Область техники, к которой относится изобретение
Изобретение относится к области робототехники и аграрной техники, в частности к конструкции беспилотного летального аппарата (БПЛА), применяемого в сельском хозяйстве для отбора колосьев пшеницы с зернами лучших посевных качеств.
Уровень техники
Известно, что зерна пшеницы, которые формируются в колосе на главном стебле, имеют значительно лучшие посевные и урожайные качества, нежели зерна со стеблей второго и следующих порядков. Для отбора зерен с лучшими посевными качествами, колосья главного стебля срезаются отдельно перед уборкой участка (делянки), сохраняются, а зерно, полученное от них, высевается раздельно, в соответствующих питомниках для оценки с исходными формами. Таким методом в 1915 году селекционер В.И. Желткевич на Мироновской селекционной станции отобрал около 300 лучших колосьев из местной венгерской «Банатки» и на их основе создал всемирно известный сорт озимой мягкой пшеницы Украинка 0246 (Шелепов В.В. и др. Пшеница: история, морфология, биология, селекция. ЗАТ Мироновка, 2009. - 575 с. (см. стр. 102-103)).
Метод, включающий операцию по отбору колосьев с заданными признаками, положен в основу ряда запатентованных изобретений. Например, известен способ отбора высокопродуктивных селекционных образцов озимых зерновых культур, включающий учет массы зерна в фазу полной спелости с вычислением коэффициента удельной продуктивности, отличающийся тем, что высокопродуктивные селекционные образцы выделяют по максимальному показателю индекса продуктивности растений (ИПР), который определяется в фазу полного созревания по длине колоса, числу зерен в колосе и массе зерна с колоса, по формуле: ИПР=(ЧЗ × ВЗ) /ДК, где ЧЗ - число зерен, шт.; ВЗ - масса зерна с колоса, г; ДК - длина колоса, (см. пат. РФ №2710056, кл. A01H 1/04)
Недостаток известного способа - трудоемок, колосья отбираются ручным способом. Современный уровень науки и техники позволяет решать задачу по автоматизации отбора колосьев с заданными признаками на основе методов машинного зрения, компьютерного обучения и БПЛА.
В работе (Пронозин А.Ю. и др. Автоматическое фенотипирование морфологии колоса тетра- и гексаплоидных видов пшеницы методами компьютерного зрения. Вавиловский журнал генетики и селекции. 2021; 25(1):71-81. DOI 10.18699/VJ21.009) показано, что использование технологий компьютерной обработки цифровых изображений позволяет анализировать до девяти количественных признаков, описывающих форму, размер и остистость колосьев пшеницы.
В большинстве случаев БПЛА снабжены видеокамерами с высоким разрешением и мощными вычислительными системами, что предоставляет возможности их использования для отбора колосьев пшеницы с заданными признаками.
Известна конструкция БПЛА, предназначенная для автоматизированного опрыскивания растений (US 20130068892 A1, Desa et al., 21.03.2013). Данное решение представляет собой БПЛА, на борту которого установлена система опрыскивания растений, соединенная с емкостью с жидким химикатом и управляемая подачей жидкости через помпу. БПЛА управляется с помощью вычислительной системы, получая команды от пользователя, управляющего БПЛА с помощью беспроводного пульта управления.
Недостаток данной конструкции - ограниченная функциональность, обусловленная тем, что БПЛА не может осуществлять необходимые работы самостоятельно без участия пользователя, т.е. работать в автоматическом режиме.
Наиболее близким по технической сущности к заявляемому техническому решению и принятое авторами за прототип является БПЛА для обработки растений содержащий: корпус, внутри которого установлены: аккумулятор, вычислительный блок, блок памяти, навигационная система, средства беспроводной приема-передачи информации, винтомоторная группа, система обработки растений (СОР), емкость с химикатами, соединенная с СОР, модуль управления СОР, датчик уровня химикатов, видеокамера, причем вычислительный блок выполнен с возможностью обработки данных, полученных от видеокамеры и передачи данных модулю управления, вычислительный блок связан с датчиком уровня химикатов, который выполнен с возможностью формирования сигнала о необходимости дозаправки химикатов и датчиком контроля заряда аккумулятора, который выполнен с возможностью формирования сигнала о необходимости замены аккумулятора (см. пат. РФ №2710056, кл. A01H 1/04).
