Изобретение относится к области использования беспилотных летательных аппаратов для целей народного хозяйства, в том числе грузоперевозок, пожаротушения и мониторинга лесов, территорий и может быть использовано для оптимизации перемещения таких аппаратов и предотвращения их столкновения с другими объектами, в том числе с пилотируемыми воздушными судами.
Патенты RU 2309543 C2 (заявка: 2005130586/09, 03.10.2005) и RU 2 518 054 C1 (заявка: 2012157410/07, 25.12.2012) содержат указание на использование сигналов информационного обмена с воздушным объектом в каналах «воздух-земля» в MB-диапазоне в линиях передачи данных «воздух-земля» VDL-2 и VDL-4, однако в данных источниках данная технология критикуется как имеющая ограниченную, недостаточную скорость передачи.
Известно решение по патенту RU 2687008 C2 (заявка: 2017137135, 23.10.2017), согласно которому плановую траекторию полета БПЛА вырабатывают в виде конхоидального преобразования лемнискаты на основании расстояния удаленности, при этом вычислительное устройство БПЛА содержит интерфейс связи для приема значения расстояния удаленности до цели, и такой интерфейс 132 связи может быть беспроводным интерфейсом и/или одним или более проводными интерфейсами, при этом беспроводные интерфейсы могут обеспечивать связь по одному или более протоколам беспроводной связи, таким как протоколы Very High Frequency (VHF), Data link (VDL), VDL Mode 2, адресно-отчетная система авиационной связи (Aircraft Communications Addressing and Reporting System, ACARS), цифровая связь УКВ радио и спутниковая связь (SATCOM), Bluetooth, Wi-Fi (например, протокол 802.11 стандарта Института инженеров по электротехнике и электронным инженерам (IEEE)), стандарт Long-Term Evolution (LTE), сотовая связь, технология ближней бесконтактной связи (NFC) и/или другие протоколы беспроводной связи. Такие проводные интерфейсы могут включать в себя шину данных летательного аппарата, например, интерфейсы по стандартам 429, 629 или 664 ARTNC (Aeronautical Radio, Incorporated), интерфейс Ethernet, интерфейс универсальной последовательной шины (Universal Serial Bus, USB) или аналогичный интерфейс для связи через провод, витую пару проводов, коаксиальный кабель, оптическую линию, волоконно-оптическую линию или другое физическое соединение с проводной сетью. Таким образом, интерфейс 132 связи может быть выполнен с возможностью приема входных данных от одного или более устройств, а также может быть выполнен с возможностью отправки выходных данных на другие устройства.
Недостатком этого патента является то, что указанные интерфейсы связи перечислены без какой-либо конкретики, по сути, автор технического решения просто перечислил все известные интерфейсы связи, включая проводные (что для летательных аппаратов явно требует специальных пояснений).
Известен патент RU 2676387 C1 (заявка: 2018102988, 25.01.2018), согласно которому предлагается компоновка малогабаритной бортовой аппаратуры формирования и передачи телеметрической информации БПЛА, содержащей, помимо прочего, модуль передачи телеметрической информации, интерфейсный модуль, блок аппаратного и алгоритмического кодирования, при этом интерфейсный модуль содержит модуль обработки сигналов, содержащий аналого-цифровые преобразователи, средство преобразования кадра, оперативное запоминающее устройство, преобразователи интерфейса, а модуль передачи телеметрической информации содержит передатчик, постоянное запоминающее устройство, интегрированную антенну. Обеспечивается повышение надежности регистрации контролируемых по радиоканалу параметров БПЛА, защита информации, уменьшение габаритов аппаратуры. В описании к патенту уточняется, что правильный выбор частоты сигнала позволяет применить оптимальный по компактности подбор датчиков, модулей и антенн.
Недостатком указанного патента является то, что, описав недостатки существующих решений и известных частот, авторы патента не раскрыли, какой именно диапазон является оптимальным для уменьшения оборудования и достижения технического эффекта при применении узкого канала связи в условиях управления БПЛА, требующего обработки и верификации большого количества информации, не входящего в узкий канал связи, без специфических технических решений.
