Изобретение относится к подъёмным механизмам и может быть использовано в качестве разгрузочно-погрузочного манипулятора для перемещения различных грузов в автономном режиме или в присутствии оператора. Также оно может выполнять функцию тренажёра.
Манипуляторы с тросовыми приводами различного назначения находят широкое применение при решении большого спектра инженерных задач, при разгрузочно-погрузочных работах, при работе на объектах энергетики, в машиностроении и т.п. Известен CABLECRANE (см. "Механизмы перспективных робототехнических систем". М.: Техносфера, 2020. С. 265-295).
Недостатком такого решения является необходимость дооснащения мостового крана дополнительными лебедками и проведение работ по установке и снятию кабины для перемещения людей, то есть отсутствие автономности.
Известна кабельная роботизированная система для имитации движения - тренажёр-манипулятор с тросовыми приводами (Патент DE «Кабельная роботизированная система для имитации движения» 2015002 297, МПК G09B 9/02; B25J 9/10, 03.11.2016).
В таком тренажёре-манипуляторе с тросовыми приводами движение кабины обеспечивается восьмью неподдерживаемыми стальными тросами, прикреплёнными к лебёдкам, расположенным на пространственной раме одним концом и к кабине другим концом.
Недостатком такого решения является необходимость создания внешнего каркаса - конструкции для размещения лебёдок или установка лебёдок на стены большого здания, что потребует организации и проведения строительно-монтажных работ с оформлением соответствующей проектно-разрешительной документации.
Известно также устройство перемещения грузов, состоящее из пяти электродвигателей с механизмами укладки тросов и редукторами. Четыре троса, служащие для перемещения груза, захватный механизм, соединённый с редуктором электродвигателя через ролики, расположенные на опорных башнях, дополнительный трос, соединённый через муфту с роликом с тросами, предназначенный для перемещения груза в вертикальной плоскости. Остальные четыре троса предназначены для перемещения объекта в горизонтальной плоскости (Патент РФ «Устройство перемещения грузов» 2372274, МПК В66С 21/00, 10.11.2009).
Основным недостатком описанного устройства перемещения грузов является необходимость производства и монтажа опорных башен, также трос, предназначенный для вертикального перемещения груза, не позволяет реализовывать залавливающее воздействие, а расположение электродвигателей с устройствами укладки троса и редукторами у оснований башен требует применения тросов большой длины.
Задачей, на решение которой направлено настоящее изобретение, является расширение функциональных возможностей и повышение технической и эксплуатационной эффективности использования разгрузочно-погрузочных манипуляторов.
Техническим результатом, достигаемым в результате использования изобретения, является то, что предложенное техническое решение обеспечивает возможность оказывать залавливающее воздействие на груз, а также использование навесного устройства - спредера, которое позволяет захватывать и перемещать грузы, а также при дооснащении его кабиной позволяет реализовывать функции тренажёра-симулятора движений.
Технический результат достигается тем, что разгрузочно-погрузочный манипулятор-тренажёр с параллельным тросовым приводом, состоящий из пяти электродвигателей с узлом управления, механизмами для укладки тросов и редукторами, четырех тросов, служащих для перемещения груза в горизонтальной плоскости, соединенных с редуктором электродвигателя через ролики, площадки с грузозахватным приспособлением - спредером, и механизмом перемещения груза в вертикальной плоскости, снабжён несущей конструкцией, выполненной в виде козлового крана с крюком, грузовой тележкой, двумя консольными балками, дополнительными тросами и шестым электродвигателем с узлом управления, механизмом для укладки дополнительных тросов и редуктором, установленными на площадке с грузозахватным приспособлением - спредером, при этом дополнительные тросы соединены свободными концами с двумя консольными балками, установленными на грузовой тележке козлового крана и дополнительным креплением для двух тросовых приводов на другом конце моста крана.
