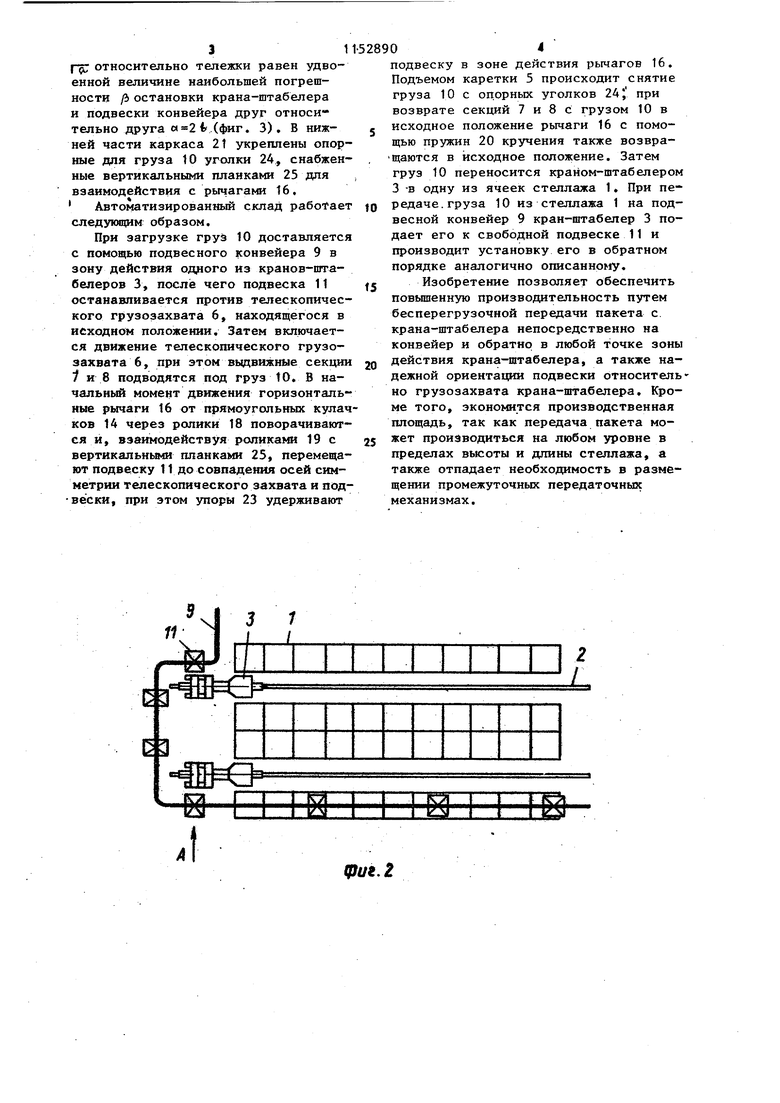
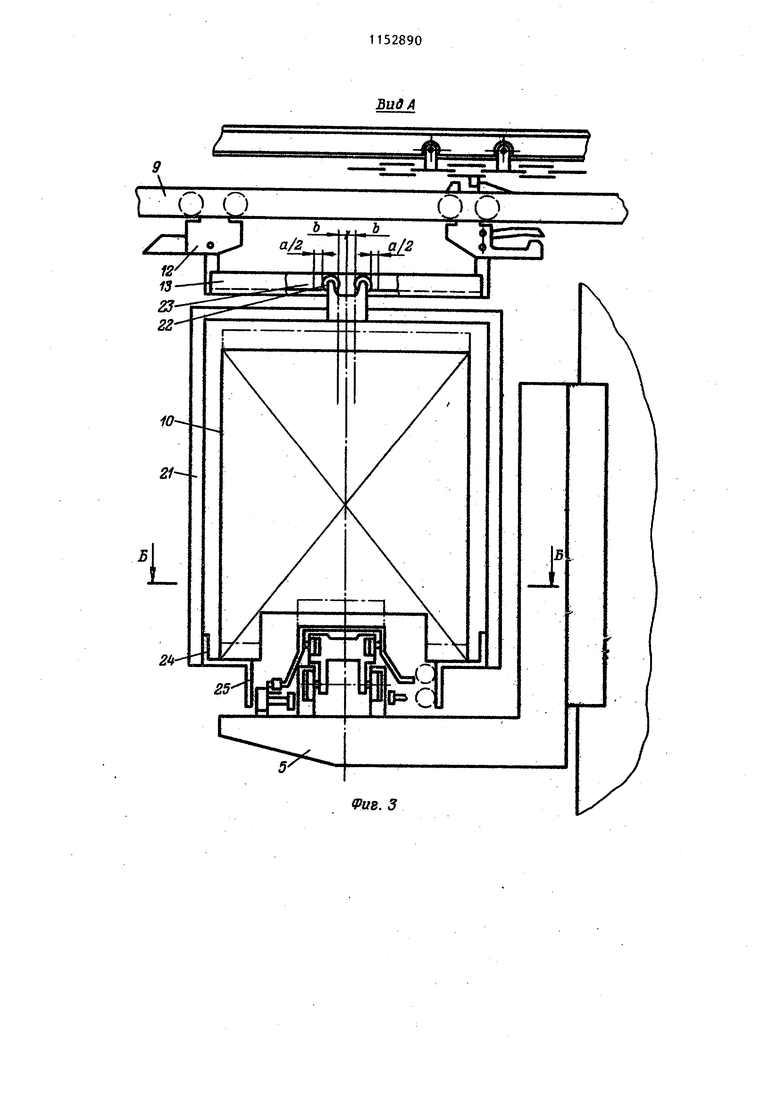
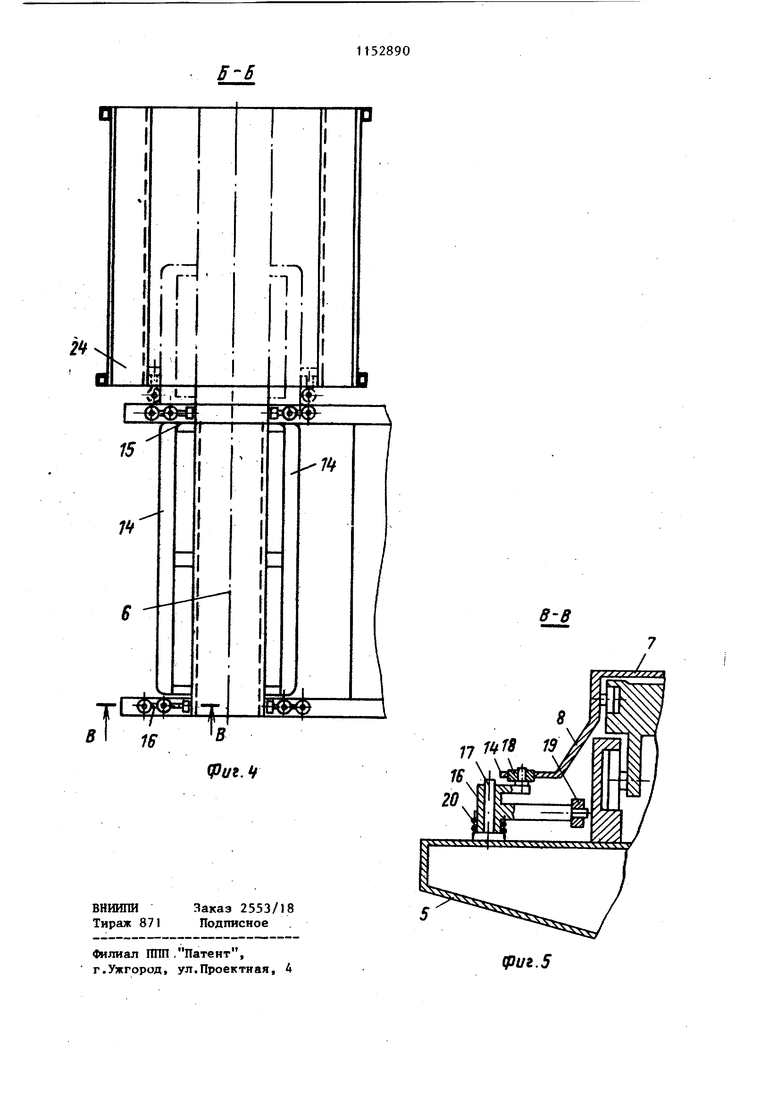
Изобретение относится к устройствам для хранения изделий, а именно к складским устройствам с приспособлениями для подачи изделий к месту выгрузки и может быть использовано в складских хозяйствах на предприятиях Л5обой отрасли. Известен склад с устройством для комплектовки и перегрузки хранимых в стеллажах грузов, содержащий приемный и возвратный конвейеры, расположенные рдин над другим, и два подъемных стола, один из которых расположен в начале приемного, а другой - в конце возвратного конвейеров Cl . Это устройство обеспечивает накоп ление и передачу грузов на склад и обратно, а также сокращение времени возврата каждой единицы тары с грузом в ячейки стеллажей. Однако общая производительность устройства недостаточна ввиду необходимости промежу точных перемещений тары по приемному и возвратному конвейерам и подъемньм стояам. Кроме того, наличие зтих механизмов требует дополнительной производительности площади,. Известен также автсжатизированный склад для хранения штучных грузов, содержащий многоярусные стеллажи, установленный в проходах между стелл жами по крайней мере один кран-штабе лер с телескопическим грузозахватом на его грузоподъемнике и тележечный конвейер с подвесками для подачи гру зов к стеллажам С23. Недостатком известного склада явл ется необходимость при непосредствен ном взаимодействии захвата крана-шта белера с подвеской дополнительных манипуляций для точного останова крана-штабелера, что увеличивает цик перегрузки груза с подвески конвейера на захват крана-штабёлера. Цепь изобретения - повышение производительности. Цель достигается тем, что в автоматизированном складе для хранения штучных грузов, содержащем многоярус ные стеллажи, установленные в проходах между стеллажами по крайней мере один кран-штабелер с телескопическими грузозахватами на его грузоподъемнике и тележечный конвейер с подвескаьш для подачи грузов к стеллажам, кран-щтабелер снабжен устройством для ориентации подвески относительно грузозахвата, включающим в себя смонтированные на раме грузоподъемника по концам захвата с его боковых сторон жестко связанные между собой и закрепленные одними концами на одной вертикальной оси подпружиненные горизонтально расположенные друг над другом стержни , разной длины с poликa в на свободных концах и кулачки для взаимодействия с роликами верхних стержней, закрепленные по всей длине боковых сторон вьщвижной платформы грузозахвата, а подвеска установлена на тележке конвейера подвижно между смонтированными на ее раме упорами и снабжена вертикально расположенньми поперек нее планками для взаимодействия с роликами нижних стержней. На фиг. 1 схематически изображен предлагаемый автоматизированный складна фиг. 2 - то же, вид в плане} на фиг. 3 - вид А на фиг. 2, на фиг. 4 разрез Б-Б на фиг. 3- (тонкими линиями показано положение телескопического грузозахвата и рычагов при взятии или установке груза на подвеску); на фиг. 5 - разрез В-В на фиг. 4. Автоматизированный склад содержит многоярусные стеллажи 1, в проходах между которыми на рельсовых путях 2 установлены стеллажные краныштабелеры 3, имеювд1е мачту 4 с подъемно-опускной кареткой 5, оборудованной телескопическим грузозахватом 6 (фиг. 1 и 2) с