Подробная, детализированная информация о способе и системе автоматической фильтрации сетевых сообщений в авиационной сети летательного аппарата на основании текущего системного контекста содержится в патенте RU 2 722 366 C2 (заявка: 2017102041, 23.01.2017), в описании которого, помимо прочего, указано, что бортовые сетевые системы летательного аппарата могут отправлять, посредством сети информацию на еще один самолет и/или системы беспилотного летательного аппарата и/или принимать от них информацию, при этом такая информация может содержать данные автоматического зависимого наблюдения-вещания (ADS-B), основанные на линии передачи расширенного сквиттера с частотой 1090 МГц, или другие маячковые сигналы для идентификации и отслеживания летательного аппарата. Недостатком данного технического решения является то, что оно имеет особую направленность – не на улучшение обмена информации, а, наоборот, на сокращение, оптимизацию, фильтрацию такого обмена, соответственно решение об обмене сигналами представлено в общем виде – без указания какие иные сигналы должны дополнить использование частоты 1090 МГц для наилучшего эффекта. Далее будут приведены отличия предлагаемого решения, в котором прием и передача сигналов управления БПЛА производится только через канал VDL-4 частота 136-137 МГц.
Ближайшим аналогом заявитель считает источник RU 2790349 C1 (заявка: 2022120524, 26.07.2022), согласно которому антенное устройство 118 БПЛА (летно-подъёмного аппарата) представлено набором из четырех антенн, обеспечивающих прием запросных кодов с земли на частоте 1030 МГц, ответных кодов с борта воздушного судна на частоте 1090 МГц, запросных и ответных кодов морских судов на частоте 163 МГц, при этом четвертой является антенна приема сигналов ГНСС ГЛОНАСС (GPS), предназначенных для определения собственного местоположения.
Предложенное в ближайшем аналоге решение направлено на поиск оптимального выбора нескольких частот с учётом того, что устройство должно принимать и отправлять сигналы на нескольких разных точно определённых частотах для оповещения внешних воздушных судов/дронобортов о местонахождении всех участников воздушного движения.
Недостатком данного решения является его узкая отраслевая направленность на использование в море (где источниками сигналов являются морские суда, имеющие свою специфику), а не для сухопутных участков (где наземная аппаратура имеет свои особенности, обусловленные возможностью проводной связи между такой аппаратурой), при этом в указанном патенте отсутствует акцент на автоматизацию работы носителей таких устройств связи без участия человека.
Задачей изобретения является создание автоматизированной системы взаимного оповещения и обработки сообщений бортовыми ресурсами БПЛА между используемым беспилотным летательным аппаратом (БПЛА) с одной стороны, а также другими БПЛА и/или пилотируемыми воздушными судами с другой стороны, в условиях, когда количество оборудования, устанавливаемого на БПЛА является конечным и ограниченным и требует максимальной компактности и легкости.
Основным техническим результатом предложенного изобретения является безопасность, как для БПЛА, так и находящихся в зоне досягаемости иных объектов (БПЛА, иных воздушных судов, беспилотных летательных систем). Дополнительным техническим результатом является применение ресурсов одноплатного модуля математической обработки входящей информации и формирование исходящей информации.
Сущность изобретения
Предлагается беспилотный летательный аппарат вертолётного типа, имеющий корпус, состоящий из рамы с кожухом и хвостовой балки, двигатель, систему электрического снабжения, аккумулятор, модуль на основе одноплатного компьютера (микро-ЭВМ), управляющий радиооборудованием, радиооборудование, включающее радиоудлинитель 2,4 ГГц, модуль 3G/4G связи и спутниковый приёмник (ГНСС приемник), антенно-фидерный комплект, включающий:
- блок приёмо-передатчика,
- антенну приёма VDL4 сигнала (антенну системы АЗН-В VDL4), которая располагается на хвостовой балке аппарата,
- антенну приёма 1090ES сигнала (антенна системы АЗН-В 1090ES), которая располагается в области передней (носовой) части аппарата на металлизированной подстилающей поверхности,
- спутниковый приёмник, который располагается на хвостовой балке,
- фидеры спутникового приёмника, антенн АЗН-В VDL4 и АЗН-В 1090ES.
