Изобретение относится к области электротехники и может быть использовано для электропитания бортовой аппаратуры, а также двигателей электропривода беспилотных летательных аппаратов мультироторного типа.
Известны устройства, позволяющие увеличить продолжительность полета беспилотного летательного аппарата мультироторного типа за счет использования технологии так называемых «привязанных беспилотных летательных аппаратов», подробное описание которых представлено в [1, 2]. Смысл функционирования данных аппаратов заключается в том, что из конструкции беспилотных летательных аппаратов мультироторного типа исключается самая тяжелая их часть, а именно - аккумуляторная батарея, которую в свою очередь заменяет электрический кабель, посредством которого через стационарный источник питания производится электроснабжение беспилотного летательного аппарата мультироторного типа. Данный способ позволяет осуществлять полет указанного аппарата значительный промежуток времени. Однако недостаток данных устройств заключается в ограниченном радиусе полета, зависящим от длины кабеля и высоты полета.
Недостаток данных устройств, устраняется за счет устройства, предложенного автором патента РФ [3], предназначенного для обеспечения электроэнергией мультироторного летательного аппарата, содержащее буксируемый внешний источник энергии с положительной плавучестью в воде и регулируемой плавучестью в воздушной среде, электрический кабель питания, аккумуляторную группу, расположенную внутри герметичного гидроизолированного корпуса, заполненного газом легче воздуха. Данное устройство позволяет повысить продолжительность полета за счет буксировки источника энергии по воде и в воздушной среде. Однако за счет наличия кабеля питания и буксируемого груза, снижаются его летно-технические характеристики, что делает круг применения данного устройства весьма ограниченным.
Техническим результатом изобретения является повышение продолжительности полета беспилотного летательного аппарата мультироторного типа.
Требуемый технический результат достигается тем, что в устройстве электропитания мультироторного беспилотного летательного аппарата, содержащим полетный контроллер, аккумуляторную батарею, понижающий DC-DC преобразователь, отличающееся тем, что в него дополнительно введены микроконтроллер управления электронным реле и электронным ключом, электронное реле, батарея параллельно соединенных суперконденсаторов, расположенная на плате-контроллере, повышающий импульсный DC-DC преобразователь с ограничителем выходного тока, батарея последовательно соединенных гибких термоэлектрических генераторов, защитный диод, электронный коммутационный ключ, повышающий импульсный DC-DC преобразователь, причем вход микроконтроллера управления электронным реле соединен прямой связью с выходом полетного контроллера, а выход в свою очередь соединен прямой связью с управляющими и питающими контактами электронного реле, первая группа рабочих контактов которого соединена прямой связью с контактами аккумуляторной батареи, а вторая группа рабочих контактов электронного реле соединена прямой связью с контактами батареи параллельно соединенных суперконденсаторов, расположенной на плате-контроллере, контакты которой в свою очередь соединены прямой связью с входом повышающего импульсного DC-DC преобразователя с ограничителем выходного тока, выход которого соединен прямой связью с входом полетного контроллера; батарея последовательно соединенных гибких термоэлектрических генераторов, расположена вокруг боковых поверхностей корпусов электродвигателей винтомоторных групп, контакты которой соединены прямой связью, через последовательно соединенный с отрицательным полюсом контакта батареи гибких термоэлектрических генераторов защитный диод с входом повышающего импульсного DC-DC преобразователя через электронный коммутационный ключ, соединенный прямой связью с выходом микроконтроллера управления электронным реле и электронным ключом, при этом выход повышающего импульсного DC-DC преобразователя соединен прямой связью с контактами батареи параллельно соединенных суперконденсаторов, расположенной на плате-контроллере.
