Изобретение относится к области электромеханики. Прецизионные приводы необходимы в робототехнике, а также в системах, где требуется прецизионное позиционирование объекта вдоль одной координаты.
Известно устройство для механического перемещения объекта вдоль одной координаты, содержащее основание, пьезоэлемент, подвижную каретку, прижим описанное в патенте РФ №2297072 МПК: H01L 37/28, H01L 41/095, публ. 10.07.2007 г. Проблемой создания прецизионных приводов линейного перемещения в настоящее время является увеличение диапазона перемещений, повышения скорости и точности позиционирования, снижения неравномерности перемещения и повышения стабильности.
Известно устройство, описанное в патенте РФ на полезную модель №87572, МПК. H01L 41/00 публ. 10.10.2009. Устройство предназначено для механического перемещения подвижной платформы, выполненной в виде каретки, вдоль одной координаты и содержит неподвижное основание, механизм перемещения, выполненный в виде движителя, включающего пьезоактуатор. Согласно полезной модели движитель выполнен из двух пластин, соединенных между собой, с возможностью смещения относительно друг друга только в направлении перемещения, например, с помощью четырех упругих шарниров, причем к одной из пластин жестко пристыкована перемещаемая каретка, а другая пластина прижата к неподвижному основанию для перемещения и фрикционно с ним взаимодействует. Но данное техническое решение ограничивает область применения устройства: низкая скорость позиционирования объекта, ограниченная возможностями пьезоактуатора; резкая прерывистость поступательного движения; колебания перемещаемого объекта в вертикальной плоскости; отсутствие системы контроля положения позиционируемого объекта в горизонтальной плоскости.
Задачей предлагаемого изобретения является создание прецизионного привода линейного перемещения, позволяющего добиться технического результата, заключающегося в увеличении скорости позиционирования, повышении точности позиционирования при снижении неравномерности линейных перемещений.
Технический результат достигается тем, что в прецизионном приводе линейного перемещения, содержащем основание и механизм перемещения подвижной платформы с позиционируемым объектом с помощью пьезоактуатора, в отличие от известного подвижная платформа с позиционируемым объектом установлена на основной подвижной платформе посредством упругих подвесов, механизм перемещения основной подвижной платформы представляет собой связку шарико-винтовой передачи и вентильного двигателя, а прецизионный привод дополнен системой управления.
Кроме того, прецизионный привод отличается системой управления, включающей два датчика обратной связи, связанных с блоком управления, первый из которых - магнитный энкодер, установленный вдоль направления перемещения позиционируемого объекта и предназначенный для определения положения основной подвижной платформы с микрометровой точностью, и второй - встроенный в пьезоактуатор тензодатчик, определяющий параметры сжатия/растяжения пьезоактуатора для контроля положения подвижной платформы с позиционируемым объектом с нанометровой точностью.
