Изобретение относится к подъемно-транспортному машиностроению, в частности к кранам-манипуляторам с тросовым приводом, применяемым для работ, требующих манипулированием грузом (общепромышленного назначения). Краны манипуляторы с тросовыми (канатными) приводами находят широкое применение при решении разнообразных прикладных задач. В частности при строительных работах, при погрузо\разгрузочных работах в портах, при работе на объектах энергетики, в машиностроении и т.п.
Известен башенный кран-манипулятор для механизации строительного производства, который повышает производительность строительных работ путем непрерывной подачи грузов в зону монтажа (Авторское свидетельство СССР 1414760 «Башенный кран-манипулятор», МПК 4 В66С 23/26,1988).
Недостатками такого решения являются ограниченность рабочей зоны, зависимость величины грузоподъемности крана от вылета стрелы и возможность изменять положение груза только по двум координатам.
Известен, также, кран-манипулятор с автоматизированной системой управления, преимущественно для перемещения контейнеров с радиоактивными отходами, содержащий подвижный с дальномерами мост, установленную на нем с возможностью передвижения грузовую тележку, несущую ориентируемый с приводом грузоподъемный механизм, соединенный с помощью блоковой подвески с управляемым захватом, снабженным устройством фиксации его пространственного положения при этом вертикальные стойки рамной формы траверсы выполнены с возможностью ограниченного перемещения относительно опорной рамы корпуса управляемого захвата, и проушинами соединены с кронштейнами подвески крана (Патент РФ 111532, МПК В66С 17/00, опубл. 20.12.2011).
Недостатком данного крана-манипулятора является низкая эффективность полиспастных систем манипулирования захватом в связи с невозможностью пространственного маневрирования грузом и воздействием на него вертикальным надавливающим усилием. В данной конструкции возможен только подъем вверх.
Задачей, на решение которой направлено настоящее изобретение, является устранение указанного недостатка и расширение технических и технологических возможностей.
Достигаемый технический результат заключается в повышении технической и эксплуатационной эффективности кранов-манипуляторов с тросовыми приводами путем равномерного распределения нагрузки манипулирования, устранения зависимости грузоподъемности крана от вылета стрелы и повышение манипуляционных характеристик путем обеспечения перемещения захвата крана по 6-ти координатам.
Указанный технический результат достигается тем, что кран-манипулятор, с автоматизированной системой управления, включающий мост с дальномерами, манипуляционные лебедки, рабочий конец тросов которых закреплен на грузовой тележке, установленной на мосте с возможностью передвижения, установленный на грузовой тележке грузоподъемный механизм, соединенный с управляемым поворотным захватом с устройством фиксации его пространственного положения, отличающееся тем, что он снабжен вертикальными направляющими штангами с приводными лебедками, мост выполнен из основной - верхней, и дополнительных боковых рам, снабжен траверсой, установленной с возможностью перемещения, и шарнирно установленной на траверсе грузовой тележкой с поворотным захватом, также установленной с возможностью перемещения, и дополнительными тележками - двумя большими тележками, у каждой из которых по два колеса, и двумя малыми тележками, у каждой из которых по одному колесу, две манипуляционные лебедки установлены на одной из больших тележек, также он снабжен четырьмя дополнительными манипуляционными лебедками, по две из которых установлены на малых тележках, основная - верхняя, рама выполнена в виде центральной балки и оперта на две большие тележки, к одной из которых, посредством балок, присоединены малые тележки, при этом рабочие концы тросов всех манипуляционных лебедок закреплены на грузовой тележке с поворотным захватом.
В зависимости от условий работы - конфигурации и размеров помещения (цеха, ангара), или открытой производственной площадки и т.п., целесообразно использование следующих модификаций:
- дополнительные боковые металлические рамы выполнены в виде вертикальных стоек;
- одна из дополнительных боковых металлических рам выполнена двухстоечной;
- обе дополнительные боковые металлические рамы выполнены двухстоечными;
- дополнительные боковые металлические рамы выполнены в виде горизонтальных балок, на которых установлены дополнительные тележки.
В указанную совокупность включены все признаки, каждый из которых необходим, а все вместе достаточны для достижения указанного технического результата.
