Изобретение относится к области гироскопической техники и может быть использовано для определения параметров трехканальных блоков акселерометров (далее - БА) с целью повышения точности (уменьшения погрешности) измерения действующих ускорений на подвижном объекте в составе инерциальной навигационной системе (далее - ИНС).
В состав БА входят три независимых канала измерения, измерительные оси чувствительных элементов которых расположены по трем взаимно перпендикулярным осям. Каждый канал БА состоит из чувствительного элемента и платы обратной связи, работающей в режиме широтно-импульсной модуляции. В качестве чувствительных элементов в каналах БА используется поплавковый маятниковый прибор на торсионном подвесе с жидкостным демпфированием. Выходные сигналы каналов БА представлены в виде цифровых кодов.
Для высокоточных акселерометров, используемых в ИНС морского применения, требуется в процессе калибровки на стенде предприятия-изготовителя с высокой точностью определять паспортные параметры каналов БА:
Кпх, Кпу, Kgz, - коэффициенты преобразования для каждого канала БА;
Wox, Woy, Woz - значения смещения нуля для каждого канала БА;
Ккх, Кку, Ккz - значения коэффициентов квадрата ускорения для каждого канала БА;
Кху, Kxz, Кух, Kyz, Kzx, Kzy - значения коэффициентов перекрестных связей для каждого канала БА;
αх - азимутальный угол отклонения измерительной оси канала X БА от нормали к установочной плоскости;
βх - вертикальный угол отклонения измерительной оси канала X БА от нормали к установочной плоскости;
αу - азимутальный угол отклонения измерительной оси канала Y БА от нормали к установочной плоскости;
γy - вертикальный угол отклонения измерительной оси канала Y БА от нормали к установочной плоскости,
βz - вертикальный угол отклонения измерительной оси канала Z БА от нормали к установочной плоскости;
γz - азимутальный угол отклонения измерительной оси канала Z БА от нормали к установочной плоскости.
Преобразование выходных сигналов каналов БА в измеренные значения ускорений относительно базовых направлений ИНС осуществляется по формулам:
Wxп=Wxp ⋅ (1+Wxp⋅Kкx+Wyp⋅Kxy+Wzp⋅Kxz)+Wyp⋅Sinαx+Wzp⋅Sinβx;
Wyп=Wyp ⋅ (1+Wyp⋅Kкy+Wxp⋅Kуx+Wzp⋅Kyz)+Wxp⋅Sinαy+Wxp⋅Sinγy;
Wzп=Wzp ⋅ (1+Wzp⋅Kкz+Wzp⋅Kzx+Wyp⋅Kzy)+Wxp⋅Sinβz+Wyp⋅Sinγz;
Wxp=Kпx⋅Nx+Wox;
Wyр=Kпy⋅Ny+WOy;
Wzp=Kпz⋅Nz+Woz.
где
Wxп, Wyп, Wzп - измеренное каналами БА ускорение,.
Nx, Ny, Nz - выходные сигналы каналов БА,
Wхр, Wyр, Wzp - выходные сигналы каналов БА преобразованные в ускорения.
Известен способ калибровки одноосных акселерометров [1], заключающийся в установке его на планшайбе одноосного поворотного устройства (далее - ПУ), фиксации показаний акселерометра и угла разворота планшайбы вокруг оси ПУ при нескольких значениях угла разворота ПУ в диапазоне ускорений ±1 g, расчете паспортных параметров акселерометра по зафиксированным данным. При применении данного способа к калибровке трехосного БА требуется проведение измерений при установке БА в два положения, что не позволяет обеспечить требуемую точность калибровки ввиду погрешностей, вносимых неоднозначностью углового положения БА при его переустановке на планшайбе ПУ. Кроме того, определение паспортных параметров производится при ориентации акселерометра, не полностью соответствующей рабочему положению в условиях подвижного объекта, что является источником дополнительных погрешностей калибровки и приводит к увеличению погрешностей измерения ускорений.
В принятом в качестве прототипа способе калибровки БА [2] предложено определять паспортные параметры БА на одноосном ПУ при установке БА на специальном приспособлении, обеспечивающем ориентацию акселерометра относительно горизонта в процессе калибровки, соответствующую рабочему положению в условиях подвижного объекта. Однако необходимость установки БА на приспособлении в два положения для определения полного набора паспортных параметров сохраняется.