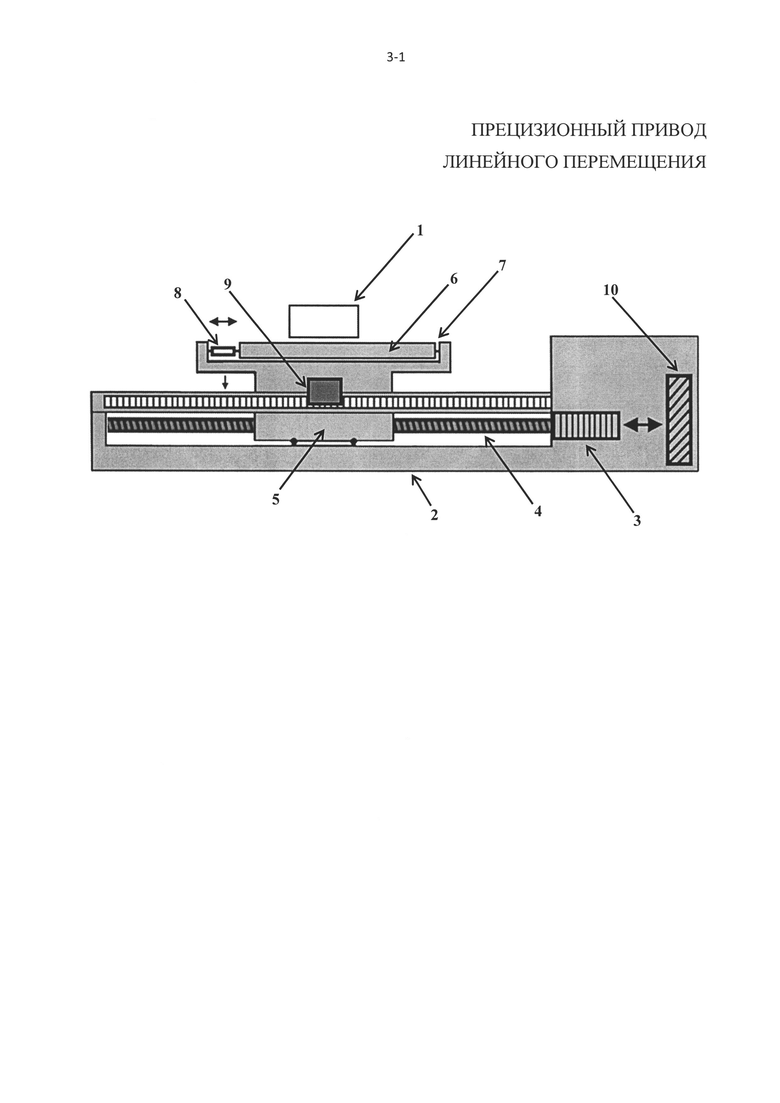
Функциональная схема прецизионного привода линейного перемещения представлена на чертеже.
Прецизионный привод линейного перемещения позиционируемого объекта 1 состоит из жесткого основания 2, на котором расположен вентильный двигатель 3, выполненный в виде замкнутой электромеханической системы, состоящей из бесколлекторной машины постоянного тока с трапецеидальным распределением магнитного поля в зазоре, датчика положения ротора, преобразователя координат и усилителя мощности. В свою очередь, вентильный двигатель связан с шарико-винтовой передачей 4, выполненной в виде механического привода, преобразующего вращательное движение в линейное перемещение. К ходовой гайке шарико-винтовой передачи 4 жестко крепится основная подвижная платформа 5. На ней установлена подвижная платформа 6 с позиционируемым объектом 1 посредством упругих подвесов 7, которые могут представлять собой как систему пружин, так и упругую полимерную прокладку с устойчивыми характеристиками. Подвижная платформа 6 с позиционируемым объектом 1 является дополнительной подвижной платформой 6. Возможность ограниченных поступательных движений дополнительной подвижной платформы 6 относительно основной подвижной платформы 5 обеспечивает пьезоактуатор 8, выполненный в виде прецизионного короткоходного линейного электропривода, преобразующего электрическое напряжение в контролируемое линейное перемещение с высоким развиваемым усилием и с субмилисекундным временем отклика. В пьезоактуаторе 8 установлен тензодатчик - датчик, преобразующий величину деформации в удобный для измерения электрический сигнал, по которому в процессе работы оценивается относительное положение подвижных платформ 5 и 6. Контроль положения основной подвижной платформы 5 относительно жесткого основания 2 осуществляется с помощью магнитного энкодера 9 с линейкой - устройства, преобразующего результат линейного перемещения в электрический сигнал, позволяющий однозначно определить положение основной подвижной платформы 5 в направлении движения.
Управление вентильным двигателем 3 и пьезоактуатором 8 осуществляется с помощью реализованной в виде блока управления 10 специальной системы управления по принципу обратной связи по сигналам с датчиков. Блок управления 10 - это система, построенная на логических элементах и управляемая микроконтроллером (не показан) по специальной программе.
