Изобретение относится к области внутритрубной диагностики технологических, промысловых, магистральных трубопроводов нефтегазовой, химической отрасли и комплексов жилищно-коммунальных хозяйств. Может найти широкое применение при диагностике линейной части трубопровода, наклонных и вертикальных участков, трубопроводных участков с наличием отводов, а также с изменением поперечного диаметра (овализация, гофры, вмятины) трубопровода.
Известен самоходный робот для телеинспекции трубопроводов S100, основными элементами которого является самоходное робототехническое устройство и видеокамера. В свою очередь, робот содержит несущее основание, на котором расположены две пары колес вращения, снабженные электромеханизмами передачи крутящего момента. На несущем основании робота также расположена инспекционная видеокамера со световым освещением, которая отправляет информацию на пульт управления. Робот снабжен кабелем для передачи информации на пульт, который намотан на барабан, расположенный вне трубопровода. Передача команд с пульта управления роботу осуществляется следующим образом, с пульта управления передается сигнал роботу, который обрабатывает сигнал и распределяет его по периферийным устройствам. Перемещение робота осуществляется от электромеханизмов, которые передают крутящий момент колесам. Видеоизображение отправляется на пульт управления по кабелю при помощи инспекционной видеокамеры. Самоходный робот для телеинспекции трубопроводов S100 широко используется в подземных трубопроводах диаметром 100-600 мм, туннелях, контейнерах и других труднодоступных местах (https://xn----7sbbabgnkb1ad1bofffbbgcrnj0aa2b0b.xn--p1ai/teleinspekcija-truboprovodov/roboty/s-100)
Недостатками известного робота являются отсутствие возможности перемещения по сильнонаклонным и вертикальным участкам, возможность застопоривания при прохождении отвода, ввиду недостатков несущего основания. Наличие кабеля для управления роботом создает высокие поперечные и продольные нагрузки на сам кабель при движении робота во внутритрубном пространстве, что может привести к его разрыву и застопориванию внутри трубопровода. Дальность движения робота ограничена длиной кабеля, а его наличие снижает мобильность самого робота.
Известно транспортное средство для перемещения робота в трубопроводе сложной формы, содержащее основание с установленными на нем электродвигателем, тремя расположенными относительно друг друга под углом 120° одинаковыми колесными парами (патент №170056, опубл. 12.04.2017), механизмом передачи движения от электродвигателя на движитель с протектором и механизмом адаптации поджатая колес к поверхности трубопровода. При этом движитель выполнен в виде ремня, изготовленного с протектором на внешней, касающейся при работе устройства поверхности трубопровода, стороне и зубчатым профилем, соответствующим профилю зубчатого венца ведущего колеса, на внутренней стороне, которое совместно с редуктором представляет собой механизм передачи движения от электродвигателя на движитель, механизм передачи движения и электродвигатель расположены в передней, по ходу движения транспортного средства, его части, выполненной с возможностью качания на оси вращения ролика, обрамляемого ремнем вместе с ведущим колесом и расположенным в задней части натяжным роликом.
Недостатками известного устройства являются низкая мобильность во внутритрубном пространстве при наличии переменного диаметра трубопровода и препятствий, возможность застопоривания при прохождении отвода, ввиду отсутствия упругой системы у механизма адаптации поджатия колес к поверхности трубопровода. Кроме того, наличие движителя, выполненного в виде ремня, представляет сложность прохождение отвода или вовсе застопоривание, а также небольшой диапазон условных проходных диаметров трубопроводов (УПДТ), в которых может осуществлять свою деятельность робот.
