемый относительно основания 3. На некотором удалении от основания 3 короба 4 в стержне 2 выполнены сферические углубления 7, в которых расположены сферические же толкатели 8 пиропатронов 9, закрепленных в соответствующих опорах 10. В результате при срабатывании левого пиропатрона 9 на фиг. 1 нормаль 11 к платформе 6 отклонится от исходного положения и займет положение 11'. Как показано на виде сверху (фиг. 1) пиропатроны 9 могут располагаться симметрично вокруг стержня 2 и их число может составлять 4,8 и т.д. в зависимости от секционирования пиропатронов 9 и необходимой точности позиционирования.
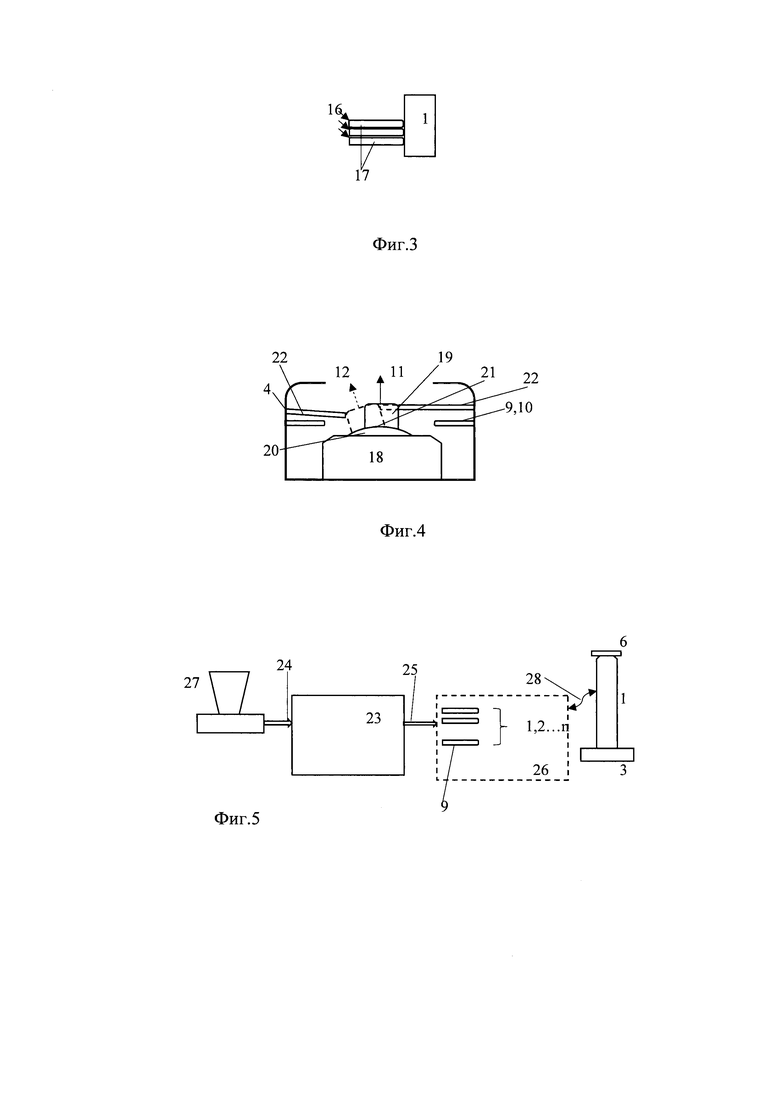
Варианты секционирования пиропатронов 9 показаны на фиг. 2,3. В частности, на фиг. 2 показано последовательное расположение секций, а на фиг. 3 - параллельное. пиропатрон 9 может быть выполнен в виде гильзы 12 (на фиг. 2 показан частичный разрез), в полости которой размещены несколько гильз-секций 13 с пороховым зарядом 14. Упоры 15 (выполненные в виде внутренних колец с клиновидным сечением) позволяют основаниям гильз-секций 13 перемещаться только в направлении толкателя 8 пиропатрона 9. Срабатывание секций происходит при подаче напряжения на соответствующие контакты по проводникам 16. И, как показано на фиг. 3, отдельные секции 17, каждая из которых представляет собой пиропатрон, могут быть объединены в параллельный блок, образующий пиропатрон 9. В этом случае при расчете отклоняющего момента учитывается плечо каждой секции 17. При достаточном количестве пиропатронов 9, размещенных по периметру опоры 1 возможно использование не секционированных пиропатронов 9, однако большей точности позиционирования можно добиться за счет применения секционированных пиропатронов 9.
Еще один вариант выполнения опоры 1 показан на фиг. 4. Здесь опора 1 состоит из нижней части 18 и верхней части 19, между которыми размещен шарнир в виде полусферы 20, закрепленной на нижней части 18 опоры 1 и полусферической поверхности 21 нижнего основания верхней части 19 опоры 1, при этом поверхность 21 выполнена с возможностью скольжения по полусфере 20. По периметру верхней части 19 опоры 1 к ней крепятся 4,6,8... 16 пружинных элементов 22, создающих возвращающий момент. Как показано на фиг. 4 пунктиром, когда толкатель 8 правого пиропатрона 9 «выстреливает» в верхнюю часть 19 опоры 1, она отклоняется влево, правый пружинный элемент 22 растягивается, а левый сжимается, ограничивая таким образом отклонение верхней части 19 опоры 1.
