Настоящее изобретение относится к вычислительной технике и дискретной автоматике и может быть использовано для создания информационно-управляющих подсистем мехатроники и робототехники, летательных аппаратов, измерительных систем, систем оборонного комплекса и других средствах автоматизации технологических процессов.
Известны управляющие автоматы (УА) с самоконтролем состояний на основе применения кодов Хемминга, Грея, Бергера, кСn. Во всех УА кроме управляющего автомата (УА) с кодом кСn, общее количество n разрядов разделяется на 2 независимые части: информационных разрядов (m) и контрольных (n-m). Значения контрольных разрядов определяются по-разному в зависимости от типа кода. Для кодов Хэмминга контрольные разряды размещаются на 1, 2, 4, 8, 16 позициях разрядной сетки [1-5].
При получении (m) информационных разрядов вычисляются значения контрольных разрядов для сравнения с контрольными разрядами при безошибочной передаче. Контроль основан на предположении, что при передаче сообщения ошибка может быть только в информационных разрядах, но не в контрольных.
Особенность равновесного кода кСn заключается в наличии только (к) единиц во всех (n) разрядах кода. Для представления кода состояний a(t) используется конкатенация двух кодов: (2С5, 2С5); (2С5, 3С7); (3С7, 3С7).
В коде 2С5 из 32 комбинаций только 10 разрешенных с двумя единицами в пяти разрядах, а в коде 3С7 из 128 комбинаций только 25 разрешенных. При поступлении реального кода a(t), который может быть искаженным, нужно определить относится ли этот код a(t) к числу разрешенных. Комбинационные схемы для такой процедуры сложны [1-4].
Эти варианты управляющих автоматов Мура с контролем (фиг. 1) рассматриваются как аналоги. Их недостатком является сложность подсистем встроенного контроля УА за счет ввода (n-m) разрядов с аппаратной реализацией алгоритма декодирования.
Управляющие автоматы Мура (УАМr) разделяются на сверхпростые (СП), простые (ПА), средней сложности (СА), сложные (АС), высокой сложности (ВС), особо сложные (ОС) и ультрасложные (УС).
Объем схемы переходов (V) УА Мура (табл. 1) при реализации на ПЗУ V=mp2m+q. Значение (m) выбирается из условия N≤2m; N - количество состояний a(t); q - количество логических условий α1…αq; mp - реальная разрядность ПЗУ (ОЗУ) равная 4 или 8. При реализации F1(1) на ПЛМ число входов ПЛМ равно n≥m+q. Символами Q и К обозначены характеристики УА нового типа (УАМх) [6, 7], где Q=V/W=2q-1, K=(m+q)/(m+1), W - объем ПЗУ УАМх, W=mp2m+1.
При описании настоящего изобретения, используются следующие обозначения и сокращения:
ГСА - граф-схема алгоритма управления;
УА - управляющий автомат;
СУА - самоконтролируемый УА;
УАМr - УА Мура;
УАМL - УА Мили;
УАМХ - УА Мухопада.
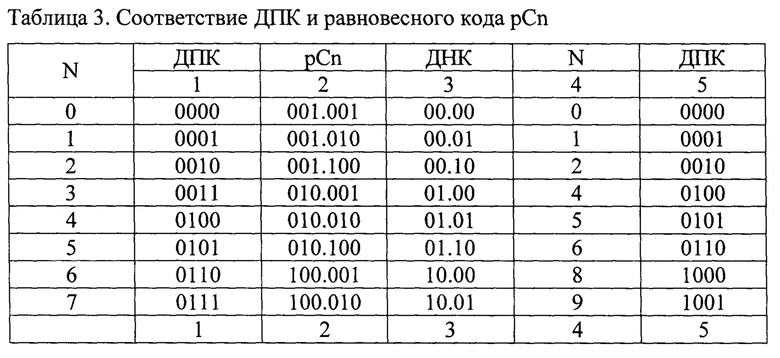
Известен самоконтролируемый управляющий автомат фиг. 2 (полезная модель №63588 БИ №15, 2006) [5], в котором в структуру управляющего автомата Мура (УАМr) введен блок контроля с измененным принципом кодирования предыдущего a(t) и последующего a(t+1) состояний. Этот УА [5] рассматривается как прототип. На фиг. 2 CD(7) - шифратор (кодер) преобразующий многоразрядный код pCn в двоичный позиционный код (ДПК). В прототипе предыдущие состояния a(t) по прежнему могут кодироваться двоичным позиционным кодом, в котором разрядность (m) определяется из соотношения N≤2m, где N - количество состояний УАМr. Последующее состояние a(t+1) кодируется особым кодом из р трехразрядных групп (pCn), причем в каждой группе только одна «1». Правило перевода ДПК в pCn приведено в таблице 2.
