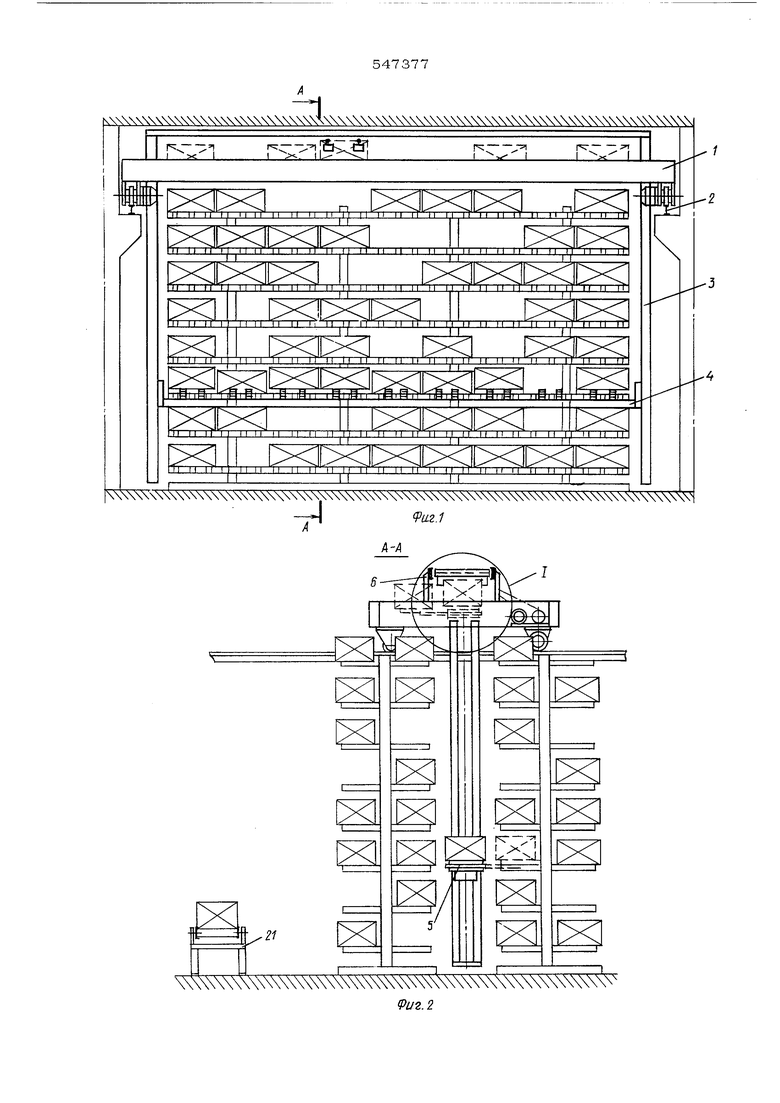
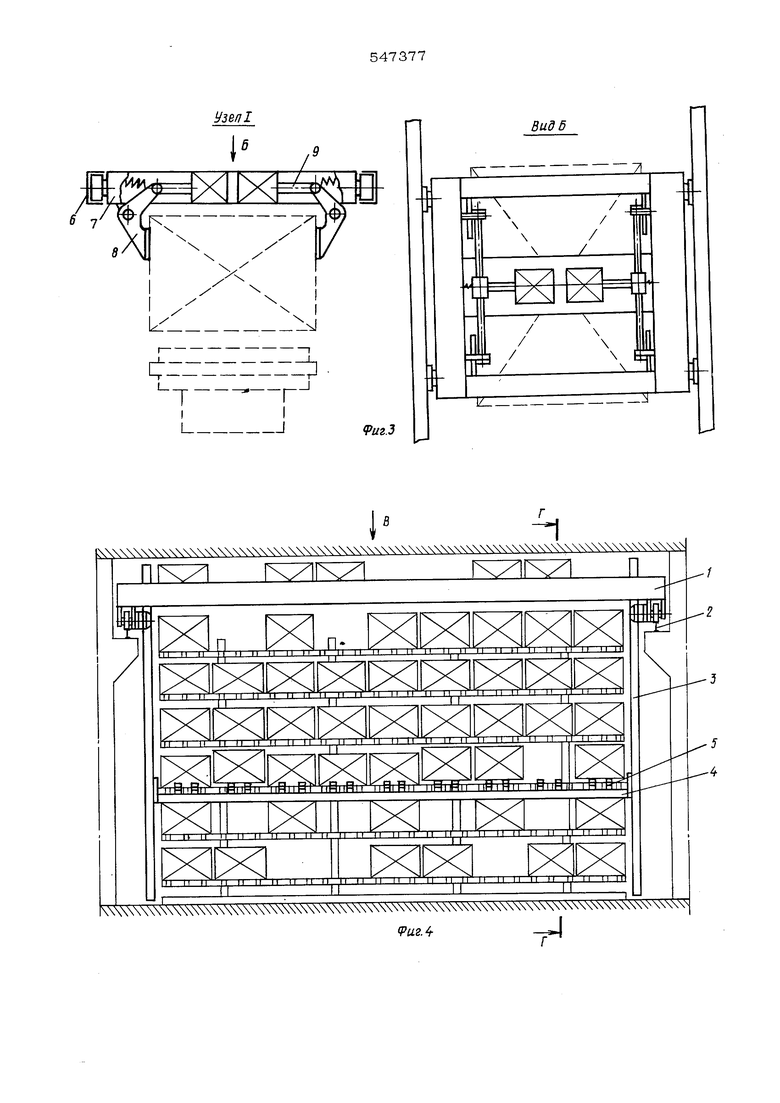
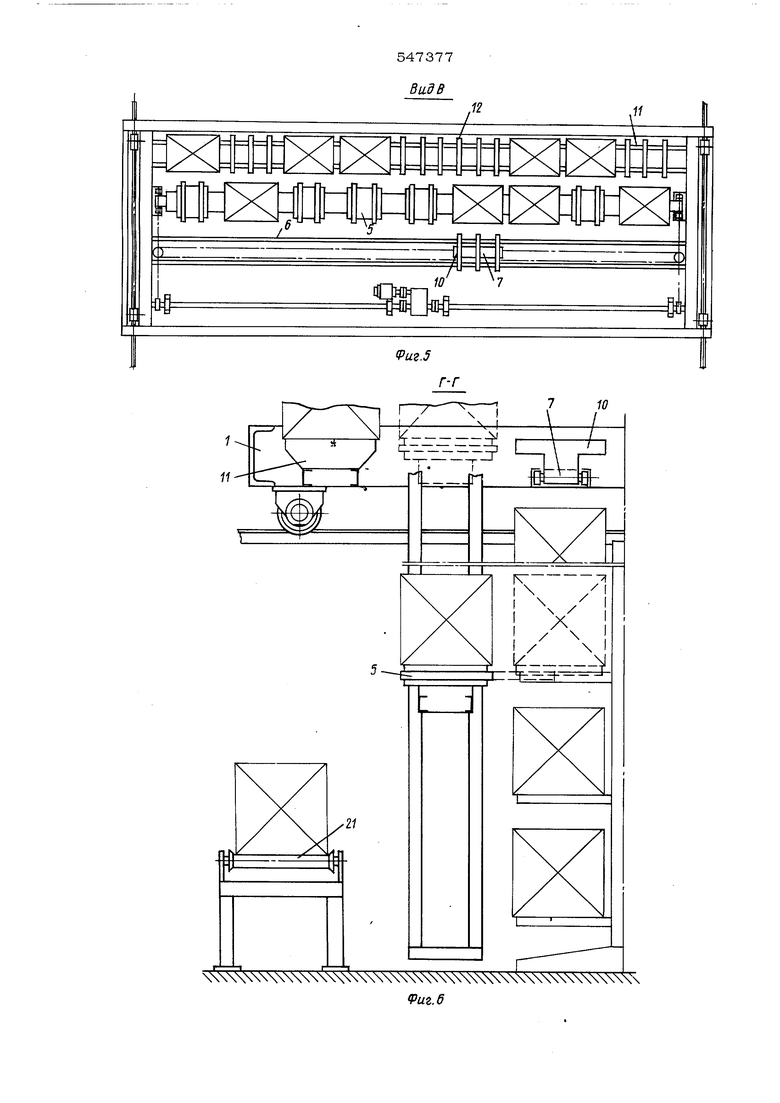
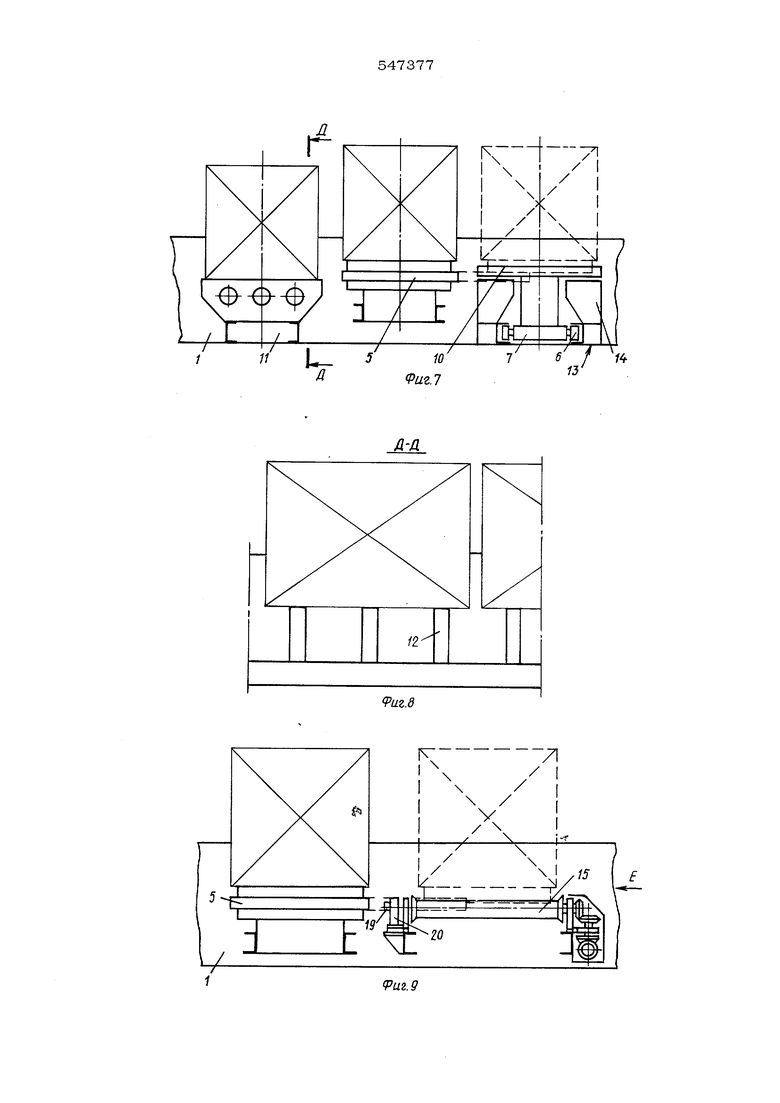
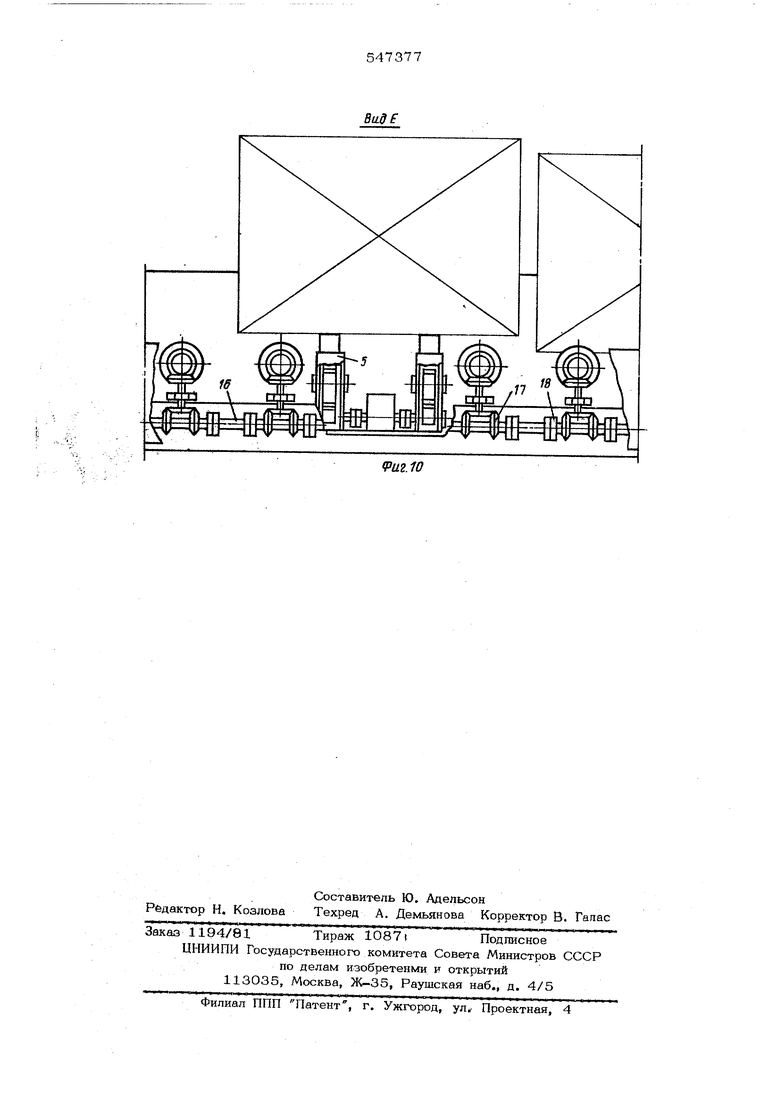
Изобретение относится к складскому оборудованию, а именно к устройствам, применяемым для обслуживания стеллажей многономенклатурных складов с выборочным комплектованием штучных грузов. Известны устройства для разгрузки и загрузки стеллажей штучными грузами, содержащие передвижную вдоль фронта стеллажей -металлоконструкцию с горизонтальной рамой, охватывающую стеллажи с торцов. В вертикальных направляющих металяокон;струкции подвижно установлен грузовой зах :ват, выполненный в виде башси, которая рас положена вдоль стеллажей. На балке смонтированы вьщвижные вилы, а на раме ме таллоконструкцин установлен накопитель ДЛЯ грузов. Цель изобретения - обеспечение воз- .можнрсти комплектования и накопления гру;ЗОВ. Это достигается установкой на горизон тальной раме устройства перекладчика грузов, снабженного грузонесущими планками, которые взаимодействуют с вилами захвата. Кроме того, перекладчик грузов выполнен в виде тележки, установленной в смонтированных на раме продольных направляющих, а грузонесущие планки закреплены на ней и выполнены в Ввде приводных подпружиненных и поворотных рьгчагов, связанных тягой. Грузонесущие планки могут быть жестко смонтированы на тележке перекладчика и выполнены в виде вертикальных ребер, высота которых больше высоты вьщвижных вил захвата. Накопитель может быть выполнен в виде двух рядов вертикальных ребер, между ки- торыми размещены направляющие тележки перекладчика, причем вертикальные ребра тележки установлены выше ребер накопителя. Кроме того, перекладчик может быть выполнен в виде смонтированногб на горизонтальной раме роликового конвейера, ролики которого снабжены независимыми реверсивными приводами. На фиг. 1 изображено -предлагаемое устр ойство} на фиг. 2 - разрез А-А на фиг.1} на фиг. 3 - узел I и вид по