Изобретение относится к способам управления внутритрубными мобильными роботами, перемещающимися с использованием собственных движителей на борту устройства, и может быть использовано в газо-, нефтепроводах, трубопроводах тепловых сетей, а также в иных трубопроводах, транспортирующих газообразные или жидкие среды.
Изобретение предназначено для диагностики трубопроводов криволинейной формы геометрии, к которым относятся отводы, повороты, изгибы с углом поворота до 180°.
Известны способы осуществления поступательного движения в трубопроводе криволинейной формы геометрии с использованием гусеничных и колёсных движителей.
Известен способ управления поступательным движением транспортного средства [RU170056, опубл.12/04/2017], который осуществляет движение в трубопроводе криволинейной формы с углом поворота до 90°. Транспортное средство содержит несущее основание с установленными на нем электродвигателем, три расположенными относительно друг друга под углом 120° одинаковые колесные пары. Недостатком способа управления данным транспортным средством является возможность потери ориентации в отводе при наличии единственного электродвигателя.
Известны способы управления поступательным движением робота в трубопроводе [RU 2780829, опубл. 04.10.2022; RU 2773721, опубл. 08.06.2022], при этом внутритрубный робот содержит два несущих основания, каждое из которых включает в себя расположенные относительно друг друга под углом 120 градусов три опорные ноги.
Данные способы позволяют осуществлять управление движением только в линейной части внутри трубопроводов.
Также известен способ управления движением роботизированного устройства для внутритрубной диагностики, содержащий два несущих основания, на каждом из которых расположены под углом 120° три опорные ноги с колесами, а опорные ноги и колеса выполнены с независимыми приводами. Перемещение роботизированного устройства осуществляется при помощи колес, имеющих omni конструкцию, как в продольном, так и в поперечном направлениях, что способствует поступательному и вращательному движению внутри трубопровода [RU 194854, опубл.25.12.2019].
К недостаткам данного способа следует отнести отсутствие возможности управления движением по криволинейному участку трубопровода.
Наиболее близким к предлагаемому изобретению и принятому за прототип является способ управления движением внутритрубного робота [J. Chen, X. Cao and Z. Deng, "Kinematic analysis of pipe robot in elbow based on virtual prototype technology," 2015 IEEE International Conference on Robotics and Biomimetics (ROBIO), Zhuhai, China, 2015, pp. 2229-22345], выполненного с несущим основанием, с каждой стороны которого установлены опорные ноги под углом 120° с колёсами, имеющими независимые управляемые приводы. Данный способ управления роботом на криволинейном участке трубопровода основан на зависимости пути ведущих колес от кривизны криволинейного участка и ориентации робота относительно оси трубы.
Однако, в основе данного способа управления лежит предположение о постоянстве ориентации робота относительно оси трубопровода, которое предположительно поддерживается достаточно высоким уровнем трения между колесами и внутренней поверхностью трубопровода, но в реальной ситуации зависит от вязкости среды и может при вращении робота привести к потере управляемости.
Недостаток прототипа - невозможность управления роботом при его движении по криволинейному участку трубопровода с неизвестным радиусом кривизны из-за отсутствия ориентации устройства относительно оси трубопровода на криволинейном участке.
Технический результат заключается в обеспечении управляемости внутритрубным роботом при его движении по криволинейному участку трубопровода с неизвестным радиусом кривизны за счет его устойчивой пространственной ориентации относительно оси трубопровода на криволинейном участке.
