Изобретение относится к контейнерному гравитационному транспорту и может быть использовано для перемещения технологических материалов и комплектующих изделий, применяемых в процессе промышленного производства.
Известна гравитационная транспортная секция, включающая несущую контейнер поверхность, центр тяжести которой с помощью шарнирного соединения закреплен на стационарной опоре, и электропривод, предназначенный для изменения угла наклона несущей поверхности. Для контроля положения контейнера на несущей поверхности, на концевых участках и в центре несущей поверхности установлены блоки датчиков, подключенные к системе управления электроприводом (см. патент RU №2781415, МПК (2023.01) B65G 11/02, B65G 11/12, B65G 11/18, B65G 35/00, опубл. 11.10. 2022 г.).
Недостатком устройства является сложность конструкции, связанная с необходимостью применять протяженные информационные каналы для передачи информации, от удаленно расположенных датчиков, в систему управления.
Наиболее близким к заявляемому техническому решению является пневмогравитационная транспортная секция, включающая пневмопривод с системой управления, и несущую контейнер поверхность, центр тяжести которой с помощью шарнирного соединения закреплен на стационарной опоре, причём пневмопривод содержит трёхпозиционный пневмоцилиндр, (см. патент RU №2757698, МПК (2006.01) B65G 11/02, B65G 11/12, B65G 11/18, B65G 35/00, опубл. 20.10. 2021 г.).
Недостатком прототипа является сложность конструкции, связанная с необходимостью применять протяженные информационные каналы для передачи информации, от удаленно расположенных датчиков, в систему управления и для передачи команд управления от системы управления к удаленно расположенным силовым установкам пневмопривода.
Техническим результатом предлагаемого технического решения, является улучшение массогабаритных показателей конструкции, повышение её надежности и упрощение конструкции устройства за счет сокращения количества информационных датчиков, количества силовых установок пневмопривода и устранения протяженных каналов передачи информации.
Данный технический результат достигается тем, что пневмогравитационная транспортная секция, включающая пневмопривод с системой управления, и несущую контейнер поверхность, центр тяжести которой с помощью шарнирного соединения закреплен на стационарной опоре, причём пневмопривод содержит трёхпозиционный пневмоцилиндр, согласно изобретению, пневмогравитационная транспортная секция дополнительно снабжена тензометрическим датчиком силы растяжения и сжатия, установленным между корпусом трехпозиционного пневмоцилиндра и стационарной опорой, при этом шток трехпозиционного пневмоцилиндра с помощью блока шарниров соединен с одним из концевых участков несущей поверхности, а тензометрический датчик подключен к системе управления пневмоприводом.