Решаемая техническая проблема - исключение переустановок БА при калибровке для получения достоверных параметров каналов БА, обеспечивающих минимальные значения погрешностей измерения ускорений каналами до уровня 0,00012 м/с в условиях, соответствующих рабочему положению Б А на подвижном объекте.
Достигаемый технический результат - уменьшение погрешностей измерения ускорений каналами БА до уровня 0,00012 м/с за счет приближения условий его стендовой калибровки к условиям его использования в составе ИНС и исключения погрешностей, обусловленных переустановкой Б А в процессе калибровки.
Предлагаемый подход обеспечивает также повышение определения достоверности определения паспортных параметров БА и снижение погрешностей измерения ускорения в условиях эксплуатации до уровня нестабильности смещения нуля БА.
В предлагаемом способе стендовой калибровки трехканальный БА с помощью специального приспособления устанавливается на планшайбе ПУ с одной осью вращения (далее - основное ПУ) в одно фиксированное на приспособлении положение, основное ПУ устанавливается на планшайбу дополнительного ПУ, обеспечивающего возможность изменения угла наклона оси вращения планшайбы основного ПУ.
Для обеспечения требуемого температурного режима, соответствующего условиям использования в ИНС, на приспособление дополнительно устанавливается термостатирующее устройство.
Реализация предлагаемого способа
Производится включение БА и термостатирующего устройства и после выхода температуры в требуемое значение фиксируются значения выходных сигналов БА, показаний углов поворота планшайбы основного ПУ и наклона дополнительного ПУ при нескольких значениях угла поворота планшайбы основного ПУ, полученных при задании нескольких значений угла наклона дополнительного ПУ После чего производится расчет паспортных параметров каналов БА по зафиксированным данным.
В предлагаемом способе калибровки исключаются положения, при которых на вертикальный (Z) канал БА действуют отрицательные ускорения, что не бывает при эксплуатации морских ИНС.
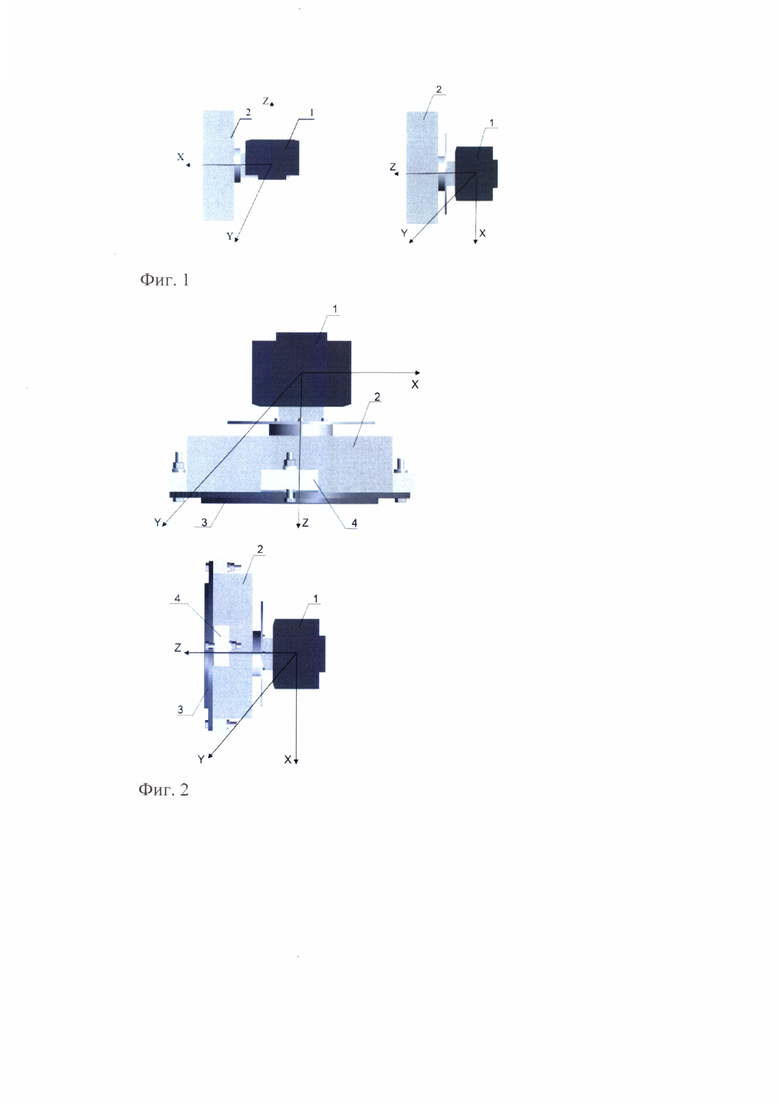
На фиг. 1 представлены виды с ориентацией БА, установленного с помощью специального приспособления на планшайбе основного ПУ (прототипа) в двух различных положениях БА.
