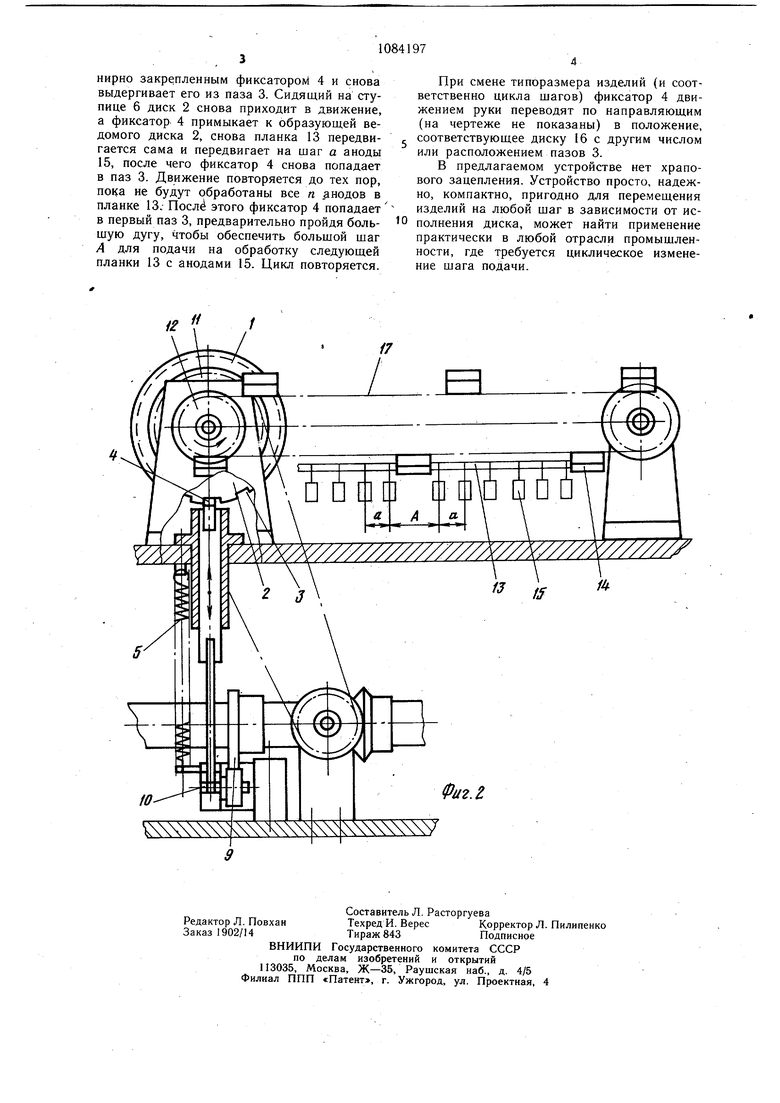
Изобретение относится к механизмам шагового перемешения и может быть использовано в транспортирующих устройствах с переменным шагом подачи изделий, оно создано для автоматов и автоматических линий предприятий конденсаторостроения, но может быть использовано в производствах электротехнической, радиоэлектронной или машиностроительной промышленности. Известен механизм шагового перемеш,ения, содержаший каретку, которая перемещается возвратно-поступательно под действием кривошипа, шарнирно соединенного с шатуном. Кривошип приводится в движение от зубчатой рейки с шестеренкой или от приводного электродвигателя. Имеется также ряд зубчатых колес, находящихся в зацеплении между собой и связанных с шатуном 1. Недостаток указанного механизма состоит в том, что в нем не обеспечивается автоматическое изменение шага. Для изменения шага подачи применяют переключающиеся зубчатые передачи, что усложняет конструкцию механизма. Наиболее близким к изобретению является механизм щагового перемещения, содержащий установленные на валу ведущее и ведомое звенья, связанный с ведомым звеном качающийся рычаг, привод рычага в виде кулачка и привод ведущего звена 2. Недостатком известного устройства является то, что шаг ведомого звена, т.е. поворот вала, на котором жестко закреплено храповое колесо, находится в прямой зависимости от щага расположения зубьев храпового колеса, что ограничивает возможности данного механизма. Целью изобретения является расширение технологических возможностей. Указанная цель достигается тем, что в механизме щагового перемещения, содержащем установленные на валу ведущее и ведомое звенья, связанный с ведомым звеном качающийся рычаг, привод рычага в виде кулачка и привод ведущего звена, ведущее и ведомое звенья выполнены в виде фрикционных дисков, причем ведомый фрикционный диск выполнен с пазами, расположенными по его периметру, при этом механизм снабжен фиксатором, подпружиненным к поверхности ведомого фрикционного диска по его периметру и щарнирно связанным с качающимся рычагом. На фиг. 1 изображен механизм щагового перемещения, примененный в транспортном устройстве полуавтомата приварки вывода к секции