Изобретение относится к области испытательной техники и может быть использовано для обучения, настройки и испытаний адаптивных и интеллектуальных систем автоматического управления (САУ) беспилотных воздушных судов (БВС), в том числе - в составе беспилотной авиационной системы (БАС), с учетом воздействия внешних ветровых возмущений и атмосферных явлений (погодных условий). Наибольший интерес представляет использование предлагаемого способа при проведении полунатурных испытаний БВС вертикального взлета и посадки (БВС ВВП).
В настоящее время большой интерес представляет использование САУ, реализующих возможности адаптации и обучения и основанных на внедрении так называемых элементов искусственного интеллекта (ИИ), включая искусственные нейронные сети (ИНС), нечеткую логику (НЛ) и экспертные системы (ЭС). Применение таких САУ должно повысить эксплуатационные свойства БВС в условиях воздействия внешних возмущений, в частности, ветра и осадков. Для реализации технологии обучения и настройки таких САУ, а также для последующей оценки результатов обучения, необходимо иметь возможность повторного воспроизведения заданных условий полета - траектории движения БВС и атмосферных воздействий. Потребное число воспроизведений зависит от выбранного алгоритма обучения или настройки САУ. При этом окончательные испытания следует проводить на натурных объектах (БВС) с включением в контур управления штатных элементов бортовых САУ.
Из уровня техники известен способ проведения полунатурных испытаний САУ БВС ВВП [1] (Патент №2771692) путем включения в контур управления БВС реальных средств измерения углового положения и линейных ускорений, бортовой цифровой вычислительной машины (БЦВМ), реализующей тестируемый алгоритм автоматического управления БВС, а также приводов (исполнительных механизмов) системы управления, при этом испытываемый экземпляр БВС закрепляется на роботизированном манипуляторе, обеспечивающем линейные и угловые перемещения БВС вместе с реальными элементами САУ. Для формирования линейных и угловых перемещений БВС, имитирующих реальную динамику полета БВС на режимах вертикального взлета, посадки и висения с ограниченными линейными перемещениями, используется шестистепенной роботизированный манипулятор, обеспечивающий изменение углов и угловых скоростей БВС в эксплуатационном диапазоне этих параметров. При этом функционирование бортовой САУ происходит на основании информации о фактических угловых и линейных перемещениях БВС, получаемой с помощью штатной системы измерения, а команды, формируемые САУ, и данные о реализации этих команд приводами передаются на моделирующий стенд, обеспечивающий расчет динамики и кинематики перемещений БВС и формирующий команды управления перемещением узла крепления роботизированного манипулятора к испытываемому БВС.
Недостатком этого способа является необходимость использования для имитации перемещения БВС модели динамики полета БВС, которая предполагается заранее известной, что накладывает ограничения на возможность проведения исследований и негативно влияет на точность полунатурных испытаний в сравнении с реальным полетом.
Из уровня техники известен способ идентификации и валидации математической модели БВС ВВП с использованием шестистепенного роботизированного манипулятора [2] (Патент №2774479), при котором перемещения БВС ВВП выполняются с помощью шестистепенного роботизированного манипулятора, а сам БВС закрепляется к манипулятору с использованием динамометрического узла крепления.
При этом информация о силах и моментах, возникающих в динамометрическом узле крепления при функционирующих реальных САУ, средствах создания подъемной силы, приводах и органах управления БВС, используется в алгоритме настройки и последующей валидации модели динамики полета БВС и инверсной модели движения манипулятора. Указанные модели реализуются в составе моделирующего стенда для формирования команды управления перемещением динамометрического узла крепления, испытываемого БВС к роботизированному манипулятору на основании моделирования динамики и кинематики перемещений БВС.
При этом используется информация о функционировании бортовой САУ и штатной системы измерения фактических угловых и линейных перемещений БВС, а также о командах, формируемых САУ, и соответствующих перемещениях приводов, что позволяет уточнить исходную модель динамики полета БВС.
Недостатком данного способа является то, что в предложенной реализации рассматривается только динамика полета БВС на режимах близких к висению, и отсутствует возможность экспериментальных исследований влияния внешних атмосферных условий.
