Область техники, к которой относится изобретение
Изобретение относится к области сварочной техники, в частности, к гусеничному сварочному роботу.
Уровень техники
С развитием робототехники и сварочных технологий в области сварки металлоконструкций гусеничные сварочные роботы обычно применяют для сварки стальных резервуаров, сферических резервуаров и оборудования для дугообразной поверхности трубопровода. В настоящее время существует тип гусеничного сварочного робота, который приводится в движение гусеничным ходовым механизмом и перемещается по свариваемой поверхности. Тем не менее, если форма свариваемой поверхности отличается от плоскости, в частности, соответствует дуге или сфере, гусеничный ходовой механизм гусеничного сварочного робота обычно не может полностью соприкасаться со свариваемой поверхностью, что затрудняет управление направлением движения сварочного робота и даже приводит к соскальзыванию или падению гусеничного сварочного робота со свариваемой поверхности.
Раскрытие сущности изобретения
Задачей настоящего изобретения является разработка гусеничного сварочного робота, лишенного недостатков уровня техники, связанных с тем, что направление движения гусеничного сварочного робота трудно контролировать при перемещении по свариваемой поверхности, форма которой отличается от плоскости, и даже возможно соскальзывание или падение робота со свариваемой поверхности.
Поставленная задача решена гусеничным сварочным роботом, предназначенным для медленного движения по свариваемому изделию и его сварки, содержащим шасси, два гусеничных ходовых механизма, присоединенных к двум противоположным сторонам шасси соответственно, и сварочную горелку, присоединенную к шасси и используемую для сварки, причем каждый гусеничный ходовой механизм содержит держатель катков, первую звездочку и вторую звездочку, присоединенные с возможностью вращения к двум концам держателя катков соответственно, и гусеницу, расположенную вокруг первой звездочки и второй звездочки, причем два держателя катков двух гусеничных ходовых механизмов присоединены с возможностью перемещения к противоположным сторонам шасси, соответственно.
Кроме того, гусеничный сварочный робот содержит шарниры, посредством которых два гусеничных ходовых механизма соединены с шасси, причем шарниры присоединены с возможностью вращения к держателю катков и/или шасси, и каждый шарнир имеет ось вращения, ориентированную в направлении движения гусеничных ходовых механизмов.
Кроме того, гусеничный сварочный робот дополнительно содержит модуль наблюдения за ванной расплава, предназначенный для контроля за условиями сварки сварочной горелкой; модуль наблюдения за ванной расплава содержит камеру для фотографирования ванны расплава и экран для защиты от брызг, содержащий первый экранирующий элемент с первым светопропускающим отверстием и светопропускающую перегородку, расположенную между первым экранирующим элементом и камерой и закрывающую первое светопропускающее отверстие для защиты от брызг; камера выполнена с возможностью фотографирования ванны расплава через первое светопропускающее отверстие; светопропускающая перегородка имеет площадь, по меньшей мере вдвое превышающую площадь первого светопропускающего отверстия, и выполнена с возможностью перемещения относительно первого светопропускающего отверстия, что позволяет закрывать первое светопропускающее отверстие различными зонами светопропускающей перегородки.
Кроме того, модуль наблюдения за ванной расплава дополнительно содержит вращающийся вал, к которому с возможностью вращения присоединена светопропускающая перегородка.
Кроме того, экран дополнительно содержит второй экранирующий элемент, расположенный между первым экранирующим элементом и камерой, причем второй экранирующий элемент содержит второе светопропускающее отверстие, расположенное напротив первого светопропускающего отверстия, причем камера выполнена с возможностью фотографирования ванны расплава через первое светопропускающее отверстие и второе светопропускающее отверстие, причем первое светопропускающее отверстие и второе светопропускающее отверстие совместно определяют пространство между ними, внутри которого расположена светопропускающая перегородка, причем вращающийся вал соединен с первым и/или вторым экранирующим элементом.
Кроме того, светопропускающая перегородка имеет цилиндрическую форму, вращающийся вал присоединен с возможностью вращения к центру светопропускающей перегородки, а пространство содержит выемку, в которой открыта светопропускающая перегородка.
Кроме того, гусеничный сварочный робот дополнительно содержит магнитные притягивающие устройства для притягивания свариваемого изделия и подъемные механизмы, установленные на шасси и выполненные с возможностью подъема и опускания магнитных притягивающих устройств, причем шасси содержит сквозные отверстия, подъемный механизм содержит регулировочный винт, проходящий через сквозное отверстие и соединенный одним концом с магнитным притягивающим устройством, и регулировочную гайку, расположенную на стороне шасси, удаленной от магнитного притягивающего устройства и соединенную на резьбе с регулировочным винтом, причем подъемный механизм дополнительно содержит кольцевой стопор, установленный на шасси без возможности смещения и выполненный с возможностью ограничения вращения регулировочного винта.
Кроме того, кольцевой стопор содержит зажимное отверстие и расположен вокруг регулировочного винта, причем зажимное отверстие имеет D-образную форму и зажимает внешнюю периферийную поверхность регулировочного винта для ограничения вращения регулировочного винта, причем регулировочный винт содержит скользящий соединительный участок, взаимодействующий с зажимным отверстием с возможностью скольжения, причем форма поперечного сечения скользящего соединительного участка соответствует форме зажимного отверстия, то есть D-образной форме.
Кроме того, гусеничный ходовой механизм дополнительно содержит первый механизм натяжения, соединенный с держателем катков и выполненный с возможностью регулировки натяжения гусеницы в первом направлении, и второй механизм натяжения, соединенный с держателем катков и выполненный с возможностью регулировки натяжения гусеницы во втором направлении, отличающемся от первого направления.
Кроме того, первое направление соответствует боковому направлению, совпадающему с направлением движения гусеничного ходового механизма, а второе направление соответствует продольному направлению, перпендикулярному боковому направлению.
Технические эффекты настоящего изобретения по сравнению с уровнем техники заключаются в том, что гусеничный сварочный робот, предложенный настоящим изобретением, содержит шасси и два гусеничных ходовых механизма, присоединенных к двум противоположным сторонам шасси соответственно, причем держатели катков двух гусеничных ходовых механизмов соединены с шасси с возможностью перемещения. Таким образом, когда гусеничный сварочный робот движется по свариваемой поверхности, форма которой отличается от плоскости, два гусеничных ходовых механизма могут произвольно регулировать свое положение относительно шасси для адаптации к форме свариваемой поверхности и улучшать степень прилегания двух гусеничных ходовых механизмов к свариваемой поверхности, что облегчает управление направлением перемещения гусеничного сварочного робота и уменьшает вероятность соскальзывания или падения гусеничного сварочного робота со свариваемой поверхности.
Краткое описание чертежей
Для разъяснения технических решений вариантов осуществления настоящего изобретения ниже кратко описаны чертежи, необходимые для понимания вариантов осуществления настоящего изобретения или известного уровня техники. Очевидно, что описанные ниже чертежи относятся только к некоторым вариантам осуществления изобретения. Специалисты в данной области техники на основании этих чертежей могут реализовать другие варианты осуществления, не прилагая творческих усилий.
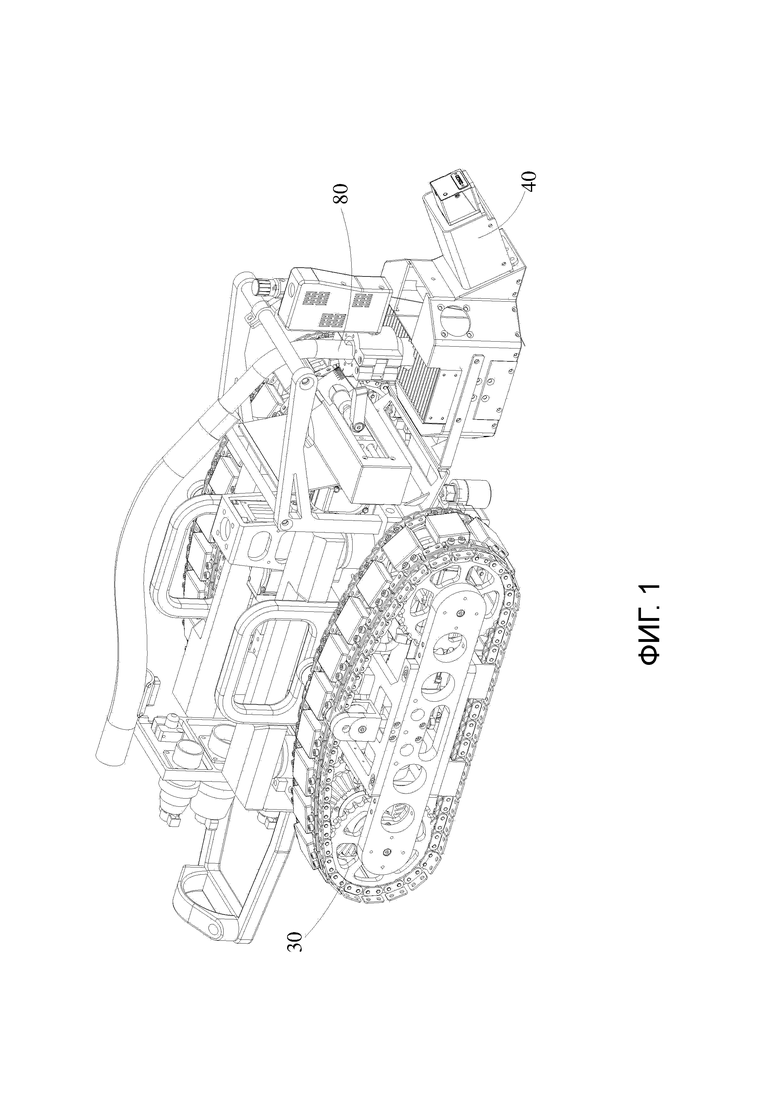
Фигура 1: вид в аксонометрии гусеничного сварочного робота согласно одному из вариантов осуществления настоящего изобретения.