Кроме того, в разгрузочно-погрузочном манипуляторе-тренажёре с параллельным тросовым приводом механизм перемещения груза в вертикальной плоскости выполнен в виде штанги с возможностью перемещения в вертикальной плоскости, с приводом, имеющим зубчатые рейки, а между рейками и спредером установлено звено с двумя шарнирами Гука.
Также он снабжен дополнительной грузовой тележкой, механизм перемещения груза в вертикальной плоскости выполнен в виде грузозахватного устройства козлового крана, а консольные балки установлены на дополнительной грузовой тележке.
А также он снабжен съёмной кабиной для обучающегося на тренажёре, жёстко закрепленной на грузозахватном приспособлении - спредере.
Штанга имеет телескопический механизм изменения длины.
В указанную совокупность включены все признаки, каждый из которых необходим, а все вместе достаточны для достижения указанного технического результата.
Изобретение поясняется чертежами, где
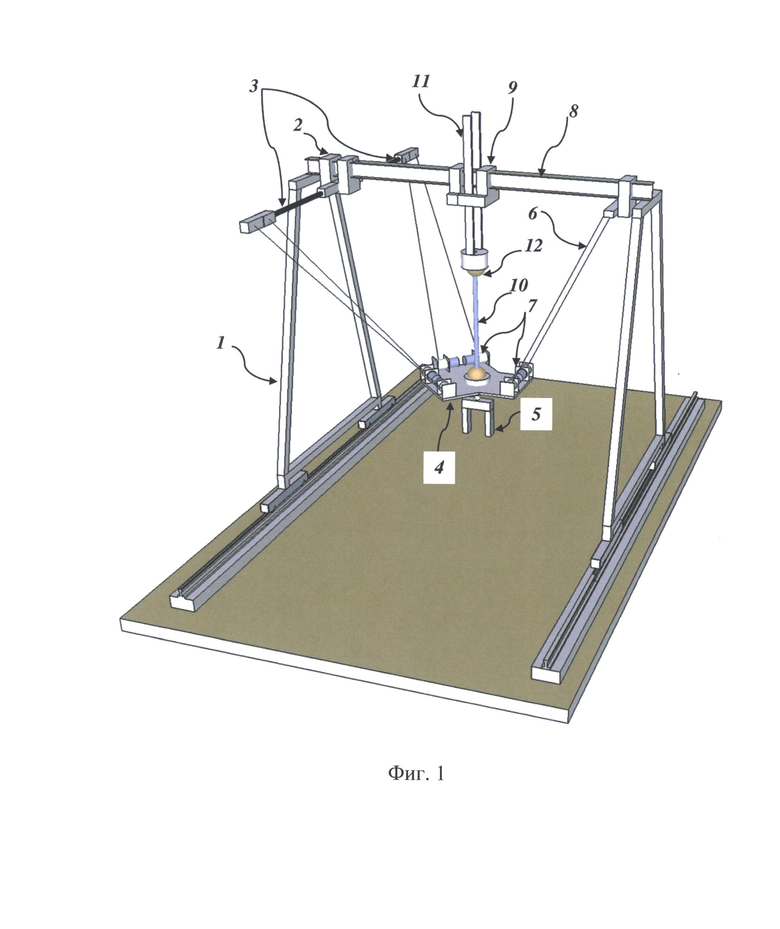
- на фиг. 1 изображен общий вид разгрузочно-погрузочного манипулятора-тренажёра с параллельным тросовым приводом;
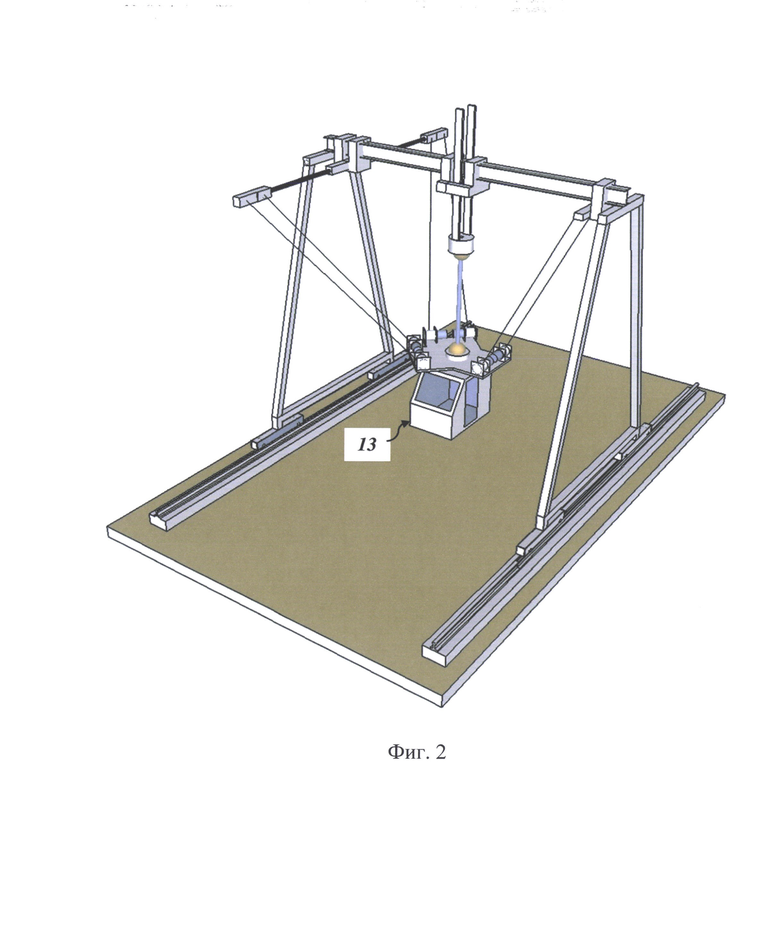
- на фиг. 2 показано исполнение разгрузочно-погрузочного манипулятора-тренажёра с рамой 2 для установки кабины при реализации функционала тренажёра;
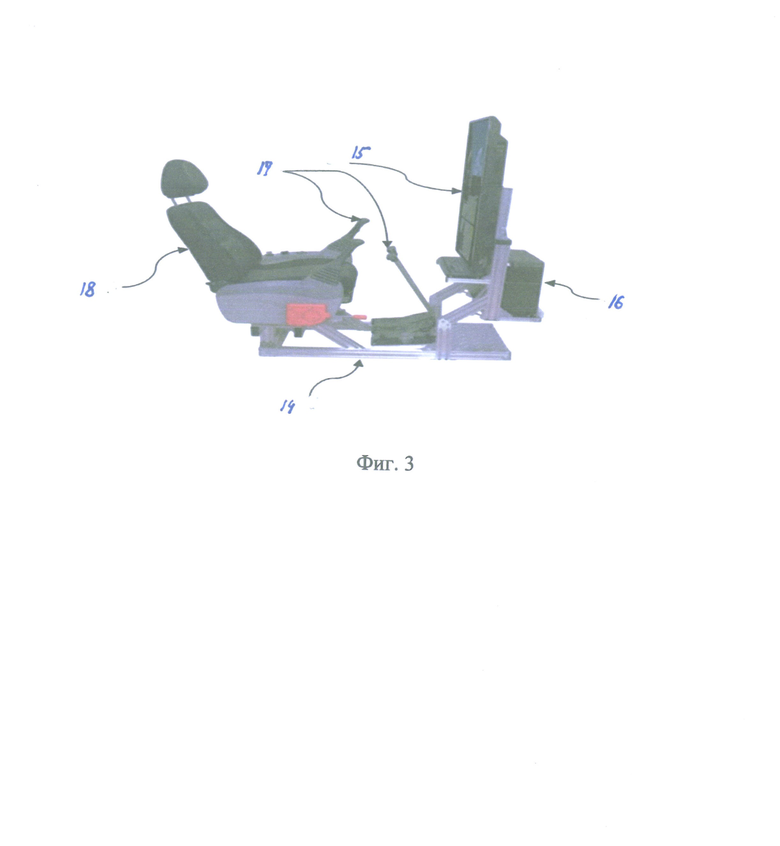
- на фиг. 3 изображён серийно выпускаемый модуль для подготовки операторов спецтехники.
