(54) УСТРОЙСТВО ДЛЯ РАЗГРУЗКИ И ЗАГРУЗКИ СТЕЛЛАЖЕЙ СКЛАДА ШТУЧНЫМИ ГРУЗАМИ
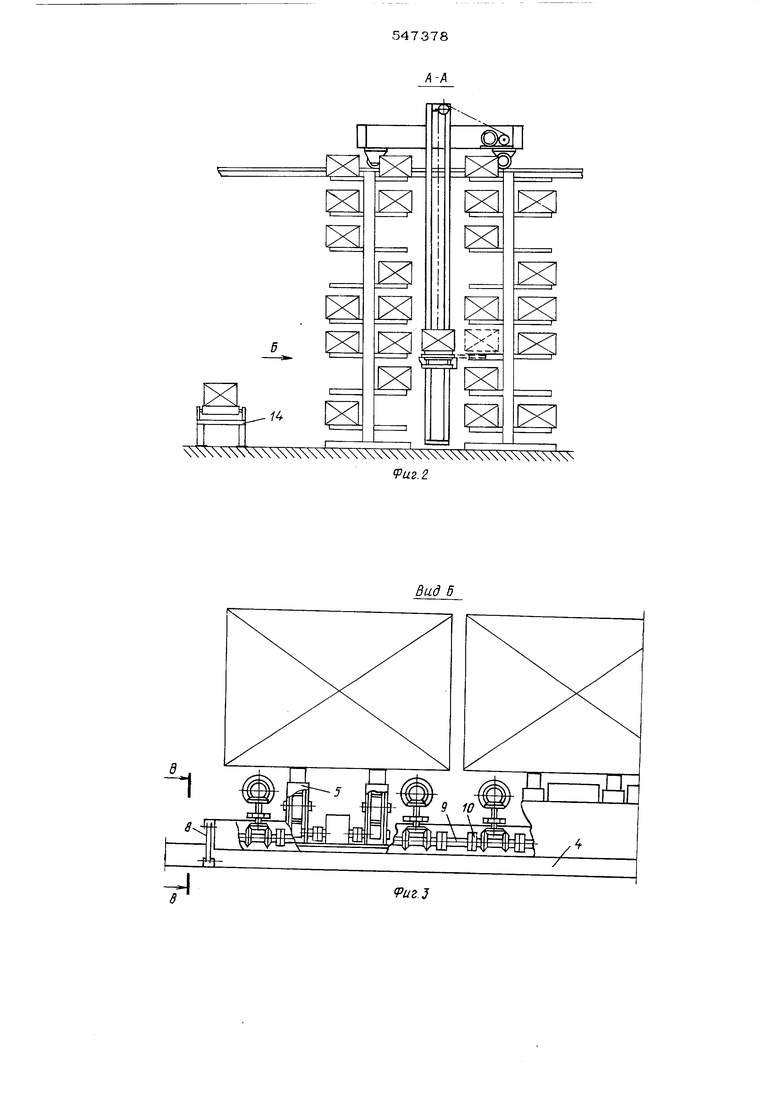
ных направпяющих 3 металлоконструкции, охватывающих стелпажи с торцов, устансжлен подъемный грузсжой захват, выполненный в виде балки 4, расположенной Эдоль стеллажей. На балке захвата смонтир1жаны приводные выдвижные вилы 5, которые в местах взаимодействия с грузами 1 ыйвигаются независимо от других вил, в это время не взаимодействующих с грузами/ в поперечном направлении от носительно балки захвата. На грузовом захвате см онтирован перекладчик грузов, выполненный в виде роликового конвейера, приводные ролики 6 которого установлены на раме 7. Рама роликового конвейера
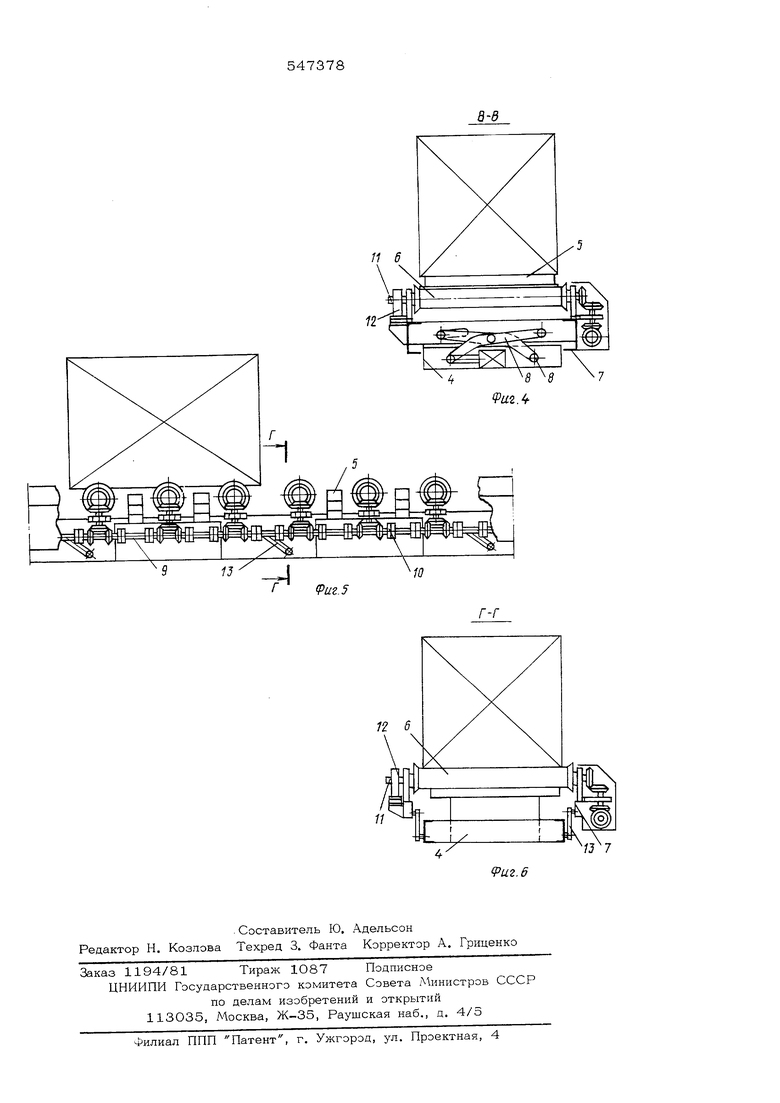
выполнена подвижной относительного балки . Привод вертикального перемещения рамы представляет собой шарнирно-рычажную систему 8, выполненную, например, в виде ножниц, показанных на фиг.4. Ролики конвейера имеют независимое вращение. Они связаны с общим приводным 9, расположенным по длине захвата с помшцыо конических зубчатых передач, кочтрыв могут быть отключены от приводноте вала все вместе или отдельными группами при помогли электромагнитных муфт 1О. того, на валах 11 ролике 6 установлены тормоза} 12, Такая конструкция обеспечивает реверсирование и заторма%еЬанне ролик ж по отдельности или группами независимо от остальных.
Как показано на фиг. 5, рама конвейера может имети привод вертикального пе- ремешения в виде шарнирно-рычажной сиетемы, например, типа четырехзвенника, образсдаанного рычагами 13, рамой конвейера и балкой захвата и обеспечивающего горизонтальное положение рамы при ее подъеме.
Устройство работает следующим образом.