Данная пневмогравитационная транспортная секция позволит упростить конструкцию устройства, повысить её надежность и улучшить массогабаритные показатели.
Сущность изобретения поясняется чертежами, где на фиг.1, фиг.2, фиг.3 показаны схемы, поясняющие основные принципы функционирования пневмогравитационной транспортной секции.
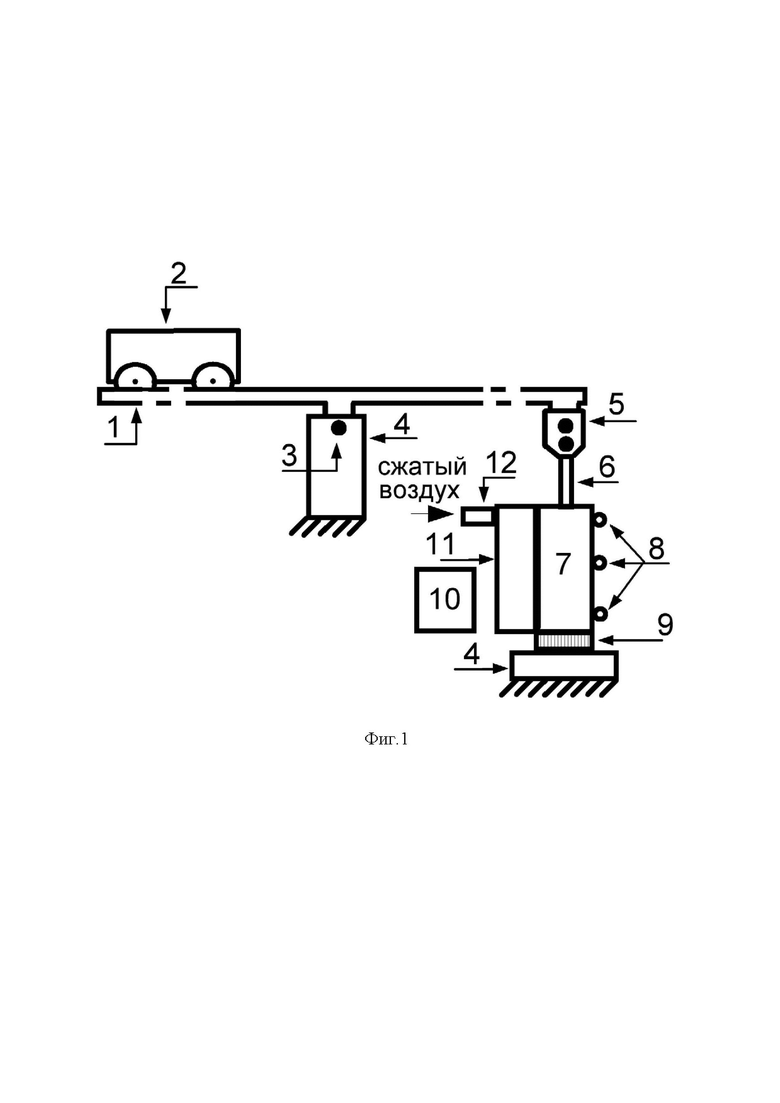
Пневмогравитационная транспортная секция состоит из несущей поверхности 1, на которой удерживается движущийся контейнер 2. Несущая поверхность 1, в точке ее центра тяжести, закреплена с помощью шарнирного соединения 3 на стационарной опоре 4. Один из концевых участков несущей поверхности 1 с помощью блока шарниров 5 соединен со штоком 6 трехпозиционного пневмоцилиндра 7. На корпусе трехпозиционного пневмоцилиндра 7 установлены датчики 8, контролирующие положение штока 6. Между корпусом пневмоцилиндра 7 и стационарной опорой 4 установлен тензометрический датчик 9 силы растяжения и сжатия. Датчики 8 и тензометрический датчик 9 подключены к системе управления 10 пневмораспределителем 11 сжатого воздуха, поступающего в пневмораспределитель 11 через штуцер 12.
Пневмогравитационная транспортная секция используется как самостоятельно, так и в составе транспортной линии, образованной состыковкой торцов несущих поверхностей отдельных секций, при этом пневмогравитационная транспортная секция работает в режиме приема контейнера 2, гравитационного разгона, гравитационного торможения и в режиме пассивного состояния, при котором контейнер 2 по инерции движется по несущей поверхности 1.
Пневмогравитационная транспортная секция работает следующим образом.
Движение контейнера 2 по несущей поверхности 1 приводит к изменению направления и величины силы, прикладываемой к тензометрическому датчику 9, при этом меняется полярность и амплитуда сигнала, поступающего от тензометрического датчика 9 в систему управления 10. Минимальную амплитуду сигнал датчика 9 имеет, если контейнер 2 находится в центре несущей поверхности 1. Датчик 9 формирует сигналы максимальной амплитуды, когда контейнер 2 находится на концевых участках несущей поверхности 1, причем полярности этих сигналов противоположны, потому что на тензометрический датчик 9 действуют силы противоположного направления. Контролируя изменение сигнала тензометрического датчика 9, система управления 10 контролирует положение контейнера 2 в любой точке несущей поверхности 1 и, изменяя угол наклона несущей поверхности 1, с помощью перемещения штока 6 трехпозиционного пневмоцилиндра 7 (см. фиг.1, фиг.2, фиг.3), реализует отмеченные выше режимы работы пневмогравитационной транспортной секции.
Состояние механизмов транспортной секции (см. фиг.1), используется, для приема контейнера 2, поступающего на несущую поверхность 1 слева или справа, а также при работе секции в пассивном режиме для беспрепятственного движения контейнера 2 по инерции через несущую поверхность 1.