стрелке Б; на фиг. 4 - вариант конструкции с жесткой установкой груаонесущих планок в виде вертикальных ребер на тележке перекладчика; на фиг. 5 - вид по стрелке В на фиг. 4; на фиг. 6 - разрез Г-Г на фиг. 4; на фиг. 7 - вариант конструкции с совмещением накопителя и перекладчика; на фиг 8 - разрез Д-Д на фиг. 7; на фиг. 9 вариант конструкции с перекладчиком в виде роликового конвейера; на фиг. 1О - вид по стрелке Е на фиг. 9. Устройство для разгрузки и загрузки стеллажей штучными грузами содержит передвижную металлоконструкцию с горизонтальной рамой 1, перемещающуюся по рельсовым путям 2 вдоль фронта стеллажей и охватывающую их с торцов. В вертикальных направляющих 3 металлоконструкции установлен подъемный грузовой захват, представляющий собой балку 4, расположенную лдоль стеллажей. На балке захвата смонтированы выдвижные приводные вилы 5, которые в местах взаимодействия с грузами мо гут быть Выдвинуты независимо от других вил по обе стороны балки 4. На горизонтальной раме 1 металлоконструкции в продольных направляющих 6 установлен перекладчик грузов в виде тележки 7, снабженной грузонесущими планками, которые выполнены в виде приводных поворотных рыча гов 8, связанных тягой 9 и охватывающих груз сверху. В варианте конструкции, показанном на фиг. 4, грузонесущие планки жестко закреп лены на тележке 7 перекладчика и предста ляют собой вертикальные ребра 10, установленные с заданным шагом и высотой, обеспечивающими их взаимодействие с вьщвижными вилами 5 грузового захвата. На горизонтальной раме 1 металлоконструкции вдоль грузового захвата установлен накопи тель 11 для грузов, выполненныйкак и перекладчик, с вертикальными ребрами 12. В варианте конструкции, показанном на фиг. 7, помимо, накопителя 11 имеется накопитель 13, выполненный в виде двух рядов вертикальных ребер 14, между которыми установлены направляющие 6 тележки 7 перекладчика. Ребра 10 перекладчика рас положены выще ребер 14 накопителя. Направляющие 6 удлинены и выведены за пределы