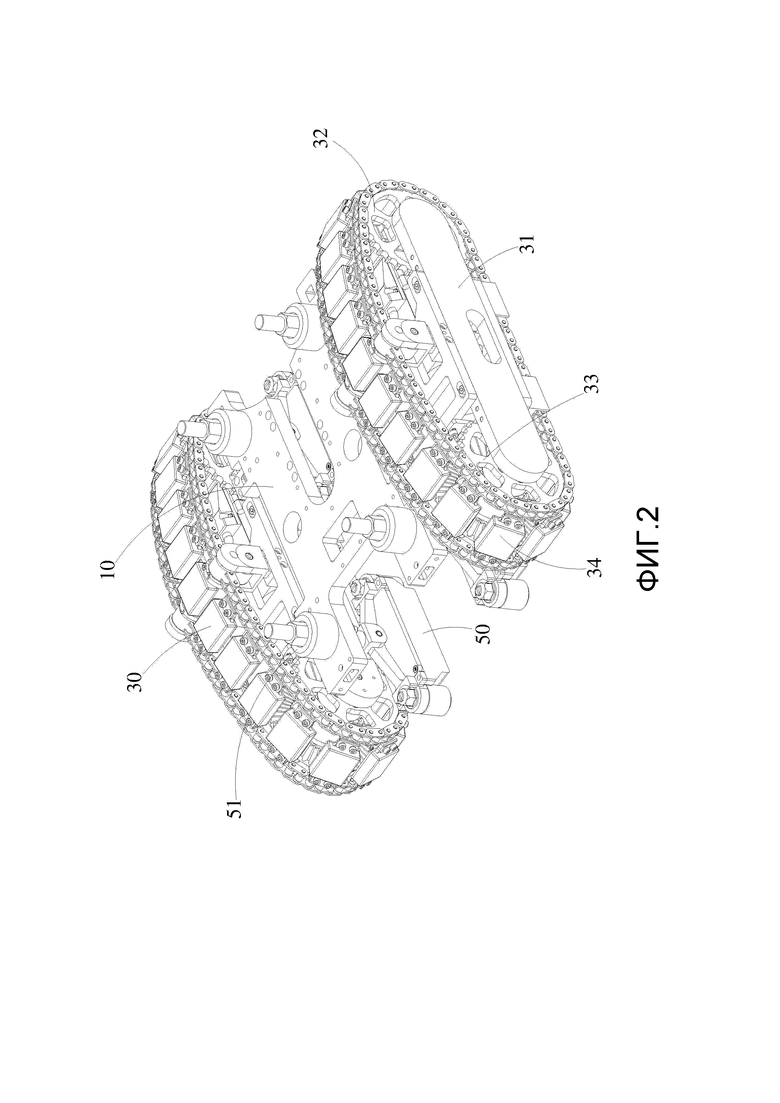
Фигура 2: вид в аксонометрии гусеничного сварочного робота согласно одному из вариантов осуществления настоящего изобретения.
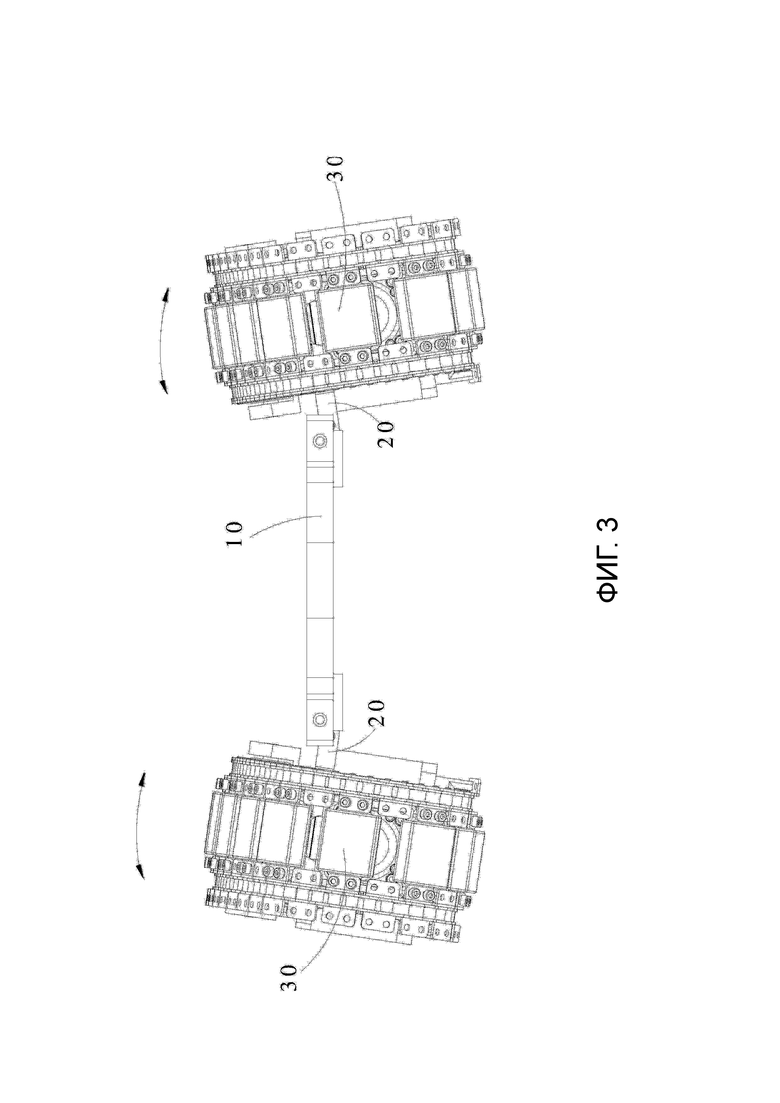
Фигура 3: вид в аксонометрии гусеничного сварочного робота согласно одному из вариантов осуществления настоящего изобретения.
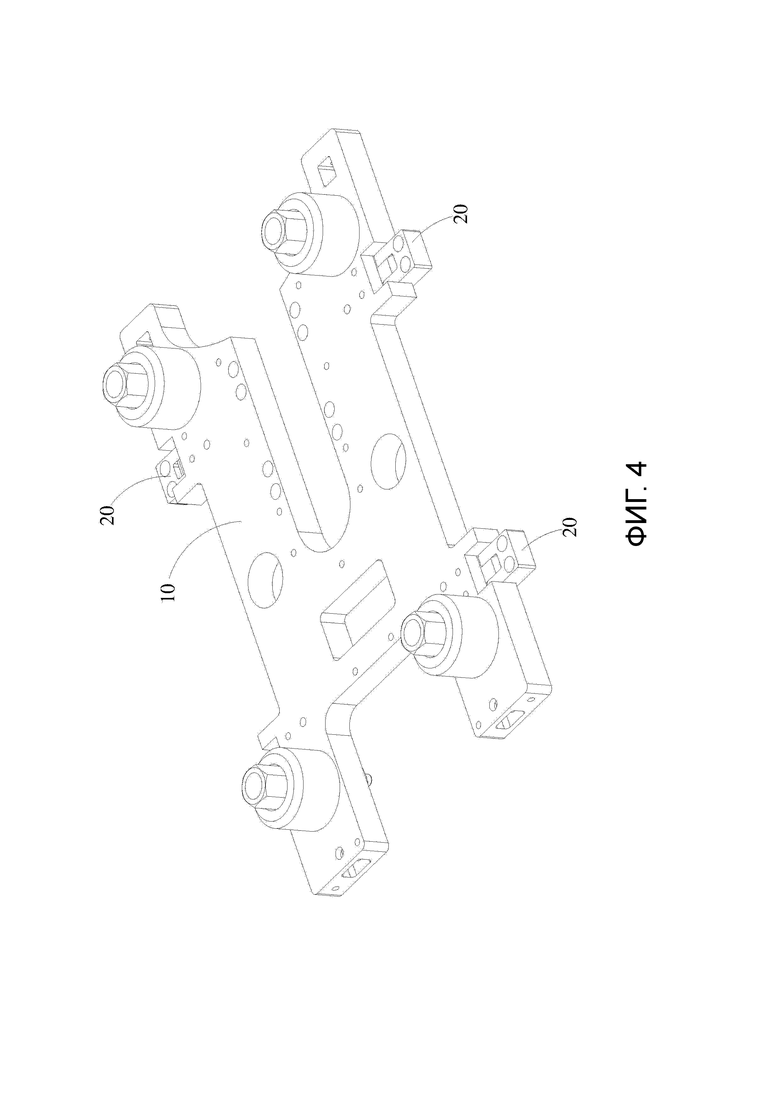
Фигура 4: вид в аксонометрии шасси согласно одному из вариантов осуществления настоящего изобретения.