Из материалов зарубежной печати известен способ проведения испытаний свободнолетающих БВС в условиях имитации воздушно-ветровых возмущений с помощью массива вентиляторов, создающих воздушный поток переменной интенсивности (Патент PATENT WO 2020163432 A1) [3] (System and Method for Wind Tunnel Testing a UAS in a Fully Autonomous Operating Mode (2020)).
Недостатком данного способа является то, что в предложенной реализации отсутствует возможность воспроизведения одних и тех же сочетаний воздушно-ветровых условий и траектории БВС для обучения и настройки алгоритмов САУ и для сравнения точности управления БВС при различных вариантах структуры и настройки САУ с помощью экспериментальных исследований влияния внешних воздушно-ветровых воздействий. Кроме того, в предложенной реализации сложно обеспечить безопасность проведения экспериментальных исследований, особенно при исследовании ситуаций, связанных с отказами систем БВС.
Задачей Изобретения является устранение указанных недостатков в описанных выше способах испытаний БВС.
Технический результат заключается в повышении информативности результатов испытаний за счет учета влияния внешних условий на динамику полета БВС, в создании возможности обучения САУ с элементами ИИ, таких как ИНС, НЛ и ЭС за счет многократного воспроизведения заданного сочетания условий полета, а также обеспечение безопасности проведения испытаний БВС при имитации сложных условий полета и отказов систем БВС.
Задача и технический результат достигаются следующими этапами способа.
Способ полунатурных испытаний БВС, содержащих адаптивные и интеллектуальные САУ, с использованием роботизированной системы подвижности и системы имитации атмосферных условий, характеризуется тем, что с помощью роботизированной системы подвижности, состоящей из роботизированного манипулятора, обеспечивающего линейные и угловые перемещения БВС, и динамометрического узла подвеса, посредством которого закрепляют БВС, обеспечивают многократное воспроизведение заданного управляемого пространственного движения БВС с моделируемыми в реальном масштабе или с реально функционирующими бортовыми системами, приводами и органами управления, а также средствами создания подъемной и пропульсивной силы. С помощью системы имитации атмосферных условий создают воздушно-ветровую обстановку с переменной интенсивностью, изменяемой по заданному закону синхронно с перемещением БВС по моделируемой траектории. Регистрируют параметры заданного управляемого пространственного движения БВС и воздушно-ветровых условий, фактические значения параметров движения и ориентации БВС, соответствующие управляющие команды, формируемые САУ, и их реализацию органами управления, а также результаты измерения компонентов сил и моментов в узле подвеса. На основании многократно зарегистрированной информации об условиях полета, значениях параметров движения БВС и управляющих воздействий, а также компонентов сил и моментов в узле подвеса производят обучение и настройку адаптивных и интеллектуальных САУ, а также последующую оценку результатов обучения.
Система имитации атмосферных условий обеспечивает воздушно-ветровую обстановку посредством неподвижного массива вентиляторов с изменяемыми по времени и по сечению потока характеристиками интенсивности ветрового воздействия, а также подвижного массива вентиляторов, позволяющего изменять дополнительно направление ветрового воздействия посредством изменения положения и ориентации массива вентиляторов с помощью роботизированного манипулятора, управляемого синхронно с остальными компонентами испытательного стенда.
Система имитации атмосферных условий дополнительно обеспечивает имитацию атмосферных осадков посредством комплекта форсунок, расположенных над зоной перемещения БВС, при этом интенсивность подачи воды через форсунки изменяется в соответствии с заданными атмосферными условиями синхронно с перемещением БВС по траектории.