Разгрузочно-погрузочный манипулятор-тренажёр с параллельным тросовым приводом (фиг. 1) включает несущую конструкцию, выполненную в виде козлового крана 1 с грузовой тележкой 2, двумя шарнирными консольными балками 3, установленными на раме грузозахватного приспособления - спредера 4 с захватом 5, и шесть тросовых приводов, состоящих из тросов 6 и автоматизированно управляемых лебёдок 7. Четыре из указанных тросов закреплены концами на двух консольных балках 3, а два других троса закреплены на другом конце моста козлового крана 1. В нерабочем положении шарнирные консольные балки 3 расположены параллельно балке 8 козлового крана 1, раскрывающиеся под углом 90 градусов при реализации задачи автономного манипулирования грузом и выполнении функции тренажёра. Механизм перемещения груза в вертикальной плоскости установлен на дополнительной 9 тележке козлового крана 1 и выполнен в виде штанги 10 с возможностью перемещения в вертикальной плоскости посредством привода, имеющего зубчатые рейки 11, а между рейками 11 и спредером установлено звено с двумя шарнирами Гука 12.
Для выполнения функции тренажёра на раме грузозахватного приспособления - спредера 4, монтируется съемная кабина 13 для обучающихся (фиг. 2). Внутри кабины устанавливается серийно выпускаемый модуль для подготовки операторов спецтехники (фиг. 3). Модуль содержит рамную конструкцию 14, монитор 15, персональный компьютер 16 для запуска программы симуляции, органы управления разгрузочно-погрузочным манипулятором-тренажёром 17 и кресло оператора 18. Рамная конструкция 14 жёстко крепится к кабине 13 (фиг. 2).
Разгрузочно-погрузочный манипулятор-тренажёр с параллельным тросовым приводом работает следующим образом (фиг. 1).
Козловой кран 1 перемещается по поверхности земли, опираясь на рельсовые пути, вперед и назад относительно положения покоя. Грузовая тележка 2 зафиксирована в крайнем положении относительно центрального пролета козлового крана 1. Две шарнирные консольные балки 3 раскрыты, и на них закреплены концы тросовым приводов, а другие концы тросовых приводов наматываются на лебёдки, установленные на раме грузозахватного приспособления - спредера 4 с захватом 5. что позволяет перемещать спредер 4. Шесть тросовых приводов, состоящих из тросов 6, и автоматизированно управляемых лебёдок 7, изменяют свою длину, в зависимости от заданной программы перемещения. Захват 5 зажимает груз, и каждая лебёдка 7 получает согласованные сигналы на совершение наматывания или разматывания тросового привода. С работой лебёдок 7 согласуется работа вертикальной штанги 11, обеспечивающей залавливающее усилие вниз при необходимости. Таким образом, груз перемещается в пространстве в любое заданное положение.
При замене захвата 5 на кабину 13 разгрузочно-погрузочный манипулятор превращается в тренажёр, работающий аналогично.
Работа с модулем для обучаемого на тренажёре (оператора)
Обучаемый на тренажёре (оператор) размещается на кресле оператора 18, жёстко соединённом с рамной конструкцией 14, активирует программу обучения на персональном компьютере 16 и, наблюдая за ситуативной моделью поведения разгрузочно-погрузочного манипулятора-тренажёра в мониторе 15, перемещает органы управления 17, выполняя программу тренировки.
