Область техники, к которой относиться изобретение
Изобретение относится к области военной техники, а именно, - к ракетам-мишеням с аэродинамическим управлением в широком диапазоне высот применения и может быть использовано при разработке летательных аппаратов различного назначения.
Уровень техники
В связи с развитием высокоскоростных и высокоманевренных перехватчиков летательных аппаратов актуальной становиться задача создания соответствующего мишенного парка летательных аппаратов. В качестве перспективного направления развития ракет-мишеней рассматривается дальнейшее повышение высот и маневренности их применения. Одним из современных разработанных ракетных мишенных комплексов является АРМК «Фаворит-РМ» с использованием ракеты 5В55.
Раскрытие сущности изобретения
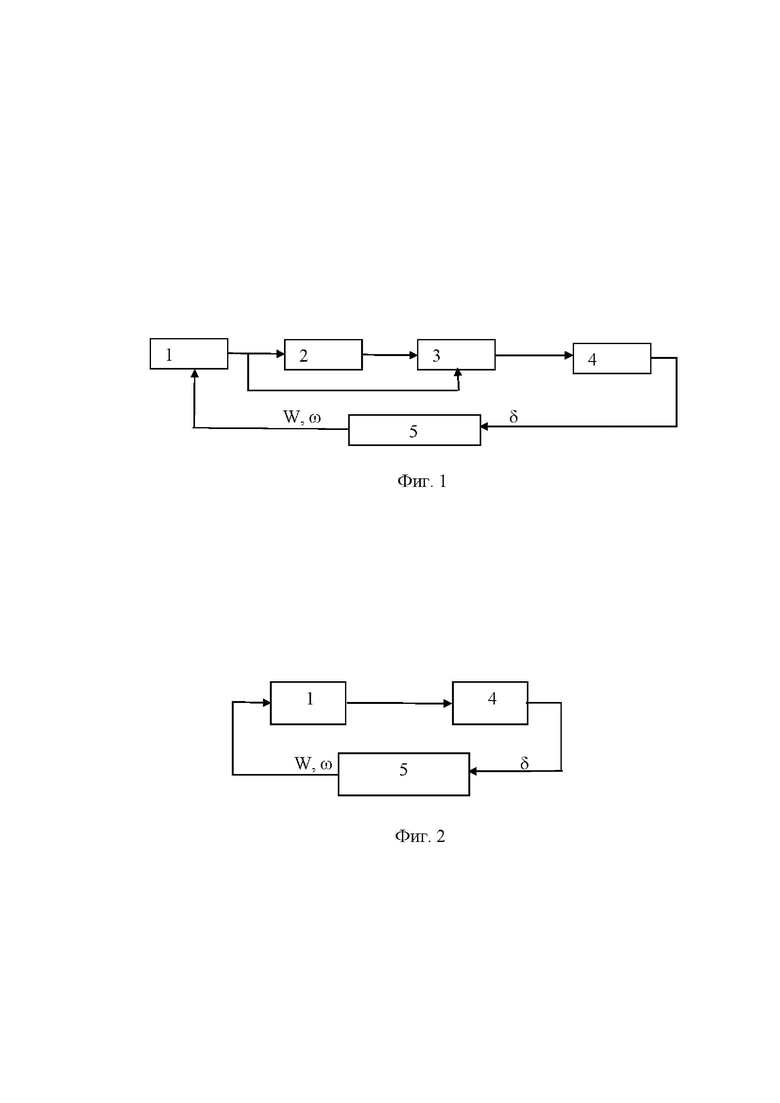
Прототипом рассматриваемого изобретения является система управления и стабилизации ракетой-мишенью РМ 5В55 (далее - СУ). Центральным элементом СУ является штатный автопилот 5А25Б, реализованный на аналоговой основе (Фиг. 1), где:
поз. 1 фиг. 1 - блок выработки команд управления реализован на вновь разработанной цифровой инерциальной системе управления (ИСУ-210), представляющий собой устройство, формирующее команды управления и состоящее из сравнивающего и корректирующего устройств.
Сравнивающее устройство предназначено для обработки полученной координатно-временной информации и сравнения ее с требуемыми координатами в трехмерном пространстве в соответствующие моменты времени.