Технический результат достигается в результате того, что в способе управления внутритрубным роботом при его движении по криволинейному участку трубопровода, включающем размещение робота, выполненного с тремя приводными колесами на опорах, расположенными на несущем основании под углом 120 градусов и оснащенными движителями с самостоятельными приводами, во внутритрубное пространство криволинейного участка трубопровода, согласно изобретению, двум приводным колесам робота задают скорости вращения W1 и W2 , соответственно, и поддерживают их равенство W1 = W2 , размещая третье приводное колесо со скоростью вращения  в плоскости симметрии трубопровода, одновременно измеряют среднюю поступательную скорость движения робота W и угол его поворота δϕ вдоль оси трубопровода за время движения робота δt на криволинейном участке трубопровода с помощью гироскопа, предварительно размещенного в плоскости, образованной осью трубопровода и точкой креплением третьего приводного колеса, далее определяют радиус кривизны R участка трубопровода по формуле:
в плоскости симметрии трубопровода, одновременно измеряют среднюю поступательную скорость движения робота W и угол его поворота δϕ вдоль оси трубопровода за время движения робота δt на криволинейном участке трубопровода с помощью гироскопа, предварительно размещенного в плоскости, образованной осью трубопровода и точкой креплением третьего приводного колеса, далее определяют радиус кривизны R участка трубопровода по формуле:
 ,
,
и рассчитывают оптимальные скорости трех приводных колес по формулам:
 , где
, где
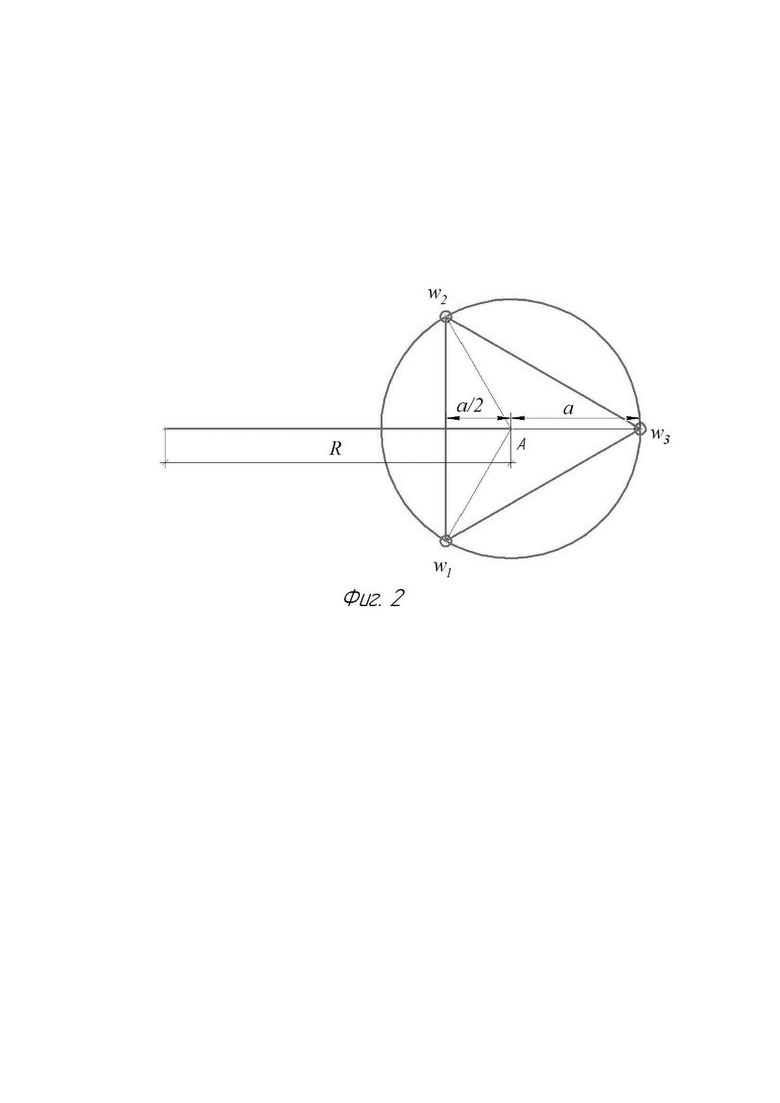
 - расстояние между осью трубопровода и приводными колесами,
- расстояние между осью трубопровода и приводными колесами,
W3 - скорость вращения третьего приводного колеса,
затем задают движителем третьему колесу оптимальную скорость W3.
Заявляемый способ управления позволяет внутритрубному роботу быстро занять устойчивую пространственную ориентацию относительно оси трубопровода, т.к. переход в такое положение обеспечивает одинаковая скорость вращения двух приводных колес  , в результате чего третье приводное колесо, имеющее скорость ,оказывается в плоскости кривизны трубопровода (плоскости симметрии). При этом оптимальные скорости приводных колес для движения по криволинейному участку без проскальзывания обеспечены предварительным расчетом радиуса кривизны R участка трубопровода путем измерения средней поступательной скорости движения робота W и угла его поворота δϕ вдоль оси трубопровода за время движения робота δt на криволинейном участке трубопровода с помощью гироскопа, предварительно размещенного в плоскости, образованной осью трубопровода и точкой креплением третьего приводного колеса.
, в результате чего третье приводное колесо, имеющее скорость ,оказывается в плоскости кривизны трубопровода (плоскости симметрии). При этом оптимальные скорости приводных колес для движения по криволинейному участку без проскальзывания обеспечены предварительным расчетом радиуса кривизны R участка трубопровода путем измерения средней поступательной скорости движения робота W и угла его поворота δϕ вдоль оси трубопровода за время движения робота δt на криволинейном участке трубопровода с помощью гироскопа, предварительно размещенного в плоскости, образованной осью трубопровода и точкой креплением третьего приводного колеса.