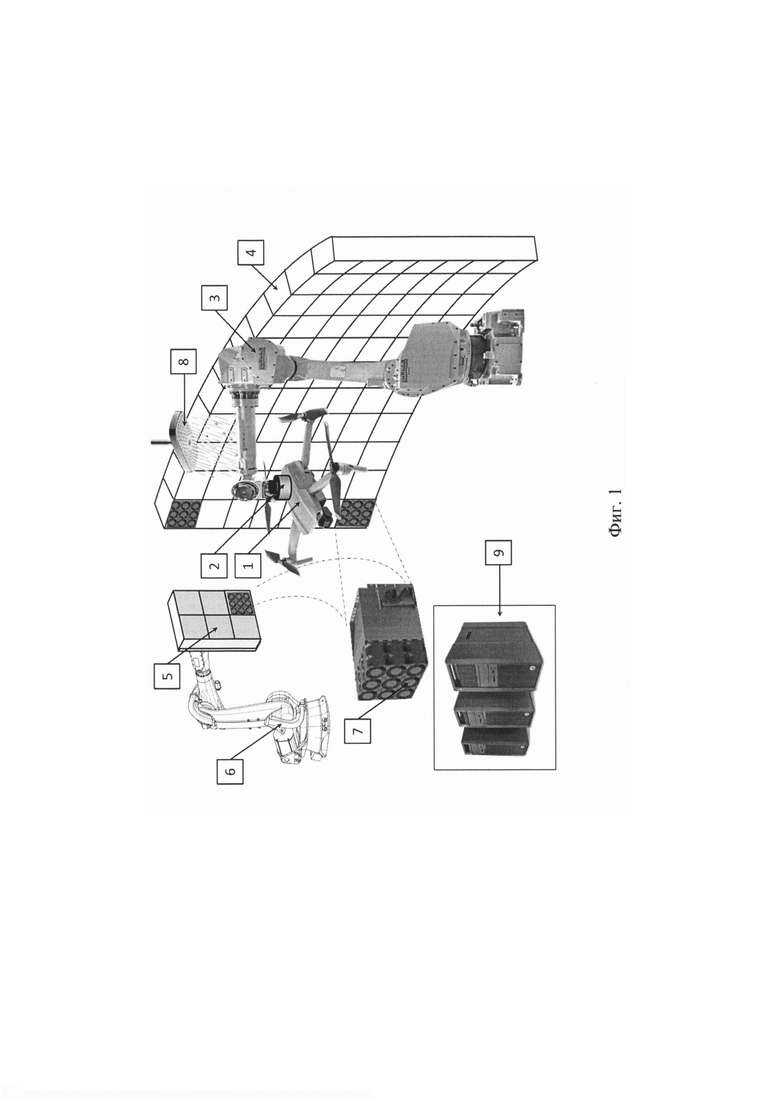
На фиг. 1 представлен стенд полунатурных испытаний с роботизированной системой подвижности и системой имитации атмосферных условий для обучения и настройки адаптивных и интеллектуальных систем автоматического управления (САУ) беспилотных воздушных судов (БВС).
Позициями на фиг. 1 обозначены:
1. Испытываемый экземпляр БВС;
2. Динамометрический узел подвеса;
3. Роботизированный манипулятор системы подвижности БВС;
4. Неподвижный массив блоков вентиляторов ("Аэростена");
5. Подвижный массив блоков вентиляторов;
6. Роботизированный манипулятор перемещения и ориентации подвижного массива блоков вентиляторов;
7. Блок вентиляторов;
8. Имитатор атмосферных осадков;
9. Программно-аппаратный модуль, обеспечивающий моделирование динамики движения БВС и управление компонентами испытательного стенда.