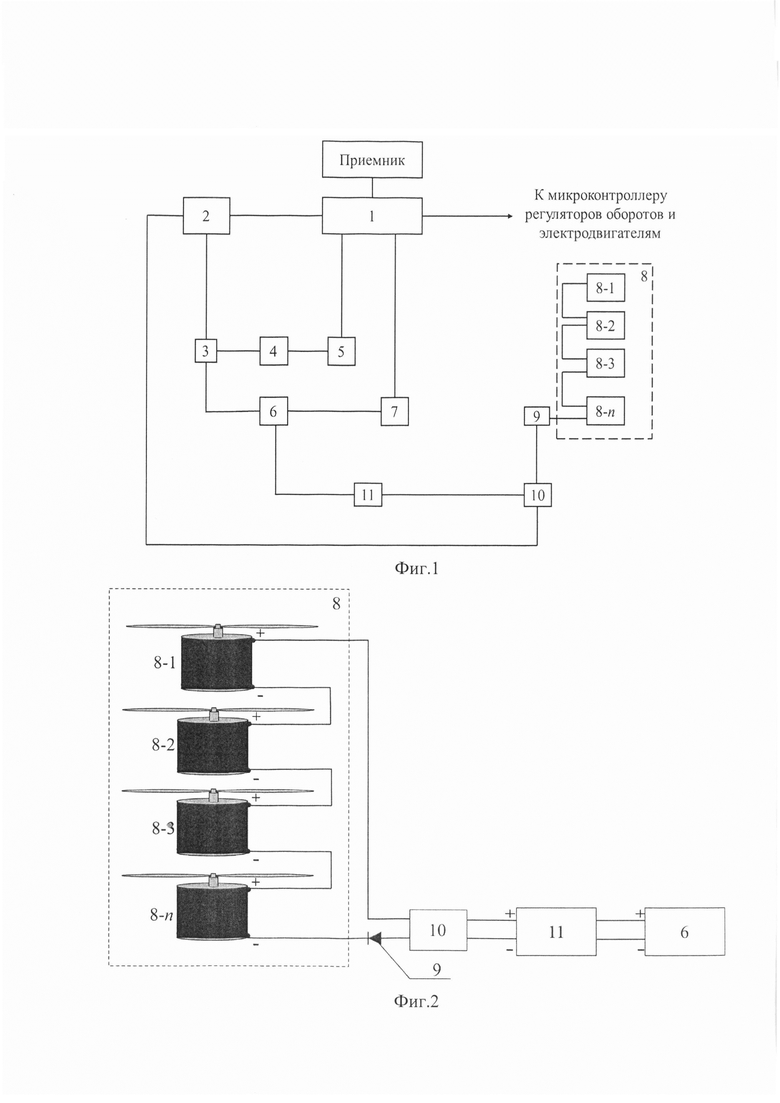
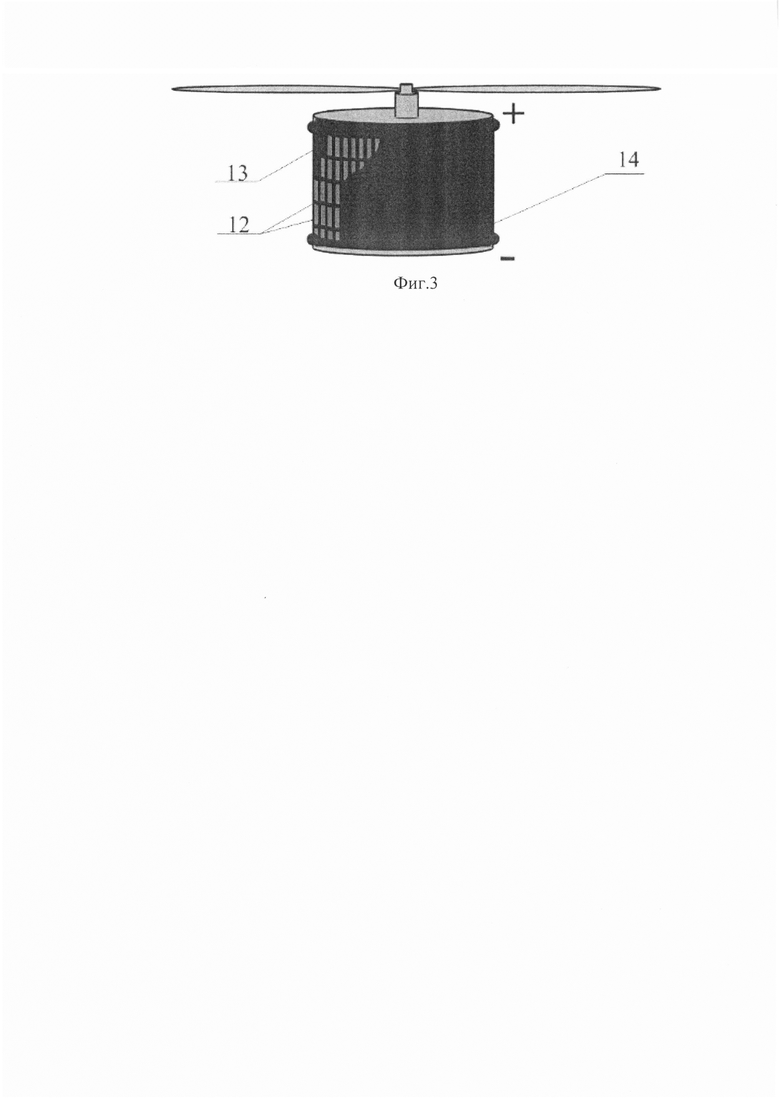
На фиг. 1 изображена структурная схема устройства. На фиг. 2 показана схема соединения гибких термоэлектрических генераторов. На фиг. 3 представлен внешний вид гибкого термоэлектрического генератора, размещенного на корпусе электродвигателя.