Если в ДПК в двух разрядах встречается комбинация 11, то на месте соответствующих разрядов производится запись 001 или 100 и перенос в следующий старший разряд. Соотношение кодов ДПК и pCn представлено в таблице 3 (столбцы 1-3), а в столбцах 4-5- непозиционный двоичный код (ДНК) соответствующий коду pCn.
В прототип УА введено (к) схем контроля, регистрирующих правильность кода каждой из трехразрядной группы.
Недостаток прототипа в том, что для представления кода состояний необходимо увеличить число состояний УА в 1,5 раза по сравнению с числом разрядов аналога. Кроме того, ввод шифратора и блока проверки правильности кода из (к) трехразрядных групп усложняет реализацию при слишком большом объеме ПЗУ схемы переходов.
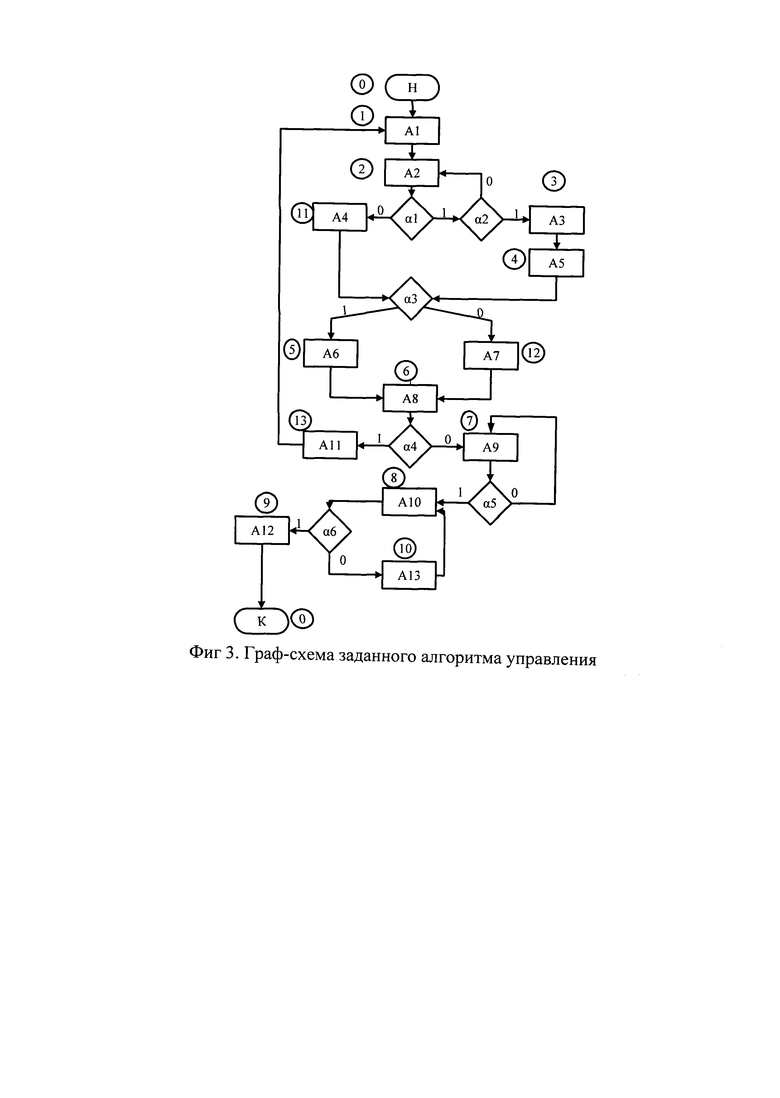
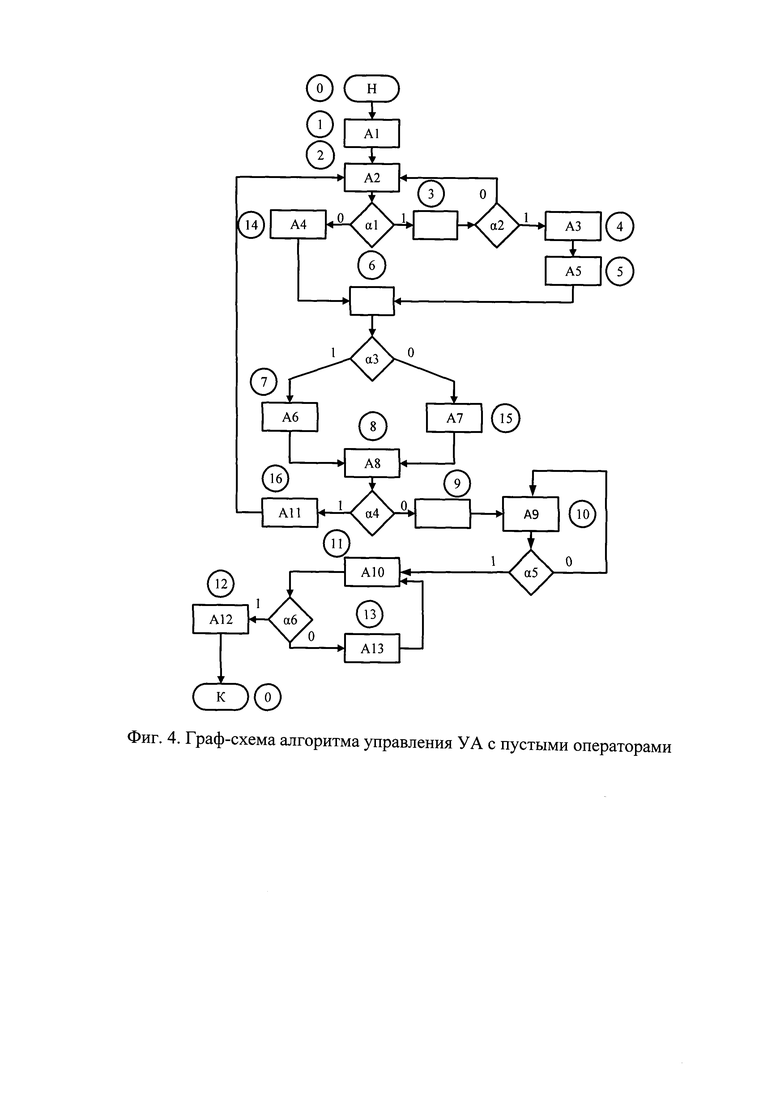
Целью настоящего изобретения является уменьшение количества элементов и снижение сложности блока контроля управляющего автомата с контролем состояний. Для аппаратной реализации предлагаемого изобретения перед абстрактным синтезом УА в граф-схему алгоритма управления (ГСА) - фиг. 3 вводятся пустые операторы (фиг. 4), которые обозначены также, как и операторы действия А0…Ак, но без номера.
Пустые операторы (Ап) вводятся:
- если к логическому оператору ∝j передается управление от двух (или более) других операторов;