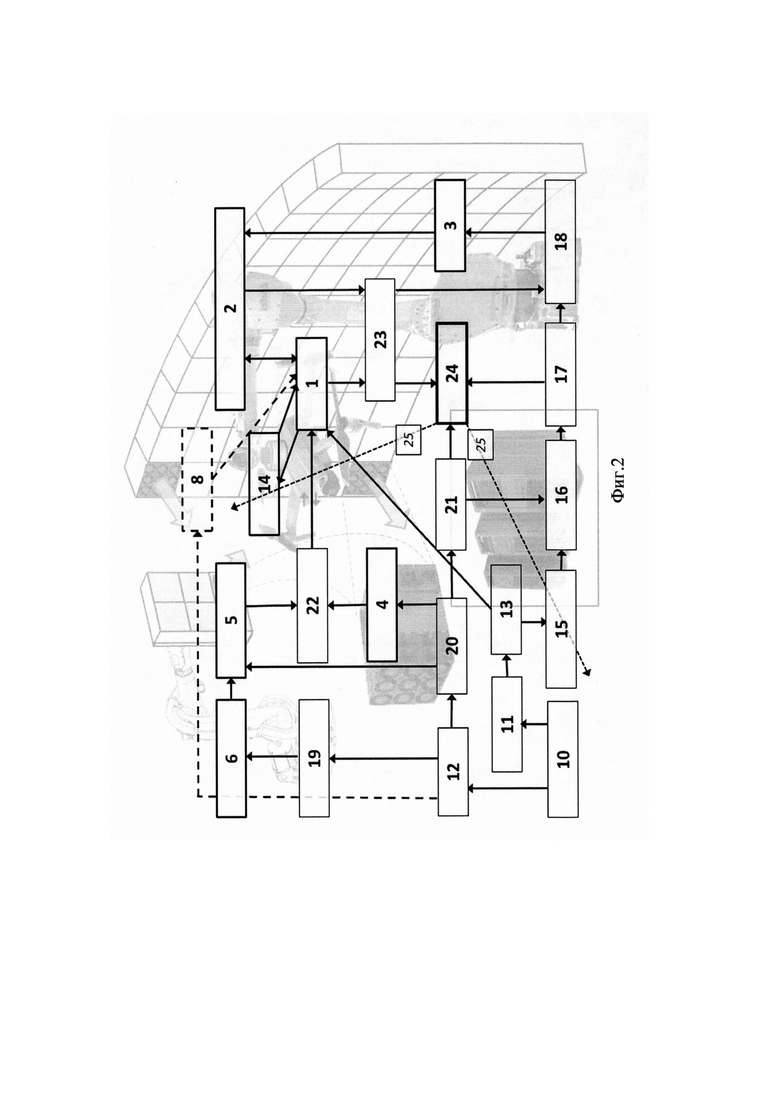
На фиг. 2 представлена блок-схема функционирования испытательного стенда в процессе проведения испытаний.
Позициями на фиг. 2 обозначены:
10. Заданный сценарий испытательного полета (траектория и атмосферные воздействия);
11. Блок управления траекторией полета;
12. Блок управления атмосферной обстановкой;
13. Имитатор наземного пункта управления;
14. Бортовая САУ;
15. Блок моделирования САУ БВС;
16. Блок моделирования динамики полета исследуемого БВС;
17. Блок расчета траектории перемещения и угловой ориентации узла подвеса к БВС;
18. Система управления манипулятором системы подвижности БВС;
19. Блок управления перемещением подвижного массива блоков вентиляторов;
20. Программно-аппаратный модуль управления блоками вентиляторов;
21. Блок расчета модели влияния ветра;
22. Поток воздуха от блоков вентиляторов;
23. Блок регистрации информации, используемой для настройки и обучения САУ;
24. Блок настройки и обучения;
25. Канал настройки алгоритмов САУ и модели САУ.
Предлагаемый способ осуществляется следующим образом.
Испытываемый экземпляр БВС (1) с помощью динамометрического узла подвеса (2) закрепляется на роботизированном манипуляторе (3), обеспечивающем линейные и угловые перемещения БВС.
Далее выполняют следующую последовательность действий.
Заданный сценарий (10), включающий в себя траекторию и режимы полета, скорость и направление ветра, а также возможный характер атмосферных осадков на каждом участке траектории, реализуют с помощью синхронизированных между собой блоков управления траекторией (11) и управления атмосферной обстановкой (12).
Заданную траекторию полета передают с имитатора наземного пункта управления (13), включающего в себя канал радиосвязи или имитатор канала радиосвязи, на БВС (1) в соответствии с реальной схемой управления данным БВС, функционирующем в штатном режиме с работающими движителями, или в режиме, имитирующем отказ какой-либо из систем в составе БВС.
При этом информация, получаемая с помощью бортовой системы измерения углового положения и линейных перемещений штатной бортовой САУ (14) используется для формирования управляющих команд, реализуемых с помощью исполнительных механизмов и органов управления БВС. Для аппаратуры, функционирование которой ограничено вследствие размещения испытательного стенда внутри помещения (например, GPS, компас, магнетометр), используются имитаторы соответствующих датчиков, формирующие сигналы на основе моделирования динамики движения БВС.
