Изобретение относится к контейнерному гравитационному транспорту и может быть использовано для перемещения технологических материалов и комплектующих изделий, применяемых в процессе промышленного производства.
Известна транспортная система маятникового типа, содержащая стационарный направляющий путь с наклонными участками гравитационного разгона и замедления колесного транспортного средства (см. патент RU№2077435, МПК (2006.01) B61B 1/00, 15/00, опубл. 20.04.1997 г.).
Недостатком данного устройства является невозможность перемещения колесного транспортного средства непосредственно в горизонтальном направлении из-за наличия установленных под углом друг к другу участков гравитационного разгона и замедления, которые увеличивают габаритные размеры транспортной системы и уменьшают возможное расстояние перемещения транспортного средства. Кроме того, одновременно с подъемом транспортного средства, для придания ему потенциальной энергии, требуется поднимать и концевые участки транспортного пути, что требует дополнительных затрат энергии.
Известна пневмогравитационная транспортная секция, включающая несущую контейнер поверхность, центр тяжести которой с помощью шарнирного соединения закреплен на стационарной опоре (см. патент RU №2757698, МПК (2006.01) B65G 11/02, B65G 11/12, B65G 11/18, B65G 35/00, опубл. 20.10. 2021 г.).
Недостатками устройства являются сложность конструкции, в связи с тем, что работа транспортной секции возможна только при наличии системы подготовки и транспортировки сжатого воздуха, а также фиксированный угол наклона несущей поверхности, связанный с применением трехпозиционных пневмоцилиндров.
Наиболее близким к заявляемому техническому решению является гравитационная транспортная секция, включающая несущую контейнер поверхность, центр тяжести которой с помощью шарнирного соединения закреплен на стационарной опоре, на концевых участках и в центре несущей поверхности установлены блоки датчиков, которые подключены к системе управления шаговым электродвигателем, (см. патент RU №2781415, МПК (2022.01) B65G 11/02, B65G 11/12, B65G 11/18, B65G 35/00, опубл. 11.10. 2022 г.).
Недостатком устройства является сложность конструкции механизмов электропривода, их значительные масса и габариты, что связано с наличием в электроприводе протяженной металлической цепной передачи.
Техническим результатом предлагаемого технического решения является уменьшение металлоемкости конструкции, снижение массы и габаритов устройства, а также повышение надежности за счет сокращения количества движущихся частей электропривода.
Данный технический результат достигается тем, что в гравитационной транспортной секции, включающей несущую контейнер поверхность, центр тяжести которой с помощью шарнирного соединения закреплен на стационарной опоре, на концевых участках и в центре несущей поверхности установлены блоки датчиков, которые подключены к системе управления шаговым электродвигателем, согласно изобретению, гравитационная транспортная секция дополнительно снабжена зубчатыми рейками, закрепленными на концевых участках несущей контейнер поверхности и ведущей шестеренкой, при этом зубчатые рейки выполнены в виде дуг окружности, центр которой совпадает с центром тяжести несущей поверхности, а ведущая шестеренка установлена на валу шагового электродвигателя, причем зубья одной из реек входят в зацепление с зубьями ведущей шестеренки.
Данная гравитационная транспортная секция позволит уменьшить металлоемкость конструкции, сократить ее массу и габариты и повысить надежность.