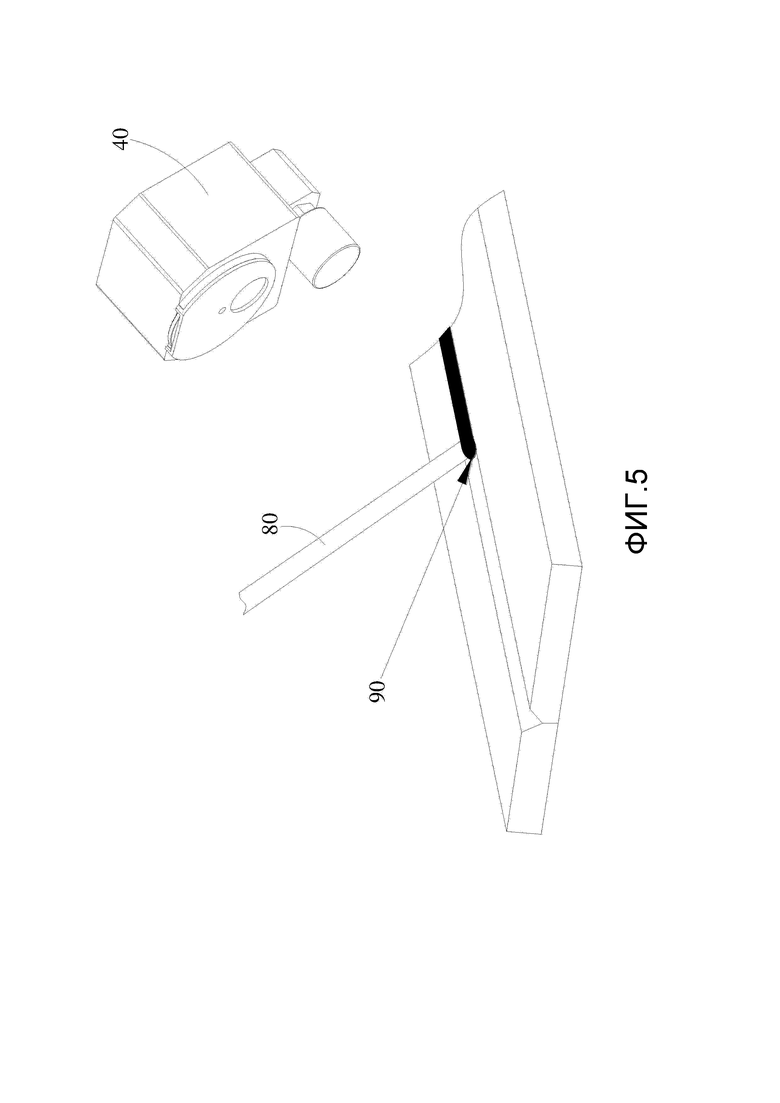
Фигура 5: схема, на которой изображено состояние использования модуля наблюдения за ванной расплава согласно одному из вариантов осуществления настоящего изобретения.
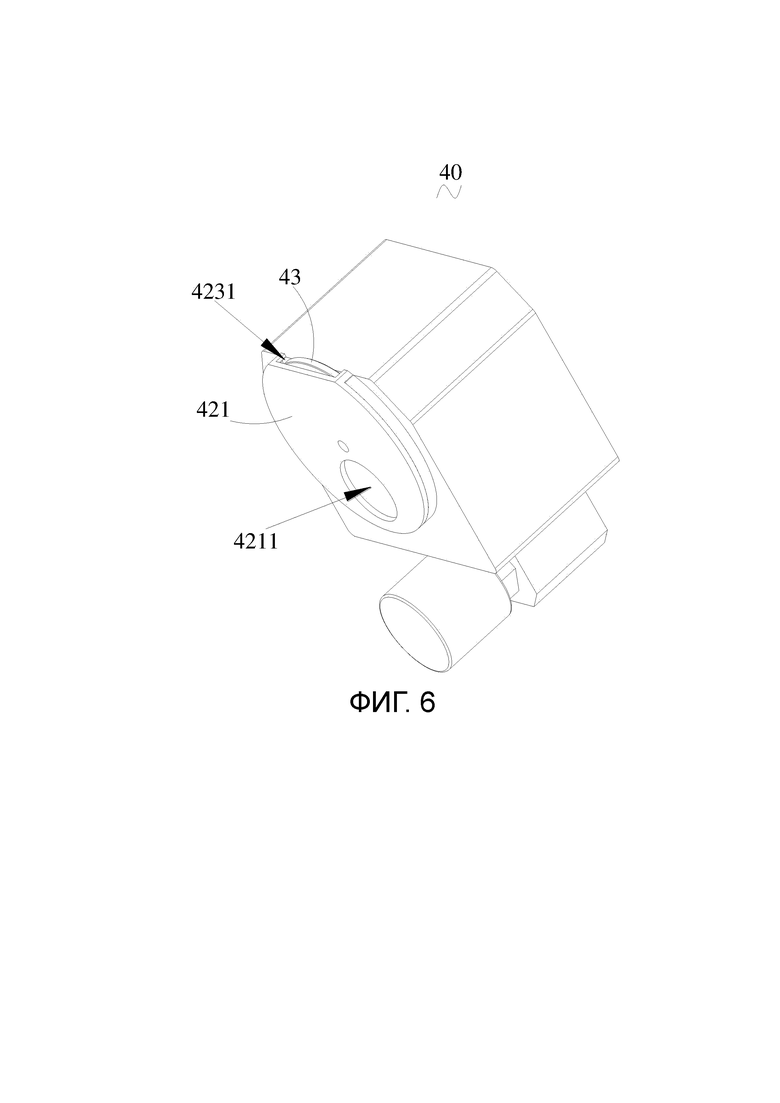
Фигура 6: вид в аксонометрии модуля наблюдения за ванной расплава согласно одному из вариантов осуществления настоящего изобретения.
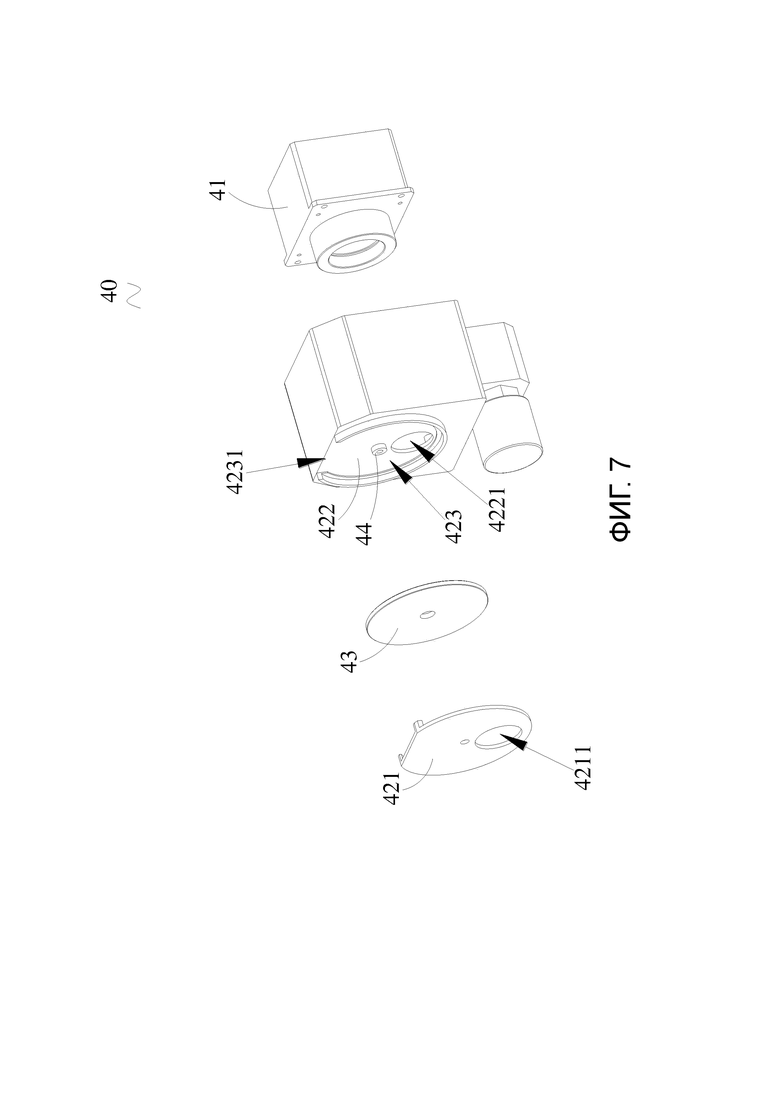
Фигура 7: покомпонентный вид модуля наблюдения за ванной расплава согласно одному из вариантов осуществления настоящего изобретения.
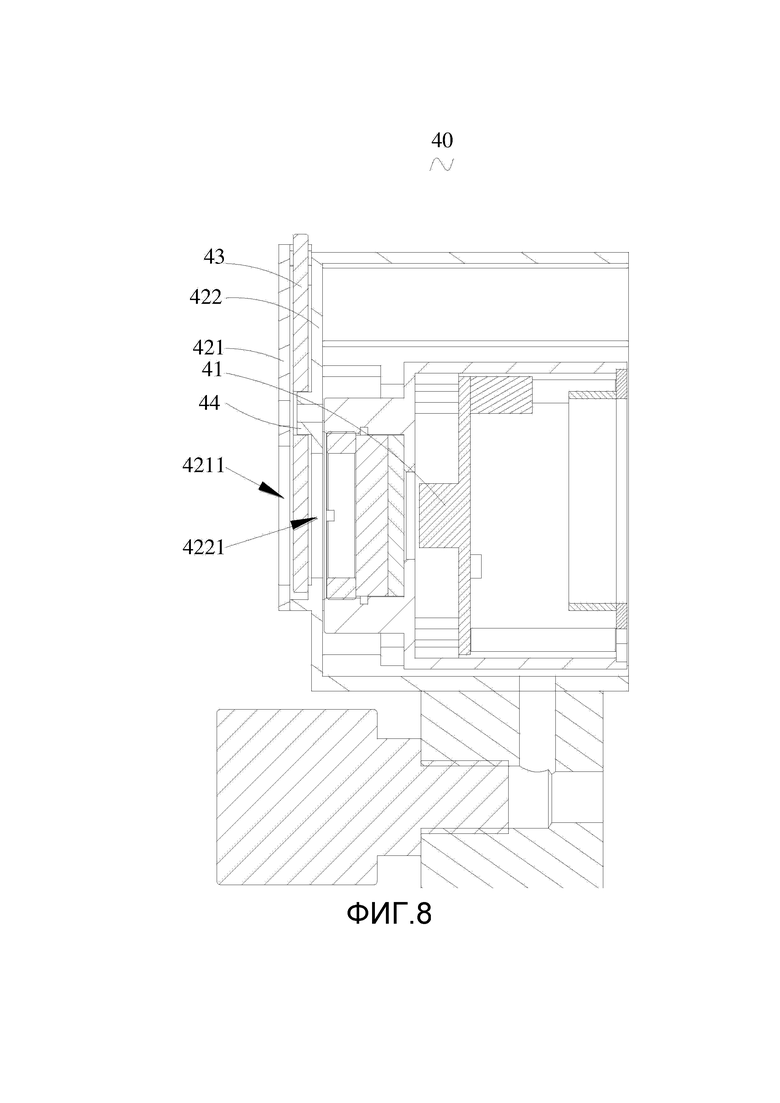
Фигура 8: поперечное сечение модуля наблюдения за ванной расплава согласно одному из вариантов осуществления настоящего изобретения.