Наиболее близким устройством того же назначения к заявленному роботу по совокупности признаков является роботизированное диагностирующее транспортное средство с трехопорной лучеобразной кинематикой, с увеличенными силой давления колес на внутреннюю поверхность трубы и коэффициентом трения. Роботизированное диагностирующее транспортное средство содержит несущее основание, с установленными на нем электромеханизмом передачи крутящего момента, тремя расположенными относительно друг друга под углом 120° опорными ногами с функцией движителя и шестью колесами, а также систему передачи движения от электродвигателя на движитель, при этом колеса оснащены протектором. Требуемая сила давления на внутритрубную поверхность обеспечена механизмом адаптации поджатая колес к поверхности трубы. (см. Голубкин И.А., Антонов О.В. «Исследования и моделирование процесса проведения дефектоскопии газопроводов мобильным колесным роботом». ISSN 2072-9502. Вестник АГТУ. Сер: Управление, вычислительная техника и информатика. 2014. №1. Стр. 20, 21). Данное устройство принято за прототип.
Признаки прототипа, являющиеся общими с заявляемым техническим решением, - несущее основание с тремя расположенными относительно друг друга под углом 120° одинаковыми опорными ногами.
Недостатками известного устройства, принятого за прототип, являются низкая динамичность устройства во внутритрубном пространстве при наличии переменного диаметра трубопровода, возможность застопоривания при наличии различных препятствий, ввиду отсутствия упругой системы механизма адаптации поджатия колес к внутритрубной поверхности. При прохождении отводов, возможно, проявление различной силы поджатия каждой колесной пары, ввиду наличия единого статичного механизма поджатия колес и отсутствия упругого механизма, компенсирующего различное давление колес к внутритрубной поверхности. Конструкция робота позволяет осуществлять перемещение в небольшом диапазоне УПДТ 85 - 190 мм.
Задачей, на решение которой направлено изобретение, является создание мобильного робота, способного перемещаться во внутритрубном пространстве в широком диапазоне диаметров трубопровода, по сильнонаклонным и вертикальным участкам при наличии переменного диаметра трубопровода, а также при наличии различных препятствий и отводов.
Поставленная задача была решена за счет того, что известный робот, содержащий несущее основание с тремя расположенными относительно друг друга под углом 120° одинаковыми опорными ногами, согласно изобретению содержит дополнительно второе несущее основание с тремя расположенными относительно друг друга под углом 120° опорными ногами, основания соединены между собой разъемным болтовым соединением, внутри каждого несущего основания расположен привод раскрытия опорных ног, на выходном валу которого расположено ведущее зубчатое колесо, на внешней стороне каждого несущего основания установлены ведомые зубчатые колеса и опорные зубчатые колеса, при этом ведущее зубчатое колесо, ведомые зубчатые колеса и опорные зубчатые колеса входят между собой в зубчатое зацепление и образуют механическую зубчатую систему перемещения опорных ног, на опорных зубчатых колесах расположены опорные ноги, выполненные по типу «труба в трубе», каждая опорная нога содержит пластину, на которой установлен упругий механизм поджатия с размещенным на нем электроприводом вращения с двумя колесами вращения, внутри одного из несущих оснований расположен контроллер управления и многодиапазонный радио приемопередатчик, связаных между собой, на одном из несущих оснований установлена многодиапазонная радиоантенна, соединенная с радио приемопередатчиком, на каждом несущем основании смонтировано устройство визуально-инструментального контроля.
Кроме того, устройство визуально-инструментального контроля содержит два соосных цилиндрических элемента, при этом второй цилиндрический элемент выполнен с возможностью перемещения относительно первого цилиндрического элемента.
Кроме того, на каждом несущем основании возможна установка датчиков акустического или электромагнитного контроля, или электромагнитно-акустического контроля.
Кроме того, между двумя несущими основаниями, возможна установка третьего несущего основания, соединенного с первым и вторым несущим основанием, при помощи болтового соединения.