Корректирующее устройство, с учетом информации на выходе сравнивающего устройства, формирует команду управления на исключение рассогласования между желаемым и фактическим положением ракеты в принятой системе координат;
поз. 2 фиг. 1- блок отработки команд управления и стабилизации ракеты относительно трех осей связанной системы координат (аналоговый штатный автопилот 5А25Б);
поз. 3 фиг. 1- согласующее устройство между блоками 1 и 2, преобразующее цифровой код в аналоговый сигнал;
поз. 4 фиг. 1 - блок управления рулевыми приводами (аналоговый, функционально связанный с блоком поз. 2 фиг. 1), представляющий собой математическую модель функционирования рулевой следящей системы, на вход которой подаются управляющие сигналы из блока поз. 3 фиг. 1, в результате чего на выходе блока формируются команды управления рулями, осуществляющими требуемое движение ракеты-мишени в пространстве;
поз. 5 фиг. 1 - ракета-мишень;
δ - углы отклонения рулей (необходимые для управления РМ);
W - вектор ускорения (необходимый для расчета СУ);
ω - вектор угловой скорости (необходимый для расчета СУ).
Целью создания полностью цифровой системы управления РМ 5В55 является существенное повышение надежности ракеты-мишени (поз. 5 фиг. 1), расширение её функциональных возможностей, снижение стоимости СУ.
Эта цель достигается путем исключения аналоговых блоков (поз. 2 фиг. 1 и поз. 3 фиг.1) из состава СУ и передачей их функций блоку поз. 1 фиг. 2, где:
поз. 1 фиг. 2 - блок выработки команд управления;
поз. 4 фиг. 2 - блок управления рулевыми приводами;
поз. 5 фиг. 2 - ракета-мишень;
δ - углы отклонения рулей (необходимые для управления РМ);
W - вектор ускорения (необходимый для расчета СУ);
ω - вектор угловой скорости (необходимый для расчета СУ).
Это решение потребовало переработки алгоритмов управления ракеты-мишени (поз. 5 фиг. 2) в целом.
В такой комплектации ИСУ-210 присвоен индекс ИСУ-210-01, а ракете-мишени - индекс РМ 5В55-04.
Для отработки алгоритмов управления и стабилизации ракеты-мишени разработана математическая модель управления (ММУ РМ 5В55-04), которая описывает пространственное движение ракеты-мишени с крестообразным расположением оперения (в частности РМ 5В55-04).
В состав ММУ РМ 5В55-04 входят алгоритмы управления блока и блока поз. 2 фиг. 1. Разработанные алгоритмы управления могут использоваться при разработке различных типов изделий данного назначения.
Сущность предлагаемого технического решения заключается в отказе от аналоговых элементов системы управления и реализации алгоритмического обеспечения на едином контроллере бортовой цифровой вычислительной машины (БЦВМ) ИСУ-210, что позволяет перевести всю систему управления движением летательных аппаратов на цифровую основу.
Положительный эффект предлагаемого технического решения заключается в повышении надежности и расширении функциональных возможностей ракеты-мишени, улучшении динамики её полета, снижении стоимости за счет исключения из состава СУ сложных гироскопических устройств.
Осуществление изобретения
Изобретение осуществляется при разработке и выборе параметров ракеты-мишени, её системы управления, а также программного обеспечения (ПО), реализуемого в БЦВМ ИСУ-210 на всех этапах разработки ракеты-мишени. Примером осуществления изобретения является разработка ракеты-мишени РМ-5В55-04 на основе серийной аналоговой ракеты 5В55.