конденсатора; на фиг. 2 - то же, вид сбоку. Механизм содержит ведущее звено - фрикционный диск 1 и взаимодействующий с ним фрикционный диск 2, являющийся ведомым звеном. Ведомый фрикционный диск 2 выполнен с пазами 3, расположенными по его периметру. Для остановки дви197 жения служит фиксатор 4, входящий поД действием пружины 5 в паз 3 ведомого диска 2, сидящего на -ступице 6, закрепленной с помощью шпонки по ходовой посадке на валу 7 и подпружиненной к ведущему диску 1 пружиной 8. Для вывода фиксатора 4 из паза 3 (освобождения диска) служит кулачок 9, воздействующий на шарнирно связанный с фиксатором 4 рычаг 10. Диск 1 установлен на свободно сидящей на валу 7 звездочке 11, связанной цепной передачей с приводом ведущего звена. На валу 7 закреплена также звездочка 12 для перемещения транспортера и вместе с ним - детали 13. Транспортируемая деталь представляет собой установленную в подвесках 14 планку 13с приваренными к ней анодами 15. Расстояние между центрами двух крайних анодов, расположенных на концах двух смежных планок 13, составляет шаг подачи планки на рабочую позицию - А (больщой щаг). Расстояние на планке между двумя центрами соседних анодов составляет малый шаг подачи - а. Если на планке 13 размещено «анодов, то полный поворот диска 2, рассчитанный на цикл их обработки, осуществляет перемещение планки (транспортера) на расстояние А + а п. Для перенастройки на другой ци,кл перемещения на валу может быть установлен еще один диск 16 с другим числом или расположением пазов, закрепленный на фрикционном диске 2. Тогда вся установка транспортера 17 на другой типономинал сводится к переводу фиксатора 4 в соответствующие расположению диска 16 направляюцхие (не показаны). Число дисков может быть любым, соответствующим числу групп обрабатываемых типоразм,еров деталей. Механизм перемещения работает следующим образом. В исходном положении фиксатор 4 находится в пазу 3 диска 2. При включении привода вращение через цепную передачу передается на звездочку 11 и соответственно на ведущий диск I. Пока фиксатор 4 находится в пазу диска 2, диск 2 не вращается. При выводе фиксатора из паза ведомый диск 2, сидящий на ступице 6 и прижатый пружиной 8 к ведущему диску 