длины накопителя, и перекладчик может быть выведен из зоны накоппения грузов. При пакетном складировании грузов ис пользуются накопители 11 и 13, а при выборочном комплектовании только наколитель 11. В варианте конструкции, показанном н фиг. 9, перекладчик выполнен в виде рояикового конвейера, смонтированного на горизонтальной раме 1 металлоконструкции. Ролики 15 перекладчика имеют общий приводной вал 16 и связаны с ним при помощи конических зубчатых колес. Конические колеса 17, установленные на валу 16, могут отключаться от него все вместе или группами при помощи электромагнитных муфт 18. Кроме того, на валах 19 роликов 15 установлены тормозы 20. В местах приема грузов с выдвижных вил 5 грузового захвата ролики 15 могут реверсироваться и затормаживаться независимо от остальных. Устройство работает следующим образом. На роликовом столе 21 формируется комплект грузов. Между соседними грузами, например за счет установки отсекателей, оставляются зазоры, достаточные для выборочного съема грузов. Комплект грузов формируется на столе 21 в таком порядке, чтобы первая операция по загрузке стеллажа была произведена без перекладки грузов на грузозахватном органе. Грузы снимаются вьщвижными вилами 5 грузового захвата и поднимаются в габарит рамы 1 металлокострукции, которая для этого выполнена со сквозным проемом. Грузы транспортируются к заданному-межсгеппажному проходу и опускаются грузовым захватом до уровня загружаемой стеллажной полки. В соответствии с программой загрузки, учитывающей количество свободных мест на полках стеллажа, выдвигаются соответствующие вилы 5, и грузы за счет опускания грузового захвата устанавливаются в стеллажах. Если при последующей загрузке расположение оставшихся на грузовом захвате грузов не соответствует свободным местам-на очередной загружаемой полке, то грузовой захват поднимается в габарит верхней рамы 1, и в работу вступает перекладчик грузов. Тележка 7 перекладчика перемещается к заданному грузу, грузонесущие планки