Признаки заявляемого технического решения, являющиеся отличительными от прототипа, - робот дополнительно содержит еще одно несущее основание с тремя расположенными относительно друг друга под углом 120° опорными ногами; основания соединены между собой разъемным болтовым соединением; внутри каждого несущего основания расположен привод раскрытия опорных ног, на выходном валу которого установлено ведущее зубчатое колесо, которое входит в зубчатое зацепление с ведомыми зубчатыми колесами, установленными на внешней стороне каждого несущего основания, ведомые зубчатые колеса также входят в зубчатое зацепление с опорными зубчатыми колесами, которые образуют механическую зубчатую систему перемещения опорных ног; на опорных зубчатых колесах расположены опорные ноги, выполненные по типу «труба в трубе»; каждая опорная нога содержит пластину, на которой установлен упругий механизм поджатия; на упругом механизме поджатия размещен электропривод вращения с двумя колесами вращения: внутри одного из несущих оснований расположен контроллер управления и многодиапазонный радио приемопередатчик, связанных между собой; на одном из несущих оснований установлена многодиапазонная радиоантенна, соединенная с радио приемопередатчиком: на каждом несущем основании смонтировано устройство визуально-инструментального контроля, на каждом несущем основании установлены датчики акустического или электромагнитного контроля, или электромагнитно-акустического контроля; между двумя несущими основаниями установлен третье несущее основание, соединенного с первым и вторым несущим основанием, при помощи болтового соединения.