Изобретение поясняется чертежами:
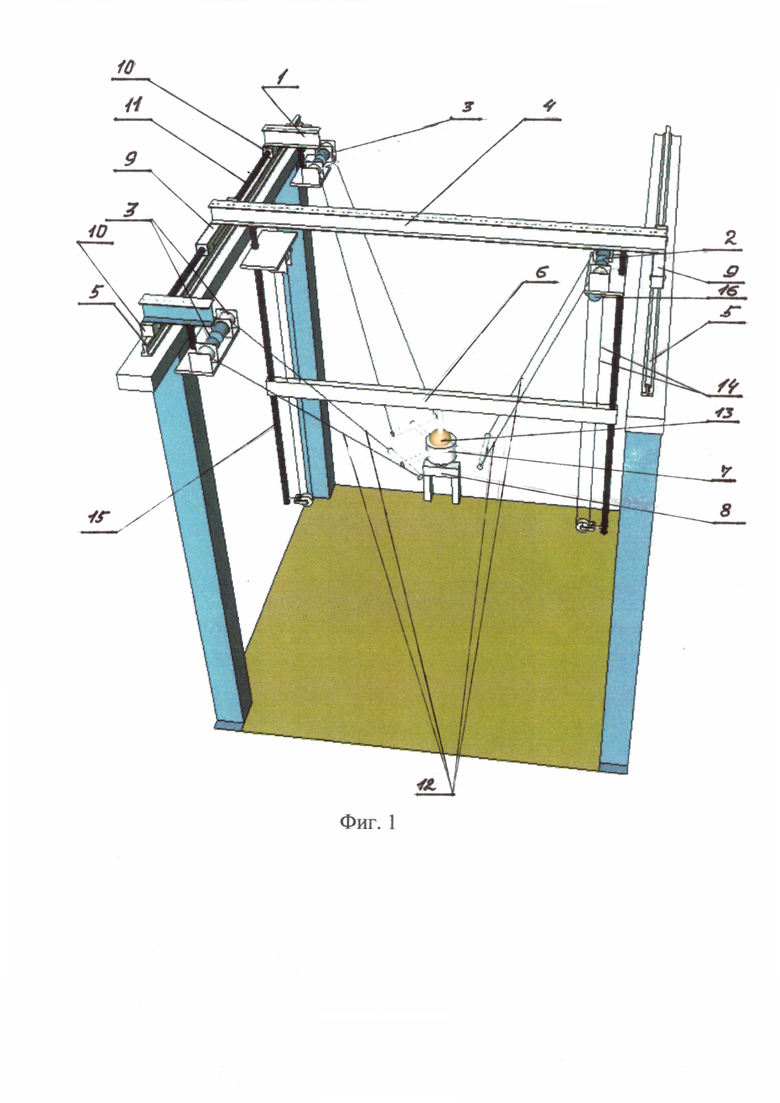
на фиг. 1 изображен общий вид крана-манипулятора установленного в помещении, с использованием его строительных элементов сооружения (здания);
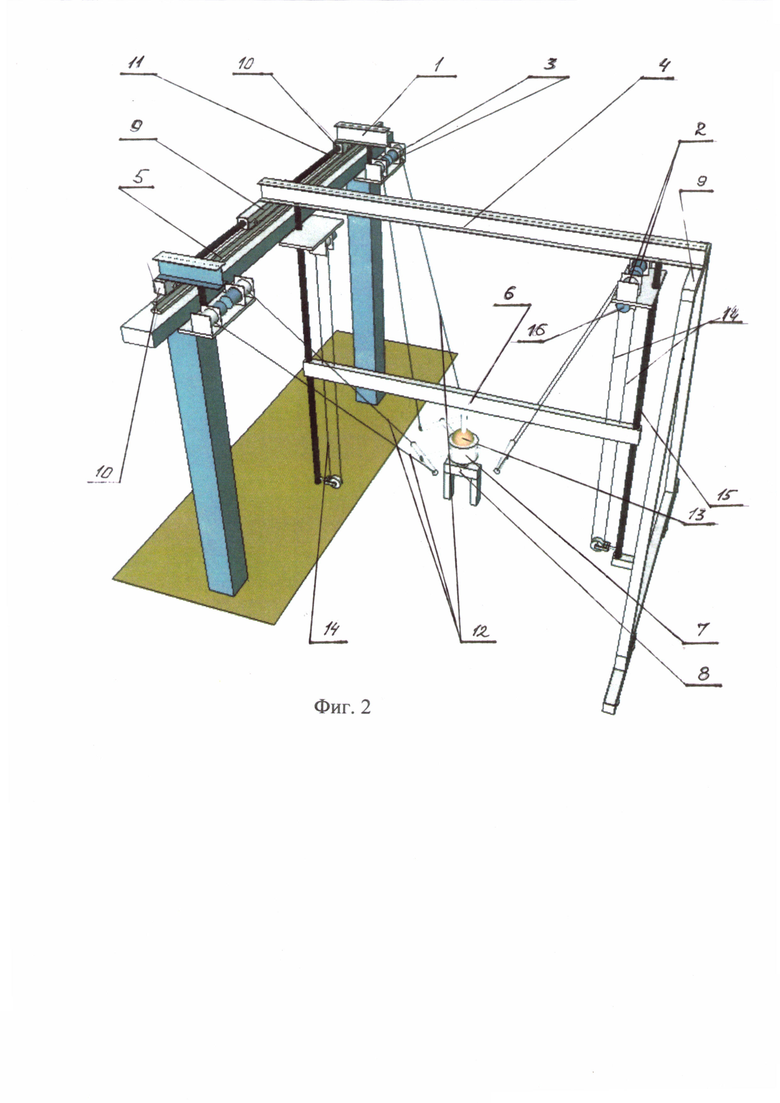
на фиг. 2 - с частичным использованием его строительных элементов и одной дополнительной боковой рамы;
на фиг. 3 - пример манипулирования грузом;
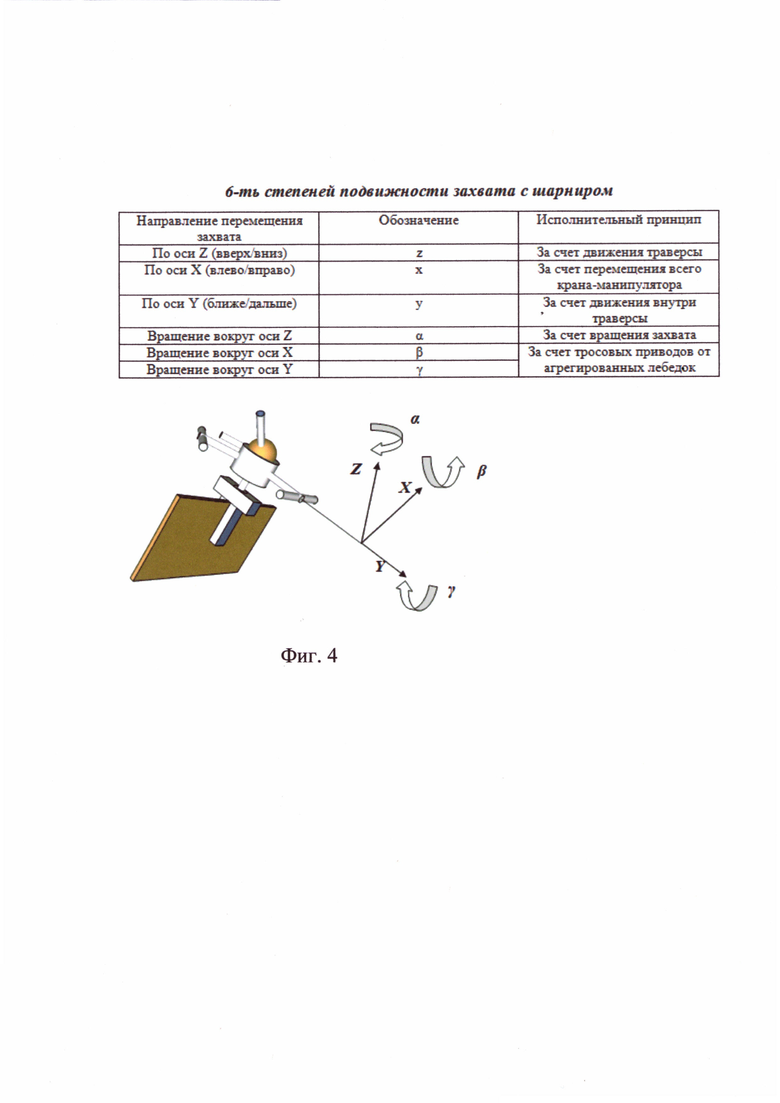
на фиг. 4 - схема степеней подвижности захвата.
Кран-манипулятор с тросовыми приводами включает с автоматизированной системой управления, включающий мост 1 с дальномерами, манипуляционные лебедки 2 и дополнительные манипуляционные лебедки 3. Мост выполнен из основной - верхней 4, и дополнительных боковых рам 5, снабжен траверсой 6, грузовой тележкой 7 с поворотным захватом 8. Кроме того, он снабжен дополнительными тележками - двумя большими тележками 9, у каждой из которых по два колеса, и двумя малыми 10 тележками, у каждой из которых по одному колесу.