Фигура 9: вид в аксонометрии светопропускающей перегородки согласно одному из вариантов осуществления настоящего изобретения.
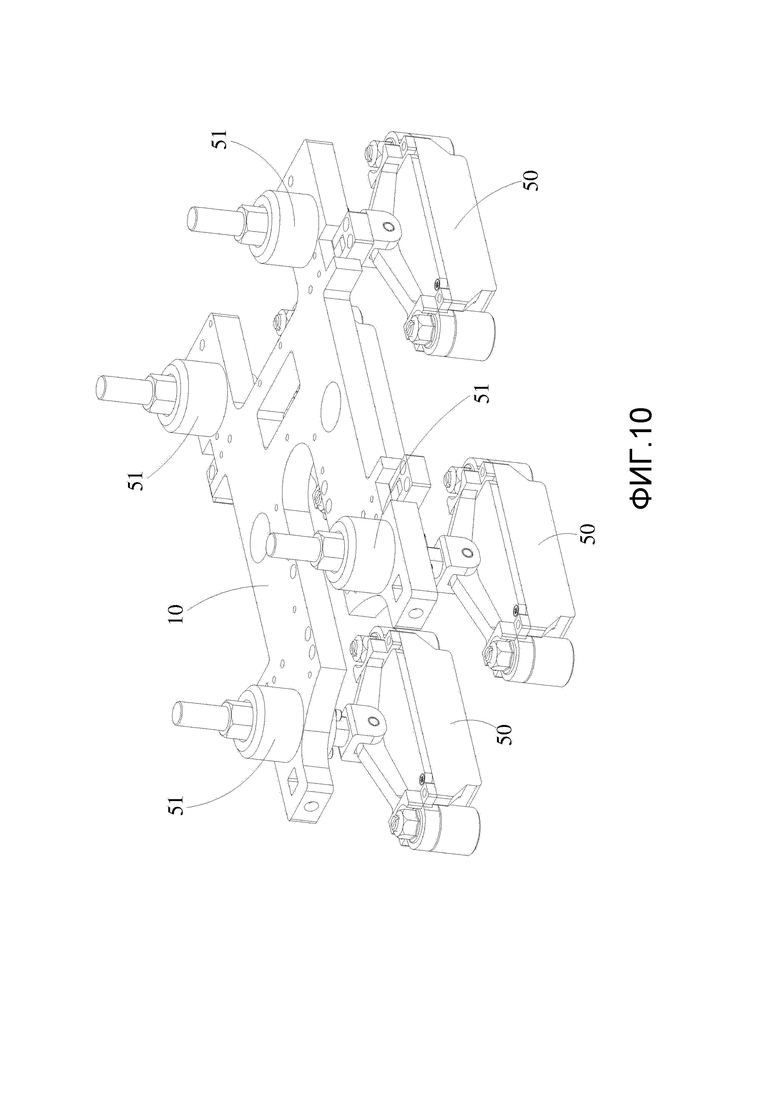
Фигура 10: схема установки магнитного притягивающего устройства и шасси согласно одному из вариантов осуществления настоящего изобретения.
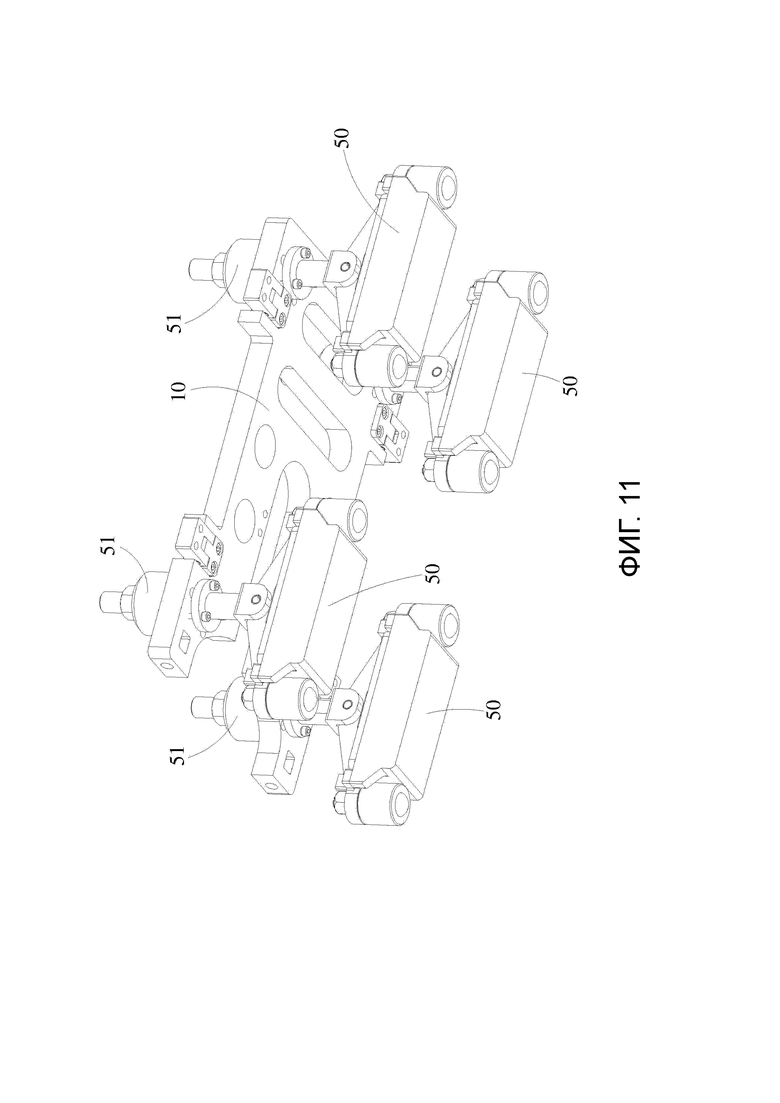
Фигура 11: схема установки магнитного притягивающего устройства и шасси согласно одному из вариантов осуществления настоящего изобретения.
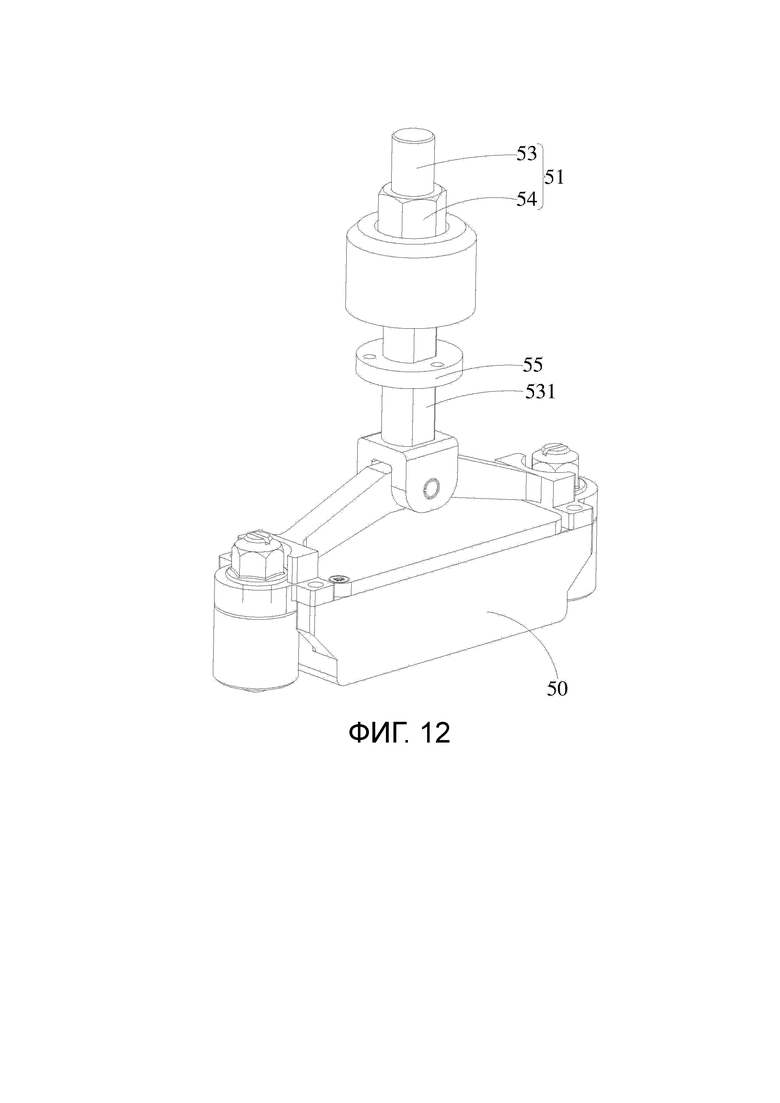
Фигура 12: схема установки подъемного механизма и магнитного притягивающего устройства согласно одному из вариантов осуществления настоящего изобретения.