Наличие двух несущих оснований позволяет роботу принимать более устойчивое положение внутри трубопровода и располагать в нем дополнительное оборудование.
Использование механической зубчатой системы перемещения опорных ног на каждом несущем основании позволяет регулировать пространственное положение опорных ног на требуемое положение, при перемещении по внутритрубному пространству, тем самым увеличивая или уменьшая проходной диаметр робота внутри трубопровода.
Выполнение опорных ног по типу «труба в трубе» позволяет регулировать длину опорной ноги, тем самым увеличивая или уменьшая проходной диаметр робота внутри трубопровода.
Использование упругого механизма поджатия на каждой опорной ноге позволяет электроприводу вращения с двумя колесами вращения перемещаться в отводах и проезжать различные препятствия во внутритрубном пространстве.
Использование двух колес на электроприводе вращения позволяет принимать роботу более устойчивое пространственное положение во внутритрубном пространстве.
Установка контроллера управления и многодиапазонного радио приемопередатчика, на одном из несущих оснований с многодиапазонной антенной позволяет передавать и принимать радиосигналы на дальние расстояния.
Установка на каждом несущем основании устройства визуально-инструментального контроля с возможностью регулировки корпуса позволяет изменять пространственное положение визуального-инструментального контроля для определения различных дефектов.
Предлагаемый робот иллюстрируется следующими чертежами, представленными на фиг.1-3.