вьщвижнь ш секциями 7 и 8 (фиг. 5). В торце стеллажей 1 размещена трасса подвесного толкающего тележечного конвейера 9, имеющего подвески для грузов 10, Подвески 11 установлены на тележках 12 при помощи траверсы 13. В отличие от известного устройства кран-штабелер 3 снабжен укрепленными на В здвижной секции 8 телескопического грузозахвата 6. прямоугольными кулачками 14. Против их торцовых кромок 15 смонтированы поворотные в горизонтальной плоскости рычаги 16, установленные на осях 17 и имеющие на концах ролики 18 и 19. Рычаги 16 имеют пружины 20 кручения, прижимающие ролики 19 к торцовым кромкам 16 кулачков 14 (фиг, 4 и 5). Подвеска t1 состоит из каркаса 21 (фиг, 3), который установлен на роликах 22 между упорами 23 на траверсе 13 коивейера 9. Ход подвески 1 Р5Г относительно тележки равен удвоенной величине наибольшей погрешности /5 остановки крана-штабелера и подвески конвейера друг относи тельно друга (фиг. 3), В нижней части каркаса 21 укреплены опорные для груза 10 уголки 24, снабженные вертикальными планкают 25 для взаимодействия с рычагами 16, Автоматизированный склад работает следующим образом. При загрузке груз 10 доставляется с помощью подвесного конвейера 9 в зону действия одного из кранов-штабелеров 3, после чего подвеска 11 останавливается против телескопического грузозахвата 6, находящегося в исходном положении. Затем включается движение телескопического грузозахвата б, при этом выдвижные секции i и 8 подводятся под груз 10. В начальный момент движения горизонтальные рычаги 16 от прямоугольных кулач ков 14 через ролики 18 поворачиваются и, взаимодействуя роликами 19 с вертикальнее планками 25, перемещают