Изобретение проиллюстрировано следующими фигурами.
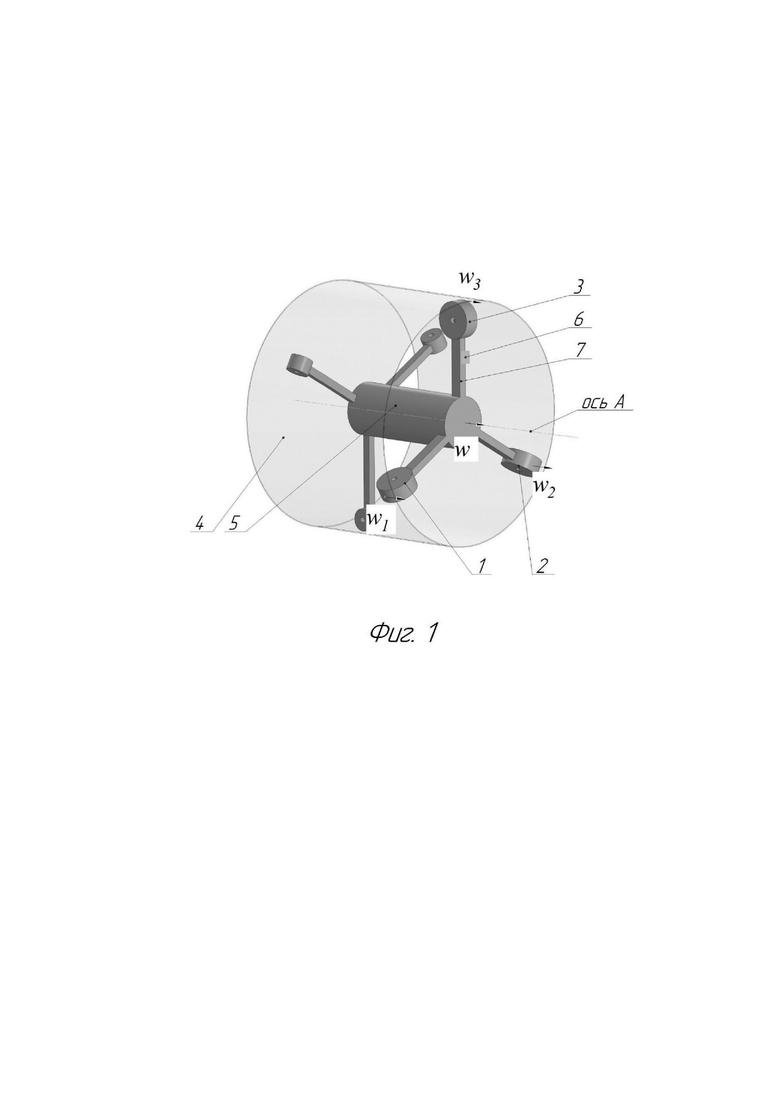
На фиг. 1 показана конструкция внутритрубного робота.
Фиг. 2 иллюстрирует устойчивую пространственную ориентацию относительно оси А трубопровода на криволинейном участке трубопровода.
На фиг. 1 и 2 показаны:
1 - первое приводное колесо (скорость W1);
2 - второе приводное колесо (скорость W2);
3 - третье приводное колесо (скорость W3);
4 - трубопровод;
5 - внутритрубный робот;
6 - гироскоп;
7 - опора приводного колеса;
R - радиус кривизны участка трубопровода;
- расстояние между осью трубопровода и приводным колесом.
Способ управления осуществляется следующим образом.
Робот 5 устанавливают во внутритрубное пространство участка трубопровода 4 с неизвестным радиусом кривизны R c малым вязким трением среды, как показано на фиг. 1 . С помощью независимых движителем с приводами (не показаны) двум приводным колесам 1 и 2 робота 5 придают скорости вращения W1 и W2, соответственно, и поддерживают постоянство равенства этих скоростей. В это время третье приводное колесо 3, имеющее скорость , оказывается в плоскости кривизны трубопровода 4 (плоскости симметрии).Одновременно осуществляют измерение средней поступательной скорости W робота 5 и угла поворота в плоскости кривизны трубопровода δϕ, за некоторое время δt движения робота 5 на криволинейном участке трубопровода 4 с помощью гироскопа 6, предварительно размещенного на опоре 7 в плоскости, образованной осью трубопровода А и точкой креплением третьего колеса 3 , рассчитывают оптимальные скорости трех приводных колес по формулам:
,
где - расстояние между осью трубопровода и приводными колесами,
затем задают движителем третьему колесу 3 оптимальную скорость W3., обеспечивая оптимальные скорости вращения приводных колес для движения по криволинейному участку без проскальзывания и устойчивую ориентацию робота 5 относительно оси А трубопровода 4.