На фиг. 2 (предлагаемый способ) представлены на стенде виды с ориентацией БА, установленного с помощью специального приспособления на планшайбе основного ПУ, ось вращения (направление канала Z) которой в процессе калибровки изменяет наклон за счет наклона планшайбы дополнительного ПУ (наклоны 90° и 0°).
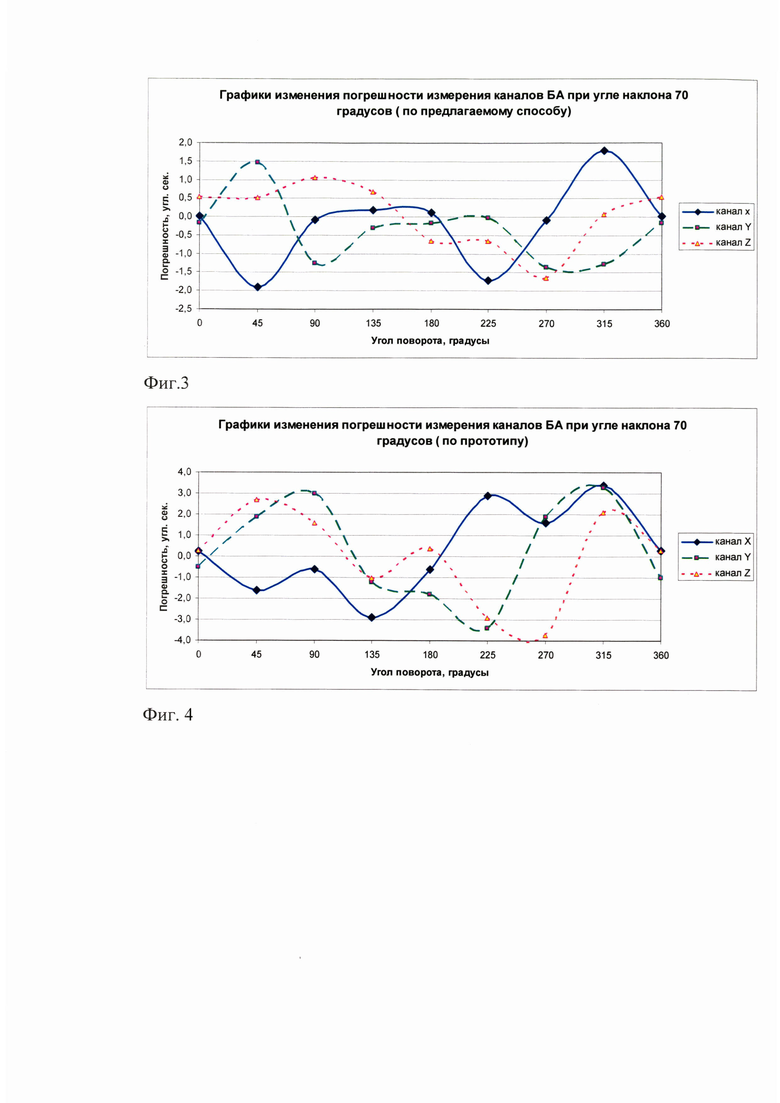
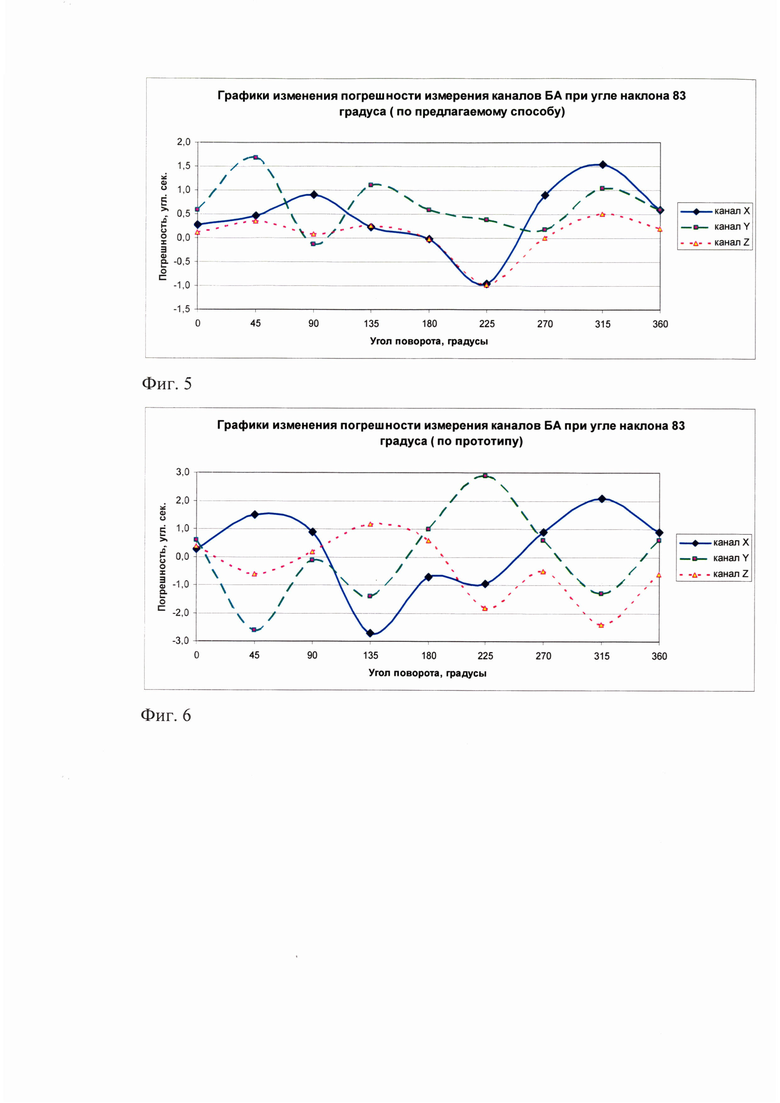
На фиг. 3 и 5 приведены графики погрешностей измерения каналов БА при двух значениях наклона оси вращения шпинделя основного ПУ по предлагаемому способу.
На фиг. 4 и 6 приведены графики погрешностей измерения каналов БА при двух значениях наклона оси вращения шпинделя основного ПУ с использованием по способу-прототипу.
На фиг. 1, 2 приняты следующие обозначения:
1 - блок акселерометров
2 - основное ПУ
3. - планшайба дополнительного ПУ
4. - узлы фиксации основного ПУ на планшайбе дополнительного ПУ, дополнительное ПУ на фиг. не показано.
В качестве основного ПУ предлагается использовать углоизмерительной прибор с цифровой индикацией УМ1-Ц (далее - прибор УМ1-Ц) с погрешностью задания угла поворота планшайбы не более 0,5 угл. сек.
В качестве дополнительного ПУ предлагается использовать стол поворотный делительный универсальный с цифровой индикацией СУ50-1101 (далее - поворотный стол) с погрешностью задания угла 6 угл. сек.
За счет использования указанного оборудования, существенно уменьшается погрешность при определении действующих ускорений, которые используются при расчете паспортных параметров каналов БА.
В предлагаемом способе калибровка каналов БА осуществляется в следующей последовательности:
1. Поворотным столом устанавливается угол наклона оси вращение планшайбы прибора УМ1-Ц в горизонт (угол наклона 90°). Производится регистрация выходных сигналов каналов БА при углах поворота шпинделя УМ1-Ц, равных 0°, 45°, 90°, 135°, 180°, 225°, 270°, 315°, 360°.