подвеску 11 до совпадения осей симметрии телескопического захвата и подвески, при этом упоры 23 удерживают 0 подвеску в зоне действия рычагов 16. Подъемом каретки 5 происходит снятие груза 10 с оцорных уголков 24 J при возврате секций 7 и 8 с: грузом 10 в исходное положение рычаги 16 с помощью пружин 20 кручения также возвращаются в исходное положение. Затем груз 10 переносится краном-штабелером 3 -в одну из ячеек стеллажа 1. При передаче, груза 10 из стеллажа 1 на подвесной конвейер 9 кран-штабелер 3 подает его к свободной подвеске 11 и производит установку его в обратном порядке аналогично описанному. Изобретение позволяет обеспечить повышенную производительность путем бесперегрузочной передачи пакета с крана-штабелера непосредственно на конвейер и обратно в любой точке зоны действия крана-щтабелера, а также надежной ориентации подвески относительно грузозахвата крана-штабелера. Кроме того, экономится производственная площадь, так как передача пакета может производиться на любом уровне в пределах вьюоты и длины стеллажа, а также отпадает необходимость в размещении промежуточных передаточных механизмах.
| название | год | авторы | номер документа |
|---|---|---|---|
| Склад для штучных грузов на поддонах | 1977 |
|
SU691360A1 |
| Грузоподъемная площадка крана-штабелера | 1985 |
|
SU1283199A1 |
| Кран-штабелер | 1982 |
|
SU1055696A1 |
| Автоматизированный склад для хранения пакетированных грузов | 1973 |
|
SU591360A1 |
| Склад для хранения шин | 1986 |
|
SU1404419A1 |
| Кран-штабелер для двустороннего обслуживания многоярусных стеллажей | 1976 |
|
SU570533A1 |
| Высотный кран-штабелер | 1979 |
|
SU844518A1 |