охватывают груз сверху и зажимают его с боковых сторон. Грузовой захват немного опускается, а вилы 5 с оставщимися грузами выдвигаются, освобождая путь для перемещения перекладчика с грузом к заданным выдвижным вилам 5. Если эти вилы заняты другим грузом, то DH предварительно перекладывается на свободные места. Такимже образом грузовой захват подготавливается к каждой последующей загрузке стеллажных полок. Устройство с порожним грузовым захватом возвращается к роликовому столу 21 для взятия следующего комплекта грузов или производит разгрузку стеллажей. Разгрузка стеллажей осуществляется аналогично описанному выше, но в обратном порядке. В варианте конструкции, показанном на фиг. 4, устройство работает следующим образом. Сформированный на роликовом столе 21 комплект разнотипных грузов забирается грузовым захватом, поднимается в верхнее положение и передается на накопитель 11. Вилы 5 выдвигаются над ребрами 12 накопителя, устанавливают на них груз за счет небольшого опускания грузового захвата и возвращаются в исходное положение, утапливаясь в промежутках между ребрами накопителя. Второй комплект грузов, взятый с роликового стола 21, остается на грузовом зах вате. Выдвижные вилы 5 взаимодействуют со стеллажами при их загрузке и разгрузке таким же образом, как было описано выще. После первой загрузки сталлажа и появлении порожних вил 5, при необходимости, производится перекладка грузов на захвате При этом выдвижные вилы 5 устанавливают груз на вертикальные ребра 10 перекладчика также за счет утапливания в промежутках между ребрами. При участии в перекладке накопителя од ни грузы снимаются.с него и устанавливаются на заданные выдвижные вилы, а другие грузы могут быть переданы на освободившиеся места накопителя. В варианте конструкции показанном, на фиг. 7, при выборочном комплектовании гру зов накопитель 13 не участвуют в работе. Перекладчика грузов происходит таким же образом, как было описано выще. Тележка перекладчика при этом перемещается