2. Поворотным столом устанавливается угол наклона оси вращение планшайбы прибора УМ1-Ц, равный 60°. Производится регистрация выходных сигналов каналов Б А при углах поворота шпинделя УМ1-Ц равных 0°, 45°, 90°, 135°, 180°, 225°, 270°, 315°, 360°.
3. Поворотным столом устанавливается угол наклона оси вращение планшайбы прибора УМ1-Ц равный 45°. Производится регистрация выходных сигналов каналов Б А при углах поворота шпинделя УМ1-Ц равных 0°, 45°, 90°, 135°, 180°, 225°, 270°, 315°, 360°.
4. Поворотным столом устанавливается угол наклона оси вращение планшайбы прибора УМ1-Ц, равный 30°. Производится регистрация выходных сигналов каналов Б А при углах поворота шпинделя УМ1-Ц равных 0°, 45°, 90°, 135°, 180°, 225°, 270°, 315°, 360°.
5. Поворотным столом устанавливается угол наклона оси вращение планшайбы прибора УМ1-Ц, равный 15°. Производится регистрация выходных сигналов каналов Б А при углах поворота шпинделя УМ1-Ц равных 0°, 45°, 90°, 135°, 180°, 225°, 270°, 315°, 360°
6. Поворотным столом устанавливается угол наклона оси вращение планшайбы прибора УМ1-Ц, равный 10°. Производится регистрация выходных сигналов каналов Б А при углах поворота шпинделя УМ1-Ц равных 0°, 45°, 90°, 135°, 180°, 225°, 270°, 315°, 360°.
7. Поворотным столом устанавливается угол наклона оси вращение планшайбы прибора УМ1-Ц, равный 5°. Производится регистрация выходных сигналов каналов Б А при углах поворота шпинделя УМ1-Ц равных 0°, 45°, 90°, 135°, 180°, 225°, 270°, 315°, 360°
8. Поворотным столом устанавливается угол наклона оси вращение планшайбы прибора УМ1-Ц, равный 3°. Производится регистрация выходных сигналов каналов Б А при углах поворота шпинделя УМ1-Ц равных 0°, 45°, 90°, 135°, 180°, 225°, 270°, 315°, 360°.
9. Поворотным столом устанавливается угол наклона оси вращение планшайбы прибора УМ1-Ц, равный 0°. Производится регистрация выходных сигналов каналов Б А при углах поворота шпинделя УМ1-Ц равных 0°, 45°, 90°, 135°, 180°, 225°, 270°, 315°, 360°.
Для выполнения расчетов паспортизуемых параметров каналов БА введем обозначения выходных сигналов NX(j), NYi(j), NZi(j), где
i - значение угла поворота планшайбы прибора УМ1-Ц,
j - значение угла наклона оси вращения планшайбы прибора УМ1-Ц.
В результате выполнения калибровки по каждому каналу получен массив из 81 данных.
Используя данные выходных сигналов каналов X и Y, полученные при j=0, на основании формул, приведенных в определяем для указанных каналов значения Кпх, Kпy, Wox, Woy.
Для каждого положения j определяем значения Wxp, Wyp при всех значениях i. На основании полученных данных определяем угол наклона оси вращения планшайбы прибора УМ1-Ц и, учитывая, что корень квадратный из суммы квадратов измеренных ускорений по трем взаимно перпендикулярным осям величина постоянная и равна 1 g [2], определяем значения Kпz, Woz, Для каждого положения j определяем значения Wzp, при всех значениях i.
На основании полученных значений Wxpi(j), Wypi(j), Wzpi(j) определяем погрешность измерения действующего ускорения в каждой ориентации БА без учета углов неортогональности, коэффициентов квадрата ускорений и перекрестных связей. По результатам определения погрешностей рассчитываем для каждого канала значения углов αх, αу, βх, βz, γy, γz и минимизируем погрешность за счет учета рассчитанных углов. По результатам минимизации погрешности рассчитываем коэффициенты Ккх, Кку, Kкz, Кху, Кхz и, Кyx, Kyz, Kzx, Kzy.