- для ликвидации петель;
- для ограничения количества входов к любому оператору до двух;
- если между αi и ∝j нет операторов действия. Последнее условие использовалось раннее в патентах на полезную модель [5, 6].
По ГСА фиг. 4 получен граф переходов фиг. 5. Преобразование ГСА через ввод пустых операторов обеспечивает выбор только одного (единственного) значения αj∈{α} для F1(1) и возможность использования счетчика вместо регистра памяти состояний a(t).
Анализ графа переходов фиг. 5 позволяет выделить непрерывную последовательность переходов:  . Если произвести замену переменных
. Если произвести замену переменных  , то все последовательные переходы будут осуществляться по условию ∝(β)=1. Тогда условие прибавления «1» к коду счетчика (γ) запишется в виде γ=∝(а0 +…+ а11). После минимизации по карте Карно фиг. 6 значение γ запишется в виде:
, то все последовательные переходы будут осуществляться по условию ∝(β)=1. Тогда условие прибавления «1» к коду счетчика (γ) запишется в виде γ=∝(а0 +…+ а11). После минимизации по карте Карно фиг. 6 значение γ запишется в виде:  Переходы вне счетчика представлены в табл. 4. Структурная схема УА с контролем состояний (изобретение) представлена на фиг. 7.
Переходы вне счетчика представлены в табл. 4. Структурная схема УА с контролем состояний (изобретение) представлена на фиг. 7.