Две манипуляционные лебедки 2 установлены на одной из больших тележек 9, также он снабжен четырьмя дополнительными манипуляционными лебедками 3, по две из которых установлены на малых тележках 10. Основная - верхняя рама 4 выполнена в виде центральной балки и оперта на две большие тележки 9, к одной из которых, посредством балок 11, присоединены малые тележки 10, при этом рабочие концы тросов всех манипуляционных лебедок 2 и 3 закреплены на грузовой тележке 7 с поворотным захватом 8.
Манипуляционные лебедки 2 и 3 в плане, установлены по углам равностороннего треугольника.
Кран-манипулятор с тросовыми приводами работает следующим образом. Груз, например, металлический лист, фиксируется поворотным захватом 8, тросы 12 приводимые в движение манипуляционными лебедками 2 и 3 изменяют положение грузовой тележки с поворотным захватом 8 за счет вращения в шарнире 13 и изменения длины тросов 12. Для вертикального перемещения груза тросы 14 оказывают воздействие на траверсу 6, установленную на вертикальных направляющих штангах 15, что позволяет достичь необходимых усилий как при движении груза вертикально вверх, так и при движении груза вертикально вниз. В совокупности все приводные тросы обеспечивают манипулирование поворотным захватом 8 в 6-ти координатах.
Установка манипуляционных лебедок 2 и 3 по вершинам равностороннего треугольника в плане, позволяет равномерно распределять нагрузку на тросы 12 для манипулирования поворотным захватом 8, а для реализации 6-ти координатного манипулирования, мостовая конструкция крана оснащена двумя вертикальными направляющими штангами 15 с приводными лебедками 16, по которым перемещается направляющая траверса 6 с грузовой тележкой 7 и поворотным захватом 8.
Предложенная конструкция позволяет достичь указанный технический результат за счет равномерного распределения нагрузки манипулирования, устранения зависимости грузоподъемности крана от вылета стрелы. Кроме того, предложенный кран позволяет повысить манипуляционные характеристики путем обеспечения перемещения захвата крана по 6-ти координатам.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПЕРЕВОЗКИ СУПЕРКОНТЕЙНЕРОВ С РАЗРЯДНЫМИ И ЭКОЛОГИЧЕСКИ ОПАСНЫМИ ГРУЗАМИ | 2013 |
|
RU2550940C1 |
| Разгрузочно-погрузочный манипулятор-тренажёр с параллельным тросовым приводом | 2023 |
|
RU2835999C1 |
| Кран-манипулятор для монтажа зданий из сборного железобетона | 1984 |
|
SU1203011A1 |
| МНОГОЯРУСНАЯ МЕХАНИЗИРОВАННАЯ АВТОСТОЯНКА | 1999 |
|
RU2188290C2 |
| НАВЕСНАЯ ТРЕЛЕВОЧНАЯ ТЕЛЕЖКА | 2022 |
|
RU2785391C1 |
| МОСТОВОЙ КРАН | 2010 |
|
RU2492134C1 |
| Машина для укладки сборно-разборных дорожных покрытий | 1984 |
|
SU1201391A1 |
| Транспортно-монтажное судно-катамаран | 1981 |
|
SU1052442A1 |
| Грузовая тележка козлового крана | 1975 |
|
SU523031A1 |
| БОРТОВОЕ ПОДЪЕМНОЕ УСТРОЙСТВО ПРЕИМУЩЕСТВЕННО ДЛЯ ТЯЖЕЛОГО ТРАНСПОРТНОГО САМОЛЕТА АН-124-100 | 2000 |
|
RU2194006C2 |