Оптимальной компоновкой изделия является такая, при которой:
- блок приемопередатчика располагается в задней части фюзеляжа,
- антенна приёма VDL4 сигнала имеет направление вниз и располагается на хвостовой балке в центральной области аппарата,
- антенна приёма 1090ES сигнала имеет направление вниз и располагается в области передней (носовой) части аппарата,
- спутниковый приёмник располагается на хвостовой балке сверху,
- фидеры спутникового приёмника и антенны АЗН-В VDL4 проходят по верхней части хвостовой балки и заходят под кожух, а фидер от антенны АЗН-В 1090ES проходит в пространстве под кожухом.
Кожух БПЛА должен быть лёгким и не экранировать прохождение радиосигналов, таким образом оптимальным является его исполнение из полимеров (пластмасс) или композитов (углепластика, углеволокна).
Предлагаемое решение может быть выполнено посредством двигателей внутреннего сгорания, однако оптимальным будет использование электрического двигателя, что может быть реализовано при использовании одного или нескольких аккумуляторов. Аккумуляторы могут располагаться по бокам фюзеляжа.
Перечень чертежей
Изобретение поясняется следующими изобразительными материалами:
Фигура 1 – общий схематический вид БПЛА,
Фигура 2 – схема подключения радиооборудования.
Раскрытие изобретения
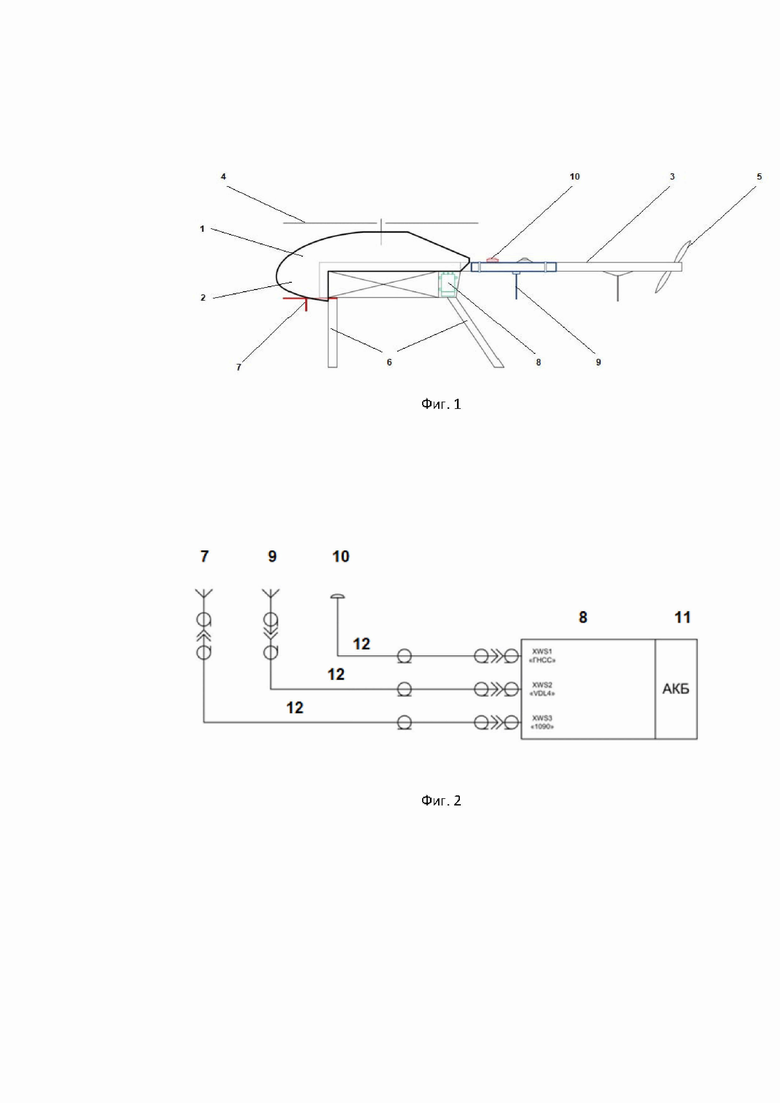
На фигуре 1 приведено схематическое изображение БПЛА, общий корпус которого состоит из рамы с кожухом и с хвостовой балкой.
