Изобретение относится к контейнерному гравитационному транспорту и может быть использовано для перемещения технологических материалов и комплектующих изделий, применяемых в процессе промышленного производства.
Известна транспортная система маятникового типа, содержащая стационарный направляющий путь с наклонными участками гравитационного разгона и замедления колесного транспортного средства (см. патент RU №2077435, МПК6 B61B 1/00, 15/00, опубл. 20.04.1997 г.).
Недостатком данного устройства является невозможность перемещения колесного транспортного средства непосредственно в горизонтальном направлении из-за наличия установленных под углом друг к другу участков гравитационного разгона и замедления, которые увеличивают габаритные размеры транспортной системы и уменьшают возможное расстояние перемещения транспортного средства. Кроме того, одновременно с подъемом транспортного средства, для придания ему потенциальной энергии, требуется поднимать и концевые участки транспортного пути, что требует дополнительных затрат энергии.
Известна гравитационная транспортная система, состоящая из опор, между которыми, под углом к горизонтальной плоскости, жестко закреплена несущая поверхность с движущимся по ней, под действием силы тяжести, колесным транспортным средством, (патент WO 2009/132518 A1, МПК2006/01 B65G 9/00, В66В 20/00, В61В 5/00,7/00, 9/00, 12/02, опубл. 11.05.2009 г.).
Недостатками транспортной системы является ее сложность и невозможность оперативно изменять направление движения транспортного средства, жесткая связь несущей поверхности с опорами не позволяет устройству работать в челночном режиме.
Наиболее близким к заявляемому техническому решению является пневмогравитационная транспортная секция, включающая несущую контейнер поверхность, центр тяжести которой с помощью шарнирного соединения закреплен на стационарной опоре, (см. патент RU №2757698, МПК2021.01 B65G 9/00, B66B 9/04 , опубл. 20.10. 2021 г.).
Недостатками прототипа являются сложность конструкции, в связи с тем, что работа пневмогравитационной транспортной секции возможна только при наличии системы подготовки и транспортировки сжатого воздуха, а также фиксированный угол наклона несущей поверхности, связанный с применением трехпозиционных пневмоцилиндров, не позволяет плавно регулировать величину потенциальной энергии транспортного контейнера.
Техническим результатом предлагаемого технического решения является упрощение конструкции, расширение функциональных возможностей, повышение надежности и снижение транспортных энергозатрат.
Данный технический результат достигается тем, что в гравитационной транспортной секции, включающей несущую контейнер поверхность, центр тяжести которой с помощью шарнирного соединения закреплен на стационарной опоре, согласно изобретению, гравитационная транспортная секция дополнительно снабжена шаговым электродвигателем, промежуточным роликом, гибкой цепной передачей, блоком датчиков и системой управления шаговым электродвигателем, при этом концевые участки несущей поверхности соединены гибкой цепной передачей, звенья цепи которой входят в зацепление с ведущей звездочкой, закрепленной на валу шагового электродвигателя, причем шаговый электродвигатель и промежуточный ролик закреплены на стационарных опорах так, что концы цепи соединены с концевыми участками несущей поверхности, образуя прямой угол с несущей поверхностью при ее горизонтальном положении, а на концевых участках и в центре несущей поверхности установлены блоки датчиков, которые подключены к системе управления шаговым электродвигателем.
Данная гравитационная транспортная секция позволит упростить конструкцию, расширить функциональные возможности, повысить надёжность и снизить транспортные энергозатраты.