Устройство электропитания содержит (фиг. 1): полетный контроллер 1, микроконтроллер управления электронным реле и электронным ключом 2, электронное реле 3, аккумуляторную батарею 4, понижающий DC-DC преобразователь 5, батарею параллельно соединенных суперконденсаторов, расположенную на плате-контроллере 6, повышающий импульсный DC-DC преобразователь с ограничителем выходного тока 7, батарею последовательно соединенных гибких термоэлектрических генераторов 8, количеством равным количеству электродвигателей винтомоторных групп, защитный диод 9, электронный коммутационный ключ 10, повышающий импульсный DC-DC преобразователь 11.
Устройство работает следующим образом.
При включении беспилотного летательного аппарата мультироторного типа и нахождении его в исходном положении (не в режиме взлета, полета и т.д.) его питание осуществляется от аккумуляторной батареи 4 через понижающий DC-DC преобразователь 6 и полетный контроллер 1.
После задания определенной команды на пульте управления оператором мультироторного беспилотного летательного аппарата, она преобразуется в кодированный сигнал и поступает на приемник (не показан), который декодирует его и передает через разъем на полетный контроллер 1. Полетный контроллер 1 передает сигнал на микроконтроллер регулятора оборотов винтомоторной группы (не показан), который регулирует величины коммутированных токов в обмотках бесколлекторных двигателей в зависимости от требуемых частот вращения каждого двигателя. Полетный контроллер 1 имеет дополнительный разъем, через который он передает тот же сигнал, что и на микроконтроллер регулятора оборотов (не показан) на микроконтроллер управления электронным реле и электронным ключом 2, который преобразовывает сигналы, поступающие с полетного контролера на проведение определенного действия (общий газ, тангаж, крен, рысканье и т.д.) в сигналы управления электронным реле 3, кроме того электропитание электронного реле 3 осуществляется также через микроконтроллер управления электронного реле и электронным ключом 2.
Суть преобразования сигналов заключается в следующем: каждый режим работы мультироторного беспилотного летательного аппарата характеризуется потреблением мощностей, находящихся в определенных диапазонах, а микроконтроллер и электронным ключом 2 группирует эти диапазоны по двум режимам потребления мощности электродвигателями: режим потребления номинальной мощности и режим потребления пиковой мощности и преобразует их в два управляющих сигнала соответственно. При этом сигнал с полетного контроллера 1 вначале поступает на микроконтроллер управления электронным реле и электронным ключом 2, а затем на микроконтроллер регулятора оборотов (не показан).
При поступлении сигнала с микроконтроллера управления электронным реле и электронным ключом 2, соответствующего работе электродвигателей в номинальном режиме, он подает сигнал на управляющие контакты электронного реле 3 и замыкает первую группу рабочих контактов и питание полетного контроллера 1 осуществляется аккумуляторной батарей 4 через понижающий импульсный DC-DC преобразователь 5. Понижающий импульсный DC-DC преобразователь 5 служит для понижения и стабилизации выходного напряжения аккумуляторной батареи 4 до уровней необходимых для нормального функционирования полетного контролера 1 и регулятора оборотов (не показан).
При поступлении сигнала с микроконтроллера управления электронным реле и электронным ключом 2, соответствующего работе электродвигателей в режиме потребления пиковой мощности, он подает сигнал на управляющие контакты электронного реле 3 и размыкает первую группу рабочих контактов, и замыкает вторую группу рабочих контактов и питание полетного контроллера 1 осуществляется от батареи параллельно соединенных суперконденсаторов 6 через повышающий импульсный DC-DC преобразователь с ограничителем выходного тока 7. Повышающий импульсный DC-DC преобразователь с ограничителем выходного тока 7 служит для повышения и стабилизации выходного напряжения с батареи суперконденсаторов и ограничения выходного тока, до уровней необходимых для нормального функционирования полетного контролера 1 и регулятора оборотов (не показан). Плата-контроллер служит для балансировки сопротивлений параллельно соединенных суперконденсаторов.