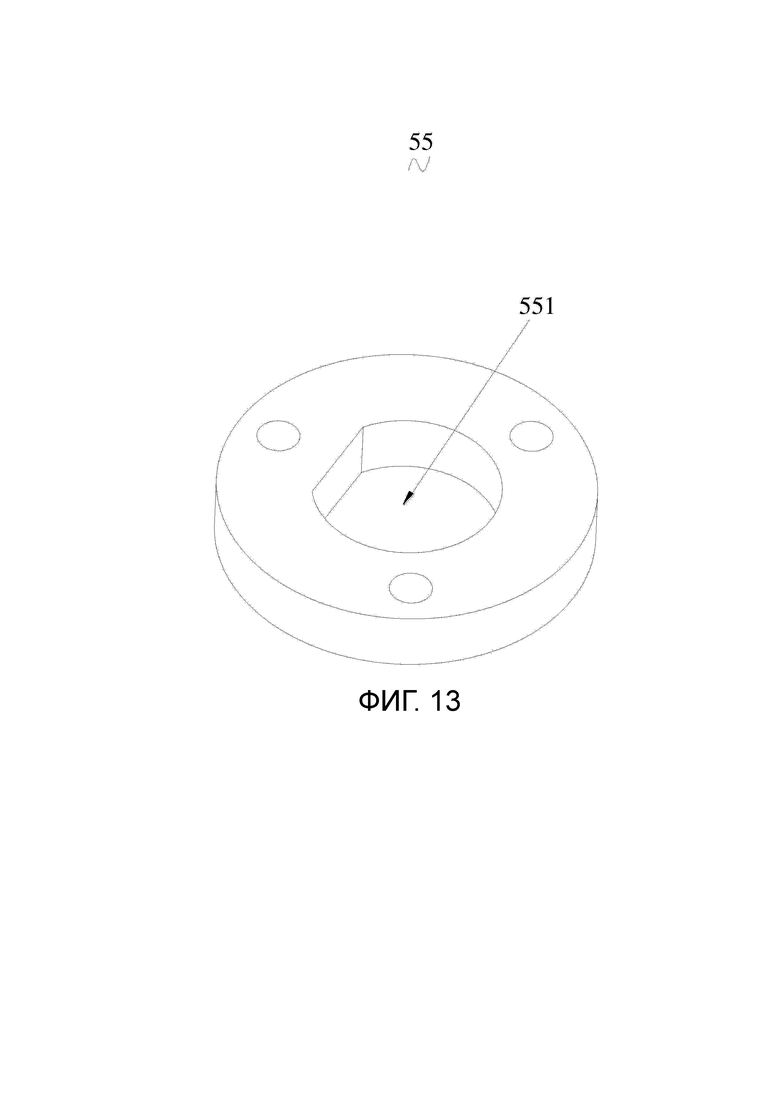
Фигура 13: вид в аксонометрии кольцевого стопора согласно одному из вариантов осуществления настоящего изобретения.
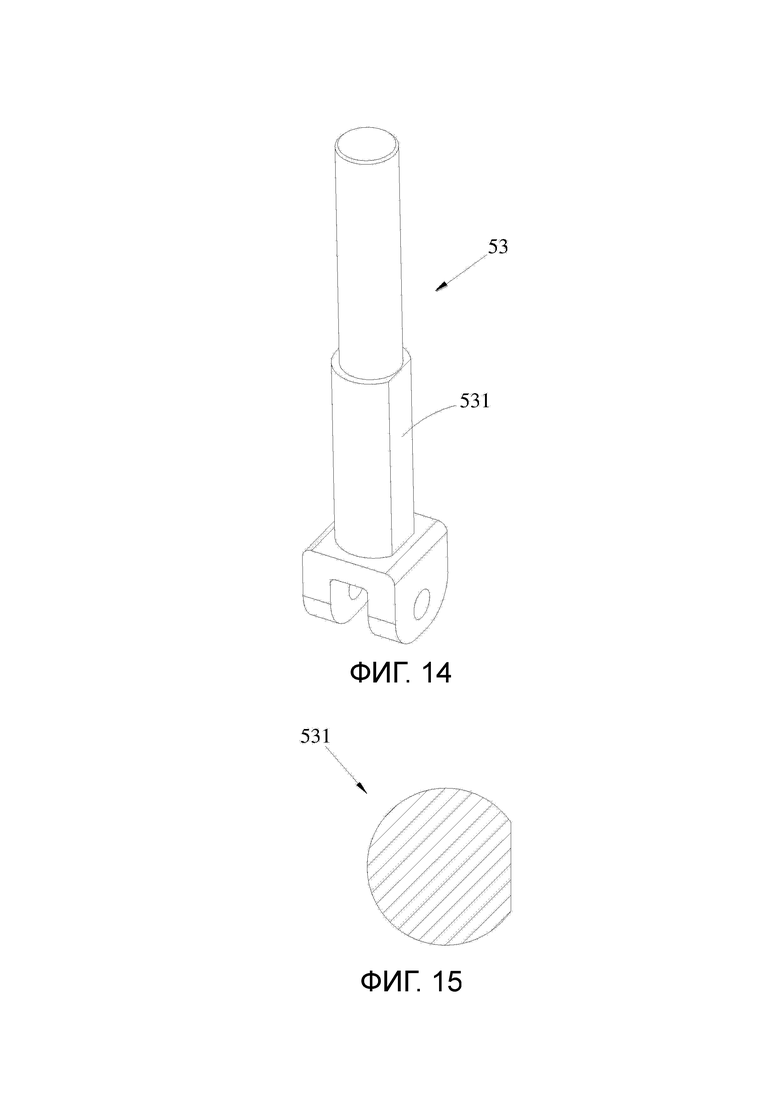
Фигура 14: вид в аксонометрии регулировочного винта согласно одному из вариантов осуществления настоящего изобретения.
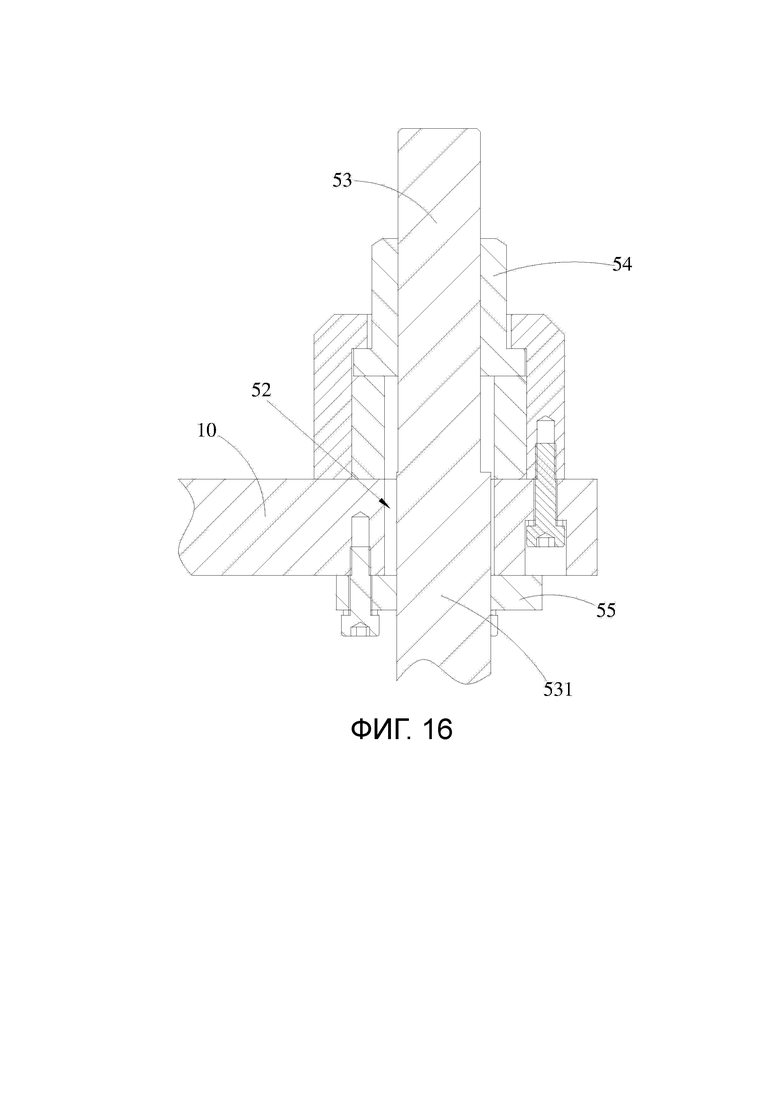
Фигура 15: поперечное сечение скользящего соединительного участка согласно одному из вариантов осуществления настоящего изобретения.
Фигура 16: покомпонентный вид подъемного механизма согласно одному из вариантов осуществления настоящего изобретения.
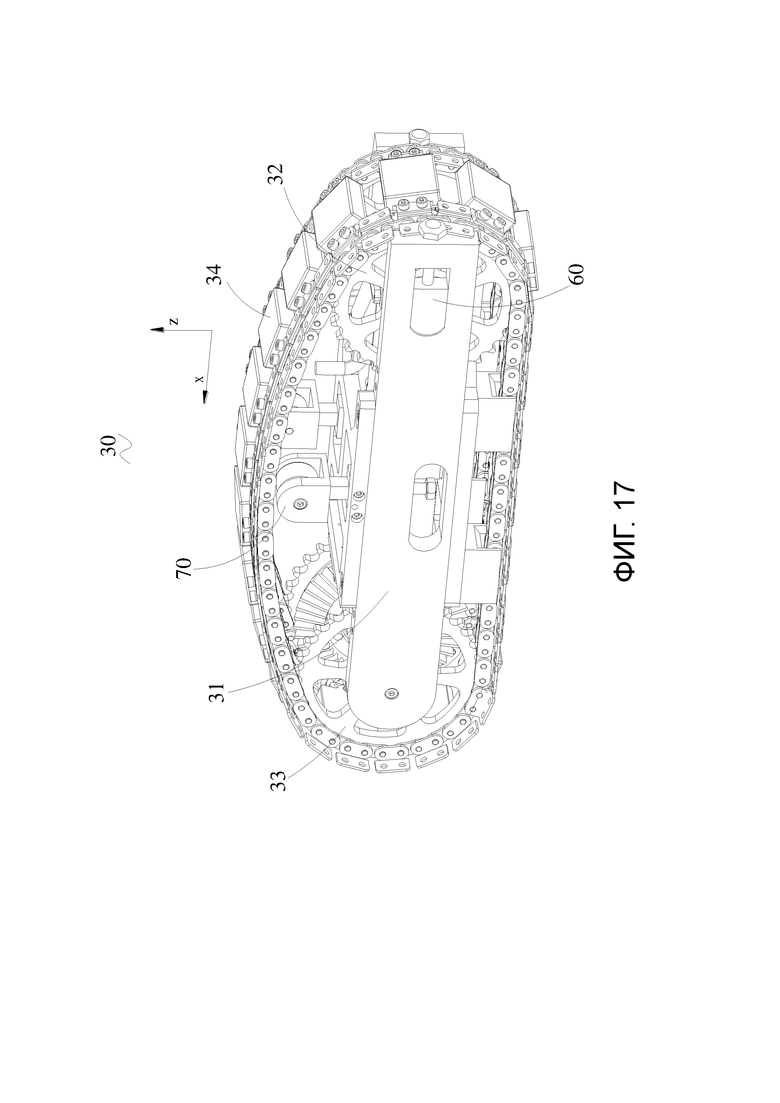
Фигура 17: вид в аксонометрии гусеничного ходового механизма согласно одному из вариантов осуществления настоящего изобретения.