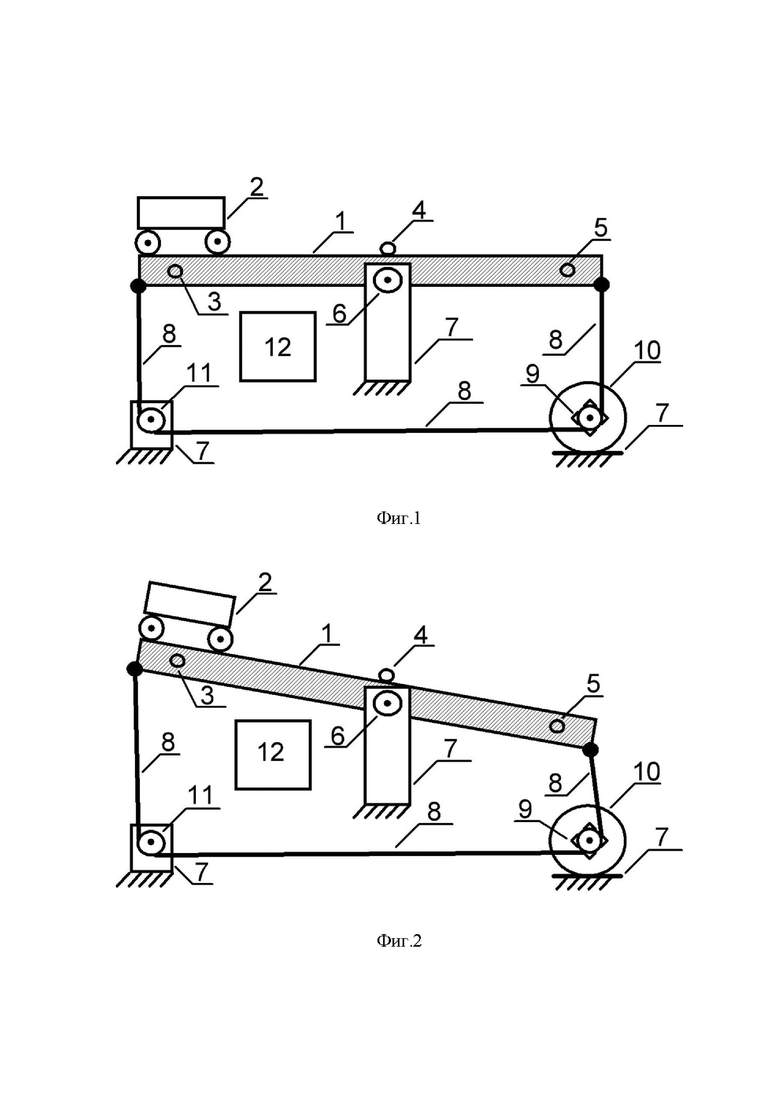
Сущность изобретения поясняется чертежами, где на фиг. 1 изображена функциональная схема гравитационной транспортной секции с шаговым электродвигателем, на фиг. 2 - состояние механизмов транспортной секции в режиме гравитационного разгона контейнера.
Гравитационная транспортная секция состоит из несущей поверхности 1, на которой удерживается движущийся контейнер 2, и блоков датчиков 3, 4, 5 контроля горизонтального положения несущей поверхности 1, скорости движения контейнера 2 и его положения на несущей поверхности 1. Несущая поверхность 1, в точке ее центра тяжести, закреплена с помощью шарнирного соединения 6 на стационарной опоре 7.
Концевые участки несущей поверхности 1 соединены между собой гибкой цепной передачей 8, звенья цепи которой входят в зацепление с ведущей звездочкой 9, закрепленной на валу шагового электродвигателя 10. Шаговый электродвигатель 10 и натяжной промежуточный ролик 11 установлены на стационарной опоре 7 таким образом, чтобы концы цепи 8, закрепленные на стационарной опоре 1, образовывали прямой угол с несущей поверхностью 1 при ее горизонтальном положении. Блоки датчиков 3, 4, 5, подключены к системе управления 12 шаговым электродвигателем 10.
Гравитационная транспортная секция может использоваться как самостоятельно, так и в составе транспортной линии, образованной последовательным соединением отдельных секций, при этом гравитационная транспортная секция работает в режиме приема контейнера, гравитационного разгона, гравитационного торможения и в режиме пассивного состояния, при котором контейнер 2 по инерции движется по несущей поверхности 1.
Гравитационная транспортная секция работает следующим образом.
Состояние механизмов транспортной секции, которое используется, при работе секции в составе транспортной линии, для приема контейнера 2 из соседней секции или при работе секции в пассивном режиме для беспрепятственного движения контейнера по инерции через несущую поверхность 1, показано на фиг. 1. В этом режиме система управления 12 получает информацию из блоков датчиков 3, 4, 5 о положении несущей поверхности 1 и изменяет направление вращения вала шагового электродвигателя таким образом, чтобы несущая поверхность 1, за счет натяжения цепи 8, приняла горизонтальное положение.