Далее, в программно-аппаратном модуле выполняется моделирование работы САУ БВС (15), а также динамики полета исследуемого БВС (16), включая расчет сил и моментов, действующих на БВС, и угловое и траекторное движение БВС (1), обеспечивая расчет (17) траектории перемещения и угловой ориентации узла подвеса (2) БВС к роботизированному манипулятору (3).
Рассчитанные траектория и ориентация узла подвеса передаются в систему управления манипулятором (18), обеспечивающую перемещение динамометрического узла подвеса (2) крепления БВС (1) к манипулятору (3) в соответствии с результатами моделирования динамики полета с учетом динамики и кинематики роботизированного манипулятора (3).
Кроме того, при расчете перемещения узла подвеса (2) учитываются измеренные значения сил и моментов, действующих со стороны узла подвеса (2) на БВС (1), что позволяет скорректировать управление перемещением манипулятора (3) для обеспечения движения БВС (1), близкого к свободному, путем формирования управляющих команд, минимизирующих силы и моменты в узле подвеса (2).
В процессе движения БВС (1) по заданной траектории формируют воздушные потоки с использованием системы имитации внешних ветровых воздействий, включающей в себя неподвижный массив блоков вентиляторов (4) ("Аэростена") и один или несколько подвижных массивов блоков вентиляторов (5), перемещение и ориентация которого (которых) обеспечивают с помощью роботизированного манипулятора (6), управляемого блоком управления перемещением подвижного массива блоков вентиляторов (19). Также, опционально может быть использован имитатор атмосферных осадков, например, дождя, в виде комплекта форсунок (8), расположенных над зоной перемещения БВС, обеспечивающего подачу воды с заданным расходом и каплями заданного размера и с переменной интенсивностью подачи, управляемой в соответствии с заданными атмосферными условиями синхронно с перемещением БВС по траектории. Заданные условия обеспечиваются блоком управления атмосферной обстановкой (12).
При этом неподвижный массив блоков вентиляторов (4) обеспечивает поток воздуха постоянного направления с переменными по времени и по сечению потока значениями скорости ветра, задаваемыми с помощью программно-аппаратного модуля управления блоками вентиляторов (20). Подвижный массив блоков вентиляторов (5) при работе совместно с неподвижным массивом имитирует порывы ветра в поперечном или вертикальном направлении путем соответствующего перемещения и изменения ориентации. Кроме того, подвижный массив блоков вентиляторов (5) может заменять в ряде случаев неподвижный блок (4) и обеспечивать поток воздуха заданного направления, например - встречного или поперечного, путем перемещения блока (5) в пространстве, синхронизированного с перемещением БВС (1).
Интенсивность потока воздуха (22) от каждого блока вентиляторов (4) и (5) задается блоком управления (20) на основании информации о заданной ветровой обстановке и расчетном положении БВС на траектории.
Влияние ветра на динамику полета БВС при моделировании траекторного и углового движения БВС учитывается путем расчета дополнительных сил и моментов, действующих на БВС (21).
Заданные условия полета - траектории движения БВС и интенсивности атмосферных воздействий воспроизводятся многократно, а потребное число воспроизведений зависит от выбранного алгоритма обучения или настройки САУ.
На основании многократно полученной информации, поступающей от динамометрического узла крепления (2) и от систем БВС (1), с учетом информации о заданной траектории движения (17) и имитируемой метеорологической обстановке (ветер, осадки) (8, 22), в блоке регистрации (23) в процессе полунатурных испытаний формируется массив данных, необходимых для выполнения настройки и обучения САУ с помощью алгоритмов, реализованных в блоке настройки и обучения (24), при этом каналы настройки (25) могут управлять изменением как параметров модели САУ (15), так и параметров бортовой САУ (14) непосредственно в процессе испытаний.
Таким образом, посредством воспроизведения с помощью моделирующего стенда и роботизированного манипулятора в реальном масштабе времени пространственного движения БВС в поле воздушных потоков и атмосферных осадков, создаваемых имитаторами осадков и подвижными и неподвижным массивами вентиляторов с переменной интенсивностью, изменяемой в соответствии с перемещением БВС, управляемым реальной САУ, по моделируемым траектории и метеорологическим условиям полета, осуществляется настройка и обучение адаптивных и интеллектуальных САУ БВС. При этом перемещение БВС осуществляется в моделируемом поле неоднородного ветрового потока и с переменной интенсивностью осадков, сочетание которых может быть многократно воспроизведено для целей настройки и обучения адаптивных и интеллектуальных САУ БВС.