Осуществление изобретения
Здесь и далее будут подробно раскрыты варианты осуществления настоящего изобретения. Примеры вариантов осуществления показаны на чертежах, причем одинаковые или подобные ссылочные обозначения относятся к одинаковым или подобным элементам или элементам, имеющим одинаковые или подобные функции. Варианты осуществления, раскрытые ниже со ссылкой на сопроводительные чертежи, приведены для примера, предназначены для интерпретации настоящего изобретения и не должны интерпретироваться как ограничивающие объем настоящего изобретения.
Если в раскрытии настоящего изобретения указано, что элемент «закреплен» или «расположен» на другом элементе, он может быть закреплен или расположен на другом элементе непосредственно или опосредованно. Если указано, что элемент «присоединен к» другому элементу, он может быть присоединен к другому элементу непосредственно или опосредованно.
Следует понимать, что такие термины, как «длина», «ширина», «верхний», «нижний», «передний», «задний», «левый», «правый», «вертикальный», «горизонтальный», «сверху», «снизу», «внутренний», «внешний», указывают на ориентацию или взаимное расположение на основании ориентации, или взаимное расположение на чертежах и предназначены только для облегчения понимания и упрощения раскрытия настоящего изобретения; они не указывают и не подразумевают, что устройства или элементы должны иметь определенную ориентацию или сконструированы и работают в определенной ориентации, то есть, не должны интерпретироваться как ограничение объема настоящего изобретения.
Кроме того, термины «первый» и «второй» используются только в целях описания и не могут быть интерпретированы как указывающие или подразумевающие относительную важность или косвенно указывающие на количество указанных технических признаков. Таким образом, признаки, определяемые терминами «первый» и «второй», могут явно или неявно включать один или несколько указанных признаков. В раскрытии настоящего изобретения «несколько» означает два и более, если не указано иное.
Специалисты в данной области техники могут понимать значения вышеуказанных терминов в раскрытии настоящего изобретении в зависимости от конкретных ситуаций.
Для понимания целей, технических решений и преимуществ настоящего изобретения ниже приведено подробное раскрытие настоящего изобретения со ссылкой на сопроводительные чертежи и варианты осуществления.
Как показано на фиг. 1-4, гусеничный сварочный робот согласно одному из вариантов осуществления настоящего изобретения применяют для медленного перемещения по свариваемому изделию и его сварки. Гусеничный сварочный робот содержит шасси 10, два гусеничных ходовых механизма 30, присоединенные к двум противоположным сторонам шасси 10 соответственно, и сварочную горелку 80, присоединенную к шасси 10 и используемую для сварки. Гусеничный ходовой механизм 30 содержит держатель 31 катков, первую звездочку 32 и вторую звездочку 33, соединенные с возможностью вращения с обоими концами держателя 31 катков, соответственно, и гусеницу 34, расположенную вокруг первой звездочки 32 и второй звездочки 33. Держатели 31 катков двух гусеничных ходовых механизмов 30, соответственно, присоединены к двум противоположным сторонам шасси 10 с возможностью перемещения.
Как показано на фиг. 1-4, гусеничный сварочный робот согласно одному из вариантов осуществления настоящего изобретения содержит шасси 10 и два гусеничных ходовых механизма 30, расположенные на двух противоположных сторонах шасси 10. Держатели 31 катков двух гусеничных ходовых механизмов 30 соединены с шасси 10 с возможностью перемещения, то есть, когда гусеничный сварочный робот движется по свариваемой поверхности, форма которой отличается от плоскости, два гусеничных ходовых механизма 30 могут произвольно регулировать свое положение относительно шасси 10 для адаптации к свариваемой поверхности и улучшения степени прилегания двух гусеничных ходовых механизмов 30 к свариваемой поверхности, что облегчает управление направлением перемещения гусеничного сварочного робота и снижает вероятность соскальзывания или падения гусеничного сварочного робота со свариваемой поверхности.
Как показано на фиг. 1-4, гусеничный сварочный робот дополнительно содержит шарниры 20, посредством которых два держателя 31 катков присоединены к шасси 10. Шарниры 20 соединены с возможностью вращения с держателями 31 катков и/или шасси 10. Оси вращения шарниров 20 ориентированы вдоль направления движения гусеничных ходовых механизмов 30. В варианте осуществления настоящего изобретения держатели 31 катков соединены с шасси 10 посредством шарниров 20. Шарниры 20 могут быть соединены с возможностью вращения только с держателями 31 катков, могут быть соединены с возможностью вращения только с шасси 10 или могут быть соединены с возможностью вращения с держателями 31 катков и шасси 10. Такая конструкция позволяет гусеничному ходовому механизму 30 изменять свое положение относительно шасси 10, а осям вращения шарниров 20 проходить вдоль направления движения гусеничного ходового механизма 30, то есть гусеничный ходовой механизм 30 может поворачиваться по вертикали относительно шасси 10, как показано на фиг. 3, для адаптации к различным свариваемым поверхностям, форма которых отличается от плоскости.
Как показано на фиг. 5-9, гусеничный сварочный робот дополнительно содержит модуль 40 наблюдения за ванной расплава, предназначенный для наблюдения за рабочим состоянием сварочной горелки 80. Модуль 40 наблюдения за ванной расплава содержит камеру 41, предназначенную для фотографирования ванны 90 расплава, и экран для защиты от брызг, причем экран содержит первый экранирующий элемент 421, содержащий первое светопропускающее отверстие 4211, и светопропускающую перегородку 43, расположенную между первым экранирующим элементом 421 и камерой 41 и закрывающую первое светопропускающее отверстие 4211 для защиты от брызг. Камера 41 фотографирует ванну 90 расплава через первое светопропускающее отверстие 4211. Светопропускающая перегородка 43 имеет площадь, по меньшей мере вдвое превышающую площадь первого светопропускающего отверстия 4211, и выполнена с возможностью перемещения относительно первого светопропускающего отверстия 4211, что позволяет закрывать первое светопропускающее отверстие 4211 различными зонами светопропускающей перегородки 43.
Как показано на фиг. 5-9, модуль 40 наблюдения за ванной расплава согласно одному из вариантов осуществления настоящего изобретения содержит камеру 41, первый экранирующий элемент 421, содержащий первое светопропускающее отверстие 4211, и светопропускающую перегородку 43, закрывающую первое светопропускающее отверстие 4211. Светопропускающая перегородка 43 имеет площадь, по меньшей мере вдвое превышающую площадь первого светопропускающего отверстия 4211, и выполнена с возможностью перемещения относительно первого светопропускающего отверстия 4211. Во время процесса сварки брызги проходят через первые светопропускающие отверстия 4211 и прилипают к стороне светопропускающей перегородки 43, обращенной к ванне 90 расплава, причем брызги прилипают только к той зоне светопропускающей перегородки 43, которая соответствует первому светопропускающему отверстию 4211. Когда количество налипших брызг достигает уровня, влияющего на качество фотографирования камеры 41, светопропускающую перегородку 43 можно переместить таким образом, чтобы другая зона светопропускающей перегородки 43, не содержащая налипших брызг, закрывала первое светопропускающее отверстие 4211, увеличивая светопропускание светопропускающей перегородки 43 и, тем самым, улучшая качество фотографирования камеры 41. В модуле 40 наблюдения за ванной расплава согласно одному из вариантов осуществления настоящего изобретения, когда количество брызг, налипших в зоне светопропускающей перегородки 43, соответствующей первому светопропускающему отверстию 4211, становится избыточным, светопропускающую перегородку 43 для продолжения операции сварки просто перемещают таким образом, чтобы с первым светопропускающим отверстием 4211 была совмещена чистая зона светопропускающей перегородки 43. Только после того, как будут загрязнены все зоны светопропускающей перегородки 43, потребуется очистить или заменить светопропускающую перегородку 43, что значительно сокращает частоту очистки или замены светопропускающей перегородки 43, снижает трудозатраты и повышает производительность.
На фиг. 5-9 видно, что светопропускающую перегородку 43 перемещают относительно первого светопропускающего отверстия 4211 посредством линейного, вращательного или иного движения до тех пор, пока чистая зона светопропускающей перегородки 43 не будет совмещена с первым светопропускающим отверстием 4211. Светопропускающую перегородку 43 можно перемещать вручную, электроприводом или иным способом. Светопропускающая перегородка 43 может пропускать весь спектр света или только свет с определенной длиной волны, пока камера 41 может фиксировать состояние сварки.
Как показано на фиг. 5-9, модуль 40 наблюдения за ванной расплава дополнительно содержит вращающийся вал 44, с которым с возможностью вращения соединена светопропускающая перегородка 43. В такой конфигурации светопропускающая перегородка 43 перемещается с возможностью вращения в одном из вариантов осуществления настоящего изобретения, что позволяет значительно сократить площадь, необходимую для установки светопропускающей перегородки 43, а также уменьшить размеры модуля 40 наблюдения за ванной расплава. В этом варианте осуществления изобретения отсутствуют ограничения на положение установки вращающегося вала 44 при условии, что светопропускающая перегородка 43 может вращаться вокруг него и перемещаться относительно первого светопропускающего отверстия 4211.
Как показано на фиг. 5-9, экран дополнительно содержит второй экранирующий элемент 422, расположенный между первым экранирующим элементом 421 и камерой 41. Второй экранирующий элемент 422 содержит второе светопропускающее отверстие 4221, расположенное напротив первого светопропускающего отверстия 4211. Камера 41 фотографирует ванну 90 расплава через первое светопропускающее отверстие 4211 и второе светопропускающее отверстие 4221. Между первым светопропускающим отверстием 4211 и вторым светопропускающим отверстием 4221 определено пространство 423, внутри которого расположена светопропускающая перегородка 43. Вращающийся вал 44 соединен с первым и/или вторым экранирующим элементом. В одном из вариантов осуществления настоящего изобретения, поскольку светопропускающая перегородка 43 размещена в пространстве 423, можно предотвратить загрязнение светопропускающей перегородки 43 внешними примесями, что позволит увеличить время использования светопропускающей перегородки 43 и сократить частоту ее очистки или замены, то есть снизить трудозатраты и повысить производительность.
Как показано на фиг. 5-9, светопропускающая перегородка 43 имеет цилиндрическую форму, а вращающийся вал 44 соединен с возможностью вращения с центром светопропускающей перегородки 43. Пространство 423 имеет зазор 4231, в котором открыта светопропускающая перегородка 43. В такой конфигурации, когда часть светопропускающей перегородки 43 открыта в выемке 4231 пространства 423, при необходимости поворота светопропускающей перегородки 43 достаточно надавить только на открытую часть светопропускающей перегородки 43, чтобы привести светопропускающую перегородку 43 во вращение с целью совмещения чистой зоны светопропускающей перегородки 43 с первым светопропускающим отверстием 4211. Это позволяет легко и быстро приводить в движение светопропускающую перегородку.
Как показано на фиг. 10-16, гусеничный сварочный робот дополнительно содержит магнитные притягивающие устройства 50 для притягивания свариваемого изделия и подъемные механизмы 51, расположенные на шасси 10 и выполненные с возможностью подъема и опускания магнитных притягивающих устройств 50. Шасси 10 содержит сквозные отверстия 52. Подъемный механизм 51 содержит регулировочный винт 53, проходящий через сквозное отверстие 52 и соединенный одним концом с магнитным притягивающим устройством 50, и регулировочную гайку 54, расположенную на стороне шасси 10, удаленной от магнитного притягивающего устройства 50 и соединенную на резьбе с регулировочным винтом 53. Подъемный механизм 51 также содержит кольцевой стопор 55, закрепленный на шасси 10 без возможности перемещения и предназначенный для ограничения вращения регулировочного винта 53.
Как показано на фиг. 10-16, в гусеничном сварочном роботе согласно одному из вариантов осуществления настоящего изобретения подъемный механизм 51 для подъема и опускания магнитного притягивающего устройства 50 содержит регулировочный винт 53 и регулировочную гайку 54, навинченную на регулировочный винт 53. Шасси 10 дополнительно содержит кольцевой стопор 55, способный ограничивать вращение регулировочного винта 53, то есть во время подъема и опускания магнитного притягивающего устройства 50 путем вращения гайки кольцевой стопор 55 может ограничивать вращение регулировочного винта 53 и обеспечивать перемещение регулировочного винта 53 только в осевом направлении, предотвращая тем самым некорректную регулировку подъема. Кроме того, поскольку кольцевой стопор 55 ограничивает вращение регулировочного винта 53, магнитное притягивающее устройство 50 также не может вращаться вместе с регулировочным винтом 53, что позволяет избежать технической проблемы, связанной с воздействием магнитного притягивающего устройства 50 на гусеничные ходовые механизмы 30 гусеничного сварочного робота, препятствующим движению гусеничного сварочного робота.
Как показано на фиг. 10-16, кольцевой стопор в одном из вариантов осуществления настоящего изобретения представляет собой элемент, выполненный с возможностью предотвращения вращения винта вдоль его осевого направления (то есть подъемного движения) в процессе вращения гайки. Очевидно, что регулировочный винт 53 и регулировочная гайка 54 имеют взаимно совпадающие резьбы. Когда гайку закручивают, регулировочный винт 53 может перемещаться вверх и вниз, тем самым опуская или поднимая магнитное притягивающее устройство 50. Магнитное притягивающее устройство 50 в одном из вариантов осуществления настоящего изобретения может представлять собой постоянный магнит или электромагнит.
Как показано на фиг. 10-16, кольцевой стопор 55 содержит зажимное отверстие 551 и расположен вокруг регулировочного винта 53. Зажимное отверстие 551 кольцевого стопора 55 зажимает внешнюю периферийную поверхность регулировочного винта 53 для ограничения вращения регулировочного винта 53. В частности, при завинчивании регулировочной гайки 54 зажимное отверстие 551 ограничивает вращение регулировочного винта 53, то есть винт перемещается вверх и вниз относительно шасси 10, а затем опускает или поднимает магнитное притягивающее устройство 50. В частности, зажимное отверстие 551 имеет D-образную форму, а регулировочный винт 53 содержит скользящий соединительный участок 531, взаимодействующий с зажимным отверстием 551 с возможностью скольжения. Поперечное сечение скользящего соединительного участка 531 имеет форму, соответствующую форме поперечного сечения зажимного отверстия 551, то есть D-образную форму, как показано на фигурах. Очевидно, что поскольку зажимное отверстие 551 и поперечное сечение скользящего соединительного участка 531 имеют D-образную форму, регулировочный винт 53 не может вращаться относительно кольцевого стопора 55, но может перемещаться относительно кольцевого стопора 55 в своем осевом направлении. Таким образом, регулировочный винт 53 выполняет движение подъема без вращения, обеспечивая эффективную регулировку подъема и предотвращая вращение магнитного притягивающего устройства 50 с созданием помех для движения гусеничного ходового механизма 30. Вышеупомянутый кольцевой стопор 55 имеет простую конфигурацию и низкую стоимость изготовления. Кольцевой стопор 55 установлен на стороне шасси 10, удаленной от регулировочной гайки 54, без возможности перемещения.
Как показано на фиг. 10-16, гусеничный ходовой механизм 30 дополнительно содержит первый механизм 60 натяжения, соединенный с держателем 31 катков и выполненный с возможностью регулировки натяжения гусеницы 34 в первом направлении, и второй механизм 70 натяжения, соединенный с держателем 31 катков и выполненный с возможностью регулировки натяжения гусеницы 34 во втором направлении, отличающемся от первого направления.
Как показано на фигуре 17, гусеничное шасси согласно одному из вариантов осуществления настоящего изобретения содержит первый механизм 60 натяжения и второй механизм 70 натяжения. Первый механизм 60 натяжения может регулировать натяжение гусеницы 34 в первом направлении, а второй механизм 70 натяжения может регулировать натяжение гусеницы 34 во втором направлении. Когда гусеничный сварочный робот не имеет достаточно места для поворота гусеницы 34 в первом направлении, гусеницу 34 можно натянуть во втором направлении посредством второго механизма 70 натяжения. Первый механизм 60 натяжения можно также использовать для частичного натяжения, причем второй механизм 70 натяжения может обеспечивать оставшееся натяжение. Натяжение гусеницы 34 осуществляется в общей сложности посредством двух отрезков натяжения. Если первый механизм 60 натяжения не имеет достаточно места для полного натяжения гусеницы 34, гусеничное шасси согласно варианту осуществления настоящего изобретения может натягивать гусеницу 34 с помощью второго механизма 70 натяжения, реализуя тем самым более гибкий способ натяжения. Предпочтительно, первое направление представляет собой боковое направление, совпадающее с направлением движения гусеничного ходового механизма 30, например, направление х на фигуре 17, а второе направление представляет собой продольное направление, перпендикулярное боковому направлению, например, направление z на фигуре 17. Способ натяжения первого механизма 60 натяжения и второго механизма 70 натяжения аналогичен существующему способу натяжения при условии, что гусеница 34 может быть натянута, поэтому его описание не будет приводиться повторно.
Выше раскрыты только предпочтительные варианты осуществления настоящего изобретения, и не ограничивающие защищаемый объем настоящего изобретения. Любая модификация, эквивалентная замена и усовершенствование, выполненные в духе и сущности настоящего изобретения, подлежат включению в защищаемый объем настоящего изобретения.
СПИСОК ССЫЛОЧНЫХ ОБОЗНАЧЕНИЙ
10 шасси
20 шарнир
30 гусеничный ходовой механизм
31 держатель катков
32 первая звездочка
33 вторая звездочка
34 гусеница
40 модуль наблюдения за ванной расплава
41 камера
421 первый экранирующий элемент
4211 первое светопропускающее отверстие
422 второй экранирующий элемент
4221 второе светопропускающее отверстие
423 пространство 4231 выемка
43 светопропускающая перегородка
44 вращающийся вал
50 магнитное притягивающее устройство
51 подъемный механизм
52 сквозное отверстие
53 регулировочный винт
531 скользящий соединительный участок
54 регулировочная гайка
55 кольцевой стопор 551 зажимное отверстие
60 первый механизм натяжения
70 второй механизм натяжения
80 сварочная горелка
90 ванна расплава
| название | год | авторы | номер документа |
|---|---|---|---|
| ГУСЕНИЧНЫЙ СВАРОЧНЫЙ РОБОТ И СПОСОБ УПРАВЛЕНИЯ ТАКИМ РОБОТОМ | 2019 |
|
RU2754728C1 |
| Мобильный робототехнический комплекс | 2015 |
|
RU2612115C1 |
| УНИВЕРСАЛЬНОЕ ГУСЕНИЧНОЕ ШАССИ НА ЕДИНОЙ ПЛАТФОРМЕ | 2009 |
|
RU2433934C2 |
| Роботизированный гусеничный опрыскиватель для обработки сельскохозяйственных культур | 2019 |
|
RU2701663C1 |
| СПОСОБ ОБКАТКИ ГУСЕНИЧНЫХ ЛЕНТ НА СТЕНДЕ (ВАРИАНТЫ) | 2010 |
|
RU2423681C1 |
| ТРАК ГУСЕНИЦЫ И ГУСЕНИЦА, ОБРАЗОВАННАЯ СОЕДИНЕНИЕМ ТАКИХ ТРАКОВ | 2020 |
|
RU2739378C1 |
| Устройство для дуговой сварки | 1990 |
|
SU1780958A1 |
| Тяговый гусеничный модуль с изменяемой площадью контакта для колесного трактора | 2023 |
|
RU2835909C1 |
| ПОДРАМНИК КРЫШКИ КУЗОВА ТРАНСПОРТНОГО СРЕДСТВА | 2020 |
|
RU2739202C1 |
| УСТАНОВКА ДЛЯ ДОБЫЧИ ЖЕЛЕЗОМАРГАНЦЕВЫХ КОНКРЕЦИЙ СО ДНА ОКЕАНА | 2005 |
|
RU2289696C1 |
Изобретение относится к области сварочной техники, а именно к гусеничному сварочному роботу для перемещения по свариваемому изделию и его сварки. Гусеничный сварочный робот содержит шасси и два гусеничных ходовых механизма, присоединенные к двум противоположным сторонам шасси соответственно. Держатели катков двух гусеничных ходовых механизмов соединены с шасси с возможностью перемещения. Посредством шарниров два гусеничных ходовых механизма соединены с шасси. Шарниры присоединены с возможностью вращения к держателю катков и/или шасси. Каждый шарнир имеет ось вращения, ориентированную в направлении движения гусеничных ходовых механизмов. Магнитное притягивающее устройство обеспечивает притягивание робота к свариваемому изделию, а подъемный механизм, установленный на шасси, выполнен с возможностью подъема и опускания магнитного притягивающего устройства. Таким образом, когда гусеничный сварочный робот движется по свариваемой поверхности, форма которой отличается от плоскости, два гусеничных ходовых механизма могут произвольно регулировать свое положение относительно шасси для адаптации к форме свариваемой поверхности и улучшать степень прилегания двух гусеничных ходовых механизмов к свариваемой поверхности, что облегчает управление направлением перемещения гусеничного сварочного робота и уменьшает вероятность соскальзывания или падения гусеничного сварочного робота со свариваемой поверхности. 8 з.п. ф-лы, 17 ил.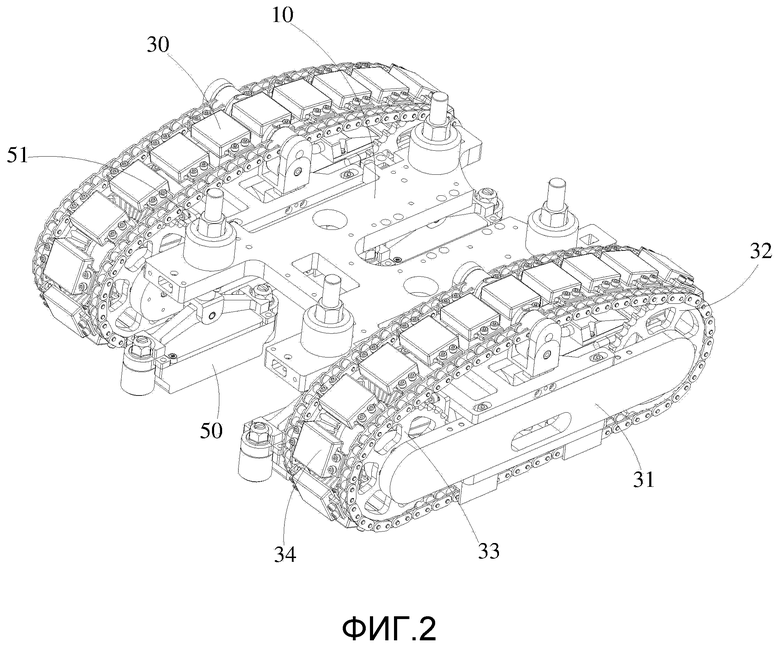
1. Гусеничный сварочный робот для перемещения по свариваемому изделию и для его сварки, содержащий шасси, два гусеничных ходовых механизма, присоединенных к двум противоположным сторонам шасси соответственно, и сварочную горелку, присоединенную к шасси и используемую для сварки, причем каждый гусеничный ходовой механизм содержит держатель катков, первую звездочку и вторую звездочку, присоединенные с возможностью вращения к двум концам держателя катков соответственно, и гусеницу, расположенную вокруг первой звездочки и второй звездочки, отличающийся тем, что держатели катков двух гусеничных ходовых механизмов присоединены с возможностью перемещения к противоположным сторонам шасси соответственно,
причем гусеничный сварочный робот содержит шарниры, посредством которых два гусеничных ходовых механизма соединены с шасси, при этом шарниры присоединены с возможностью вращения к держателю катков и/или шасси, и каждый шарнир имеет ось вращения, ориентированную в направлении движения гусеничных ходовых механизмов,
при этом гусеничный сварочный робот дополнительно содержит магнитное притягивающее устройство для притягивания к свариваемому изделию и подъемный механизм, установленный на шасси и выполненный с возможностью подъема и опускания магнитного притягивающего устройства.
2. Гусеничный сварочный робот по п. 1, отличающийся тем, что он дополнительно содержит модуль наблюдения за ванной расплава для контроля за условиями сварки сварочной горелкой, при этом модуль наблюдения за ванной расплава содержит камеру для фотографирования ванны расплава и экран для защиты от брызг, содержащий первый экранирующий элемент с первым светопропускающим отверстием и светопропускающую перегородку, расположенную между первым экранирующим элементом и камерой и закрывающую первое светопропускающее отверстие для защиты от брызг, причем камера выполнена с возможностью фотографирования ванны расплава через первое светопропускающее отверстие, при этом светопропускающая перегородка имеет площадь, по меньшей мере вдвое превышающую площадь первого светопропускающего отверстия, и выполнена с возможностью перемещения относительно первого светопропускающего отверстия таким образом, чтобы различные зоны светопропускающей перегородки закрывали первое светопропускающее отверстие.
3. Гусеничный сварочный робот по п. 2, отличающийся тем, что модуль наблюдения за ванной расплава дополнительно содержит вращающийся вал, к которому с возможностью вращения присоединена светопропускающая перегородка.
4. Гусеничный сварочный робот по п. 3, отличающийся тем, что экран дополнительно содержит второй экранирующий элемент, расположенный между первым экранирующим элементом и камерой, причем второй экранирующий элемент содержит второе светопропускающее отверстие, расположенное напротив первого светопропускающего отверстия, причем камера выполнена с возможностью фотографирования ванны расплава через первое светопропускающее отверстие и второе светопропускающее отверстие, причем первое светопропускающее отверстие и второе светопропускающее отверстие совместно определяют пространство между ними, внутри которого расположена светопропускающая перегородка, причем вращающийся вал соединен с первым и/или вторым экранирующим элементом.
5. Гусеничный сварочный робот по п. 4, отличающийся тем, что светопропускающая перегородка имеет цилиндрическую форму, при этом вращающийся вал присоединен с возможностью вращения к центру светопропускающей перегородки, а пространство содержит выемку, в которой открыта светопропускающая перегородка.
6. Гусеничный сварочный робот по п. 1, отличающийся тем, что шасси содержит сквозные отверстия, а подъемный механизм содержит регулировочный винт, проходящий через сквозное отверстие и соединенный одним концом с магнитным притягивающим устройством, и регулировочную гайку, расположенную на стороне шасси, удаленной от магнитного притягивающего устройства и соединенную на резьбе с регулировочным винтом, причем подъемный механизм дополнительно содержит кольцевой стопор, установленный на шасси без возможности смещения и выполненный с возможностью ограничения вращения регулировочного винта.
7. Гусеничный сварочный робот по п. 6, отличающийся тем, что кольцевой стопор содержит зажимное отверстие и расположен вокруг регулировочного винта, причем зажимное отверстие имеет D-образную форму и зажимает внешнюю периферийную поверхность регулировочного винта для ограничения вращения регулировочного винта, причем регулировочный винт содержит скользящий соединительный участок, взаимодействующий с зажимным отверстием с возможностью скольжения, причем форма поперечного сечения скользящего соединительного участка соответствует D-образной форме зажимного отверстия.
8. Гусеничный сварочный робот по п. 1, отличающийся тем, что гусеничный ходовой механизм дополнительно содержит первый механизм натяжения, соединенный с держателем катков и выполненный с возможностью регулировки натяжения гусеницы в первом направлении, и второй механизм натяжения, соединенный с держателем катков и выполненный с возможностью регулировки натяжения гусеницы во втором направлении, отличающемся от первого направления.
9. Гусеничный сварочный робот по п. 8, отличающийся тем, что первое направление соответствует боковому направлению, совпадающему с направлением движения гусеничного ходового механизма, а второе направление соответствует продольному направлению, перпендикулярному боковому направлению.
| US 20120111843 A1, 10.05.2012 | |||
| CN 107600214 A, 19.01.2018 | |||
| СПОСОБ ПРИГОТОВЛЕНИЯ ИСКУССТВЕННОГО КАМНЯ | 1929 |
|
SU18247A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО НА ГУСЕНИЧНОМ ХОДУ С ИЗМЕНЯЕМОЙ КОЛЕЕЙ | 2004 |
|
RU2310574C2 |
| УПРАВЛЯЕМЫЙ ГУСЕНИЧНЫЙ ХОДОВОЙ МЕХАНИЗМ | 2015 |
|
RU2679792C2 |
| Ходовая система гусеничного транспортного средства | 1988 |
|
SU1588621A1 |
| RU 95112777 A1, 27.08.1996. | |||