меж ру рядами ребер 14 накопителя. При пакет ном складировании однородных грузов накопитель 13 используется для установки на него третьего пакета грузов. В этом случае перекладчик не участвует в работе и выдвигается за пределы длины накопителя. В варианте конструкции, показанном на фиг. 9, работа устройства совершается ана логично описанному выще. Отличие заключается лишь в том, что одновременно мо- жет перекладываться несколько грузов. На соответствующих участках роликового конвейера ролики 15 имеют правое или левое вращения в зависимости от того, какие из электромагнитных муфт 18 включены. Когда отдельные секции конвейера отключаются, точная остановка груза на роликах 15 осуществляется за счет взаимодействия тормозов 20 с валами 19 роликов перекладчика. В процессе выборочного комплектования устройство может обслуживать за один цикл один или несколько стеллажей. Пакетное складирование однотипных грузов производится без участия в работе перекладчика. Перекладчик в виде роликового конвейера при этом может быть использован как накопитель. Укладка однотипных грузов в стеллажи пакетами и их разгрузка осуществляются за счет одновременного выдвижения вил 5 грузового захвата. Устройство может также одновременно складировать грузы пакетами и производить их выборочное комплектование. Формул.а изобретения 1. Устройство для разгрузки и загрузки стеллажей штучными грузами, содержащее передвижную вдоль фронта стеллажей металлоконструкцию с горизонтальной рамой, охватывающую стеллажи с торцов, в вертикальных направляющих которой подвижно установлен грузовой захват, выполненный в виде балки, расположенной вдоль стеллажей, на которой смонтированы вьщвижные вилы, и установленйЬш ;а раме накопитель с вертикальными ребрами, о т л и ч а ющ е е с я тем, что, с целью возможности комплектования и накопления грузов, устройство снабжено перекладчиком грузов, установленным на горизонтальной раме и снабженным грузонесущими планками, взаимодействующими с вилами грузового захвата. 