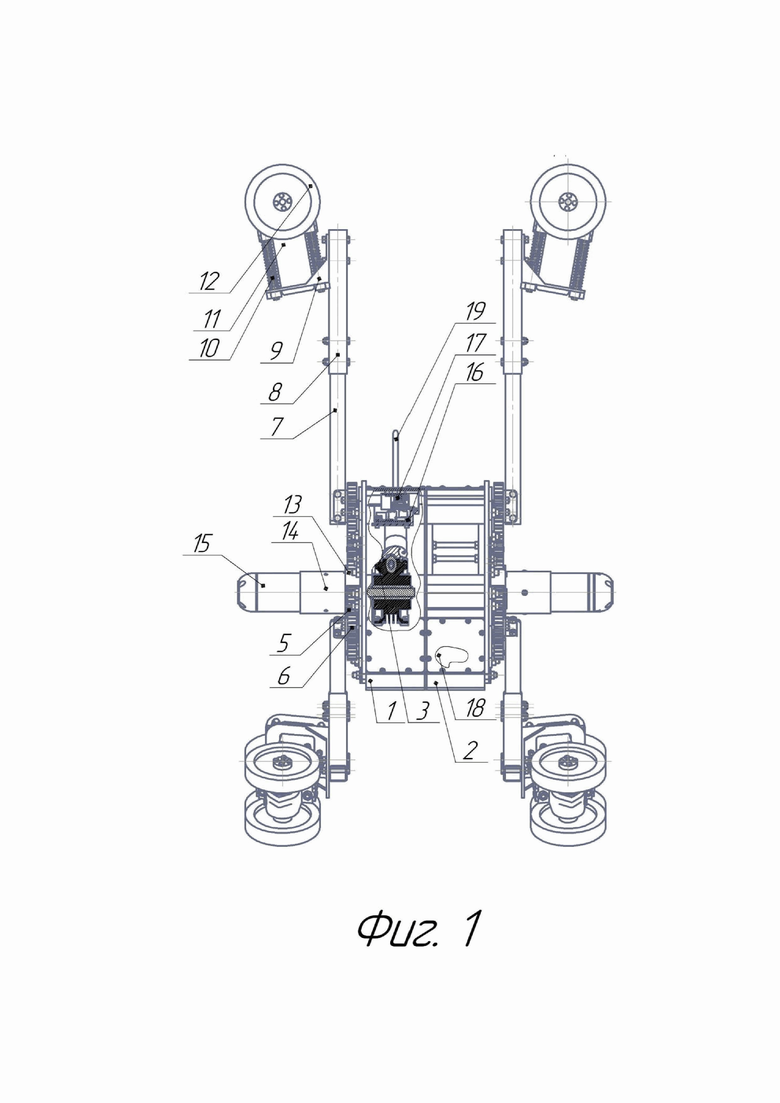
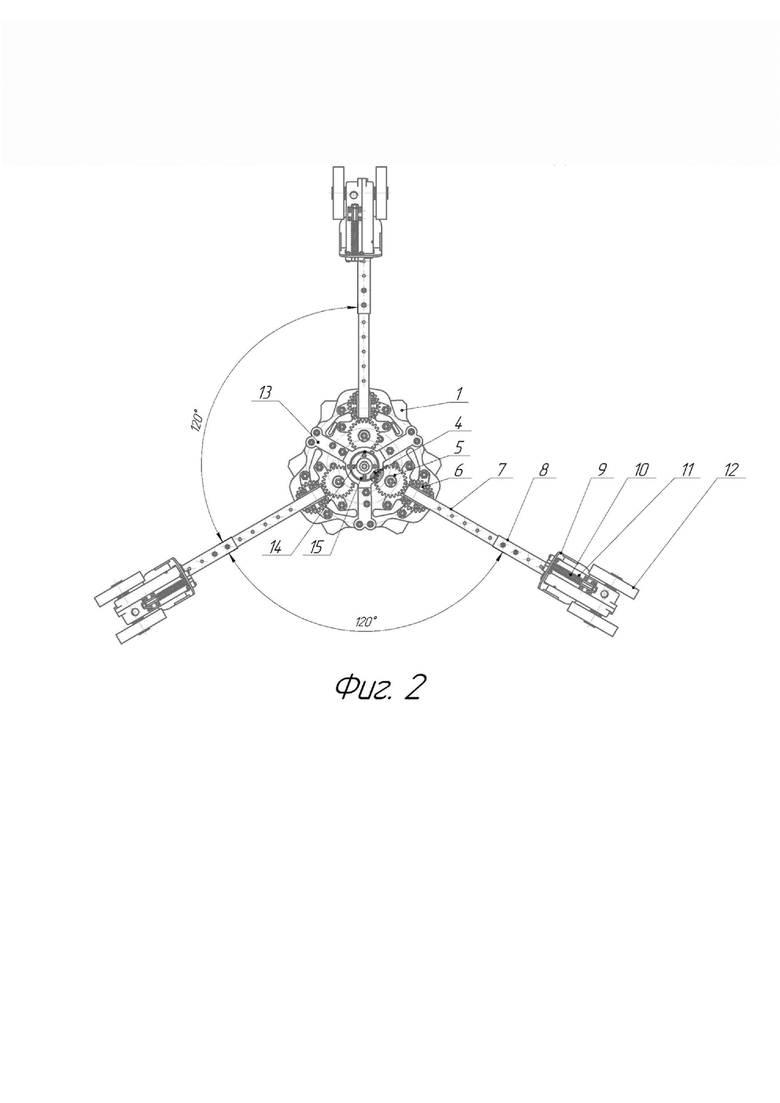
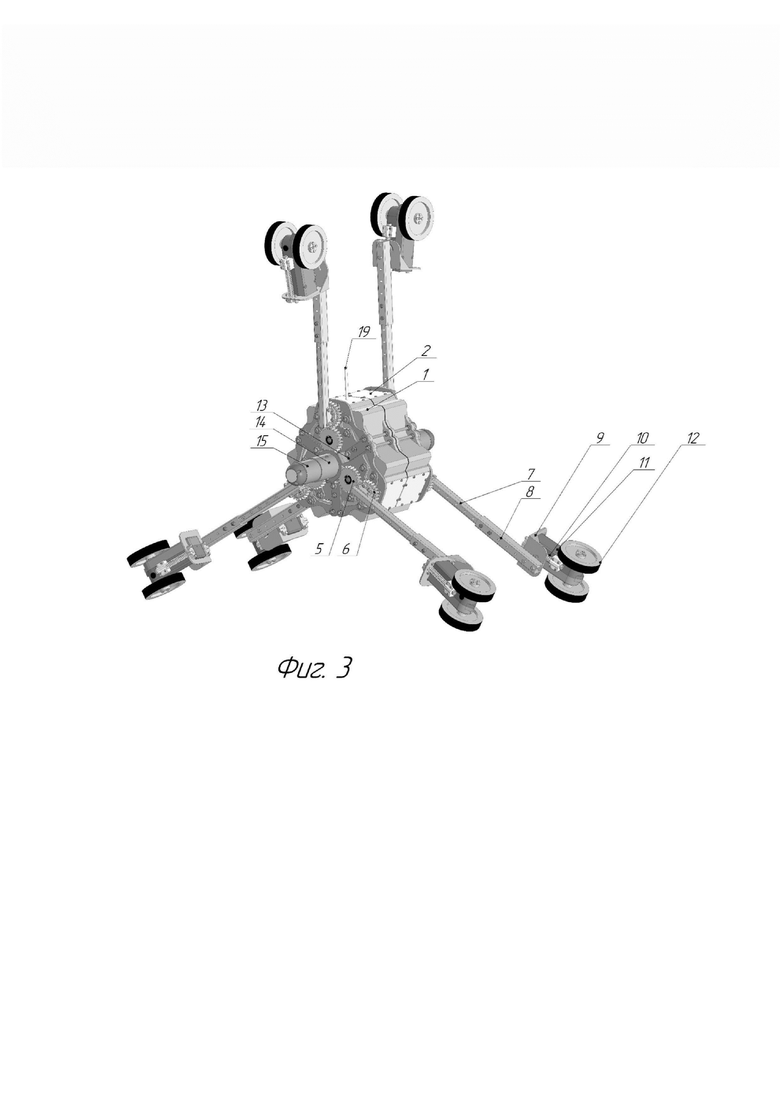
На фиг.1 представлен робот на виде справа, на фиг.2 - робот на виде спереди, на фиг 3 - общий вид робота (3D модель).
Робот содержит несущие основания 1 и 2, соединенные между собой разъемным болтовым соединением. Внутри каждого несущего основания 1, 2 установлен привод раскрытия опорных ног 3, на выходном валу которого расположена ведущее зубчатое колесо 4, на внешней стороне каждого несущего основания находятся ведомые зубчатые колеса 5 и опорные зубчатые колеса 6. В свою очередь ведущее зубчатое колесо 4, ведомые зубчатые колеса 5 и опорные зубчатые колеса 6 входят между собой в зубчатое зацепление и образуют механическую зубчатую систему перемещения опорных ног. На опорных зубчатых колесах 6 расположены опорные ноги. Каждая опорная нога состоит из двух труб 7 и 8, которые соединены между собой по типу «труба в трубе». На конце опорной ноги установлена пластина 9, на ней расположен упругий механизм поджатия 10, на котором находится электропривод вращения 11 и два колеса вращения 12 (второе колесо на фиг. не показано). На внешней стороне каждого несущего основания 1, 2 также установлено крепление корпуса визуально-инструментального контроля (ВИК) 13. Корпус ВИК содержит два соосных цилиндрических элемента 14 и 15, последний выполнен с возможностью перемещения относительно цилиндрического элемента 14. Во внутренней части цилиндрических элементов 14 и 15 установлен инструмент ВИК (на чертеже не показан).