Предложенное техническое решение позволяет исключить недостатки известных устройств (в том числе значительных капитальных затрат на производство и монтаж опорных башен или создание внешнего каркаса), обеспечивает возможность оказывать залавливающее воздействие на груз. Кроме того, использование навесного устройства - спредера, которое позволяет захватывать и перемещать грузы, а также при дооснащении его кабиной позволяет реализовывать функции тренажёра-симулятора движений.
| название | год | авторы | номер документа |
|---|---|---|---|
| Динамический тренежёр краноманипулятора мастерской технического обслуживания и ремонта | 2023 |
|
RU2809961C1 |
| СПОСОБ ПЕРЕМЕЩЕНИЯ ГРУЗОВ ПРИ ПОМОЩИ ПОДЪЕМНОГО КРАНА И ПОДЪЕМНЫЙ КРАН ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2424177C1 |
| КРАН ДЛЯ ОБРАЩЕНИЯ С ОТРАБОТАВШИМ ЯДЕРНЫМ ТОПЛИВОМ В ЗАЩИТНОЙ КАМЕРЕ | 2007 |
|
RU2352516C1 |
| КРАН-МАНИПУЛЯТОР | 2005 |
|
RU2312057C2 |
| Устройство для проведения подъёмно-транспортных работ в реакторном зале атомной станции | 2017 |
|
RU2638032C1 |
| ПОГРУЗЧИК БОРТОВОЙ | 1998 |
|
RU2216462C2 |
| КРАН-МАНИПУЛЯТОР | 2004 |
|
RU2274559C1 |
| НАВЕСНАЯ ТРЕЛЕВОЧНАЯ ТЕЛЕЖКА | 2022 |
|
RU2785391C1 |
| БАШЕННЫЙ КРАН | 1990 |
|
RU2006449C1 |
| АЭРОМОБИЛЬНЫЙ ПЕРЕГРУЗОЧНЫЙ КОМПЛЕКС | 1992 |
|
RU2047552C1 |
Изобретение относится к области перемещения различных грузов в автономном режиме или в присутствии оператора и выполняет функцию тренажёра. Разгрузочно-погрузочный манипулятор-тренажёр с параллельным тросовым приводом состоит из шести электродвигателей с узлом управления, механизмами для укладки тросов и редукторами. Четыре троса служат для перемещения груза в горизонтальной плоскости и соединены с редуктором электродвигателя через ролики. Оснащён площадками с грузозахватным приспособлением - спредером, и механизмом перемещения груза в вертикальной плоскости. Снабжён несущей конструкцией, выполненной в виде козлового крана с крюком, грузовой тележкой, двумя консольными балками, дополнительными тросами. Механизм для укладки дополнительных тросов и редуктор установлены на площадке с грузозахватным приспособлением - спредером. На спредере также закреплена съёмная кабина для обучающегося на тренажёре. Дополнительные тросы соединены свободными концами с двумя консольными балками, установленными на грузовой тележке козлового крана, и дополнительным креплением для двух тросовых приводов на другом конце моста козлового крана. Обеспечивается возможность оказывать залавливающее воздействие, захватывать и перемещать грузы, а также реализовывать функции тренажёра-симулятора движений. 3 з.п. ф-лы, 3 ил.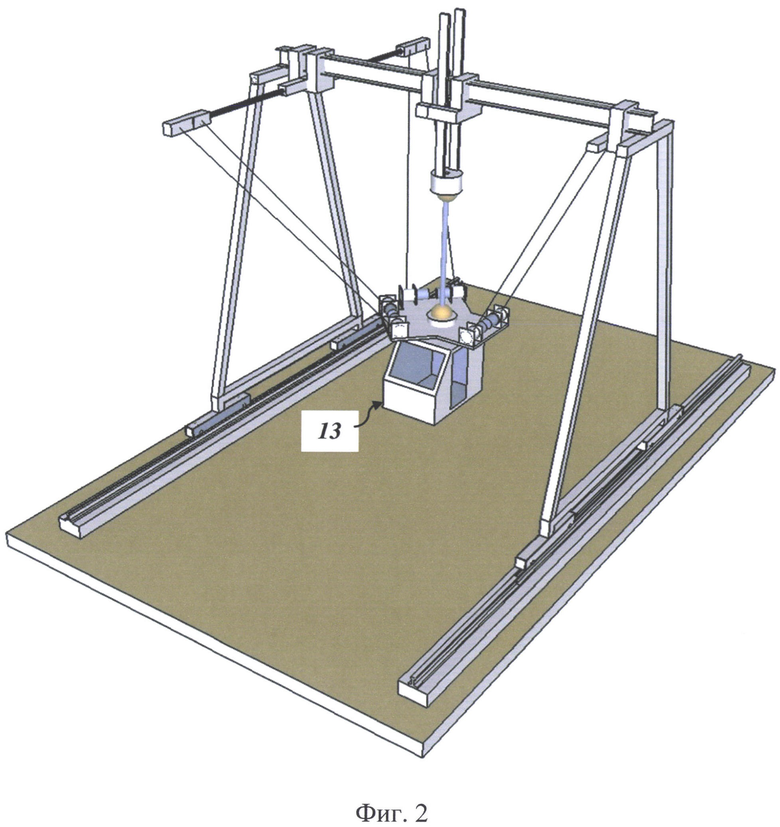