2.Устройство по п. 1, отлича ющ е е с я тем, что перекладчик выполнен в виде тележки, .установленной в смонтированных на раме продольных направляющих, а грузонесушие планки закреплены на ней и выполнены в виде приводных подпружиненных поворотных рычагов, связанных тягой. 3.Устройство по пп. 1 и 2, о т л ичающееся тем, что грузонесушие планки жестко смонтированы на тележке и выполнены в виде вертикальных ребер, высота которых больше высоты вьщвижных вил захвата. 4.Устройство по пп. 1иЗ, отличающееся тем, что накопитель выполнен в виде двух рядов вертикальных ребер, между которыми размещены направляющие тележки перекладчика, вертикальные ребра последней выще ребер накопителя. 5.Устройство по п. 1, отлича ющ е е с я тем, что перекладчик выполнен в виде смонтированного на горизонтальной раме роликового конвейера, ролики которого снабжены независимыми реверсивными приводами.
к
-Н(Ри-г.-/
V
PUZ.2
Узеп
/
ХХ
/
/ ,/
/
-J
/
r
/
Вид 6
2L
К/
/
/
N}
/
: -- ----1 .
Ч -
-г
II
/
/
V.
9иг.З
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для разгрузки и загрузки стеллажей склада штучными грузами | 1974 |
|
SU547378A1 |
| Устройство для разгрузки и загрузки стеллажей склада штучными грузами | 1974 |
|
SU547379A1 |
| Устройство для азгрузки стеллажей штучными грузами и разгрузки их | 1974 |
|
SU547376A1 |
| Устройство для разгрузки и загрузки стеллажей штучными грузами | 1974 |
|
SU562464A1 |
| Устройство для загрузки и разгрузки стеллажей склада штучными грузами | 1974 |
|
SU685569A1 |
| ПЕРЕГРУЖАТЕЛЬ ТАРНО-ШТУЧНЫХ ГРУЗОВ | 2000 |
|
RU2203213C2 |
| Устройство для загрузки и разгрузки стеллажейСКлАдА | 1979 |
|
SU839883A1 |
| Устройство для накопления и выдачи штуч-НыХ гРузОВ | 1978 |
|
SU835892A1 |
| УСТРОЙСТВО для ЗАГРУЗКИ и РАЗГРУЗКИ СТЕЛЛАЖЕЙ | 1973 |
|
SU391980A1 |
| Устройство для загрузки и разгрузки стеллажей | 1976 |
|
SU569504A2 |
ГТ 7 f-jr Л
fuz.6
V L- 7
л(Риг.7
I
/
/
I /
/
/
/
/
j
1У
9аг.8
7
r
/
xXI
г2
/ //5 I E
----J4
ZQ
Bu.de
иг. 10