Изобретение относится к подъемно-транспортному машиностроению, в частности к кранам-манипуляторам с тросовым приводом. Кран-манипулятор с тросовыми приводами включает автоматизированную систему управления, мост (1) с дальномерами, манипуляционные лебедки (2) и дополнительные манипуляционные лебедки (3). Мост выполнен из основной - верхней (4), и дополнительных боковых рам (5), снабжен траверсой (6), грузовой тележкой (7) с поворотным захватом (8). Мост снабжен дополнительными тележками - двумя большими тележками (9), у каждой из которых по два колеса, и двумя малыми (10) тележками, у каждой из которых по одному колесу. Две манипуляционные лебедки (2) установлены на одной из больших тележек (9), также он снабжен четырьмя дополнительными манипуляционными лебедками (3), по две из которых установлены на малых тележках (10). Основная верхняя рама (4) выполнена в виде центральной балки и оперта на две большие тележки (9), к одной из которых, посредством балок (11), присоединены малые тележки (10). Рабочие концы тросов всех манипуляционных лебедок (2) и (3) закреплены на грузовой тележке (7) с поворотным захватом (8). Достигается повышение технической и эксплуатационной эффективности кранов-манипуляторов с тросовыми приводами путем равномерного распределения нагрузки манипулирования. 4 з.п. ф-лы, 4 ил.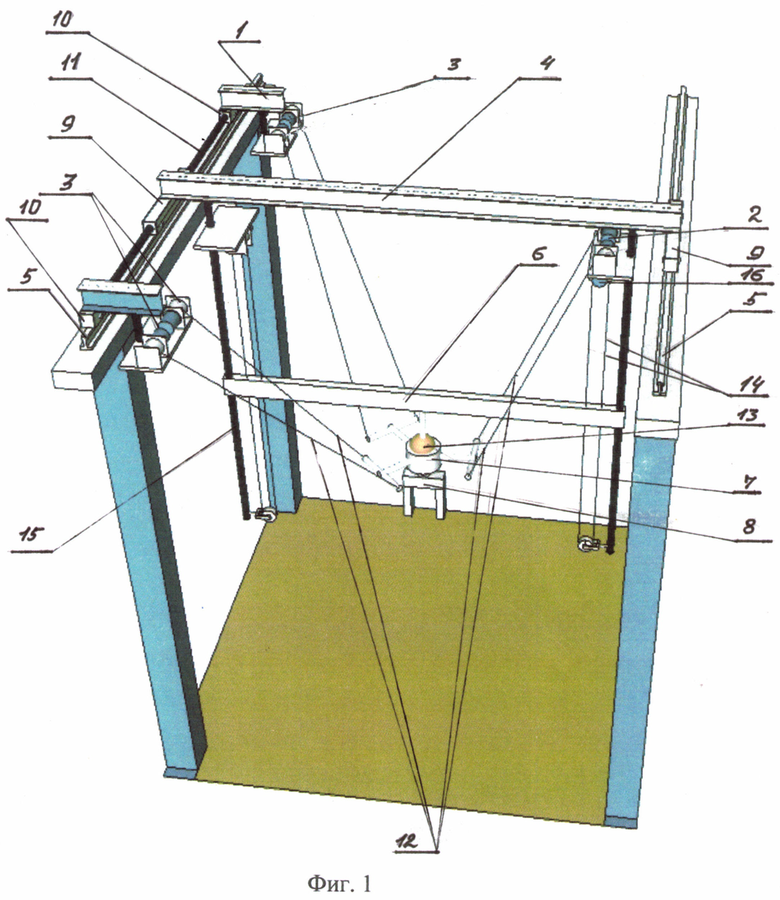
1. Кран-манипулятор с автоматизированной системой управления, включающий мост с дальномерами, манипуляционные лебедки, рабочий конец тросов которых закреплен на грузовой тележке, установленной на мосте с возможностью передвижения, установленный на грузовой тележке грузоподъемный механизм, соединенный с управляемым поворотным захватом с устройством фиксации его пространственного положения, отличающийся тем, что он снабжен вертикальными направляющими штангами с приводными лебедками, мост выполнен из основной - верхней, и дополнительных боковых рам, снабжен траверсой, установленной с возможностью перемещения, и шарнирно установленной на траверсе грузовой тележкой с поворотным захватом, также установленной с возможностью перемещения, и дополнительными тележками - двумя большими тележками, у каждой из которых по два колеса, и двумя малыми тележками, у каждой из которых по одному колесу, две манипуляционные лебедки установлены на одной из больших тележек, также он снабжен четырьмя дополнительными манипуляционными лебедками, по две из которых установлены на малых тележках, основная - верхняя, рама выполнена в виде центральной балки и оперта на две большие тележки, к одной из которых, посредством балок, присоединены малые тележки, при этом рабочие концы тросов всех манипуляционных лебедок закреплены на грузовой тележке с поворотным захватом.
2. Кран-манипулятор по п. 1, отличающийся тем, что дополнительные боковые рамы выполнены в виде вертикальных металлических стоек.
3. Кран-манипулятор по п. 1, отличающийся тем, что одна из дополнительных боковых металлических рам выполнена двухстоечной.
4. Кран-манипулятор по п. 1, отличающийся тем, что дополнительные боковые металлические рамы выполнены двухстоечными.
5. Кран-манипулятор по п. 1, отличающийся тем, что дополнительные боковые рамы выполнены в виде горизонтальных балок, на которых установлены дополнительные тележки.
| RU 210639 U1, 25.04.2022 | |||
| УСТАНОВКА ДЛЯ РАСКОНСЕРВАЦИИ ДЕТАЛЕЙ | 0 |
|
SU195285A1 |
| CN 109397262 A, 01.03.2019 | |||
| WO 2014063669 A2, 01.05.2014. | |||