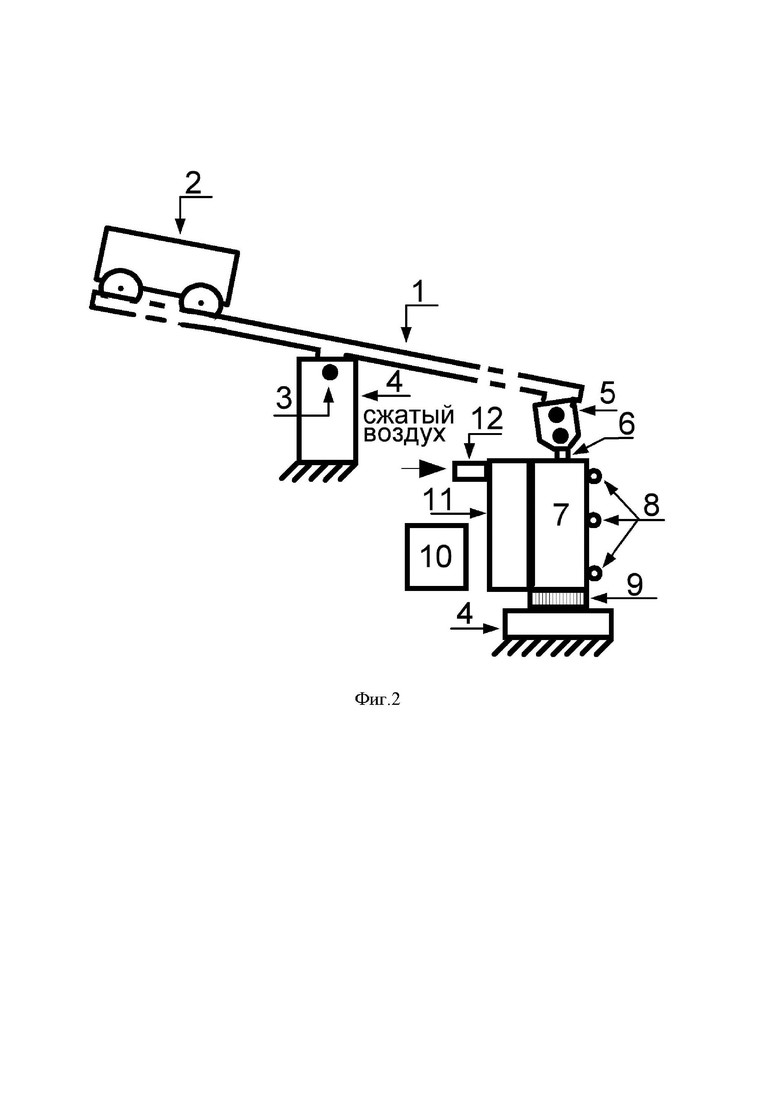
При поступлении на концевой участок несущей поверхности 1 контейнера 2, движущегося слева направо (см. фиг.1), к тензометрическому датчику 9 прикладывается сила растяжения максимальной величины, при этом в систему управления 10 от тензометрического датчика 9 поступает сигнал максимальной величины и полярности, соответствующей такому направлению действия силы на тензометрический датчик 9. Приняв этот сигнал, система управления 10 управляет работой пневмораспределителя 11 сжатого воздуха, поступающего через штуцер 12, таким образом, чтобы шток 6 трехпозиционного пневмоцилиндра 7 принял положение, показанное на фиг. 2, при этом блок шарниров 5 устраняет поперечные нагрузки на шток 6, обеспечивая движение концевого участка несущей поверхности 1 по дуге окружности, центр которой совпадает с центром несущей поверхности 1. Положение штока 6 трехпозиционного пневмоцилиндра 7 контролируют датчики 8, подключенные к системе управления 10. Поднятый контейнер 2 получает запас потенциальной энергии и расходует ее на движение по несущей поверхности 1. При движении контейнера 2 амплитуда сигнала формируемого тензометрическим датчиком 9 уменьшается до минимальной величины, которая инициирует процесс перевода несущей поверхности 1 в горизонтальное положение, показанное на фиг.1. Контейнер 2 продолжает горизонтальное движение по инерции, переходит на следующую секцию транспортной линии, либо останавливается, израсходовав накопленную энергию.