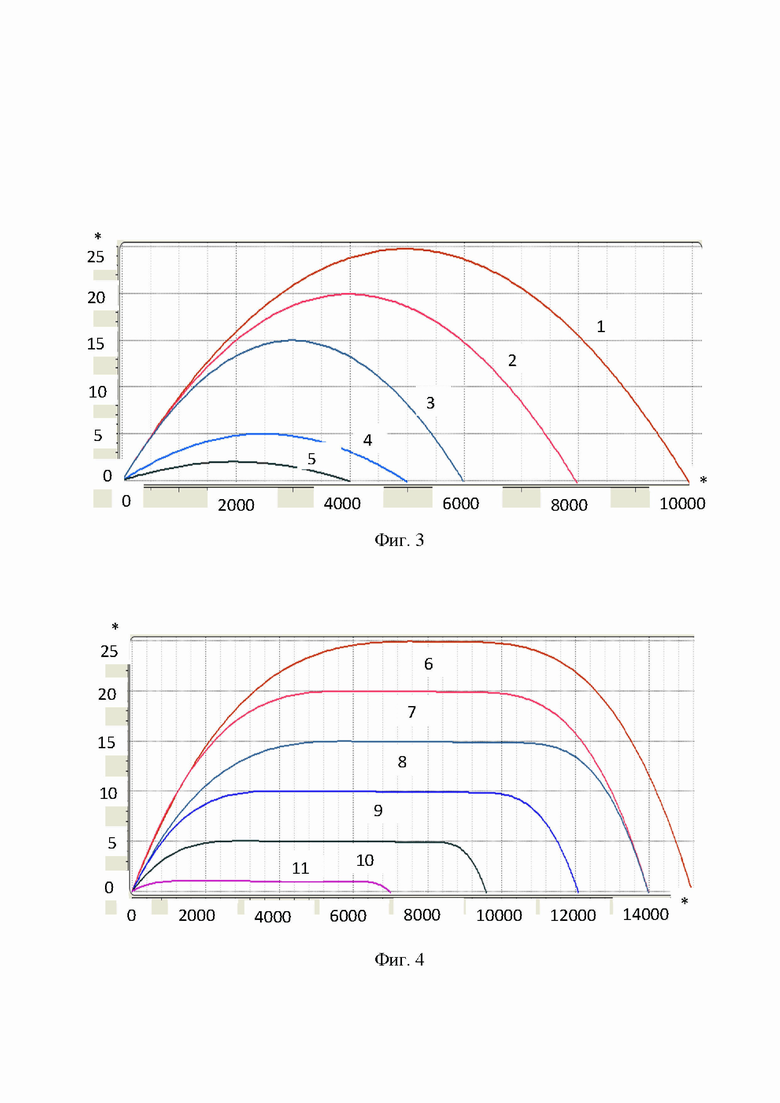
Использование специального ПО позволило разработать полностью цифровую современную систему управления, обеспечивающую движение ракет-мишеней по широкому спектру типовых траекторий, при этом на основе 19 опорных траекторий, позволяющих имитировать движение целей на конечном участке траектории, сформировано пять классов траекторий:
- параболические траектории (класс I);
- траектории с горизонтальным участком (класс II);
- баллистические траектории (класс III);
- кабрирование-пикирование, то есть, траектории, имитирующие маневренные характеристики целей (класс IV);
- аэробаллистические траектории (класс V).
Классификация траекторий приведена в таблице 1.
высота, км
дальность, км
Выбором параметров Сi, Di определяется форма желаемой опорной траектории.
Для каждой опорной траектории дано представление в аналитическом виде (в виде полинома):
при Xk < x ≤ Xk+1 k = 1,j
где: к - количество участков, на которые разбивается траектория;
j - индекс суммирования участков траектории;
nk - максимальная степень полинома на k-том участке;
i - индекс суммирования;
A i k - коэффициенты полинома на k-том участке;
х - аргумент полинома;
Y - значение функции полинома.
В качестве примера на Фиг. 3 и 4 показаны 5 траекторий классов I и II, приведённых в таблице 1.
Система управления полетом РМ-5В55-04 построена таким образом, чтобы с допустимой точностью реализовать приведённые опорные траектории.
Выполненное по результатам испытаний уточненное математическое обеспечение показало приемлемое совпадение реализованных типовых траекторий с опорными.
Автопилот высокоманевренного летального аппарата, содержащий блок выработки команд управления и блок отработки команд управления и стабилизации ракеты относительно трех осей связанной системы координат. Блок отработки команд управления и стабилизации выполнен с возможностью формирования команд управления на рулевые приводы летательного аппарата для отработки траектории полета на основании сформированной в бортовой БЦВМ одной из опорных траекторий. Достигается возможность перевода всей системы управления движением летательных аппаратов на цифровую основу. 4 ил., 1 табл.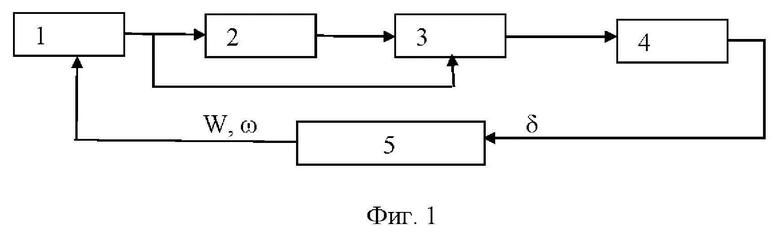
Автопилот высокоманевренного летального аппарата, содержащий блок выработки команд управления и блок отработки команд управления и стабилизации ракеты относительно трех осей связанной системы координат, выполненный с возможностью формирования команд управления на рулевые приводы летательного аппарата для отработки траектории полета на основании сформированной в бортовой БЦВМ одной из опорных траекторий, для каждой из которых дано представление в виде полинома
при Xk < x ≤ Xk+1k = 1,j,
где k – количество участков, на которые разбивается траектория;
j – индекс суммирования участков траектории;
nk – максимальная степень полинома на k-м участке;
i – индекс суммирования;
A ik – коэффициенты полинома на k-м участке;
х – аргумент полинома;
Y – значение функции полинома.
| АВТОПИЛОТ | 2008 |
|
RU2374131C1 |
| Способ получения закиси азота и аппарат для осуществления способа | 1955 |
|
SU103215A1 |
| US 20170349267 A1, 07.12.2017 | |||
| JP 2002073101 A, 12.03.2002 | |||
| US 20180364707 A1, 20.12.2018. | |||