Описание предлагаемого изобретения в статике
Управляющий автомат с контролем состояний, содержащий последовательную цепь блоков в виде первой комбинационной схемы переходов F1(1), первого регистра памяти Рг(2) состояний a(t+1), дешифратора состояний DC(3), схемы формирования исполнительных команд F2(4), объекта управления ОУ(5), второго регистра Рг(6) памяти значений логических условий, выходы которого соединены с первыми входами (α1…αq) комбинационной схемы переходов F1(1); содержащий также третий регистр Рг(7) памяти состояний a(t+1), соединенный входами с выходами комбинационной схемы переходов F1(1), а выходы регистра Рг(7) соединены со входами блока элементов «И» (8); управляющий автомат с контролем состояний, отличающийся тем, что дополнительно введен суммирующий счетчик Сч(9) состояний a(t) параллельные входы которого парафазно соединены с выходами схемы элементов «И»(8), а кодовые выходы через дополнительно введенный второй дешифратор DC(10) соединены со вторыми входами схемы переходов F1(1); введена также непрерывная цепочка в виде блока определения признака (γ) БО(11) необходимости изменения состояния счетчика Сч(9), первого RS-триггера (12), единичный выход которого через первый элемент «И» (13) соединен со счетным входом счетчика Сч(9), а выходы первого RS-триггера(12) через вторые элементы «И» (14), и элементы «ИЛИ» (15) парафазно связаны со входами второго RS-триггера (16), единичный выход которого связан с дополнительным входом блока синхронизации БС(17) со входами «Пуск» (18), «Останов» (19) и выходами в виде двух сигналов синхронизации τ1 и τ2 (20); содержащий также блок контроля БК (21).первые входы которого связаны с выходами первого регистра памяти Рг(2), а вторые входы связаны с кодовыми выходами счетчика Сч(9); содержащий также блок восстановления БВ(22) состояния a(t) автомата, кодовые выходы блока БВ(22) связаны с выходами первого регистра памяти Рг(2), а одноразрядный дополнительный вход блока БВ(22) связан с единичным выходом второго RS-триггера (16); выходы блока восстановления БВ(22) связаны с третьими кодовыми входами блока контроля БК(21).
Анализ структурной схемы предлагаемого изобретения (фиг. 7) позволяет сделать следующие заключения:
1. В предлагаемом изобретении используется унитарный (унарный) код для представления состояний а(х);
2. Вместо регистра состояний a(t) используется суммирующий счетчик Сч(9);
3. Введена последовательность блоков БО(11), RS-триггер (12), схема «И» (13) для определения признака γ необходимости прибавления «1» к содержимому счетчика;
4. Введен второй дешифратор DC(10) для перевода ДПК в унитарный код;
5. Введены элементы «И» (14), «ИЛИ» (15) для переноса состояния RS-триггера (12) на дополнительный RS-триггер (16). RS-Триггер (16) дает возможность хранить предыдущее значение γ(t-1) или текущее значение γ для дальнейших вычислений. Необходимость учета значений γ(t-1) связана с тем, что для некоторых состояний имеющих два входа (для графа фиг. 5 это переходы 6, 8, 9, 11) один вход соответствует γ(t-1)=1, а другой γ(t-1)=0 (табл. 5).
6. Введен блок восстановления БВ(22), определяющий значение a(t) по конкатенации γ(t-1) с кодом a(t+1), обозначенное как a(t)1.
Блок синхронизации БС(17) как и в типовом УА Мура по сигналу «пуск» (18) генерирует два импульса τ1, τ2 причем τ1(t)&τ2(t)=∅.
Функциональная структура схемы переходов F1(1) определяется через реализацию системы булевых функций (СБФ) y1…ym, полученную по таблице переходов 4 вне счетчика в виде формул (1):

Как видно из анализа СБФ y1…y5 из 32-х выходов DC (3) используется только 1/3 часть, обозначенная в виде подмножества {R}.
R={3,4,6,7,9,11,12,14,15,16}.
В таблице 5 дана оценка числа двухходовых элементов «И» и элементов «ИЛИ (при 4-х и 2-х входах), необходимых для реализации СБФ.
Функциональная схема реализации СБФ y1…y5 тривиальна и поэтому не приводится.
Реализация всех блоков кроме БК1(21) и БВ(22) известна.
Примечание: Блоки F2(4) и ОУ(5) проектируются после конкретно заданного объекта управления (электропривод, электронно-измерительное, вычислительное устройство и др.).
Блок контроля БК(21) состоит из двух схем: схемы сравнения кодов СхСр(23) и управляющего автомата УА(24).
Блок восстановления БВ(22) состоит из вычитающего счетчика Сч(46) и схемы СП(47) определения состояний a(t) по коду a(t+1) при γ(t-1).