К наружным боковым поверхностям электродвигателей винтомоторных групп по всем площадям их боковых поверхностей на расстоянии обеспечивающим их максимальную контактную площадь, прилегают гибкие термоэлектрические генераторы 8-1…8-n количеством равным количеству электродвигателей соответственно, подключенные между собой последовательно и образующие собой батарею гибких термоэлектрических генераторов 8.
Последовательное соединение гибких термоэлектрических генераторов в 8-1…8-n (фиг. 2) обусловлено тем, что выходные напряжения каждого из указанных генераторов не равны между собой, поэтому при их совместной работе на общую нагрузку генератор с наибольшим выходным напряжением будет нагружен больше других, что приведет к его перегреву и выходу из строя, кроме того суммарное КПД указанной батареи будет сниженным. При последовательном соединении термоэлектрических генераторов их выходные напряжения суммируются и необходимость их выравнивания устраняется.
Защитный диод 9 служит для защиты батареи гибких термоэлектрических генераторов от возникновения обратных токов.
Электронный коммутационный ключ 10 также управляется микроконтроллером управления электронным реле 2 и работает следующим образом:
1) при питании полетного контроллера 1 от батареи суперконденсаторов 6 электронный коммутационный ключ 10 находится в выключенном состоянии (разомкнут) и препятствует подаче напряжения с батареи гибких термоэлектрических генераторов 8 через повышающий DC-DC преобразователь 11 на батарею суперконденсаторов 6, расположенную на плате контроллере;
2) при переходе в режим потребления электродвигателями номинальной мощности микроконтроллер управления электронным реле и электронным ключом 2 подает первый сигнал на электронное реле 3 на переход электропитания от аккумуляторной батареи 4 и следом второй сигнал на электронный ключ 10, который включается (замыкается) и с батареи гибких термоэлектрических генераторов 8 через повышающий импульсный DC-DC преобразователь 11 осуществляется заряд батареи суперконденсаторов, расположенной на плате-контроллере. Повышающий импульсный DC-DC преобразователь 11 служит для повышения выходного напряжения от батареи гибких термоэлектрических генераторов 8 до уровня необходимого для заряда батареи суперконденсаторов 6.
Гибкие термоэлектрические генераторы подробно описаны в научных статьях [4, 5]. Основу конструкции гибкого термоэлектрического генератора (фиг. 3) составляют последовательно соединенные термопары 12, состоящие из двух разнородных полупроводниковых элементов p-, n-типа, расположенных между внутренней пластиной из органического электропроводного полимера 13, прилегающей к боковой поверхности электродвигателя (не показан), и внешней пластиной из органического электропроводного полимера 14. При этом горячий спай, размещается у боковых поверхностей электродвигателей, а холодный спай - в направлении окружающей среды. Так, тепловая энергия, выделяемая при работе электродвигателей, преобразуется в электрическую.
Таким образом, в предложенном устройстве используются: свойства суперконденсаторов, а именно:
способность отдавать пиковую мощность в требуемом количестве, что позволит экономить уровень заряда аккумуляторной, значительно снижающегося при пиковых токовых нагрузках;
способность достаточно быстро накапливать заряд, что позволяет использовать для их заряда гибкие термоэлектрические генераторы, преобразующие за счет эффекта Зеебека тепловую энергию электродвигателей в электрическую энергию.
Источники информации
[1] https://russiandrone.ru/publications/coderzhanie-i-razvitie-kontseptsii-privyazannyy-bespilotnyy-letatelnyy-apparat/?.
[2] Патент РФ RU 2683133 «Беспилотный привязной авиационный комплекс» от 26.03.2019 / М. Левчук, С. Левчук, С. Воскресенский.
[3] Патент РФ RU 2655113 «Устройство для обеспечения электроэнергией мультироторного летательного аппарата через буксируемый внешний источник энергии» от 23.05.2018 / П. Васильев.
[4] https://www.sciencedirect.com/science/article/abs/pii/S0306261917307420.
[5] https://www.science.org/doi/10.1126/sctadv.abe0586.