Внутри первого несущего основания 1 установлен контроллер управления 16 и многодиапазонный радио приемопередатчик 17, связанные между собой. Внутри каждого несущего основания 1 и 2 установлен питающий элемент 18. На одном из несущих оснований расположена многодиапазонная радиоантенна 19, которая связана с многодиапазонным радио приемопередатчиком. На каждом несущем основании 1, 2 могут быть установлены датчики акустического или электромагнитного контроля, или электромагнитно-акустического контроля (на чертежах не показаны). Между двумя несущими основаниями 1, 2 может быть установлено третье несущее основание, соединенное с первым и вторым несущим основанием, при помощи болтового соединения.
Робот осуществляет свою работу следующим образом.
Предварительно производят регулировку опорных ног робота для требуемого диаметра трубопровода. Робот устанавливают во внутритрубное пространство, по центру оси трубопровода через технологический разрез или фланцевое соединение. С внешней части трубопровода находится станция управления, многодиапазонный радио приемопередатчик и многодиапазонная радиоантенна (на чертежах не показаны). Со станции управления отправляют сигнал при помощи радио приемопередатчика и многодиапазонной радиоантенны, который принимает многодиапазонная радиоантенна 19 робота, связанная с многодиапазонным радио приемопередатчиком 17, который передает сигнал в контроллер управления 16. Контроллер управления 16 включает в работу приводы раскрытия опорных ног 3 на каждом несущем основании, которые приводят во вращательное движение ведущее зубчатое колесо 4, ведомые зубчатые колеса 5 и опорные зубчатые колеса 6. Последние перемещаются на заданный угол поворота и приводной механизм раскрытия опорных ног 3 устанавливается в статическое положение. Контроллер управления 16 при помощи многодиапазонного радио приемопередатчика 17 и многодиапазонной радиоантенны 19 отправляют сигнал о выполнении команды на многодиапазонную антенну, расположенную вне трубопровода, которая связана с многодиапазонным радио приемопередатчиком и станцией управления. Далее со станции управления тем же способом отправляется сигнал о начале движения роботу, который принимает многодиапазонная радиоантенна 19, связанная с радио приемопередатчиком 17 и контроллером управления 16. Контроллер управления 16 передает сигнал о начале движения электроприводам вращения 11, которые приводят во вращательное движение колеса 12. Одновременно с началом движения происходит передача информации с инструмента ВИК (на чертеже не показан) на контроллер управления 16, который передает сигнал через многодиапазонный радио приемопередатчик 17 и многодиапазонную радиоантенну 19 на станцию управления. В зависимости от изменения поперечного диаметра трубопровода, наличия препятствий и отводов, упругий механизм поджатия 10, расположенный на каждой опорной ноге, позволяет электроприводам вращения 11 осуществлять свою деятельность на подобных участках трубопровода. Наличие двух колес вращения 12 на каждом электроприводе вращения 11 позволяют роботу занимать устойчивое положение во внутритрубном пространстве и осуществлять диагностику.
Предлагаемый робот в отличие от робота по прототипу является более динамичным и устойчивым во внутритрубном пространстве при наличии переменного диаметра трубопровода, различных препятствий и отводов, за счет использование упругого механизма поджатия колес на каждой опорной ноге к внутритрубной поверхности. Конструкция робота позволяет осуществлять перемещение в широком диапазоне диаметров трубопровода по сильнонаклонным и вертикальным участкам, за счет использования зубчатой механической системы перемещения опорных ног и выполнения опорных ног по типу «труба в трубе».