Пьезоактуатор 8 компенсирует неравномерность перемещения, вызванную погрешностями шарико-винтовой передачи 4, пульсациями момента вентильного двигателя 3, и значительно улучшает контроль постоянства скорости перемещения позиционируемого объекта 1. Пьезоактуатор 8 также обеспечивает компенсацию люфта и резкой прерывистости движения в моменты начала движения и остановки основной подвижной платформы 5.
Указанная совокупность признаков проявляет новые свойства, заключающиеся в том, что благодаря указанным признакам скорость позиционирования прецизионного объекта 1 повышается и ограничивается техническими характеристиками вентильного двигателя 3. Также, благодаря использованию основной подвижной платформы 5 и дополнительной подвижной платформы 6, связанной с пьезоактуатором 8, удается избавиться от прерывистого движения и колебаний позиционируемого объекта 1 в вертикальной плоскости.
Прецизионный привод линейного перемещения работает следующим образом.
Шарико-винтовая передача 4 приводится в действие вентильным двигателем 3, происходит перемещение основной подвижной платформы 5 вдоль оси с микрометровой точностью. От датчика обратной связи - магнитного энкодера 9 на блок управления 10 передаются данные о текущем положении основной подвижной платформы 5 относительно жесткого основания 2 с микрометровой точностью. От датчика обратной связи - тензодатчика, встроенного в пьезоактуатор 8, на блок управления 10 передаются данные о текущем положении дополнительной подвижной платформы 6 с позиционируемым объектом 1 относительно основной подвижной платформы 5 с нанометровой точностью.
Полученные данные используются блоком управления 10 для формирования и коррекции управляющих сигналов для вентильного двигателя 3 и пьезоактуатора 8 с целью достижения требуемой точности позиционирования и скорости премещения позиционируемого объекта 1.
Получить требуемый технический результат позволяет использование гибридного принципа построения привода, а именно одновременное использование двух систем линейного перемещения - связки шарико-винтовой передачи с вентильным двигателем и пьезоактуатора.
Таким образом, достигнут технический результат - прецизионный привод линейного перемещения позволяет с нанометровой точностью осуществлять линейные перемещения позиционируемого объекта. Применение гибридного принципа построения привода, то есть использование двух подвижных платформ, а также применение связки вентильного двигателя с шарико-винтовой передачей и пьезоактуатора позволяет повысить скорость и точность позиционирования, стабильность работы и плавность хода.
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод линейного перемещения | 2024 |
|
RU2826823C1 |
| КОНТРОЛЛЕР ОПЕРАТОРА ДЛЯ УПРАВЛЕНИЯ РОБОТОХИРУРГИЧЕСКИМ КОМПЛЕКСОМ | 2019 |
|
RU2718595C1 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| Роботизированная хирургическая система транскатетерного протезирования клапана аорты | 2022 |
|
RU2789707C1 |
| НАНОМЕТРИЧЕСКОЕ ПОЗИЦИОНИРУЮЩЕЕ УСТРОЙСТВО | 2002 |
|
RU2233736C2 |
| ПОДЪЕМНОЕ УСТРОЙСТВО | 2024 |
|
RU2835700C1 |
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ ТРИБОТЕХНИЧЕСКИХ ХАРАКТЕРИСТИК МАТЕРИАЛОВ | 2015 |
|
RU2600080C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА ПО ДВУМ ВЗАИМНО ПЕРПЕНДИКУЛЯРНЫМ НАПРАВЛЕНИЯМ | 2014 |
|
RU2579781C2 |
| Установка для диффузионной сварки | 2017 |