Кроме того, с использованием предлагаемого испытательного стенда возможно проведение натурных испытаний САУ БВС с реально функционирующими системами, такими, как приводы системы управления, органы управления БВС, средства создания подъемной и пропульсивной сил и другие.
БИБЛИОГРАФИЯ
1. Патент на изобретение №2771692 «Способ полунатурных роботизированных исследований и испытаний систем управления беспилотных воздушных судов вертикального взлета и посадки», 2022 г.
2. Патент на изобретение №2774479 «Способ идентификации и валидации математической модели динамики полета и систем управления беспилотных воздушных судов вертикального взлета и посадки (БВС ВВП) с использованием роботизированного стенда полунатурного моделирования», 2022 г.
3. Patent WO 2020163432 A1 «System and Method for Wind Tunnel Testing a UAS in a Fully Autonomous Operating Mode», 2020.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ полунатурных роботизированных исследований и испытаний систем управления беспилотных воздушных судов вертикального взлета и посадки (БВС ВВП) | 2021 |
|
RU2771692C1 |
| Наземный подвижный стенд и способ его применения для испытаний системы автоматического управления дозаправкой в воздухе | 2023 |
|
RU2819151C1 |
| Способ получения самоорганизуемой плазмы низкого давления | 2024 |
|
RU2827589C1 |
| Способ подготовки парашютистов и устройство его реализующее | 2019 |
|
RU2730759C1 |
| Стенд полунатурного моделирования движения летательного аппарата с цифровой системой управления | 2022 |
|
RU2786280C1 |
| ТРЕНАЖЁР ДЛЯ ОТРАБОТКИ ПРЫЖКОВ С ПАРАШЮТОМ (ВАРИАНТЫ) | 2019 |
|
RU2713681C1 |
| Комплекс полунатурного моделирования движения авиационного средства поражения | 2021 |
|
RU2767712C1 |
| Малогабаритное бортовое радиоэлектронное устройство для управления пилотажно-навигационным комплексом беспилотного летательного аппарата | 2021 |
|
RU2799748C2 |
| ИМИТАЦИОННАЯ МОДЕЛЬ СИСТЕМЫ УПРАВЛЕНИЯ ВОЗДУШНОЙ МИШЕНЬЮ НА ОСНОВЕ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА ИЗ СОСТАВА МИШЕННОГО КОМПЛЕКСА | 2020 |
|
RU2782035C2 |
| СПОСОБ МОДЕЛИРОВАНИЯ НА ПИЛОТАЖНОМ СТЕНДЕ ПОПАДАНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА В ВИХРЕВОЙ СЛЕД | 2018 |
|
RU2701062C1 |
Изобретение относится к способу полунатурных испытаний беспилотных воздушных судов (БВС), содержащих адаптивные и интеллектуальные системы автоматического управления (САУ), с использованием роботизированной системы подвижности и системы имитации атмосферных условий. Обеспечивают многократное воспроизведение заданного управляемого пространственного движения БВС. Создают воздушно-ветровую обстановку с переменной интенсивностью, изменяемой по заданному закону синхронно с перемещением БВС по моделируемой траектории. Регистрируют параметры движения БВС и воздушно-ветровых условий, фактические значения параметров движения и ориентации БВС, управляющие команды, формируемые САУ, и их реализацию органами управления, а также результаты измерения компонентов сил и моментов в узле подвеса. Производят обучение и настройку адаптивных и интеллектуальных САУ, а также последующую оценку результатов обучения. Обеспечивается повышение информативности результатов испытаний. 2 з.п. ф-лы, 2 ил.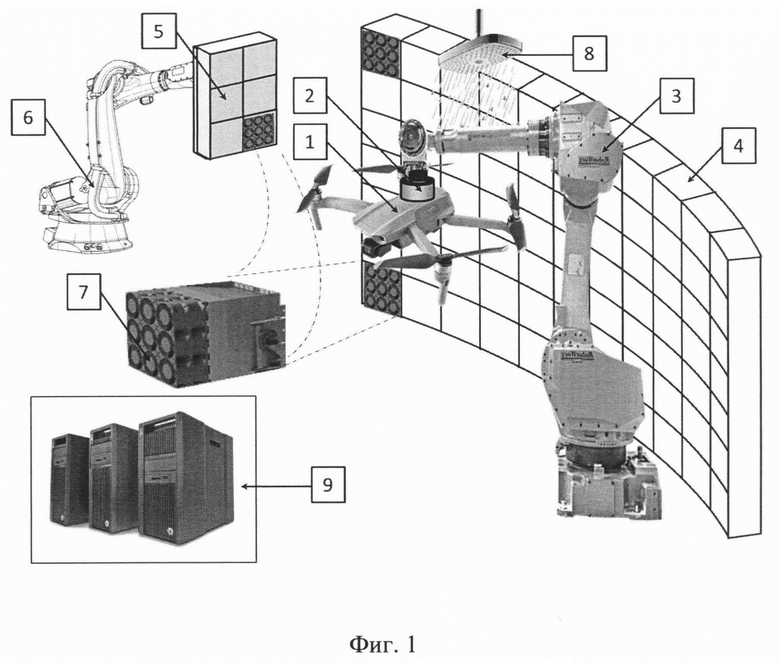