Схема сравнения (фиг. 8) реализуется с использованием четвертого и пятого регистров РгII(25) и РгIII(26), единичные выходы которых через схемы сложения ⊕(27) по mod2 и элемент «И-НЕ» (28) подаются на единичный вход третьего RS-триггера(29).
Функционирование контролируемого автомата реализуется совместно с контролем правильности переходов:
1. Перед началом опроса схемы переходов F1(1) счетчик Сч(9) и регистр Рг(6) устанавливаются в «0» состояние, а триггер RS(16), хранящий значение γ (t-1) в состоянии «1».
2. После опроса F1(1) с получением кода (t+1) на Рг(2) и Рг(7) запоминается значение a(t) при котором получена a(t+1). Это состояние a(t) обозначается как a(t)0.
3. Определяется a(t)1, которое фактически должно быть при данном a(t+1) в случае правильного перехода.
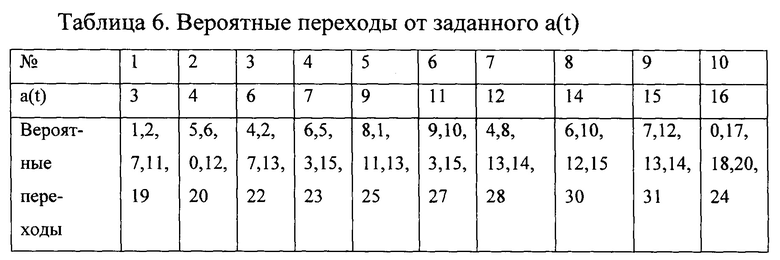
Неправильное значение a(t+1) может появиться за счет внутренних и внешних помех. Наиболее вероятны изменения только в одном разряде, но даже в этом случае состояния {R} будут искажены в соответствии с табл. 6.
4. Если будет зафиксировано a(t)1≡a(t)0, то настоящий переход a(t) к a(t+1) реализован правильно. Тогда необходимо формировать последовательность сигналов синхронизации для исполнения всех команд управления А0…Ак.
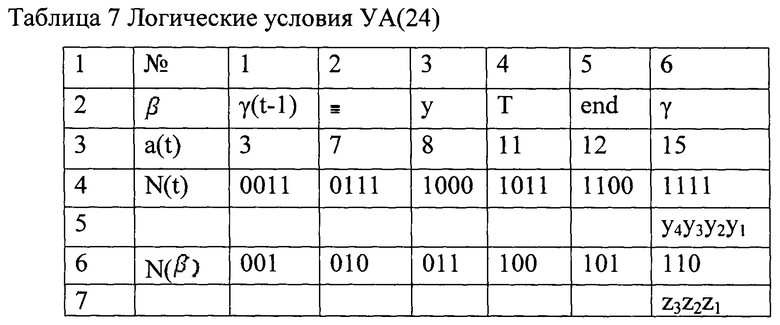
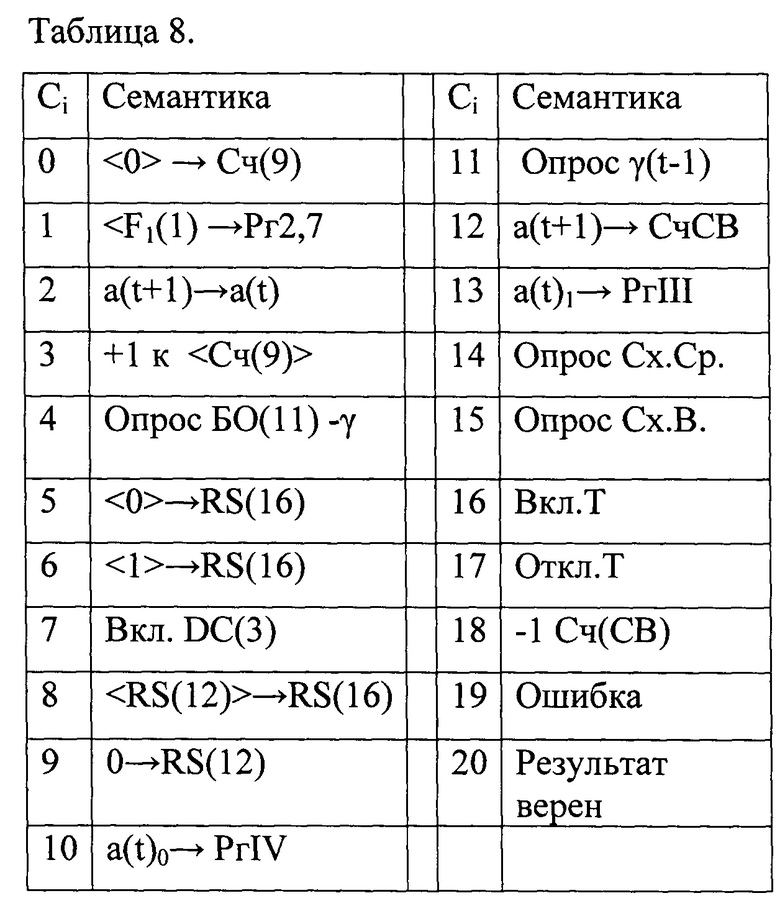
Управляющий автомат УА(24) блока контроля БК(21) реализуется по структурной схеме патента (фиг. 9) на полезную модель [5] по ГСА фиг. 10 с графом фиг. 11 и таблицей переходов из a(t) в а(+1). Адреса логических условий β1…β6 с кодами z3z2z1 определяются по табл. 7. Семантика синхросигналов С0…С20 представлена в табл. 8. В столбце 2 табл. 8 символом У указана необходимость формирования команд длительностью Т>>τ как в УАМr.