При движении контейнера 2 по транспортной линии, например, слева направо, контейнер, поступив на несущую поверхность 1, попадает в зону действия блока датчиков 3. Приняв сигнал от блока датчиков 3, система управления 12 управляет работой шагового электродвигателя 10 таким образом, чтобы за счет натяжения цепи 8 был изменен угол наклона несущей поверхности 1, и контейнер 2 был поднят на высоту, необходимую для придания ему такой потенциальной энергии, которая обеспечит дальнейшее горизонтальное движение контейнера 2 по инерции на требуемое расстояние, при этом механизмы секции принимают состояние, показанное на фиг. 2. Поднятый транспортный контейнер 2 получает запас потенциальной энергии и расходует его на движение по инерции. Двигаясь по наклонной несущей поверхности 1, контейнер 2 попадает в зону действия блока датчиков 4, сигнал от которого поступает в систему управления 12 и инициирует процесс перевода механизмов секции в горизонтальное состояние, показанное на фиг. 1. Контейнер 2 продолжает горизонтальное движение по инерции, переходит на следующую секцию транспортной линии и, в зависимости от величины накопленной энергии, проходит через нее по инерции или останавливается, израсходовав накопленную ранее энергию.
Аналогичным образом осуществляется движение контейнера справа налево, при этом, контейнер 2 активирует блок датчиков 5, что вызывает подъем контейнера 2 относительно горизонтальной поверхности на высоту обеспечивающую накопление необходимой энергии для дальнейшего движение контейнера 2. При движении по наклонной несущей поверхности 1, контейнер 2 попадает в зону, контролируемую блоком датчиков 4, сигнал от которого запускает процесс перевода несущей поверхности 1 в горизонтальное положение.
Состояние механизмов транспортной секции (см. фиг. 2), также используется для гравитационного торможения контейнера 2, движущегося справа налево. Контейнер 2 попадает в зону действия блока датчиков 5, система управления 12, анализируя сигналы блока датчиков 5, определяет скорость и энергию контейнера и, управляя работой шагового двигателя 10, изменяет угол наклона несущей поверхности 1 таким образом, чтобы контейнер потерял накопленную ранее энергию. При этом контейнер 2 продолжает движение по инерции, теряет энергию и при пересечении контейнером 2 зоны контролируемой блоком датчиков 4, несущая поверхность 1 переводится в горизонтальное положение, обеспечивается плавная парковка транспортного контейнера 2. Аналогичным образом осуществляется процесс гравитационного торможения при движении контейнера 2 слева направо, в этом случае процесс торможения запускает, поступающий в систему управления 12, сигнал от блока датчиков 3.
Шарнирное соединение 6 несущей поверхности 1 со стационарной опорой 7 делит несущую поверхность 1 на две равно уравновешенные части, поэтому электрическая энергия, подводимая к шаговому электродвигателю 10, расходуется только на подъем веса транспортного контейнера 2.
Использование гравитационной транспортной секции позволит по сравнению с прототипом упростить конструкцию, расширить функциональные возможности, повысить ее надежность и уменьшить транспортные энергозатраты.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гравитационная транспортная секция | 2022 |
|
RU2792470C1 |