Недостаток известного решения - ограничены функциональные возможности, а именно, отсутствует функция отбора колосьев пшеницы с заданными признаками, характеризующими наличие в этих колосьях зерен лучших посевных качеств.
Раскрытие изобретения
Технический результат, который может быть достигнут с помощью предлагаемого изобретения, сводится к расширению функциональных возможностей БПЛА, а именно, к реализации функций отбора колосьев пшеницы с зернами лучших посевных качеств и определению среднего веса колосьев.
Технический результат достигается тем, что в БПЛА для отбора колосьев пшеницы с зернами лучших посевных качеств содержащий: корпус, модуль управления, видеокамеру, навигационную систему, радиомодуль, вычислительный блок, систему передвижения БПЛА, емкость, причем вычислительный блок выполнен с возможностью обмена данными с видеокамерой, модулем управления, системой передвижения БПЛА, навигационной системой и радиомодулем, отличающийся тем, что в него дополнительно введены: устройство среза колосьев и их перемещения в емкость сбора колосьев, электронные весы, причем, емкость сбора колосьев установлена на электронных весах, информационный выход которых подключен к вычислительному блоку, модуль управления выполнен с возможностью управления устройством среза колосьев и их перемещения в емкость сбора колосьев, а также с возможностью подсчета количества колосьев, помещенных в емкость сбора колосьев.
Краткое описание чертежей
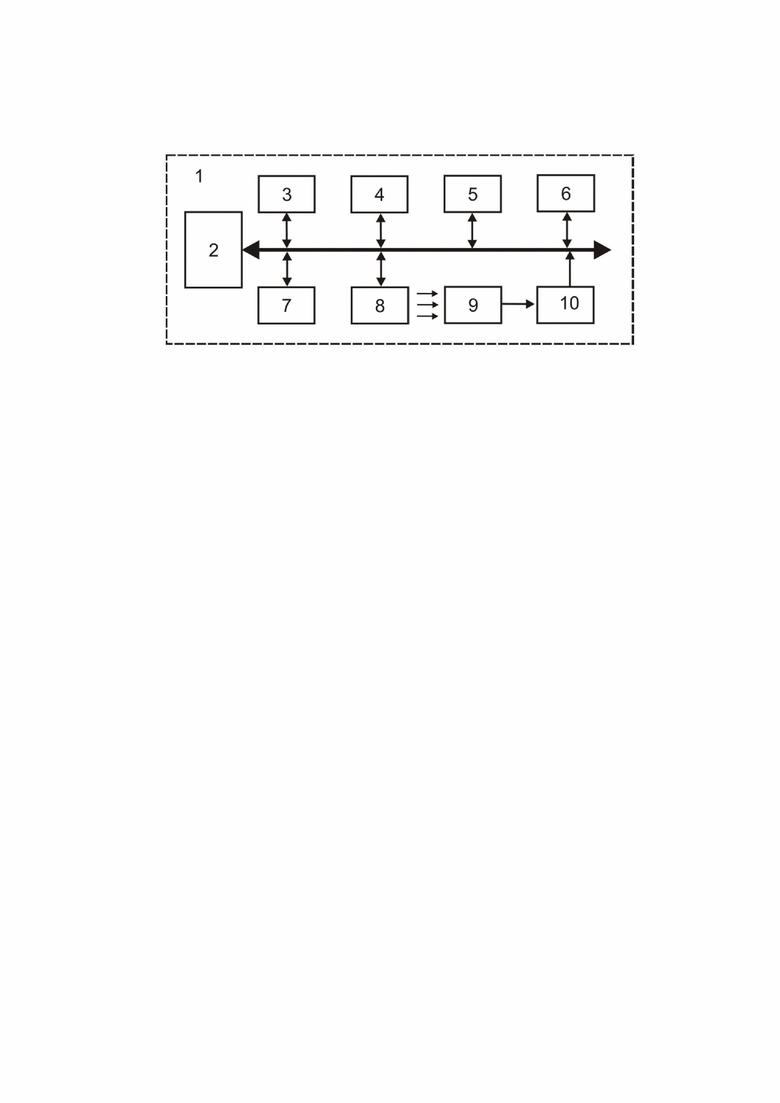
На фиг. представлена структурная схема БПЛА для отбора колосьев пшеницы с зернами лучших посевных качеств.