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОНОМНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ДЛЯ ДИАГНОСТИКИ ТРУБОПРОВОДОВ | 2021 |
|
RU2780829C1 |
| АДАПТИВНАЯ КОЛЕСНАЯ ОПОРА ТРАНСПОРТНОГО МОДУЛЯ ВНУТРИТРУБНОГО ДИАГНОСТИЧЕСКОГО РОБОТА | 2023 |
|
RU2821671C1 |
| ВНУТРИТРУБНЫЙ РОБОТ ДЛЯ ДИАГНОСТИКИ ТРУБОПРОВОДОВ | 2021 |
|
RU2773721C1 |
| РОБОТ ДЛЯ ВНУТРИТРУБНОЙ ДИАГНОСТИКИ | 2021 |
|
RU2784960C2 |
| ТРАНСПОРТНЫЙ МОДУЛЬ ВНУТРИТРУБНОГО ДИАГНОСТИЧЕСКОГО РОБОТА | 2022 |
|
RU2802483C1 |
| СПОСОБ УПРАВЛЕНИЯ ВНУТРИТРУБНЫМ РОБОТОМ ПРИ ЕГО ДВИЖЕНИИ ПО КРИВОЛИНЕЙНОМУ УЧАСТКУ ТРУБОПРОВОДА | 2024 |
|
RU2835290C1 |
| РОБОТ ДЛЯ ТЕХНИЧЕСКОГО КОНТРОЛЯ ТРУБОПРОВОДОВ И СЛОЖНЫХ ИЗГИБНЫХ УЧАСТКОВ ТРУБ | 2019 |
|
RU2707306C1 |
| ВНУТРИТРУБНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2009 |
|
RU2418234C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ МЕТОДА МАГНИТНОГО КОНТРОЛЯ | 2017 |
|
RU2684949C1 |
| Устройство для диагностики внутренней поверхности вращающихся трубопроводов | 2024 |
|
RU2831869C1 |
Изобретение относится к области внутритрубной диагностики технологических, промысловых, магистральных трубопроводов нефтегазовой, химической отрасли и комплексов жилищно-коммунальных хозяйств. Робот содержит два несущих основания с тремя расположенными относительно друг друга под углом 120° опорными ногами, основания соединены между собой разъемным болтовым соединением. Внутри каждого несущего основания расположен привод раскрытия опорных ног, на выходном валу которого расположено ведущее зубчатое колесо, на внешней стороне каждого несущего основания установлены ведомые зубчатые колеса и опорные зубчатые колеса, при этом ведущее зубчатое колесо, ведомые зубчатые колеса и опорные зубчатые колеса входят между собой в зубчатое зацепление и образуют механическую зубчатую систему перемещения опорных ног. Внутри одного из несущих оснований расположен контроллер управления и многодиапазонный радиоприемопередатчик, соединенные между собой. На одном из несущих оснований установлена многодиапазонная радиоантенна, соединенная с многодиапазонным радиоприемопередатчиком. На каждом несущем основании смонтировано устройство визуально-инструментального контроля, корпус которого выполнен с возможностью регулировки. Обеспечивается перемещение в широком диапазоне диаметров трубопровода, сильнонаклонным и вертикальным участкам. 3 з.п. ф-лы, 3 ил.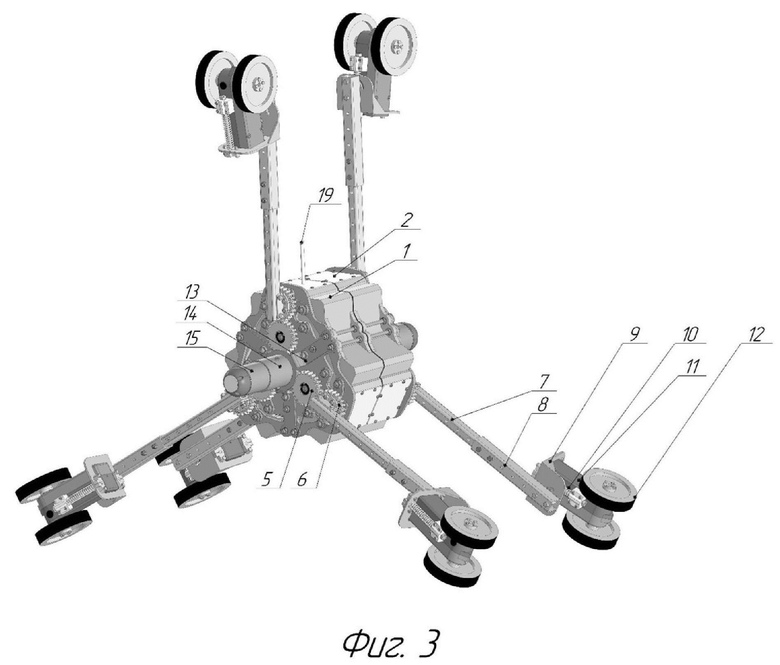