1. Разгрузочно-погрузочный манипулятор-тренажёр с параллельным тросовым приводом, состоящий из пяти электродвигателей с узлом управления, механизмами для укладки тросов и редукторами, четырех тросов, служащих для перемещения груза в горизонтальной плоскости, соединённых с редуктором электродвигателя через ролики, площадки с грузозахватным приспособлением - спредером, и механизмом перемещения груза в вертикальной плоскости, отличающийся тем, что он снабжён несущей конструкцией, выполненной в виде козлового крана с крюком, грузовой тележкой, двумя консольными балками, дополнительными тросами и шестым электродвигателем с узлом управления, механизмом для укладки дополнительных тросов и редуктором, установленными на площадке с грузозахватным приспособлением - спредером, на спредере также закреплена съёмная кабина для обучающегося на тренажёре, при этом дополнительные тросы соединены свободными концами с двумя консольными балками, установленными на грузовой тележке козлового крана, и дополнительным креплением для двух тросовых приводов на другом конце моста козлового крана.
2. Разгрузочно-погрузочный манипулятор-тренажёр с параллельным тросовым приводом по п. 1, отличающийся тем, что механизм перемещения груза в вертикальной плоскости установлен на грузовой тележке козлового крана, выполнен в виде штанги с возможностью перемещения в вертикальной плоскости, с приводом, имеющим зубчатые рейки, а между рейками и спредером установлено звено с двумя шарнирами Гука.
3. Разгрузочно-погрузочный манипулятор-тренажёр с параллельным тросовым приводом по п. 1, отличающийся тем, что он снабжён дополнительной грузовой тележкой, механизм перемещения груза в вертикальной плоскости выполнен в виде грузозахватного устройства козлового крана, а консольные балки установлены на грузовой тележке козлового крана.
4. Разгрузочно-погрузочный манипулятор-тренажёр с параллельным тросовым приводом по п. 1, отличающийся тем, что штанга имеет телескопический механизм изменения длины.
| 1972 |
|
SU410447A1 | |
| УСТРОЙСТВО ПЕРЕМЕЩЕНИЯ ГРУЗОВ | 2008 |
|
RU2372274C1 |
| Кабельный кран | 1951 |
|
SU94866A1 |
| СИГАРЕТА С ДВОЙНОЙ ОБЕРТКОЙ, МАШИНА И СПОСОБ ДЛЯ ЕЕ ИЗГОТОВЛЕНИЯ | 2002 |
|
RU2267973C2 |
| DE 102016004275 A1, 12.10.2017. | |||