С использованием полученных паспортных параметров каналов БА определяется окончательная погрешность измерения действующих на каналы БА ускорений и производится уточнение паспортных параметров каналов БА для обеспечения минимизации погрешности измерения в условиях приближенных к условиям его использования в составе морской ИНС.
После уточнения паспортных параметров каналов БА проверяется погрешность в нескольких ориентациях БА, соответствующих условиям его использования на подвижном объекте в составе ИНС, не используемых при выполнении калибровки.
Использование предлагаемого способа позволило в 1,5 раза уменьшить погрешности измерения ускорений до уровня 0,00010 м/с2 (не более 2,0 угл. сек.) в требуемом при использовании в морских ИНС диапазоне измерения, в том числе за счет использования предлагаемого оборудования, позволяющего в 2-3 раза уменьшается погрешность при определении действующих ускорений, которые используются при расчете паспортных параметров каналов БА. В результате значения паспортных параметров БА определяются с минимальной погрешностью.
Таким образом заявляемый технический результат достигнут.
Литература:
1. А.Е. Синельников. Низкочастотные линейные акселерометры. Методы и средства проверки и градуировки // М.: Издательство стандартов, 1979.
2. Д.О. Тарановский. Стендовая калибровка блока маятниковых поплавковых акселерометров корабельной инерциальной навигационной системы // СПб: Гироскопия и навигация, 2008, №4, с. 56-65.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОРРЕКТИРУЕМАЯ СИСТЕМА ИНЕРЦИАЛЬНОЙ НАВИГАЦИИ И СТАБИЛИЗАЦИИ | 2006 |
|
RU2319930C2 |
| ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА НАВИГАЦИИ, ОРИЕНТАЦИИ И СТАБИЛИЗАЦИИ | 2008 |
|
RU2375679C2 |
| Способ измерения ошибок начальной выставки инерциальной навигационной системы без привязки к внешним ориентирам | 2021 |
|
RU2779274C1 |
| АВТОНОМНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ НАЧАЛЬНОЙ ОРИЕНТАЦИИ ПРИБОРНОЙ СИСТЕМЫ КООРДИНАТ БЕСПЛАТФОРМЕННОГО ИНЕРЦИАЛЬНОГО БЛОКА УПРАВЛЯЕМОГО ОБЪЕКТА ОТНОСИТЕЛЬНО БАЗОВОЙ СИСТЕМЫ КООРДИНАТ | 2008 |
|
RU2386107C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ МОДЕЛИ ПОГРЕШНОСТЕЙ ИЗМЕРЕНИЙ АКСЕЛЕРОМЕТРОВ ВЕДОМОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ ПО ИЗМЕРЕНИЯМ ЭТАЛОННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2012 |
|
RU2505785C1 |
| УСТРОЙСТВО ДЛЯ ВОСПРОИЗВЕДЕНИЯ УГЛОВОЙ СКОРОСТИ (МЕРА УГЛОВОЙ СКОРОСТИ) НА ОСНОВЕ МНОГОЗНАЧНОЙ ГОЛОГРАФИЧЕСКОЙ МЕРЫ ПЛОСКОГО УГЛА | 2010 |
|
RU2429490C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕМПЕРАТУРНЫХ ЗАВИСИМОСТЕЙ МАСШТАБНЫХ КОЭФФИЦИЕНТОВ, СМЕЩЕНИЙ НУЛЯ И МАТРИЦ ОРИЕНТАЦИИ ОСЕЙ ЧУВСТВИТЕЛЬНОСТИ ЛАЗЕРНЫХ ГИРОСКОПОВ И МАЯТНИКОВЫХ АКСЕЛЕРОМЕТРОВ В СОСТАВЕ ИНЕРЦИАЛЬНОГО ИЗМЕРИТЕЛЬНОГО БЛОКА ПРИ СТЕНДОВЫХ ИСПЫТАНИЯХ | 2014 |
|
RU2566427C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ МОДЕЛИ ПОГРЕШНОСТЕЙ ИЗМЕРЕНИЙ АКСЕЛЕРОМЕТРОВ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ ПО ИЗМЕРЕНИЯМ СПУТНИКОВОЙ НАВИГАЦИИ | 2012 |
|
RU2504734C1 |
| ИЗМЕРИТЕЛЬ ПОЛОЖЕНИЯ ТРУБНОГО СТАВА | 1991 |
|
RU2031368C1 |
| СПОСОБ ФОРМИРОВАНИЯ БАРОИНЕРЦИАЛЬНОЙ ВЫСОТЫ И ВЕРТИКАЛЬНОЙ СКОРОСТИ | 2019 |
|
RU2713583C1 |