Осуществление изобретения
БПЛА для отбора колосьев пшеницы с зернами лучших посевных качеств содержит: (фиг.) корпус 1, вычислительный блок 2, систему 3 передвижения БПЛА, радиомодуль 4, навигационную систему 5, видеокамеру 6, модуль управления 7, устройство 8 среза колосьев и их перемещения в емкость 9 сбора колосьев, электронные весы 10. Перечисленные элементы 2 - 10 закреплены в корпусе 1.
Вычислительный блок 2 построен на микроконтроллере, который обменивается данными с элементами 3 - 7 и 10, подключенными к выводам микроконтроллера; система 3 передвижения БПЛА содержит винтомоторную группу, аккумулятор и систему управления винтомоторной группой под действием сигналов, поступающих от вычислительного блока 2; радиомодуль 4 (предназначен для беспроводной приема-передачи информации) представляет собой трансивер ISM диапазона для организации автоматизированного управления БПЛА пользователем; навигационная система 5, предназначена для организации автоматического управления передвижением БПЛА над заданной территорией и может быть выполнена на базе чипов, работающих в системах GPS/ГЛОНАСС/Galileo/BeiDou; видеокамера 6 предназначена как для ориентации БПЛА в пространстве с препятствиями, так для получения цифровых изображений колосьев, вычислительный блок 2 выявляет в цифровых изображениях признаки колосьев, характеризующие в них наличие зерен с высокими посевными качествами и если такие признаки имеются, то формирует сигнал на срезание данного колоса, этот сигнал поступает в модуль управления 7; модуль управления 7 предназначен для управления устройством 8 среза колосьев и их перемещения в емкость 9 сбора колосьев; информация от электронных весов 10 поступает в вычислительный блок 2, который формирует команды для системы 3 передвижения БПЛА в район выгрузки колосьев, при достижении заданного веса емкости 9 в зависимости от ее наполнения колосьями.
БПЛА для отбора колосьев пшеницы с зернами лучших посевных качеств работает следующим образом.
Допустим, необходимо отобрать колосья, с заданными признаками. Растения находятся на участке, предназначенном для выращивания семенного зерна, и расположены параллельными рядами. БПЛА, используя алгоритмы ориентации, заложенные в программное обеспечение вычислительного блока 2, а также исходные данные, получаемые от видеокамеры 6, движется между рядами со скоростью позволяющей, обнаруживать колосья с заданными признаками. Обнаружив такие колосья, БПЛА приближается к ним на расстояние, позволяющее автоматически с использованием устройства 8 срезать эти колосья и помещать их в емкость 9. После прохождения первого ряда БПЛА заходит на второй ряд, используя при этом и/или алгоритмы ориентации по данным видеокамеры 6 и/или команды пользователя, получаемые с использованием радиомодуля 4 и/или системы навигации 5. После прохождения второго ряда БПЛА заходит на третий ряд и т.д. В вычислительный блок 2 непрерывно поступает информация от электронных весов 10 и от модуля управления 7 о количестве помещенных в емкость 9 колосьев. При достижении заданного веса, собранных в емкость 9 колосьев, вычислительный блок 2 подает системе 3 передвижения БПЛА команды о необходимости выгрузки колосьев в заданном пользователем месте. Вычислительный блок 2 рассчитывает средний вес одного колоса и сохраняет эту информацию в памяти, для ее анализа пользователем. Вес одного колоса является одним из признаков, характеризующих посевные качества зерен этого колоса.