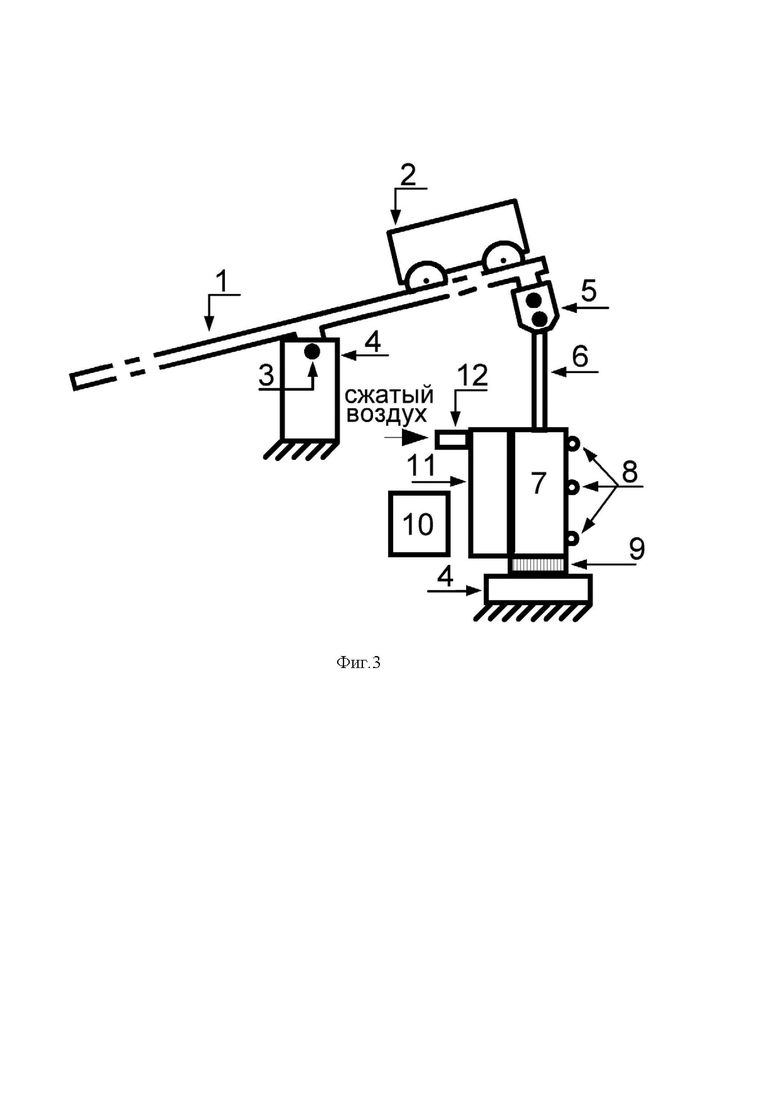
Аналогичным образом осуществляется движение контейнера справа налево. Поступление контейнера 2 на несущую поверхность приводит к сжатию тензометрического датчика 9 и в систему управления 10 поступает сигнал, полярность которого соответствует направлению действия силы сжатия, это вызывает подъем контейнера 2 относительно горизонтальной поверхности для придания ему потенциальной энергии (см. фиг.3). При движении контейнера 2 по наклонной поверхности 1 амплитуда сигнала тензометрического датчика 9 уменьшается до минимальной величины и запускается процесс перевода несущей поверхности 1 в горизонтальное положение.
Состояние механизмов транспортной секции (см. фиг.3), также используется для гравитационного торможения контейнера 2, движущегося слева направо. При этом система управления 10, анализируя скорость изменения сигнала тензометрического датчика 9, определяет скорость контейнера 2 и, управляя работой трехпозиционного пневмоцилиндра 7, изменяет угол наклона несущей поверхности 1 таким образом, чтобы контейнер потерял накопленную ранее энергию. При этом контейнер 2 продолжает движение по инерции, теряет скорость, и система управления переводит несущую поверхность 1 в горизонтальное положение, обеспечивая плавную парковку транспортного контейнера 2. Аналогичным образом осуществляется процесс гравитационного торможения при движении контейнера 2 справа налево, при этом механизмы транспортной секции принимают положение, показанное на фиг.2.
Шарнирное соединение 3 несущей поверхности 1 со стационарной опорой 4 делит несущую поверхность на две уравновешенные части, поэтому энергия сжатого воздуха, подводимого к трехпозиционному пневмоцилиндру 7, расходуется только на подъем веса транспортного контейнера 2 и для преодоления сил трения в шарнирных соединениях.
Использование пневмогравитационной транспортной секции позволит, по сравнению с прототипом, упростить конструкцию, повысить ее надежность и улучшить массогабаритные показатели.