При выборочная комплектовании на 14, выполненном, например, в виде приводного рольганга с консольными роликами, накапливается комплект разнотипных грузсю. Между соседними грузами за счет Например, установки отсекателей оставляются зазоры, достаточные для выборочного съема грузов при комплектовании. Ком гшект грузов формируется на столе в таком порядке, чтобы первая операция по загрузке стеллажа могла быть произведена без перекладки грузов на захвате. Грузы снимаются со стола выдвижными вилами 5 захвата | и поднимаются в габарит рамы 1 металлоконструкции, которая для этого выполнена со сквозным проемом. Грзы транспортируются к заданному степпажу и опускаются грузовым захватом до уроння заг))ужаемой стеллажной полки. В соответствии с программой загрузки, учитывающей количество свободных мест на полках стеллажа, выдвигаются соответствующие виль 5, и грузы при опускании захвата устанавливаются в стеллажах за счет взаимодействия выдвижных вил захвата с вилочной стеллажной полкой. Если при последующей загрузке расположение оставщися на грузовом захвате грузов не соответствует свободным местам на очередной загрузаемОй полке, то в работу вступает перекладчик грузов. Рама 7 роликового конвейера приподнимается посредством приводной шарнирно-рычажной системы, и ролики 6 снимают грузы с вил 5 захвата. Затем включаются соответствующие электромагнитные муфты 10, и заданные ролики 6 подключаются к приводному валу 9. При этом грузы на захвате перераспределяются. Точная остановка грузов на местах захвата, соответствующих- свободным местам на загружаемой полке стеллажа, осуществляется за счет взаимодействия тормозов 12с валами фоликов, перемещающих грузы. Рама 7 роликсжого конвейера опускается, грузы устанавливаются На выдвижные вилы 5 и загружаются ими в стеллаж. Таким же образом грузовой захват псдготавливается к каждой последую.щей загрузке стеллажных полок. Устройство с порожним захватом возвращается к столу 14 для взятия следующего комплекта грузов или производит разгрузку стеллажей, которая осуществляется аналогично описанному выще, но в обратной послед (жательности. 1В процессе работы устройство может обслуживать за один цикл один или несколько стеллажей.