1. Способ полунатурных испытаний беспилотных воздушных судов (БВС), содержащих адаптивные и интеллектуальные системы автоматического управления (САУ), с использованием роботизированной системы подвижности и системы имитации атмосферных условий, характеризующийся тем, что
- с помощью роботизированной системы подвижности, состоящей из роботизированного манипулятора, обеспечивающего линейные и угловые перемещения БВС, и динамометрического узла подвеса, посредством которого закрепляют БВС, обеспечивают многократное воспроизведение заданного управляемого пространственного движения БВС с моделируемыми в реальном масштабе времени или с реально функционирующими бортовыми системами, приводами и органами управления, а также средствами создания подъемной и пропульсивной силы;
- с помощью системы имитации атмосферных условий создают воздушно-ветровую обстановку с переменной интенсивностью, изменяемой по заданному закону синхронно с перемещением БВС по моделируемой траектории;
- регистрируют параметры заданного управляемого пространственного движения БВС и воздушно-ветровых условий, фактические значения параметров движения и ориентации БВС, соответствующие управляющие команды, формируемые САУ, и их реализацию органами управления, а также результаты измерения компонентов сил и моментов в узле подвеса;
- на основании многократно зарегистрированной информации об условиях полета, значениях параметров движения БВС и управляющих воздействий, а также компонентов сил и моментов в узле подвеса производят обучение и настройку адаптивных и интеллектуальных САУ, а также последующую оценку результатов обучения.
2. Способ полунатурных испытаний по п. 1, отличающийся тем, что система имитации атмосферных условий обеспечивает воздушно-ветровую обстановку посредством неподвижного массива вентиляторов с изменяемыми по времени и по сечению потока характеристиками интенсивности ветрового воздействия, а также подвижного массива вентиляторов, позволяющего изменять дополнительно направление ветрового воздействия посредством изменения положения и ориентации массива вентиляторов с помощью роботизированного манипулятора, управляемого синхронно с остальными компонентами испытательного стенда.
3. Способ полунатурных испытаний по п. 1, отличающийся тем, что система имитации атмосферных условий дополнительно обеспечивает имитацию атмосферных осадков посредством комплекта форсунок, расположенных над зоной перемещения БВС, при этом интенсивность подачи воды через форсунки изменяется в соответствии с заданными атмосферными условиями синхронно с перемещением БВС по траектории.
| Способ полунатурных роботизированных исследований и испытаний систем управления беспилотных воздушных судов вертикального взлета и посадки (БВС ВВП) | 2021 |
|
RU2771692C1 |
| RU 2774479 C1, 21.06.2022 | |||
| WO 2020163432 A1, 13.08.2020 | |||
| CN 110901952 А, 24.03.2020 | |||
| US 20160246304 А1, 25.08.2016 | |||
| CN 108100297 А, 01.06.2018. | |||