1. Автономный робот для внутритрубной диагностики, содержащий несущее основание с тремя расположенными относительно друг друга под углом 120° опорными ногами, отличающийся тем, что он содержит дополнительно второе несущее основание с тремя расположенными относительно друг друга под углом 120° опорными ногами, основания соединены между собой разъёмным болтовым соединением, внутри каждого несущего основания расположен привод раскрытия опорных ног, на выходном валу которого расположено ведущее зубчатое колесо, на внешней стороне каждого несущего основания установлены ведомые зубчатые колёса и опорные зубчатые колёса, при этом ведущее зубчатое колесо, ведомые зубчатые колёса и опорные зубчатые колёса входят между собой в зубчатое зацепление и образуют механическую зубчатую систему перемещения опорных ног, на опорных зубчатых колесах расположены опорные ноги, выполненные по типу «труба в трубе», каждая опорная нога содержит пластину, на которой установлен упругий механизм поджатия с размещенным на нем электроприводом вращения с двумя колёсами вращения, внутри одного из несущих оснований расположен контроллер управления и многодиапазонный радиоприёмопередатчик, соединённые между собой, на одном из несущих оснований установлена многодиапазонная радиоантенна, соединенная с многодиапазонным радиоприёмопередатчиком, на каждом несущем основании смонтировано устройство визуально-инструментального контроля, корпус которого выполнен с возможностью регулировки.
2. Автономный робот для внутритрубной диагностики по п.1, отличающийся тем, что устройство визуально-инструментального контроля содержит два соосных цилиндрических элемента, при этом второй цилиндрический элемент выполнен с возможностью перемещения относительно первого цилиндрического элемента.
3. Автономный робот для внутритрубной диагностики по п.1, отличающийся тем, что на каждом несущем основании установлены датчики акустического или электромагнитного контроля, или электромагнитно-акустического контроля.
4. Автономный робот для внутритрубной диагностики по п.1, отличающийся тем, что между несущими основаниями установлено третье несущее основание, соединённое с первым и вторым несущим основанием при помощи болтового соединения.
| АВТОНОМНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ДЛЯ ДИАГНОСТИКИ ТРУБОПРОВОДОВ | 2021 |
|
RU2780829C1 |
| ВНУТРИТРУБНЫЙ РОБОТ ДЛЯ ДИАГНОСТИКИ ТРУБОПРОВОДОВ | 2021 |
|
RU2773721C1 |
| RU 125543 U1, 10.03.2013 | |||
| CN 202272092 U, 13.06.2012 | |||
| US 4862808 A1, 05.09.1989 | |||
| ГОЛУБКИН И.А | |||
| и др | |||
| "Исследования и моделирование процесса проведения дефектоскопии газопроводов мобильным колесным роботом" | |||
| Вестник АГТУ | |||
| Сер: Управление, вычислительная техника и информатика | |||
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |