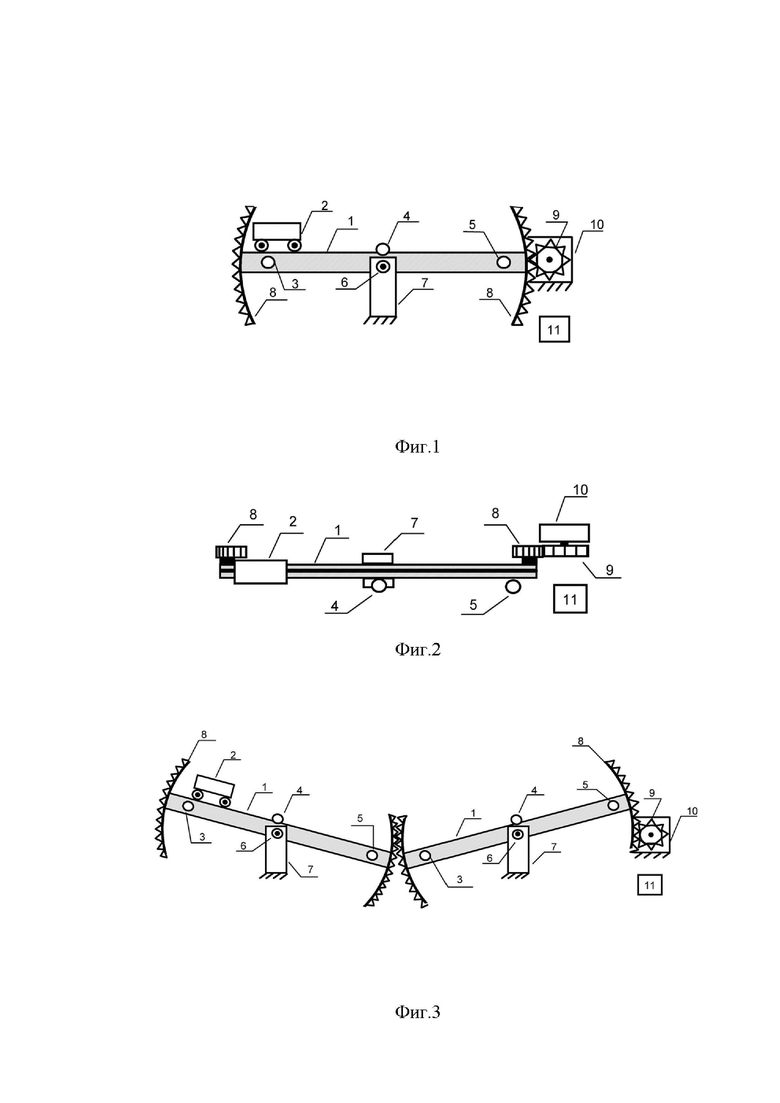
Сущность изобретения поясняется чертежами, где на фиг.1 изображена функциональная схема гравитационной транспортной секции, на фиг.2 показан вид сверху, поясняющий возможность беспрепятственного движения контейнера по несущей поверхности, на фиг.3 изображен фрагмент транспортной линии, выполненной на основе гравитационных транспортных секций.
Гравитационная транспортная секция состоит из несущей поверхности 1, на которой установлен движущийся контейнер 2, и блоки датчиков 3, 4, 5 контроля: угла наклона несущей поверхности 1, скорости движения контейнера 2 и его положения на несущей поверхности 1. Несущая поверхность 1, в точке ее центра тяжести, закреплена с помощью шарнирного соединения 6 на стационарной опоре 7. На концевых участках несущей поверхности 1 установлены дуговые зубчатые рейки 8, зубья одной из реек входят в зацепление с ведущей шестеренкой 9, закрепленной на валу шагового электродвигателя 10. Блоки датчиков 3, 4, 5, подключены к системе управления 11 шаговым электродвигателем 10.
Гравитационная транспортная секция работает следующим образом.
Состояние механизмов транспортной секции (см. фиг.1 и фиг. 2), используется, при работе секции в составе транспортной линии, для приема контейнера 2 из соседней секции или при работе секции в пассивном режиме для беспрепятственного движения контейнера 2 по инерции через несущую поверхность 1. В этом режиме система управления 11 получает информацию из блоков датчиков 3, 4, 5 о положении несущей поверхности 1 и изменяет направление вращения вала шагового электродвигателя 10, при этом зацепление зубьев, установленной на валу шестеренки 9 с зубьями, соответствующей дуговой рейки 8 обеспечивает изменение угла наклона несущей поверхности 1, таким образом, чтобы она приняла горизонтальное положение.
При движении контейнера 2 по транспортной линии, например, слева направо, контейнер 2, поступив на несущую поверхность 1, попадает в зону действия блока датчиков 3. Приняв сигнал от блока датчиков 3, система управления 11 управляет работой шагового электродвигателя 10 таким образом, чтобы был изменен угол наклона несущей поверхности 1, и контейнер 2 был поднят на высоту, необходимую для придания ему такой потенциальной энергии, которая обеспечит дальнейшее горизонтальное движение контейнера 2 по инерции на требуемое расстояние, при этом механизмы секции принимают состояние, показанное на фиг.3. Поднятый транспортный контейнер 2 получает запас потенциальной энергии и расходует ее на движение по несущей поверхности 1. Двигаясь по наклонной несущей поверхности 1, контейнер 2 попадает в зону действия блока датчиков 4, сигнал от которого поступает в систему управления 11 и инициирует процесс перевода несущей поверхности в горизонтальное положение, показанное на фиг.1. Контейнер 2 продолжает горизонтальное движение по инерции, переходит на следующую секцию транспортной линии (см. фиг.3) и, в зависимости от величины накопленной энергии, проходит через нее по инерции или останавливается, израсходовав накопленную ранее энергию, или получает необходимый запас энергии за счет подъема контейнера на требуемую высоту.
Аналогичным образом осуществляется движение контейнера справа налево, при этом, контейнер 2 активирует блок датчиков 5, что вызывает подъем контейнера 2 относительно горизонтальной поверхности на высоту, обеспечивающую накопление необходимой энергии для дальнейшего движение контейнера 2. При движении по наклонной несущей поверхности 1, контейнер 2 попадает в зону, контролируемую блоком датчиков 4, сигнал от которого запускает процесс перевода несущей поверхности 1 в горизонтальное положение.
Состояние механизмов транспортной секции (см. фиг.3), также используется для гравитационного торможения контейнера 2, движущегося справа налево. Контейнер 2 попадает в зону действия блока датчиков 5, система управления 11, анализируя сигналы блока датчиков 5, определяет скорость и энергию контейнера 2 и, управляя работой шагового двигателя 10, изменяет угол наклона несущей поверхности 1 таким образом, чтобы контейнер потерял накопленную ранее энергию. При этом контейнер 2 продолжает движение по инерции, теряет энергию и при пересечении контейнером 2 зоны, контролируемой блоком датчиков 4, несущая поверхность 1 переводится в горизонтальное положение, обеспечивается плавная парковка транспортного контейнера 2. Аналогичным образом осуществляется процесс гравитационного торможения при движении контейнера 2 слева направо, в этом случае процесс торможения запускает, поступающий в систему управления 11, сигнал от блока датчиков 3.
Шарнирное соединение 6 несущей поверхности 1 со стационарной опорой 7 делит несущую поверхность 1 на две уравновешенные части, поэтому электрическая энергия, подводимая к шаговому электродвигателю 10, расходуется только на подъем веса транспортного контейнера 2 и для преодоления сил трения в зубчатых соединениях шестеренки 9 и дуговых реек 8.
Гравитационная транспортная секция может использоваться как самостоятельно, так и в составе транспортной линии, образованной соединением, с помощью дуговых зубчатых реек 8, отдельных гравитационных секций, при этом каждая гравитационная транспортная секция работает в режиме приема контейнера 2, гравитационного разгона, гравитационного торможения и в режиме пассивного состояния, при котором контейнер 2 по инерции движется по несущей поверхности 1.
Использование гравитационной транспортной секции с дуговыми зубчатыми рейками позволит по сравнению с прототипом сократить металлоемкость конструкции, повысить ее надежность и улучшить массогабаритные показатели.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гравитационная транспортная секция | 2022 |
|
RU2781415C1 |
| Пневмогравитационная транспортная секция | 2023 |
|
RU2815431C1 |
| Пневмогравитационная транспортная секция | 2021 |
|
RU2757698C1 |
| Стан холодной прокатки труб переменного сечения | 1987 |
|
SU1496849A1 |
| УБИРАЮЩИЙСЯ СТОЛ | 2016 |
|
RU2720612C2 |
| Прибор для измерения круглого леса в кубометрах | 1934 |
|
SU43181A1 |
| Реечный холодильник сортового проката | 1988 |
|
SU1627297A1 |
| Механизм шагового перемещения | 1983 |
|
SU1084197A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО С РЕГУЛИРУЕМОЙ В ЗАВИСИМОСТИ ОТ ПОЛОЖЕНИЯ ЦЕНТРА МАСС ГРУЗА ТОЧКОЙ ПОДВЕСА | 2007 |
|
RU2344986C1 |
| УСТРОЙСТВО ДЛЯ ХРАНЕНИЯ И ВЫДАЧИ ТОВАРНЫХ ПРЕДМЕТОВ | 2018 |
|
RU2672936C1 |
Гравитационная транспортная секция включает несущую контейнер поверхность, центр тяжести которой с помощью шарнирного соединения закреплен на стационарной опоре, на концевых участках и в центре несущей поверхности установлены блоки датчиков, которые подключены к системе управления шаговым электродвигателем. Гравитационная транспортная секция снабжена зубчатыми рейками, закрепленными на концевых участках несущей контейнер поверхности, и ведущей шестеренкой. При этом зубчатые рейки выполнены в виде дуг окружности, центр которой совпадает с центром тяжести несущей поверхности, а ведущая шестерёнка установлена на валу шагового электродвигателя, причем зубья одной из реек входят в зацепление с зубьями ведущей шестеренки. Обеспечиваются уменьшение металлоемкости конструкции, снижение массы и габаритов устройства, а также повышение надежности за счет сокращения количества движущихся частей электропривода. 3 ил.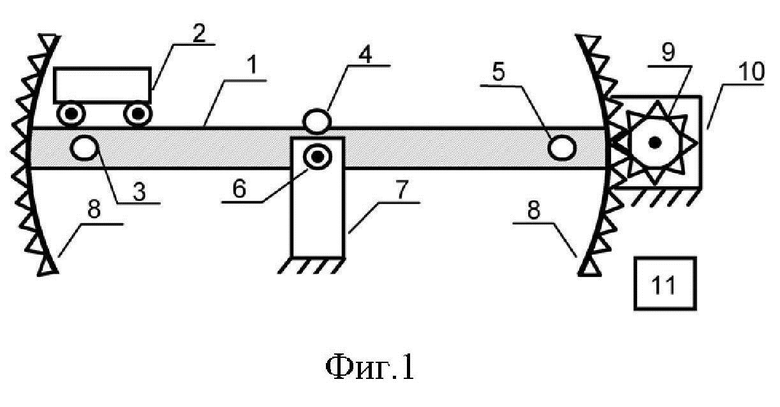
Гравитационная транспортная секция, включающая несущую контейнер поверхность, центр тяжести которой с помощью шарнирного соединения закреплен на стационарной опоре, на концевых участках и в центре несущей поверхности установлены блоки датчиков, которые подключены к системе управления шаговым электродвигателем, отличающаяся тем, что гравитационная транспортная секция дополнительно снабжена зубчатыми рейками, закрепленными на концевых участках несущей контейнер поверхности, и ведущей шестеренкой, при этом зубчатые рейки выполнены в виде дуг окружности, центр которой совпадает с центром тяжести несущей поверхности, а ведущая шестерёнка установлена на валу шагового электродвигателя, причем зубья одной из реек входят в зацепление с зубьями ведущей шестеренки.
| Гравитационная транспортная секция | 2022 |
|
RU2781415C1 |
| CN 207030253 U, 23.02.2018 | |||
| Пневмогравитационная транспортная секция | 2021 |
|
RU2757698C1 |
| Конвейер для транспортирования сыпучих и кусковых материалов | 2018 |
|
RU2702211C1 |
| CN 208948317 U, 07.06.2019. | |||