БПЛА является аппаратом вертолётного типа, то есть имеет продолговатую конфигурацию из корпуса (фюзеляжа) 1 с передней частью («кабиной») 2 и хвоста 3, имеет на передней части 2 несущую винтовую систему 4 (винт или узел из нескольких несущих винтов), а на хвосте 3 – хвостовое оперение (не показано) и рулевой винт 5.
В частном случае исполнения БПЛА имеет электрический двигатель (не показан), систему электрического снабжения (не показана), аккумулятор или аккумуляторы (не показаны), радиооборудование, включающее радиоудлинитель 2,4 ГГц (не показан), модуль 3G/4G связи (не показан) и антенно-фидерный комплект, включающий в себя спутниковый приёмник (ГНСС приемник, например, GPS или ГЛОНАСС).
Исполнение (компоновка) антенно-фидерного комплекта имеет ключевое значение для предложенного технического решения. Общая схема его исполнения представлена на фигуре 2.
Однако ключевым является размещение антенн и спутникового приёмника в правильной последовательности и с корректной пространственной ориентировкой.
Несмотря на то, что БПЛА при движении может смещаться и переворачиваться во всех осях и плоскостях, в основном рабочем положении он имеет переднюю часть (нос кожуха) 2, серединную часть (примерно равноудалённую от двух крайних точек), хвостовую часть. Наверху изделия находится несущий винт (винтовая система), снизу – опоры 6 (ножки, полозья, шасси).
Изделие имеет антенну приёма 1090ES сигнала (позиция 7), которая располагается в области передней (носовой) части 2 аппарата на металлизированной подстилающей поверхности (не показана). Такая антенна может находиться в самом носу БПЛА, чуть ниже носа, помещаться как внутри кожуха, так и снаружи. Предпочтительно, чтобы она ориентировалась вниз, например, относительно усреднённой поперечной плоскости изделия – под углом в 60°-90°.
Блок приёмо-передатчика (позиция 8), располагается в кожухе, например, в срединной части БПЛА (в задней части фюзеляжа), и соединён (проводами и фидерами 12) с перечисленными радиодеталями изделия (антеннами, блоками, передатчиками).
Антенна приёма VDL4 (позиция 9) располагается на хвостовой балке аппарата ближе к срединной части изделия. Она обязательно должна ориентироваться вниз, например, относительно усреднённой поперечной плоскости изделия – под углом в 80°-90°. Предпочтительный диапазон приема и передачи сигналов антенной VDL-4 это частота 136-137 МГц. При выборе такой частоты прием и передача сигналов управления БПЛА производится только через канал VDL-4.
Спутниковый приёмник (позиция 10) располагается на хвостовой балке сверху, примерно в той же зоне, что и антенна приёма VDL (позиция 9), более того, обе названные детали могут иметь один общий экран (одну общую подстилающую поверхность). Обыкновенно подобные спутниковые приёмники имеют форму, приближенную к сплющенному цилиндру («шайбе») или полусфере. Приёмник должен быть размещён в верхней части, поскольку в основном рабочем положении он должен быть направлен к ближайшим спутникам.
Спутниковый приёмник (10), антенны АЗН-В VDL4 (9) и АЗН-В 1090ES (7) соединены с блоком приёмо-передатчика 8 фидерами (проводами) 12 (символически показаны на фигуре 2). Все фидеры в месте соединения с блоком 2 заходят под кожух, при этом далее фидеры спутникового приёмника и антенны АЗН-В VDL4 проходят по верхней части хвостовой балки, а фидер от антенны АЗН-В 1090ES проходит в пространстве под кожухом.
Состав антенно-фидерного комплекта радиостанции «Пульсар-МР» приведен в таблице 2.
Таблица 1
Предложенная компоновка антенно-фидерного комплекса требует обязательного использования подстилающих (металлизированных) поверхностей для каждой из антенн.