ПРИМЕР
Робот 5 размещен внутри криволинейного участка трубопровода 4. Двум приводным колесам 1 и 2 робота с помощью движителей придают скорости вращения W1=W2= 3 м/мин, в результате чего приводное колесо 3, имеющее скорость W3 больше, чем W1 и W2, оказывается в плоскости симметрии трубопровода.
Согласно заявляемого способа за некоторое время δt движения робота по криволинейному участку была измерена его средняя поступательная скорость  м/мин , а также угол поворота в плоскости кривизны трубопровода δϕ с помощью гироскопа 6. Соотношение
м/мин , а также угол поворота в плоскости кривизны трубопровода δϕ с помощью гироскопа 6. Соотношение  мин-1. По этим данным был вычислен радиус R кривизны трубопровода:
мин-1. По этим данным был вычислен радиус R кривизны трубопровода:
 м
м
Расстояние между осью трубопровода и приводными колесами составляло 
Таким образом, скорости вращения приводных колес 1,2 составили 3,6 м/мин:
 м/мин
м/мин
Скорость вращения приводного колеса 3 была вычислена по указанной математической формуле и составила 4,8 м/мин:
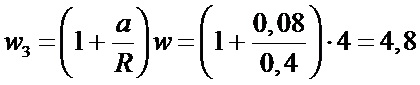 м/мин
м/мин
Устойчивая ориентация робота относительно оси А трубопровода и движение его по криволинейному участку без проскальзывания были обеспечены.
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНАЯ КОЛЕСНАЯ ОПОРА ТРАНСПОРТНОГО МОДУЛЯ ВНУТРИТРУБНОГО ДИАГНОСТИЧЕСКОГО РОБОТА | 2023 |
|
RU2821671C1 |
| ТРАНСПОРТНЫЙ МОДУЛЬ ВНУТРИТРУБНОГО ДИАГНОСТИЧЕСКОГО РОБОТА | 2022 |
|
RU2802483C1 |
| ВНУТРИТРУБНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2009 |
|
RU2418234C1 |
| СПОСОБ ОБРАБОТКИ ДЕТАЛЕЙ С КРИВОЛИНЕЙНЫМИ ПОВЕРХНОСТЯМИ | 1999 |
|
RU2169643C1 |
| НАВИГАЦИОННО-ТОПОГРАФИЧЕСКИЙ ВНУТРИТРУБНЫЙ ИНСПЕКТИРУЮЩИЙ СНАРЯД | 2007 |
|
RU2321828C1 |
| УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ РАВНОМЕРНОГО УГЛОВОГО РАСПРЕДЕЛЕНИЯ ТРЕКОВ КОРПУСКУЛЯРНОГО ИЗЛУЧЕНИЯ В ПЛЕНОЧНОМ МАТЕРИАЛЕ (ВАРИАНТЫ) | 1999 |
|
RU2149472C1 |
| УСТРОЙСТВО ДИАГНОСТИЧЕСКОГО КОМПЛЕКСА ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ТРУБОПРОВОДА И СПОСОБ ОПРЕДЕЛЕНИЯ ОТНОСИТЕЛЬНОГО ПЕРЕМЕЩЕНИЯ ТРУБОПРОВОДА ПО РЕЗУЛЬТАТАМ ДВУХ И БОЛЕЕ ИНСПЕКЦИОННЫХ ПРОПУСКОВ ДИАГНОСТИЧЕСКОГО КОМПЛЕКСА ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ТРУБОПРОВОДА | 2013 |
|
RU2558724C2 |
| Транспортная система, содержащая трубопровод и транспортное средство для перемещения внутри трубопровода | 2019 |
|
RU2714277C1 |
| ВНУТРИТРУБНЫЙ РОБОТ ДЛЯ ДИАГНОСТИКИ ТРУБОПРОВОДОВ | 2021 |
|
RU2773721C1 |
| АВТОНОМНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ДЛЯ ДИАГНОСТИКИ ТРУБОПРОВОДОВ | 2021 |
|
RU2780829C1 |