Для абстрактного синтеза УА(24) фиг. 9 также вводятся пустые операторы в отдельные ветви ГСА, что дает возможность выбора одного (единственного) значения логического условия через мультиплексор М(36). Адрес логического условия определяется через третью комбинационную схему F3(40) с фиксацией кода адреса на регистре Рг(41). По этой схеме объем ПЗУ схемы переходов F1(30) УА (24) определяется как W=mp2m+1.
В автомате УА(24) код адреса мультиплексор М(36) определяется по табл. 9 через СБФ(2):

Схема реализации СБФ(2) приведена на фиг. 12.
Управляющий автомат УА(24) относится к типу простых автоматов (ПА) т.к. N=21, m=5, mp=8, q=6. Тогда W=mp2m+1=8*25+1=29=0.5 кб.
Для восстановления предыдущего состояния a(t) по коду состояния a(t+1) введен специальный блок восстановления БВ(22) с вычитающим счетчиком. Для того, чтобы не путать состояния, являющиеся результатом различных операций введены следующие обозначения состояний:
- a(t)0 - при γ(t-1) по которому через F1(1) получен код a(t+1) на Рг(2);
- a(t)1 - полученное через восстановление кода по коду a(t+1) через схему проверки СП(47).
Необходимость схемы СП(47) определяется тем, что за счет внешних и внутренних помех возможно искажение кода a(t+1).
В блоке БВ(22) реализуются следующие операции:
- если γ(t-1)=1, то a(t)1=a(t+1) -1;
- при γ(t-1)=0 значения разрядов s1…s5 кода состояния a(t)1 определяются системой булевых функций СБФ (3):

Сравнительный анализ автоматов
В прототипе (фиг. 3) главные затраты элементов связаны с реализацией схемы переходов F1(1) прототипа с количеством разрядов (n=1,5m). Для рассматриваемой ГСА при m=4 потребуется 3 группы кода pCn, но с числом разрядов n=8. Объем ПЗУ V составит V=mp2n+q=8*28=6=217=128 кб.
В предлагаемом изобретении схема F1(1) реализуется в виде специальной ПЛМ из (q) двухвходовых элементов «И», выходы которых объединяются несколькими элементами «ИЛИ» для формирования кода y1…ym.
ПЗУ в предлагаемом изобретении также используется в управляющем автомате УА(24) блока контроля БК(21), но объем ПЗУ (W) равен всего лишь 0.5 кб.
Затраты на вновь введенный второй дешифратор DC(10) предлагаемого изобретения равны затратам на шифратор CD (7) прототипа.
В прототипе в трех схемах определения наличия одной «1» в трехразрядных (а, b, с) группах реализуются булевы функции:

Всего потребуется 18 элементов.
В предлагаемом изобретении введена последовательность элементов БО(11), RS(12), «И»(13). «И»(14), «ИЛИ»(15), RS(16). Хотя БО(11) назван блоком для рассматриваемой ГСА, но это всего лишь один элемент «И-НЕ», т.е. вся эта последовательность это всего лишь 10 элементов алгебры логики.
Оценку прототипа и предлагаемого изобретения целесообразно провести для высокосложной ГСА с числом состояний N=90. УА типа ВС имеют значения m=7, q=15, mp=8, но для прототипа необходимо использовать n≥1.5m. Тогда V=n2m+q.