Размер подстилающей поверхности должен быть достаточным, его уменьшение приводит к ухудшению радиосвязи. При выборе размера и формы подстилающей поверхности следует руководствоваться принципом разумного баланса с приоритетом на качество радиосвязи.
Блок приемопередатчика 8 может иметь свой собственный дополнительный аккумулятор 11 (схематически показан на фигуре 2). Блок 8 располагается в срединной части изделия, несколько ближе к носу. Если фюзеляж (корпус) представляет собой только кабину, а хвост не покрыт фюзеляжем, то такой блок 8 располагается в задней части фюзеляжа (например, в свободном месте за установленным аккумулятором БПЛА с левой стороны по ходу движения). Если корпус полностью заедино закрывает и кабинную, и хвостовую часть, то блок 8 также находится в срединной части изделия. В любом исполнении существенным является, чтобы блок для безопасности от внешних повреждений, переохлаждения, влаги находился под фюзеляжем.
Антенна системы АЗН-В 1090ES (поз. 7) располагается спереди, на металлизированной пластине подстилающей поверхности. Направление антенны – вниз. Пластину подстилающей поверхности рекомендуется изготовить из алюминиевой композитной сэндвич-панели. Пластина подстилающей поверхности антенны 7 изготавливается по конуру кожуха. Установка пластины и антенны должна обеспечивать отсутствие затенения антенны от кожуха в боковой проекции и с учетом нахождения антенны в середине подстилающей поверхности. При этом желательно обеспечить минимальную площадь подстилающей поверхности не менее 160 см2.
Антенна системы АЗН-В VDL4 (поз. 9) располагается на хвосте (хвостовой балке) сразу за кожухом фюзеляжа, с целью обеспечения максимально возможной развязки в пространстве от штатной связной антенны. Направление антенны – вниз. Подстилающая поверхность уменьшенного размера выполняется из металлической фольги. В случае применения ретранслятора связи между БПЛА и наземным модулем подразумевается поднимать антенну ретранслятора над поверхностью земли и при этом обе антенны и ретранслятора и на хвостовой балке БПЛА вертикальны а в случае применения ретранслятора спутникового исполнения низкоорбитального применения то антенны ретранслятора и БПЛА могут быть горизонтального исполнения
Приёмник ГНСС (поз. 10) располагается на хвостовой балке сверху в удобном месте в районе установки подстилающей поверхности антенны АЗН-В VDL4 (поз. 9). Для удобства размещения приёмника ГНСС (10) он может иметь общую подстилающую поверхность с антенной АЗН-В VDL4 (9).
Питание блока приемопередатчика 8 осуществляется предпочтительно от своего штатного аккумулятора, который устанавливается непосредственно перед полетом.
Предложенная компоновка выполнения БПЛА (антенно-фидерного комплекса БПЛА) реализует применение двухдиапазонного приемо-передатчика длины волн 1090 и VDL 04. Длина волны 1090 используется для оповещения по стандарту ИКАО внешних воздушных судов и дронобортов (БПЛА, БАС) о местонахождении всех участников воздушного движения. Таким образом и дроноборты «видят» (обнаруживают, опознают) друг друга, а также и воздушные суда. При этом соблюдается режим автоматизации расхождения встречных курсов по требованиям ИКАО. Также наличие второго диапазона связи длина волны 1090 позволяет применять экстренный канал передачи коротких фотоматериалов для экстренных служб касающихся пожаров и других чрезвычайных ситуаций
Через другой канал связи (канал VDL4) дроноборты обмениваются друг с другом пакетами команд, перераспределяя работу над одной задачей или над несколькими задачами. Внутри каждого блока, размещенного на каждом дроноборте, и внутри наземных станций присутствуют одноплатные компьютеры (микро-ЭВМ), выполняющие функции математической обработки принятых внешних данных в видимом (от камер принимающих излучение объектов) и невидимом спектре длин волн, анализа этих данных (верификации и валидации) и принятия решения об изменении маршрута полета в случае обнаружении события, отраженного в программном обеспечении как нежелательное («тревога»). Обыкновенно, такие компьютеры имеют по меньшей мере четыре режима безопасности: «стоп», «назад на базу», «возвращайся на маршрут», «приземление», режимы реализуются по сигналу, подаваемому извне (с наземной станции или иного БПЛА). Так как основные процессинговые мощности и процессы происходят внутри этих модулей и такие процессы затрачивают мало процессинговых мощностей, они распределены на более простые процессы, поэтому требования к ресурсности одноплатных компьютеров небольшие; таким образом информация о результатах верификации и валидации имеет небольшой объём и может передаваться в пакетах данных через канал связи VDEL 4 как на землю (на наземный комплекс автоматизации), так и другим дронобортам, а также и воздушным судам; таким образом реализуется высокоскоростное общение между всеми модулями (потребителями), что объединяет их в единый комплекс. Так как эти сообщения очень короткие (малоёмкие), то они могут являться управляющими командами в передаче пакетов передачи данных воздушным судам всех типов в длинном диапазоне волн, дальность затухания которых составляет сотни километров.