Пакетное складирование грузов производится без участия в работе перекладчика. Укладка однотипных грузов в стеллажи пакетами и их разгрузка осуществляется за счет однсшременного выдвижения вил грузсжого захвата.
Описанная выше конструкция устройства предпочтительна для практического примеменения. Однако могут быть и другие варианты конструкции. Например, металлоконструкция устройства может быть портального, напольного, подвесного или мостового типа. Вертикальные направляЪщие металлоконструкции могут выполнены телескопическими пли складывающимися пс типу шорнбергских ножниц. В горизонтальной раме металлоконструкции могут быть установлены накопители для грузов вилочного типа или с вертикальными грузонесущими ребрами. Приводы перемещения рамы роликсжого конвейера,и вращения роликов могут быть выполнены иными. Устройство может одновременно укладьтать разнотипные грузы в порожние стеллажи и производить их выборочную отгруэ- 5 ку со склада. Устройство может быть использовано для обслуживания как стационарных, так и передвижных стеллажей на складах с любым ассортиментом тарно-штунных грузов, Q а также на складах листовых материале, длинномерных и крупногабаритных грузе. Формула изобретения 1. Устройство для разгрузки и загруэки стеллажей склада щтучными грузами, содержащее передвижную вдоль склада металлоконструкцию с горизонтальной рамЫ и вертикальными направляющими, охваты- 5 веющими стеллажи с торнов, в которых подвижно установлен грузов(й захват, выполненный в виде балки, расположеннсй вдоль стеллазкей, на которой смонтированы выдвижные вилы и перекладчик грузе, выполненный в ввде роликового конвейера с независимьп вращением ролике®, отличающееся Tevj, что, с целью накоп ления грузов на захвате и повыщения про-г изводительности комплектования, рама роликового конвейера подвижно смонтирована на бачке захвата и связана с приводом :ее вертикального перемещения. . 2. Устройство по п. 1, отличаю щ е е с я тем, что привод вертикального перемещения рамы ролик(жого конвейера выполнен в виде щарнирно-рычажнсй) системы, например, типа ножниц, или шарнирнсйго четырехзвенника.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для разгрузки и загрузки стеллажей штучными грузами | 1974 |
|
SU547377A1 |
| Устройство для разгрузки и загрузки стеллажей склада штучными грузами | 1974 |
|
SU547379A1 |
| Устройство для загрузки и разгрузки стеллажей склада штучными грузами | 1974 |
|
SU685569A1 |
| Устройство для азгрузки стеллажей штучными грузами и разгрузки их | 1974 |
|
SU547376A1 |
| Устройство для разгрузки и загрузки стеллажей штучными грузами | 1974 |
|
SU562464A1 |
| Устройство для загрузки и разгрузки стеллажейСКлАдА | 1979 |
|
SU839883A1 |
| ПЕРЕГРУЖАТЕЛЬ ТАРНО-ШТУЧНЫХ ГРУЗОВ | 2000 |
|
RU2203213C2 |
| Устройство для накопления и выдачи штуч-НыХ гРузОВ | 1978 |
|
SU835892A1 |
| Устройство для загрузки и разгрузки стеллажей | 1972 |
|
SU439451A1 |
| Устройство для загрузки и разгрузкиСТЕллАжЕй | 1979 |
|
SU819017A1 |
. / -f