Изобретение относится к способам управления внутритрубными мобильными роботами, перемещающимися с использованием собственных движителей на борту устройства, и может быть использовано в газо-, нефтепроводах, трубопроводах тепловых сетей. В способе задают скорости вращения W1 и W2, соответственно, и поддерживают их равенство W1 = W2 , размещая третье приводное колесо со скоростью вращения W3 > W1 в плоскости симметрии трубопровода, одновременно измеряют среднюю поступательную скорость движения робота W и угол его поворота δϕ вдоль оси трубопровода за время движения робота δt на криволинейном участке трубопровода с помощью гироскопа, предварительно размещенного в плоскости, образованной осью трубопровода и точкой креплением третьего приводного колеса, далее определяют радиус кривизны R участка трубопровода и рассчитывают оптимальные скорости трех приводных колес. Технический результат заключается в обеспечении управляемости внутритрубным роботом при его движении по криволинейному участку трубопровода с неизвестным радиусом кривизны за счет его устойчивой пространственной ориентации относительно оси трубопровода на криволинейном участке. 2 ил.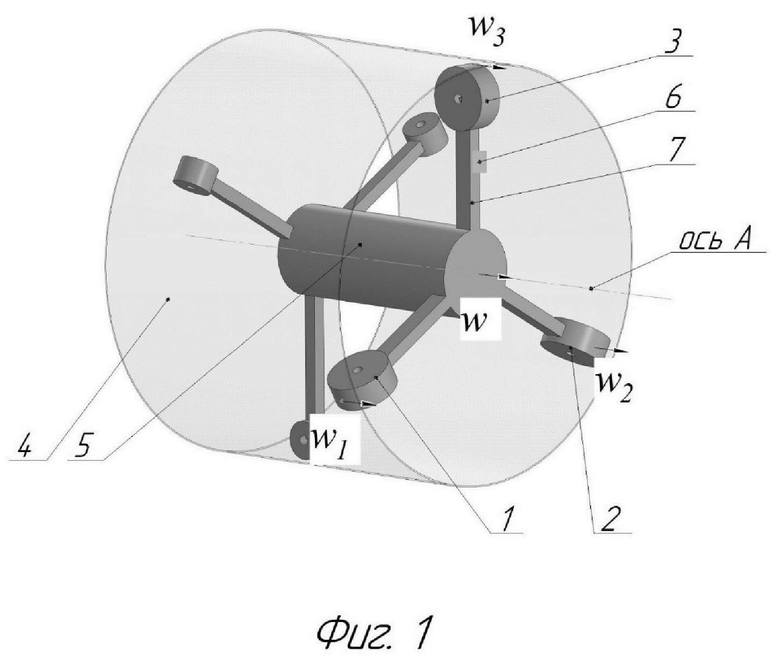
Способ управления внутритрубным роботом при его движении по криволинейному участку трубопровода, включающий размещение робота, выполненного с тремя приводными колесами на опорах, расположенными на несущем основании под углом 120 градусов и оснащенными движителями с самостоятельными приводами, во внутритрубное пространство криволинейного участка трубопровода, отличающийся тем, что двум приводным колесам робота задают скорости вращения W1 и W2, соответственно, и поддерживают их равенство W1 = W2, размещая третье приводное колесо со скоростью вращения W3 > W1 в плоскости симметрии трубопровода, одновременно измеряют среднюю поступательную скорость движения робота W и угол его поворота δϕ вдоль оси трубопровода за время движения робота δt на криволинейном участке трубопровода с помощью гироскопа, предварительно размещенного в плоскости, образованной осью трубопровода и точкой крепления третьего приводного колеса, далее определяют радиус кривизны R участка трубопровода по формуле:
 ,
,
и рассчитывают оптимальные скорости трех приводных колес по формулам:
 , где
, где
 - расстояние между осью трубопровода и приводными колесами,
- расстояние между осью трубопровода и приводными колесами,
W3 - скорость вращения третьего приводного колеса,
затем задают движителем третьему колесу оптимальную скорость W3.
| J | |||
| Chen, X | |||
| Cao and Z | |||
| Deng, "Kinematic analysis of pipe robot in elbow based on virtual prototype technology," 2015 IEEE International Conference on Robotics and Biomimetics (ROBIO), Zhuhai, China, 2015, pp | |||
| Ветряный двигатель | 1925 |
|
SU2229A1 |
| ОСЕВОЙ РЕДУКТОР ДЛЯ ЛОКОМОТИВОВ | 1967 |
|
SU225248A1 |
| 0 |
|
SU217364A1 | |
| ВЫПУСКНОЙ КЛАПАН ПОРШНЕВОГО ДЕТАНДЕРА | 0 |
|
SU194854A1 |
| АВТОНОМНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ДЛЯ ДИАГНОСТИКИ ТРУБОПРОВОДОВ | 2021 |
|
RU2780829C1 |
| ВНУТРИТРУБНЫЙ РОБОТ ДЛЯ ДИАГНОСТИКИ ТРУБОПРОВОДОВ | 2021 |
|
RU2773721C1 |