Аппарат по предложенному изобретению может иметь горизонт управления и связи дронов друг с другом и с наземными контейнерами, составляющий до пятиста километров.
Подобные БПЛА могут иметь самое широкое гражданское применение: использоваться для перевозки грузов, для тушения пожаров, наблюдения за территорией, оборудоваться датчиками погодных станций для сбора метеоданных.
Учитывая стандартные габариты описанного оборудования, следует отметить, что предложенное решение предпочтительно должно выполняться на БПЛА сравнительно большого размера и веса, на так называемых беспилотных авиационных системах (БАС), то есть «тяжёлых» БПЛА, имеющих высокую грузоподъёмность. Это особенно востребовано в сфере пожаротушения, поскольку в качестве пожарных БПЛА используются крупные грузоподъемные машины, которые способны нести большое количество огнетушащих бомб (зарядов), а значит производить тушение пожара с большей эффективностью.
Предложенное изобретение содержит техническое решение для достижения надёжного, эффективного обеспечения безопасности использования беспилотных летательных аппаратов, предлагает легко исполнимое и минимально достаточное решение большинства задач по получению и обмену информацией между БПЛА и другими летательными аппаратами и/или наземными станциями, по предотвращению столкновений, по оптимизации маршрутов. Управление обмена информацией реализуется через микро-ЭВМ. Компоновка (расположение) антенн и передатчиков исполнена таким образом, чтобы минимально влиять на аэродинамические свойства БПЛА вертолётного типа, а также на его балансировку. При этом реализована экономная и эффективная система передачи сигналов и информации через ретранслятор соседним наземным станциям и БПЛА, также низкоорбитальным спутниковым группировкам.
| название | год | авторы | номер документа |
|---|---|---|---|
| Комплексированное приемопередающее устройство информационного обмена с летательными аппаратами | 2023 |
|
RU2805378C1 |
| Беспилотный летательный аппарат вертолётного типа | 2022 |
|
RU2799689C1 |
| Беспилотный летательный аппарат вертолетного типа | 2022 |
|
RU2792460C1 |
| Малогабаритная радиостанция передачи команд управления беспилотным летательным аппаратом | 2021 |
|
RU2767605C1 |
| УНИФИЦИРОВАННЫЙ БОРТОВОЙ МОДУЛЬ АВИАЦИОННОГО НАБЛЮДЕНИЯ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2021 |
|
RU2794287C1 |
| СПОСОБ МОНИТОРИНГА СОСТОЯНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ ПРИ ДВИЖЕНИИ ПОЕЗДА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2829561C2 |
| Многоцелевой комбинированный беспилотный летательный аппарат | 2024 |
|
RU2831435C1 |
| Многоцелевой беспилотный летательный аппарат | 2021 |
|
RU2763896C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ПРИ ДВИЖЕНИИ ПОЕЗДА МЕТРОПОЛИТЕНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ С ПРИМЕНЕНИЕМ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2022 |
|
RU2829794C2 |
| БЛОК ДЕТЕКТИРОВАНИЯ ГАММА-ИЗЛУЧЕНИЯ В СОСТАВЕ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ЛЕГКОГО КЛАССА | 2013 |