На фиг. 5 изображена блок-схема механизма позиционирования, также один из возможных вариантов реализации.
Механизм позиционирования (фиг. 5) содержит основание 3, позиционируемую платформу 6 с приводом в виде упругой опоры 1 и блока из n (n = 4, 6, 8, 12, 16…) секционированных пиропатронов 9, а также процессор 23 с информационным входом 24 и управляющим выходом 25, подключенным к приводу (контактам соответствующих пиропатронов 9, образующих блок пиропатронов, который обозначен позицией 26. Данный механизм снабжен также средством слежения 27, при этом средство слежения 27 и процессор 23 выполнены совместно с возможностью распознавания объектов в окружающем пространстве и регистрации вектора скорости этих объектов относительно основания 3. Как отмечалось, выполнение опоры 1 упругой достигается либо использованием в качестве опоры упругих элементов (создающих возвращающий момент при угловом смещении), либо введением упругих элементов между опорой 1 и коробом 4 основания 3.
Выход средства слежения 27 соединен с информационным входом 24 процессора 23, а упругая опора 1 привода выполнена с возможностью углового перемещения во всем диапазоне позиционирования и кинематически соединена с расположенными по ее периметру пиропатронами 9, контакты которых подключены к управляющему выходу процессора 23. Эта кинематическая связь обозначена на фиг. 5 стрелкой 28 и может осуществляться как в момент позиционирования, так и одновременно в исходном положении и в момент позиционирования (ср. фиг. 1 и фиг. 4). Средство слежения 27 может быть выполнено в виде видеокамеры, радара, инфракрасного прибора наблюдения, любого иного регистратора параметров или меток или, наоборот, их отсутствия, с соответствующим интерфейсом. В его составе может быть процессор первичной обработки или отсутствовать такой блок. Назначением средства слежения 27 является обнаружение заданных объектов в окружающем пространстве и регистрация их положения в два или более последовательных момента времени, что позволяет определить направление и величину их скорости относительно основания 3, а также зафиксировать или предсказать момент их появления в диапазоне позиционирования платформы 6 (дуга 29 на фиг. 1). Назначением процессора 23 является вычисление необходимого положения платформы 6 для взаимодействия установленного на ней аппарата с обнаруженным внешним объектом, момента такого взаимодействия (с учетом задержек его перемещения, срабатывания привода и т.д.), расчет требуемого усилия со стороны привода и выдача команды на соответствующие секции 13 соответствующих пиропатронов 9.
Кроме того, как отмечено выше, назначением средства слежения 27 совместно с процессором 23 является распознавание объектов и определение вектора их относительной скорости. Совместно в данном случае означает, что данные операции могут осуществляться в процессоре предварительной обработки средства слежения 27 с последующей выдачей данных на информационный вход 24 процессора 23, в самом процессоре 23 по последовательным изображениям, полученным от средства слежения 27, либо частично в средстве слежения 27, а частично в процессоре 23. Решение подобных задач в современной вычислительной технике является типовым как в случае использования одного процессора, так и при разделении задачи между двумя и более процессорами, включая обмен данными между ними.
Что же касается алгоритма выбора секций 13, используемого процессором 23 при управлении приводом, он также может базироваться на решении стандартных задач. Например, после определения точки взаимодействия аппарата и объекта в диапазоне 29 и требуемого положения платформы 6 процессор 23 может вычислить оптимальный момент (вектор силы), приводящий платформу 6 в нужное положение (равновесное или нет) в нужный момент времени, а затем выбрать из всех возможных сочетаний секций 13 пиропатронов 9, хранящихся в памяти процессора 23, наиболее близкое. К тому же результату приведет расчет момента, производимый для каждого распознанного объекта в окружающем пространстве по заложенным в память параметрам опоры 1 и пороховых зарядов 14.
В результате предлагаемый механизм позиционирования ориентирует платформу 6 в нужном направлении в течение долей секунды, что является критически необходимым при высоких относительных скоростях искомых объектов и основания 3.