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневмогравитационная транспортная секция | 2021 |
|
RU2757698C1 |
| Гравитационная транспортная секция | 2022 |
|
RU2781415C1 |
| Гравитационная транспортная секция | 2022 |
|
RU2792470C1 |
| Автоматический стрелочный перевод контейнерного пневмотранспорта | 2020 |
|
RU2734563C1 |
| УСТАНОВКА ДЛЯ ОТДЕЛЕНИЯ АРМАТУРЫ ОТ РЕЗИНОМЕТАЛЛИЧЕСКИХ ИЗДЕЛИЙ | 1991 |
|
RU2037417C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ПРЕИМУЩЕСТВЕННО МОБИЛЬНОЙ АНТЕННОЙ УСТАНОВКИ С ПОДЪЕМНОЙ МАЧТОЙ | 2005 |
|
RU2281244C1 |
| УСТАНОВКА ДЛЯ ЗАГРУЗКИ ШИХТЫ В МЕТАЛЛУРГИЧЕСКУЮ ПЕЧЬ | 2013 |
|
RU2542032C1 |
| СЦЕПНОЕ УСТРОЙСТВО АВТОПОЕЗДА | 1994 |
|
RU2094282C1 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД СИСТЕМЫ УПРАВЛЕНИЯ ИСПОЛНИТЕЛЬНЫМИ МЕХАНИЗМАМИ | 2021 |
|
RU2767676C1 |
| Манипулятор | 1990 |
|
SU1754435A1 |
Изобретение относится к контейнерному гравитационному транспорту и может быть использовано для перемещения технологических материалов и комплектующих изделий, применяемых в процессе промышленного производства. Пневмогравитационная транспортная секция включает пневмопривод с системой управления и несущую контейнер поверхность, центр тяжести которой с помощью шарнирного соединения закреплен на стационарной опоре, причём пневмопривод содержит трёхпозиционный пневмоцилиндр. Пневмогравитационная транспортная секция дополнительно снабжена тензометрическим датчиком силы растяжения и сжатия, установленным между корпусом трехпозиционного пневмоцилиндра, и стационарной опорой, при этом шток трехпозиционного пневмоцилиндра с помощью блока шарниров соединен с одним из концевых участков несущей поверхности, а тензометрический датчик подключен к системе управления пневмоприводом. Технический результат - упрощение конструкции устройства, повышение её надежности и улучшение массогабаритных показателей конструкции. 3 ил.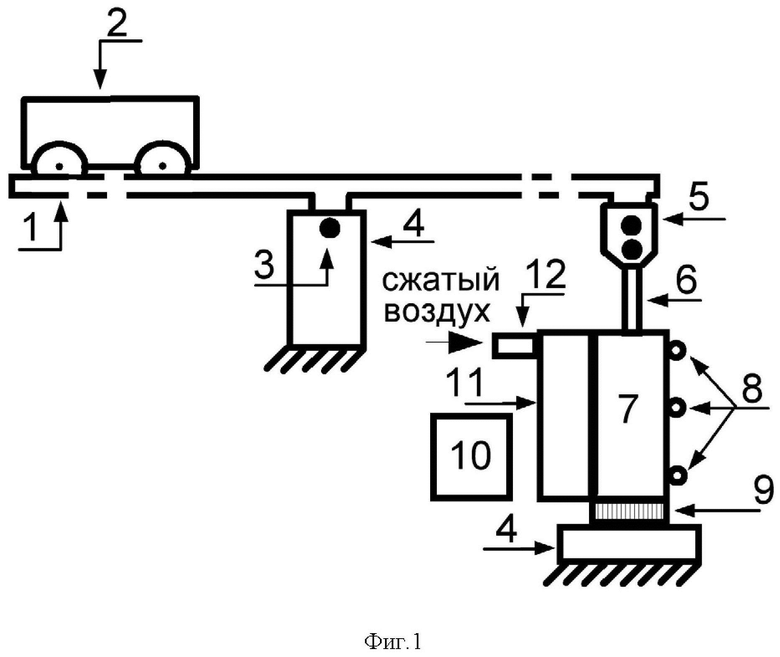
Пневмогравитационная транспортная секция, включающая пневмопривод с системой управления и несущую контейнер поверхность, центр тяжести которой с помощью шарнирного соединения закреплен на стационарной опоре, причём пневмопривод содержит трёхпозиционный пневмоцилиндр, отличающаяся тем, что пневмогравитационная транспортная секция дополнительно снабжена тензометрическим датчиком силы растяжения и сжатия, установленным между корпусом трехпозиционного пневмоцилиндра и стационарной опорой, при этом шток трехпозиционного пневмоцилиндра с помощью блока шарниров соединен с одним из концевых участков несущей поверхности, а тензометрический датчик подключен к системе управления пневмоприводом.
| Пневмогравитационная транспортная секция | 2021 |
|
RU2757698C1 |
| Гравитационная транспортная секция | 2022 |
|
RU2781415C1 |
| Гравитационная транспортная секция | 2022 |
|
RU2792470C1 |
| WO 2009132518 A1, 05.11.2009 | |||
| Конвейер для транспортирования сыпучих и кусковых материалов | 2018 |
|
RU2702211C1 |