| Пневмогравитационная транспортная секция | 2023 |
|
RU2815431C1 |
| Пневмогравитационная транспортная секция | 2021 |
|
RU2757698C1 |
| ТРАНСПОРТНАЯ СИСТЕМА ДЛЯ ДВИЖЕНИЯ ПО ГРАВИТАЦИОННОЙ ВНЕУЛИЧНОЙ ТРАССЕ | 2001 |
|
RU2199457C1 |
| СПОСОБ ТРАНСПОРТИРОВАНИЯ ГРУЗОВ ОТ ПОЗИЦИИ ПРИЕМА К ПОЗИЦИИ ВЫДАЧИ И СИСТЕМА ТРАНСПОРТИРОВАНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2018481C1 |
| ТРАНСПОРТНАЯ СИСТЕМА МАЯТНИКОВОГО ТИПА | 1993 |
|
RU2077435C1 |
| СПОСОБ ПОЛУЧЕНИЯ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2006671C1 |
| КОМПЛЕКС ПОДЪЕМНО-ТРАНСПОРТНОГО ОБОРУДОВАНИЯ ДЛЯ УТИЛИЗАЦИИ ЖИДКИХ РАДИОАКТИВНЫХ ОТХОДОВ НА АТОМНОЙ ЭЛЕКТРОСТАНЦИИ И ЕГО СОСТАВНЫЕ ЧАСТИ | 2007 |
|
RU2350545C1 |
| УСТАНОВКА РАЗВЕРТЫВАНИЯ ЛИНЕЙНЫХ ЗАРЯДОВ РАЗМИНИРОВАНИЯ (ВАРИАНТЫ) | 2019 |
|
RU2699165C1 |
| СЕКЦИОННЫЙ ТРАНСПОРТЕР ДЛЯ ПЕРЕМЕЩЕНИЯ СЫПУЧИХ МАТЕРИАЛОВ ЧЕРЕЗ ПРОСТРАНСТВА С ПРЕПЯТСТВИЯМИ И СПОСОБ ОСУЩЕСТВЛЕНИЯ ТРАНСПОРТИРОВКИ СЫПУЧИХ МАТЕРИАЛОВ | 2015 |
|
RU2602156C2 |
Гравитационная транспортная секция включает несущую контейнер поверхность, центр тяжести которой с помощью шарнирного соединения закреплен на стационарной опоре. Транспортная секция дополнительно снабжена шаговым электродвигателем, промежуточным роликом, гибкой цепной передачей, блоком датчиков и системой управления шаговым электродвигателем. Концевые участки несущей поверхности соединены гибкой цепной передачей, звенья цепи которой входят в зацепление с ведущей звездочкой, закрепленной на валу шагового электродвигателя. Шаговый электродвигатель и промежуточный ролик закреплены на стационарных опорах, а концы цепи соединены с концевыми участками несущей поверхности, образуя прямой угол с несущей поверхностью при ее горизонтальном положении. На концевых участках и в центре несущей поверхности установлены блоки датчиков, которые подключены к системе управления шаговым электродвигателем. Технический результат заключается в упрощении конструкции, расширении функциональных возможностей, повышении надежности и снижении транспортных энергозатрат. 2 ил.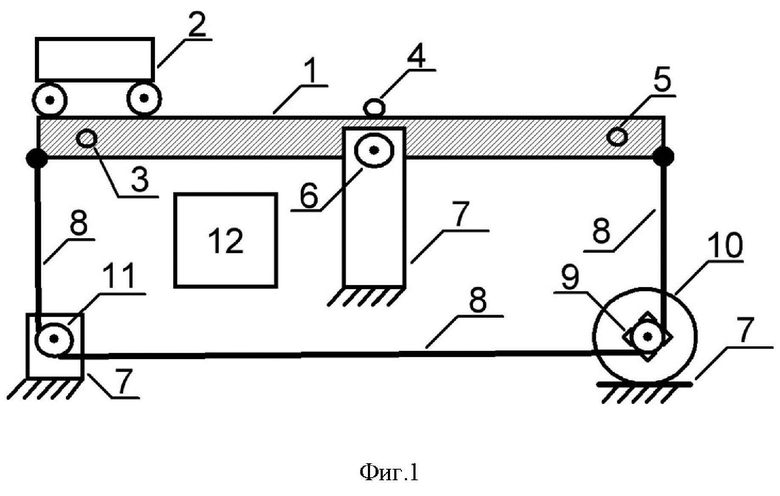
Гравитационная транспортная секция, включающая несущую контейнер поверхность, центр тяжести которой с помощью шарнирного соединения закреплен на стационарной опоре, отличающаяся тем, что гравитационная транспортная секция дополнительно снабжена шаговым электродвигателем, промежуточным роликом, гибкой цепной передачей, блоком датчиков и системой управления шаговым электродвигателем, при этом концевые участки несущей поверхности соединены гибкой цепной передачей, звенья цепи которой входят в зацепление с ведущей звездочкой, закрепленной на валу шагового электродвигателя, причем шаговый электродвигатель и промежуточный ролик закреплены на стационарных опорах так, что концы цепи соединены с концевыми участками несущей поверхности, образуя прямой угол с несущей поверхностью при ее горизонтальном положении, а на концевых участках и в центре несущей поверхности установлены блоки датчиков, которые подключены к системе управления шаговым электродвигателем.
| Пневмогравитационная транспортная секция | 2021 |
|
RU2757698C1 |
| WO 2009132518 A1, 05.11.2009 | |||
| Конвейер для транспортирования сыпучих и кусковых материалов | 2018 |
|
RU2702211C1 |
| U S4530428 A, 23.07.1985. | |||