Предлагаемое изобретение по сравнению с прототипом и другими известными решениями имеет преимущество: расширены функциональные возможности, а именно, БПЛА реализует функцию отбора созревших в полевых условиях (питомниках) колосьев пшеницы с зернами лучших посевных качеств и дополнительно предоставляет пользователю информацию о среднем весе отобранных колосьев и их количестве.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ МОНИТОРИНГА СОСТОЯНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ ПРИ ДВИЖЕНИИ ПОЕЗДА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2829561C2 |
| Беспилотный летательный аппарат вертолётного типа | 2022 |
|
RU2799689C1 |
| Автономный беспилотный летательный аппарат для доставки малокалиберных боеприпасов до цели | 2023 |
|
RU2826931C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ПРИ ДВИЖЕНИИ ПОЕЗДА МЕТРОПОЛИТЕНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ С ПРИМЕНЕНИЕМ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2022 |
|
RU2829794C2 |
| КОМПЛЕКС РАСПРЕДЕЛЕННОГО УПРАВЛЕНИЯ ИНТЕЛЛЕКТУАЛЬНЫМИ РОБОТАМИ ДЛЯ БОРЬБЫ С МАЛОГАБАРИТНЫМИ БЕСПИЛОТНЫМИ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2019 |
|
RU2717047C1 |
| Беспилотный летательный аппарат самолетного типа для обнаружения пропавшего человека | 2019 |
|
RU2723201C1 |
| Модульный беспилотный летательный аппарат с системой защиты тяговых винтов | 2020 |
|
RU2752110C1 |
| Беспилотный летательный аппарат для обработки пестицидами пропашных культур | 2023 |
|
RU2808295C1 |
| Беспилотный летательный аппарат для обработки пестицидами садовых деревьев и кустарников | 2023 |
|
RU2808292C1 |
| Беспилотный летательный аппарат для внесения пестицидов в промышленном садоводстве и питомниководстве | 2023 |
|
RU2808008C1 |
Изобретение относится к области робототехники и аграрной техники, в частности к конструкции беспилотного летального аппарата (БПЛА), применяемого в сельском хозяйстве для отбора созревших в полевых условиях колосьев пшеницы с зернами лучших посевных качеств. БПЛА содержит закрепленные в корпусе вычислительный блок, систему передвижения, радиомодуль, навигационную систему, видеокамеру, модуль управления, устройство среза колосьев и их перемещения в емкость сбора колосьев, электронные весы. Емкость сбора колосьев установлена на электронных весах, информационный выход которых подключен к вычислительному блоку, модуль управления выполнен с возможностью управления устройством среза колосьев и их перемещения в емкость сбора колосьев, а также с возможностью подсчета количества колосьев. Реализуется функция отбора колосьев пшеницы с зернами лучших посевных качеств, определяется средний вес колосьев. 1 ил.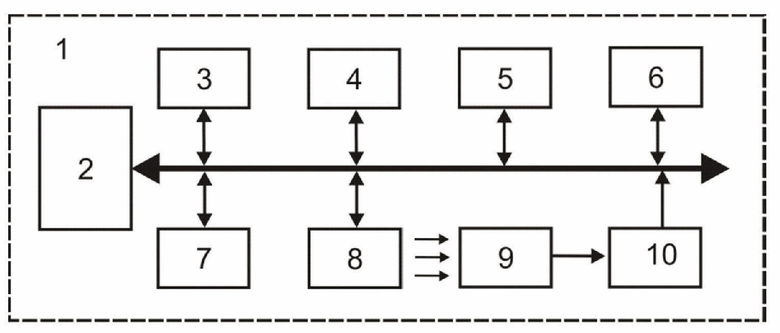
Беспилотный летательный аппарат (БПЛА) для отбора колосьев пшеницы с зернами лучших посевных качеств содержащий: корпус, модуль управления, видеокамеру, навигационную систему, радиомодуль, вычислительный блок, систему передвижения БПЛА, емкость, причем вычислительный блок выполнен с возможностью обмена данными с видеокамерой, модулем управления, системой передвижения БПЛА, навигационной системой и радиомодулем, отличающийся тем, что в него введены: устройство среза колосьев и их перемещения в емкость сбора колосьев, электронные весы, причем емкость сбора колосьев установлена на электронных весах, информационный выход которых подключен к вычислительному блоку, модуль управления выполнен с возможностью управления устройством среза колосьев и их перемещения в емкость сбора колосьев, а также с возможностью подсчета количества колосьев, помещенных в емкость сбора колосьев.
| RU 179386 U1, 11.05.2018 | |||
| US 20130068892 A1, 21.03.2013 | |||
| Способ отбора высокопродуктивных селекционных образцов озимых зерновых культур | 2019 |
|
RU2710056C1 |
| CN 111837678 А, 30.10.2020 | |||
| CN 114402995 A, 29.04.2022 | |||
| CN 113841532 А, 28.12.2021. | |||