|
RU2565335C2 |
Беспилотный летательный аппарат вертолётного типа содержит корпус в виде обтекателя, состоящий из рамы с кожухом и хвостовой части, двигатель, систему электрического снабжения, аккумулятор, модуль на основе одноплатного компьютера, управляющий радиооборудованием, радиооборудование, включающее радиоудлинитель 2,4 ГГц, модуль 3G/4G связи, а также антенно-фидерный комплект, включающий блок приемопередатчика, антенну приёма VDL4 сигнала, располагающуюся на хвостовой балке аппарата, антенну приёма 1090ES сигнала, располагающуюся в области передней части аппарата, спутниковый приёмник, который располагается на хвостовой балке, фидеры спутникового приёмника, антенны АЗН-В VDL4 и АЗН-В 1090ES. Обеспечивается повышение безопасности полета. 5 з.п. ф-лы, 1 табл., 2 ил. 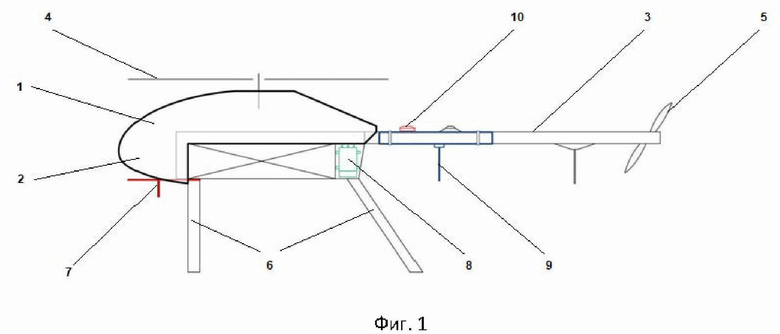
1. Беспилотный летательный аппарат вертолётного типа, имеющий корпус в виде обтекателя, состоящий из рамы с кожухом и хвостовой части, а также двигатель, систему электрического снабжения, аккумулятор, модуль на основе одноплатного компьютера, управляющий радиооборудованием, радиооборудование, включающее радиоудлинитель 2,4 ГГц, модуль 3G/4G связи, а также антенно-фидерный комплект, включающий:
- блок приёмопередатчика,
- антенну приёма VDL4 сигнала, располагающуюся на хвостовой балке аппарата,
- антенну приёма 1090ES сигнала, располагающуюся в области передней части аппарата,
- спутниковый приёмник, который располагается на хвостовой балке,
- фидеры спутникового приёмника, антенн АЗН-В VDL4 и АЗН-В 1090ES.
2. Аппарат по п. 1, отличающийся тем, что:
- блок приёмопередатчика располагается в задней части фюзеляжа,
- антенна приёма VDL4 сигнала и антенна приёма 1090ES сигнала имеют направление вниз,
- спутниковый приёмник располагается на хвостовой балке сверху,
- фидеры спутникового приёмника и антенны АЗН-В VDL4 проходят по верхней части хвостовой балки и заходят под кожух, а фидер от антенны АЗН-В 1090ES проходит в пространстве под кожухом.
3. Аппарат по п. 1 или 2, отличающийся тем, что его кожух выполнен из полимера или композитного материала.
4. Аппарат по п. 3, отличающийся тем, что его кожух выполнен из углеволокна.
5. Аппарат по п. 1 или 2, отличающийся тем, что двигатель является электрическим.
6. Аппарат по п. 5, отличающийся тем, что оборудован двумя аккумуляторами снабжения питанием электрического двигателя, расположенными по бокам фюзеляжа, а также оборудован дополнительным аккумулятором снабжения блока приёмопередатчика.
| US 20220214704 A1, 07.07.2022 | |||
| Комплексированное приемопередающее устройство информационного обмена с летательными аппаратами | 2023 |
|
RU2805378C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2013 |
|
RU2544007C2 |
| СПОСОБ ПРОИЗВОДСТВА ВОДКИ | 0 |
|
SU208626A1 |
| СПОСОБ И КОМПЛЕКСНАЯ АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ АВИАЦИОННЫМИ СИСТЕМАМИ НАБЛЮДЕНИЯ И НАВИГАЦИИ | 2020 |
|
RU2799550C1 |
| CN 106527483 A, 22.03.2017. | |||