При N=90 для УА прототипа q=15, m=7. Для кода pCn необходимо определить 3 полные трехразрядные группы и одну неполную из двух разрядов. Тогда n=11, a V=n2n+q=11*211+15=11*226=(11/16)*230=0.68 Гб.
Поэтому по сравнению с затратами на ПЗУ прототипа почти в 0.7 гигабит затраты на все остальные вновь введенные блоки предлагаемого изобретения можно считать несущественными.
Таким образом, эффективность и оригинальность структурной организации предлагаемого изобретения бесспорны, и авторы надеются на положительное решение.
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. Согомонян Е.С. Самопроверяемые устройства и отказоустойчивые системы / Е.С. Согомонян, Е.В. Слабаков. - М.: Радио и связь, 1989. - 208 с.
2. Труды по теории синтеза и диагноза конечных автоматов и релейных устройств /под ред. В.В. Сапожникова и Вл.В. Сапожникова. СПб.: Элмор, 2009. - 894 с.
3. Сапожников, В.В. Основы технической диагностики / В.В. Сапожников, Вл.В. Сапожников. - М.: Маршрут, 2004. - 322 с.
4. Коптев А.Н. Проблемы диагностики многотактных автоматов / А.Н. Коптев, Ю.В. Коваленко // Известия самарского научного центра российской академии наук. - Самара: Самарский научный центр РАН, Сам.гос.аэрокосм.универ. им. С.П. Королева, Том. 15, №6-3, 2013. - С. 777-781.
5. Самоконтролируемый автомат управления. Патент на полезную модель №63588. - МПК(51) G11C 11/00; заявитель и патентообладатель Иркут.гос.ун-т путей сообщения. - №2006143930/22; заявл. 11.12.2006; опубл. 27.05.2007, Бюл. №15.-16 с.: 5 ил., 2007. Мухопад Ю.Ф., Мухопад А.Ю., Бадмаева Т.С.
6. Микропрограммный автомат Патент на полезную модель №82888. G06F 9/00; заявитель и патентообладатель Иркут.гос.ун-т путей сообщения. - 2008149344/22; заявл. 15.12.2008; опубл. 10.05.2009, Бюл. №13. - 2 с.: 1 ил. - Мухопад А.Ю., Мухопад Ю.Ф.
7. Управляющий автомат Патент на изобретение №2475816 Российская Федерация МПК(51) G06F 9/00 заявитель и патентообладатель Иркут.гос.ун-т путей сообщения. - №2011145137/08; заявл. 07.11.2011; опубл. 20.02.2013, Бюл. №5. - 13 с.: 5 ил. RU 2 475 816 С1, Мухопад А.Ю., Мухопад Ю.Ф.




| название | год | авторы | номер документа |
|---|---|---|---|
| Самоконтролируемый автомат | 2020 |
|
RU2775173C1 |
| Метод динамического контроля автоматов и устройство, его реализующее | 2015 |
|
RU2651214C2 |
| МИКРОПРОГРАММНЫЙ АВТОМАТ | 2013 |
|
RU2527190C1 |
| УСТРОЙСТВО КРИПТОГРАФИЧЕСКОЙ ЗАЩИТЫ ИНФОРМАЦИИ | 2011 |
|
RU2475838C1 |
| САМОКОНТРОЛИРУЕМЫЙ АВТОМАТ | 2011 |
|
RU2502121C2 |
| УПРАВЛЯЮЩИЙ АВТОМАТ | 2011 |
|
RU2475816C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ | 1991 |
|
RU2029986C1 |
| САМОПРОВЕРЯЕМЫЙ МОДУЛЯРНЫЙ ВЫЧИСЛИТЕЛЬ СИСТЕМ ЛОГИЧЕСКИХ ФУНКЦИЙ | 2009 |
|
RU2417405C2 |
| Вероятностное устройство для решения конечно-разностных уравнений | 1981 |
|
SU1149278A1 |
| Многофункциональный логический модуль | 1989 |
|
SU1661752A1 |