|
RU2646517C1 |
| МЕХАТРОННАЯ СИСТЕМА ФОРМИРОВАНИЯ ИНДИВИДУАЛЬНОГО ИНТРАОПЕРАЦИОННОГО ПОЛОЖЕНИЯ ПАЦИЕНТА | 2022 |
|
RU2803982C1 |
Изобретение относится к электротехнике и может использоваться в робототехнике, а также в системах, где требуется прецизионное позиционирование объекта вдоль одной координаты. Прецизионный привод линейного перемещения содержит жесткое основание, шарико-винтовую передачу, приводимую в движение вентильным двигателем, основную подвижную платформу, жестко связанную с ходовой гайкой, дополнительную подвижную платформу с позиционируемым объектом, связанную с основной посредством упругих подвесов и приводимую в движение пьезоктуатором. Система управления достигает необходимой точности работы путем сложения скоростей и перемещений двух параллельно работающих систем линейного перемещения, получая информацию с датчиков обратной связи, в качестве которых может быть использованы: магнитный энкодер с установленной вдоль направления движения линейкой для определения с микрометровой точностью положения основной подвижной платформы. Встроенный в пьезоактуатор тензодатчик определяет параметры сжатия/растяжения пьезоактуатора для определения с нанометровой точностью положения дополнительной подвижной платформы с позиционируемым объектом относительно основной. Технический результат состоит в расширении функциональных возможностей за счет увеличения скорости позиционирования, повышения точности позиционирования при снижении неравномерности линейных перемещений. 1 з.п. ф-лы, 1 ил.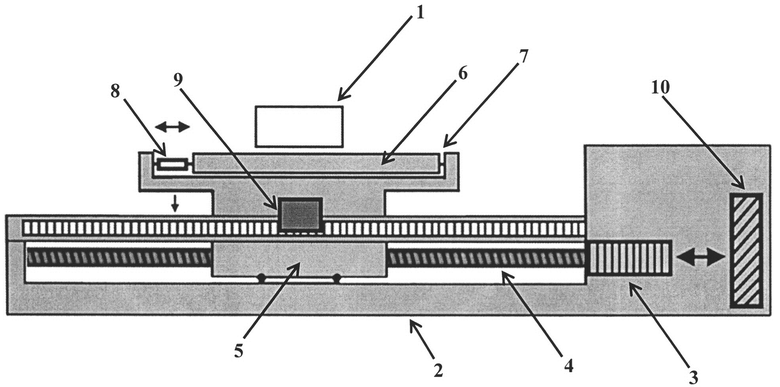
1. Прецизионный привод линейного перемещения, содержащий основание и механизм перемещения подвижной платформы с позиционируемым объектом с помощью пьезоактуатора, отличающийся тем, что подвижная платформа с позиционируемым объектом установлена на основной подвижной платформе посредством упругих подвесов, механизм перемещения основной подвижной платформы выполнен в виде связки шарико-винтовой передачи и вентильного двигателя, при этом шарико-винтовая передача выполнена в виде механического привода, преобразующего вращательное движение в линейное перемещение, а к ходовой гайке шарико-винтовой передачи жестко прикреплена основная подвижная платформа, прецизионный привод дополнен системой управления, использующейся для формирования и коррекции управляющих сигналов для вентильного двигателя и пьезоактуатора с целью достижения требуемой точности позиционирования и скорости перемещения позиционируемого объекта.
2. Прецизионный привод линейного перемещения по п. 1, отличающийся системой управления, включающей два датчика обратной связи, связанных с блоком управления, первый из которых - магнитный энкодер, установленный вдоль направления перемещения позиционируемого объекта и предназначенный для определения положения основной подвижной платформы с микрометровой точностью, и второй - встроенный в пьезоактуатор тензодатчик, определяющий параметры сжатия/растяжения пьезоактуатора для контроля положения подвижной платформы с позиционируемым объектом с нанометровой точностью.
| ИНЕРЦИОННЫЙ ДВИГАТЕЛЬ | 2005 |
|
RU2297072C1 |
| УСТРОЙСТВО ДЛЯ МИКРОПЕРЕМЕЩЕНИЙ ОБЪЕКТА | 2004 |
|
RU2257645C1 |
| ПЬЕЗОСКАНЕР | 2001 |
|
RU2199171C2 |
| Механизм для разгрузки на ходу вагонеток маятниковых канатных дорог | 1949 |
|
SU87572A1 |
| US 6215121 B1, 10.04.2001. | |||