| название | год | авторы | номер документа |
|---|---|---|---|
| Малогабаритное бортовое радиоэлектронное устройство для управления пилотажно-навигационным комплексом беспилотного летательного аппарата | 2021 |
|
RU2799748C2 |
| БЕСПИЛОТНОЕ ВОЗДУШНОЕ СУДНО МУЛЬТИРОТОРНОГО ТИПА (БВС) ДЛЯ ТРАНСПОРТИРОВКИ МАЛОГАБАРИТНЫХ ГРУЗОВ | 2023 |
|
RU2823830C1 |
| Система управления и передачи вращательного момента на винт(ы) в беспилотных летательных аппаратах (БПЛА), стартер-генератор, плата управления стартером-генератором и амортизатор для этой системы | 2020 |
|
RU2741136C1 |
| Беспилотный летательный аппарат вертолётного типа | 2022 |
|
RU2799689C1 |
| ТЕРМОЭЛЕКТРИЧЕСКАЯ ГЕНЕРАТОРНАЯ УСТАНОВКА ДЛЯ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2022 |
|
RU2788970C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПИТАНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2021 |
|
RU2779934C1 |
| Беспилотный летательный аппарат для обработки пестицидами садовых деревьев и кустарников | 2023 |
|
RU2808292C1 |
| Способ накопления и стабилизации вырабатываемого напряжения бесколлекторным генератором в составе гибридной силовой установки | 2018 |
|
RU2708118C1 |
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ АЭРОДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ВОЗДУШНЫХ ПОТОКОВ ПРИ ИСПОЛЬЗОВАНИИ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ МУЛЬТИРОТОРНОГО ТИПА | 2023 |
|
RU2812920C1 |
| Система посадки беспилотного летательного аппарата вертикального взлета и посадки | 2024 |
|
RU2837679C1 |
Изобретение относится к области электротехники и может быть использовано для электропитания бортовой аппаратуры, а также двигателей электропривода беспилотных летательных аппаратов мультироторного типа. Устройство электропитания мультироторного беспилотного летательного аппарата содержит полетный контроллер, микроконтроллер управления электронным реле и электронным ключом, электронное реле, аккумуляторную батарею, понижающий DC-DC преобразователь, батарею параллельно соединенных суперконденсаторов, расположенную на плате-контроллере, повышающий импульсный DC-DC преобразователь с ограничителем выходного тока, батарею последовательно соединенных гибких термоэлектрических генераторов количеством, равным количеству электродвигателей винтомоторных групп, защитный диод, электронный коммутационный ключ, повышающий импульсный DC-DC преобразователь, соединенные определенным образом. Обеспечивается повышение продолжительности полета беспилотного летательного аппарата мультироторного типа. 3 ил.
Устройство электропитания мультироторного беспилотного летательного аппарата, содержащее полетный контроллер, аккумуляторную батарею, понижающий DC-DC преобразователь, отличающееся тем, что в него дополнительно введены микроконтроллер управления электронным реле и электронным ключом, электронное реле, батарея параллельно соединенных суперконденсаторов, расположенная на плате-контроллере, повышающий импульсный DC-DC преобразователь с ограничителем выходного тока, батарея последовательно соединенных гибких термоэлектрических генераторов, защитный диод, электронный коммутационный ключ, повышающий импульсный DC-DC преобразователь, причем вход микроконтроллера управления электронным реле соединен прямой связью с выходом полетного контроллера, а выход в свою очередь соединен прямой связью с управляющими и питающими контактами электронного реле, первая группа рабочих контактов которого соединена прямой связью с контактами аккумуляторной батареи, а вторая группа рабочих контактов электронного реле соединена прямой связью с контактами батареи параллельно соединенных суперконденсаторов, расположенной на плате-контроллере, контакты которой в свою очередь соединены прямой связью с входом повышающего импульсного DC-DC преобразователя с ограничителем выходного тока, выход которого соединен прямой связью с входом полетного контроллера; батарея последовательно соединенных гибких термоэлектрических генераторов расположена вокруг боковых поверхностей корпусов электродвигателей винтомоторных групп, контакты которой соединены прямой связью через последовательно соединенный с отрицательным полюсом контакта батареи гибких термоэлектрических генераторов защитный диод с входом повышающего импульсного DC-DC преобразователя через электронный коммутационный ключ, соединенный прямой связью с выходом микроконтроллера управления электронным реле и электронным ключом, при этом выход повышающего импульсного DC-DC преобразователя соединен прямой связью с контактами батареи параллельно соединенных суперконденсаторов, расположенной на плате-контроллере.
| СИСТЕМА УПРАВЛЕНИЯ ПИТАНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2021 |
|
RU2779934C1 |
| САМОУСТАНАВЛИВАЮЩАЯСЯ ДВУХКОНСОЛЬНАЯ ФЕРМА ДЛЯ ДОЖДЕВАЛЬНЫХ, ОПРЫСКИВАТЕЛЬНЫХ и т. п. МАШИН | 0 |
|
SU212660A1 |
| US 20210403158 A1, 30.12.2021 | |||
| US 11228200 B2, 18.01.2022 | |||
| CN 111864891 A, 30.10.2020. | |||