1, начинает вращаться, передавая это вращение через шпонку валу 7 и закрепленной на валу звездочке 12 транспортера 17 (фиг. 2), в подвесках 14 которого установлены технологические планки 13 с приваренными к ним анодами 15. Фиксатор 4, подпружиненный к образующей диска 2 пружиной 5, входит в паз 3 диска 2 и останавливает вращение вала 7 и движение транспортируемой детали 13. На рабочей позиции происходит обработка анода 15. Затем кулачок 9, совершив оборот, воздействует на рычаг 10 с шар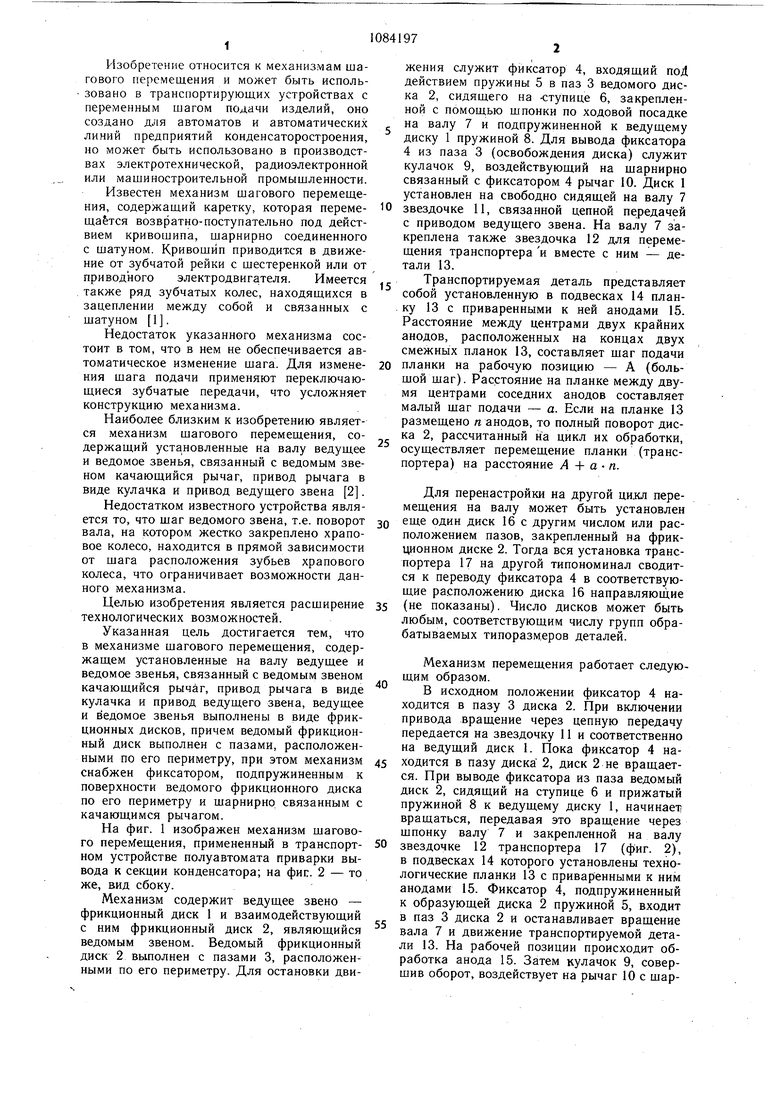
| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортное устройство | 1980 |
|
SU887122A1 |
| Автомат для сборки изделий типа цепного транспортера | 1973 |
|
SU518316A1 |
| Устройство для поштучной выдачи деталей | 1979 |
|
SU861001A1 |
| Автомат к лесопосадочной машине для подачи сеянцев | 1988 |
|
SU1613024A2 |
| Устройство для укладки в стопу плоских предметов | 1975 |
|
SU648432A1 |
| АВТОМАТ ДЛЯ УКЛАДКИ БУТЫЛОК В ЯЩИКИ | 1964 |
|
SU165402A1 |
| ШВЕЙНЫЙ ПОЛУАВТОМАТ | 1973 |
|
SU379704A1 |
| Предохранительная муфта | 1978 |
|
SU800456A1 |
| УСТАНОВКА ДЛЯ ПРОИЗВОДСТВА КЕРАМИЧЕСКИХ ПЛИТОК МЕТОДОМ НАПЛАСТОВАНИЯ | 1969 |
|
SU250704A1 |
| СТАНОК ДЛЯ ЗАБИВАНИЯ ГРЕБЕННЫХ ИГЛ В ИГЛОНАБОРНЫЁ ПЛАНКИ | 1970 |
|
SU278483A1 |
МЕХАНИЗМ ШАГОВОГО ПЕРЕМЕЩЕНИЯ, содержащий установленные на валу ведущее и ведомое звенья, связанный с ведомым звеном качающийся рычаг, привод рычага в виде кулачка и привод ведущего звена, отличающийся тем, что, с целью расширения его технологических возможностей, ведущее и ведомое звенья выполнены в виде фрикционных дисков, причем ведомый фрикционный диск выполнен с пазами, расположенными по его периметру, .при этом механизм снабжен фиксатором, подпружиненным к поверхности ведомого фрикционного диска по его периметру и щарнирно связанным с качающимся рычагом.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент Великобритании № 1395058, кл | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| ПРИБОР ДЛЯ ЗАПИСИ И ВОСПРОИЗВЕДЕНИЯ ЗВУКОВ | 1923 |
|
SU1974A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Транспортное устройство | 1980 |
|
SU887122A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