Настоящее изобретение относится к вычислительной технике и дискретной автоматике и может быть использовано для создания информационно-управляющих подсистем мехатроники и робототехники, летательных аппаратов, измерительных систем, систем оборонного комплекса и других средств автоматизации технологических процессов и производств. Предлагаемый управляющий автомат с контролем состояний отличается введением унитарного кодирования, суммирующего счетчика памяти состояний и блока контроля, с контрольным ПЗУ, вычитающего счетчика, комплекса регистров памяти и элементов «И», «ИЛИ», обеспечивающих обмен информации с блоками контролируемого автомата. Технический результат - уменьшение количества элементов и снижение сложности блока контроля управляющего автомата с контролем состояний. 12 ил., 8 табл.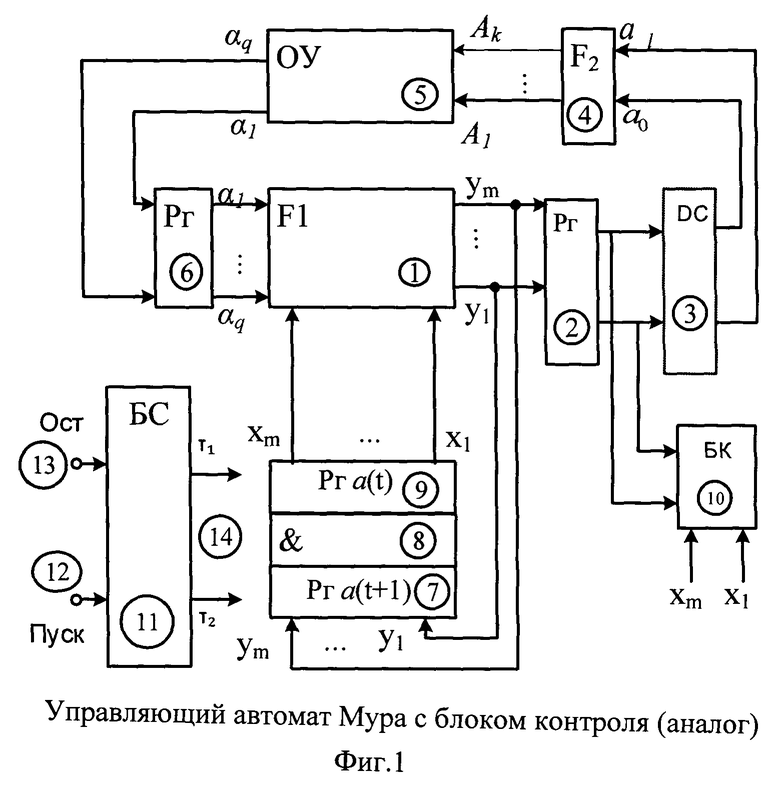
Управляющий автомат с контролем состояний, содержащий последовательную цепь блоков в виде первой комбинационной схемы переходов, первого регистра памяти состояний a(t+1), дешифратора состояний, схемы формирования исполнительных команд, объекта управления, второго регистра памяти значений логических условий, выходы которого соединены с первыми входами (α1…αq) комбинационной схемы переходов; содержащий третий регистр памяти состояний a(t+1), соединенный входами с выходами комбинационной схемы переходов, а выходы регистра соединены со входами блока элементов «И»; управляющий автомат с контролем состояний, отличающийся тем, что дополнительно введен суммирующий счетчик состояний a(t), параллельные входы которого парафазно соединены с выходами схемы элементов «И», а кодовые выходы через дополнительно введенный второй дешифратор соединены со вторыми входами схемы переходов; введена непрерывная цепочка в виде блока определения признака необходимости изменения состояния счетчика, первого триггера, единичный выход которого через первый элемент «И» соединен со счетным входом счетчика, а выходы первого триггера через вторые элементы «И» и элементы «ИЛИ» парафазно связаны со входами второго триггера, единичный выход которого связан с дополнительным входом блока синхронизации со входами «Пуск», «Останов» и выходами в виде двух сигналов синхронизации; содержащий также блок контроля, первые входы которого связаны с выходами первого регистра памяти, а вторые входы связаны с кодовыми выходами счетчика; содержащий также блок восстановления состояния a(t) автомата, кодовые выходы блока связаны с выходами первого регистра памяти, а одноразрядный дополнительный вход блока связан с единичным выходом второго триггера; выходы блока восстановления связаны с третьими кодовыми входами блока контроля.
| Способ точной расточки коренных подшипников автомобильных, тракторных и т.п. двигателей | 1942 |
|
SU63588A1 |
| САМОКОНТРОЛИРУЕМЫЙ АВТОМАТ | 2011 |
|
RU2502121C2 |
| US 6195025 B1, 27.02.2001 | |||
| US 2006187095 A1, 24.08.2006. | |||