| КРАН-ШТАБЕЛЕР,Ф011ДЗ.;:.о^йа| | 1973 |
|
SU390002A1 |
| Автоматизированная транспортно-накопительная система | 1985 |
|
SU1306690A1 |
| Склад для хранения штучных грузов | 1977 |
|
SU735494A1 |
АВТОМАТИЗИРОВАННЫЙ СКЛАД ДЛЯ ХРАНЕНИЯ ШТУЧНЫХ ГРУЗОВ, содержащий многоярусные стеллажи, установленный в проходах между стеллажами по крайней мере один кран-штабелер с телескопическими грузозахватами на его грузоподъемнике и тележечный конвейер с подвесками для подачи грузов к стеллажам, отличающийся тем, что, с целью повыше- , ния производительности, кран-штабелер снабжен устройством для ориентации подвески относительно грузозахвата, включающим в себя смонтирбванные на раме грузоподъемника по концам захвата с его боковых сторон жестко связанные между собой и закрепленные одними концами на одной вертикальной оси подпружиненные горизонтально расположенные друг над другом стержни разной длины с роликами на свободных концах и кулачки для взаимодействия с роликами верхних стержней, закрепленные по всей длине боковых сторон выдвижной платформы грузозахвата, а подв.еска устаО) новлена на тележке конвейера подвижно между смонтированными {la ее раме упорами и снабжена вертикально расположенными планками для взаимодействия с роликами нижних стержней. А4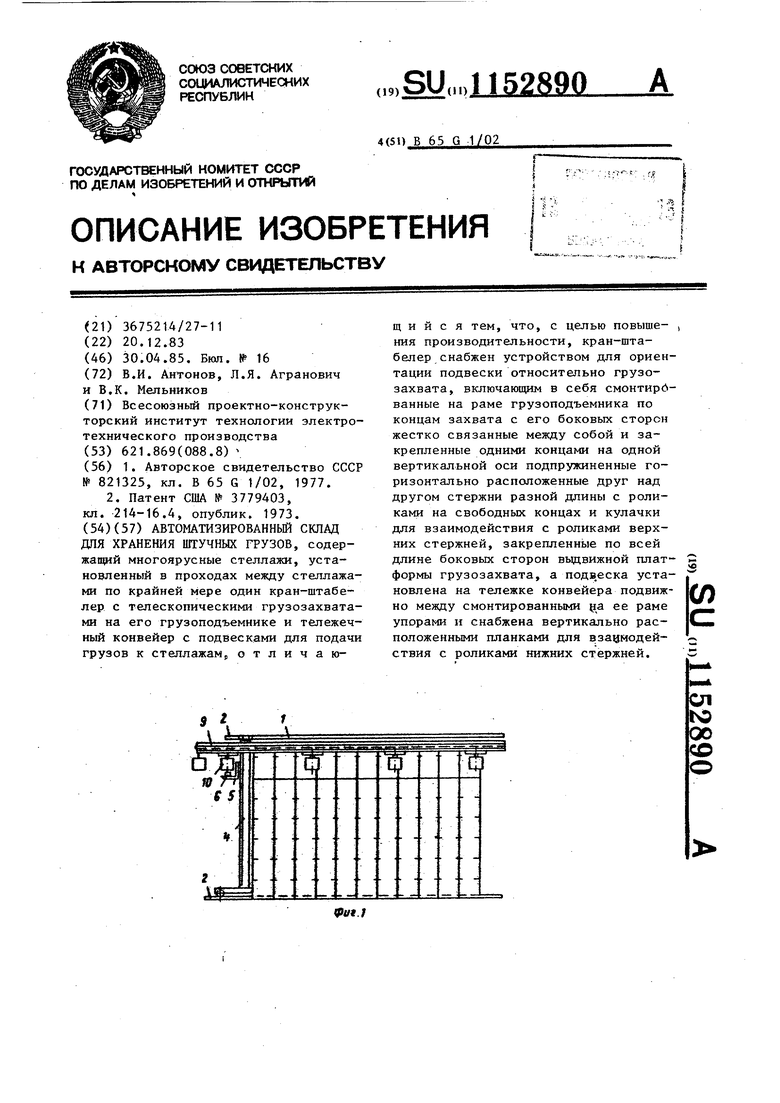
PU8. 3
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для комплектовки и пере-гРузКи ХРАНиМыХ B СТЕллАжАХ гРузОВ | 1974 |
|
SU821325A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США № 3779403, кл | |||
| Устройство для вытяжки и скручивания ровницы | 1923 |
|
SU214A1 |
| Приспособление для склейки фанер в стыках | 1924 |
|
SU1973A1 |