| название | год | авторы | номер документа |
|---|---|---|---|
| Контрольный пункт для пропуска людей, не представляющих угрозы заражения окружающих вирусным заболеванием с аэрозольным распространением | 2021 |
|
RU2775882C1 |
| СПОСОБ ПОЗИЦИОНИРОВАНИЯ ОБЪЕКТА | 2022 |
|
RU2794046C1 |
| СИСТЕМА АКТИВНОЙ СТАБИЛИЗАЦИИ МАЛОРАЗМЕРНОГО ПЛАВАТЕЛЬНОГО СРЕДСТВА | 2014 |
|
RU2570998C1 |
| СИСТЕМА УПРАВЛЕНИЯ КЛАПАНАМИ ДВИГАТЕЛЯ | 2000 |
|
RU2175071C1 |
| АКТИВНОЕ ПРИСПОСОБЛЕНИЕ ДЛЯ ДВИЖЕНИЯ ПО ВОДЕ В ВИДЕ КИЛЯ И ЕГО ВАРИАНТЫ | 2014 |
|
RU2570924C1 |
| ПРЕЦИЗИОННЫЙ ПРИВОД ЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ | 2016 |
|
RU2644409C1 |
| Устройство для позиционирования беспилотного летательного аппарата на посадочной площадке | 2019 |
|
RU2707465C1 |
| Устройство защиты от беспилотных летательных аппаратов | 2023 |
|
RU2813389C1 |
| МОБИЛЬНЫЙ НАЗЕМНЫЙ СПЕЦИАЛЬНЫЙ КОМПЛЕКС ПРИЕМА И ОБРАБОТКИ ИЗОБРАЖЕНИЙ | 2010 |
|
RU2460136C2 |
| Способ экспресс-диагностики вирусных заболеваний в фазе активного выделения вируса | 2021 |
|
RU2784291C1 |
Изобретение относится к области механики и может быть использовано в измерительной технике, исследовательских целях, военном деле и т.д. для практически мгновенного позиционирования подвижной платформы с установленным на ней позиционируемым аппаратом относительно основания, неподвижно закрепленного на движущемся объекте или носителе, в частности, при обнаружении и распознании заданного предмета в окружающем пространстве. Механизм позиционирования содержит основание, позиционируемую платформу с приводом и процессор с информационным входом и управляющим выходом, подключенным к приводу. При этом он снабжен средством слежения, при этом средство слежения и процессор выполнены совместно с возможностью распознавания объектов в окружающем пространстве и регистрации вектора скорости этих объектов относительно основания, выход средства слежения соединен с информационным входом процессора. Привод выполнен в виде упругой опоры с возможностью углового перемещения во всем диапазоне позиционирования, кинематически соединенной с расположенными по ее периметру пиропатронами, контакты которых подключены к управляющему выходу процессора. Технический результат – повышение быстродействия механизма позиционирования. 1 з.п. ф-лы, 5 ил.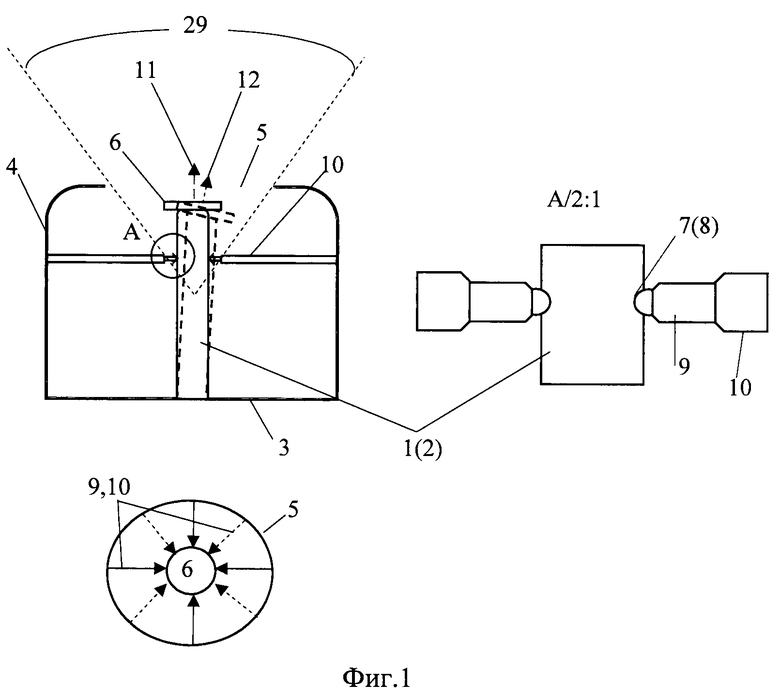
1. Механизм позиционирования, содержащий основание, позиционируемую платформу с приводом и процессор с информационным входом и управляющим выходом, подключенным к приводу, отличающийся тем, что он снабжен средством слежения, при этом средство слежения и процессор выполнены совместно с возможностью распознавания объектов в окружающем пространстве и регистрации вектора скорости этих объектов относительно основания, выход средства слежения соединен с информационным входом процессора, а привод выполнен в виде упругой опоры с возможностью углового перемещения во всем диапазоне позиционирования, кинематически соединенной с расположенными по ее периметру пиропатронами, контакты которых подключены к управляющему выходу процессора.
2. Механизм позиционирования по п. 1, отличающийся тем, что пиропатроны выполнены ступенчатыми.
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| УСТРОЙСТВО СКАНИРОВАНИЯ И СЛЕЖЕНИЯ | 2017 |
|
RU2645733C1 |
| СПОСОБ ПОЛУЧЕНИЯ АРИЛГИДРАЗОНОПРОИЗВОДНЫХ АМИДОКСИМА ЭТИЛОВОГО ЭФИРА МЕЗОКСАЛЕВОЙКИСЛОТЫ | 0 |
|
SU167861A1 |
| ПИРОКЛАПАН | 2015 |
|
RU2619967C2 |