Изобретение относится к области гироскопической техники. Технический результат - повышение точности определения паспортных параметров блока акселерометров (БА). В способе стендовой калибровки трехканального блока акселерометров, блок акселерометров, предназначенный для использования в морских инерциальных навигационных системах (ИНС), устанавливается на планшайбе основного поворотного устройства (ПУ) в одно фиксированное положение, данное ПУ устанавливается на планшайбу дополнительного ПУ с возможностью изменения угла наклона оси вращения планшайбы. БА с помощью основного и дополнительного ПУ устанавливается в различные ориентации, в каждой ориентации фиксируются значения выходных сигналов каналов БА, после чего производится предварительный расчет паспортных параметров БА, с использованием паспортных параметров оценивается погрешность измерения действующих ускорений и производится уточнение паспортных коэффициентов. 6 ил.
Способ стендовой калибровки трехканального блока акселерометров (БА), заключающийся в последовательной установке его на планшайбе одноосного основного поворотного устройства (ПУ) с горизонтальной осью вращения в двух различных положениях, фиксации в каждом из положений показаний БА и угла поворота планшайбы вокруг оси ПУ при нескольких значениях угла поворота планшайбы, расчете паспортных параметров БА, отличающийся тем, что БА устанавливается на планшайбе основного ПУ в одно положение, при этом основное ПУ устанавливается на планшайбу дополнительного ПУ с изменением наклона оси вращения планшайбы основного ПУ, при этом на приспособление дополнительно устанавливается термостатирующее устройство, причем основным ПУ углоизмерительного прибора является устройство с погрешностью задания угла поворота планшайбы не более 0,5 угл. сек., а дополнительным ПУ является поворотный стол делительный универсальный с погрешностью задания угла 6 угл. сек., при этом осуществляют включение БА и термостатирующего устройства и после выхода температуры в требуемое значение фиксируют значения выходных сигналов БА, показаний углов поворота планшайбы основного ПУ и наклона дополнительного ПУ при нескольких значениях угла поворота планшайбы основного ПУ, полученных при задании нескольких значений угла наклона дополнительного ПУ, после чего производят расчет паспортных параметров каналов БА по зафиксированным данным, с использованием полученных паспортных параметров каналов БА определяют окончательную погрешность измерения, действующих на каналы БА ускорений, и осуществляют уточнение паспортных параметров каналов БА для обеспечения минимизации погрешности измерения в условиях, приближенных к условиям его использования в составе морской инерциальной навигационной системы (ИНС), после уточнения паспортных параметров каналов БА проверяют погрешность в нескольких ориентациях БА, соответствующих условиям его использования на подвижном объекте в составе ИНС, не используемых при выполнении калибровки.
| СПОСОБ КОМПЛЕКСНЫХ ИСПЫТАНИЙ БЕСПЛАТФОРМЕННЫХ ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ БЛОКОВ НА ОСНОВЕ МИКРОМЕХАНИЧЕСКИХ ГИРОСКОПОВ И АКСЕЛЕРОМЕТРОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2256880C1 |
| CN 101852818 A, 06.10.2010 | |||
| KR 101393270 B1, 27.05.2014 | |||
| УНИВЕРСАЛЬНЫЙ ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2012 |
|
RU2494345C1 |
| СПОСОБ ОЦЕНКИ ОШИБОК И КОНТРОЛЯ ДАТЧИКОВ ПЕРВИЧНОЙ ИНФОРМАЦИИ В СОСТАВЕ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ В НАЗЕМНЫХ УСЛОВИЯХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2537513C2 |

