Изобретение относится к области внутритрубной диагностике, видеоинспекции, дефектоскопии, магистральных и технологических газопроводов, нефтепроводов, трубопроводов водоснабжения и водоотведения и может найти применение при внутритрубной диагностике вертикальных, наклонных трубопроводов, трубопроводов с овализацией поперечного сечения, с наличием гофр, вмятин и выпуклостей.
Известна робототехническая система инспекции трубопровода, содержащая средство перемещения, выполненное с возможностью передвижения внутри трубопровода, установленные на средстве перемещения камеры, осветительное оборудование, приемопередающее устройство, входы которого соответственно связаны с выходами камер, первый выход приемопередающего устройства соединен со входом приводов ходовых механизмов средства перемещения, а второй выход - со входом осветительного оборудования, а также размещенные вне трубопровода передающеприемное устройство, блок управления, блок регистрации, монитор, вход-выход блока управления соединен с входом-выходом передающеприемного устройства, выход передающеприемного устройства соединен с входом монитора через блок регистрации, при этом передающе-приемное устройство и приемопередающее устройство связаны по радиоволновому каналу, отличающаяся тем, что средство перемещения выполнено в виде тележки, одна из камер, курсовая, установлена с возможностью обзора курса перемещения тележки, а другая из камер, обзорная, установлена с возможностью обозрения стенки трубы в поперечной плоскости и снабжена приводом ее поворота в плоскости, ортогональной оси трубы, вход которого соединен с третьим выходом приемопередающего устройства, вход курсовой камеры связан с четвертым выходом приемопередающего устройства, ходовые механизмы тележки снабжены энкодерами и их выход подсоединен к информационному входу приемопередающего устройства (патент РФ № 133896 от 27.10.2013).
Недостатками известного устройства является невозможность движения по вертикальным участкам, наклонным и изгибным в связи с тем, что устройство выполнено в виде тележки, которая обладает ходовыми механизмами – энкодерами, приводящие в движение четыре колеса вращения только по прямолинейной траектории.
Наиболее близким устройством того же назначения к заявленному роботу по совокупности признаков является роботизированная платформа для внутритрубной диагностики, содержащая первое и второе несущие основания, каждое из которых содержит расположенные под углом 120°
три опорные ноги с независимыми приводами с колесами с независимыми приводами, при этом первое и второе несущие основания выполнены с возможностью соединения соединительными фланцами на полноповоротном диагностическом модуле на его противоположных сторонах, а полноповоротный диагностический модуль предназначен для установки контрольно-инструментальных средств, которые выполнены с возможностью использования их в качестве сменных модулей (патент РФ № 194854, МПК F17D 5/06). Данное устройство принято за прототип.
Признаки прототипа, являющиеся общими с заявляемым техническим решением, – соединенные между собой два несущих основания, каждое из которых содержит расположенные относительно друг друга под углом 120 градусов три опорные ноги.
Недостатками известного робота являются: малый диапазон регулировки опорных ног, сложность и громоздкость самого устройства ввиду чего возможно застопоривание в изгибном участке, использование «omni-колёс» ограничивает проходимость устройства в труднодоступных участках. Не указан способ регулировки опорных ног, что может привести к неточному расположению во внутритрубном пространстве самого робота.
Задача изобретения – создание более простого робота с широким спектром технологических возможностей, способного занимать более устойчивое и точное пространственное положение, способного осуществлять свою деятельность в труднодоступных участках трубопровода: вертикальных, наклонных, изгибных, с изменением поперечного диаметра трубопровода, с наличием гофр, выпуклостей.
Поставленная задача была решена за счет того, что в известном внутритрубном роботе для диагностики трубопроводов, содержащем соединенные между собой два несущих основания, каждое из которых содержит расположенные относительно друг друга под углом 120 градусов три опорные ноги, согласно изобретению каждое несущее основание выполнено в виде замкнутого цилиндра, внутри каждого несущего основания расположены электронно-вычислительный инструмент, соединенный с источником питания, электродвигатель с валом вращения, несущие основания соединены посредством валов вращения через соединительную муфту, на каждом валу вращения установлена направляющая гайка, при этом вал вращения и направляющая гайка образуют шарико-винтовую передачу, опорная нога представляет из себя рычажный механизм, соединённый с направляющей гайкой, на конце опорной ноги установлена платформа, на которой расположены электромотор-редуктор гусеничного движителя и гусеничный движитель.
Признаки заявляемого технического решения, являющиеся отличительными от прототипа, - каждое несущее основание выполнено в виде замкнутого цилиндра; внутри каждого несущего основания расположены электронно-вычислительный инструмент, соединенный с источником питания, электродвигатель с валом вращения; несущие основания соединены посредством валов вращения через соединительную муфту; на каждом валу вращения установлена направляющая гайка; вал вращения и направляющая гайка образуют шарико-винтовую передачу; опорная нога представляет из себя рычажный механизм, соединённый с направляющей гайкой; на конце опорной ноги установлена платформа, на которой расположены электромотор-редуктор гусеничного движителя и гусеничный движитель.
Благодаря электродвигателю вращения вала внутри каждого несущего основания и шарико-винтовой передаче, образованной валом вращения и направляющей гайкой, происходит более точная и жёсткая фиксация каждой опорной ноги во внутритрубном пространстве, что представляет возможность занимать более точное и устойчивое пространственное положение, в свою очередь это позволяет роботу перемещаться по трубопроводам с переменным сечением диаметра, наличием вмятин, овализации, гофр и других дефектов, а также другие сложности.
Использование гусеничных движителей вместо колёс вращения, позволяет улучшить сцепление с внутритрубной поверхностью, а также улучшить динамические характеристики, что позволяет проходить дефекты различного рода внутри трубопровода.
Рычажный механизм опорной ноги и винтовая передача представляют возможность роботу перемещаться в широком диапазоне диаметра поперечного сечения трубопровода, а также это делает возможным перемещение в трубопроводах любой конфигурации и геометрического расположения в пространстве. Робот имеет простую конструкцию для его изготовления и применения.
Эксплуатация робота возможна в трубопроводах с наличием транспортируемой среды.
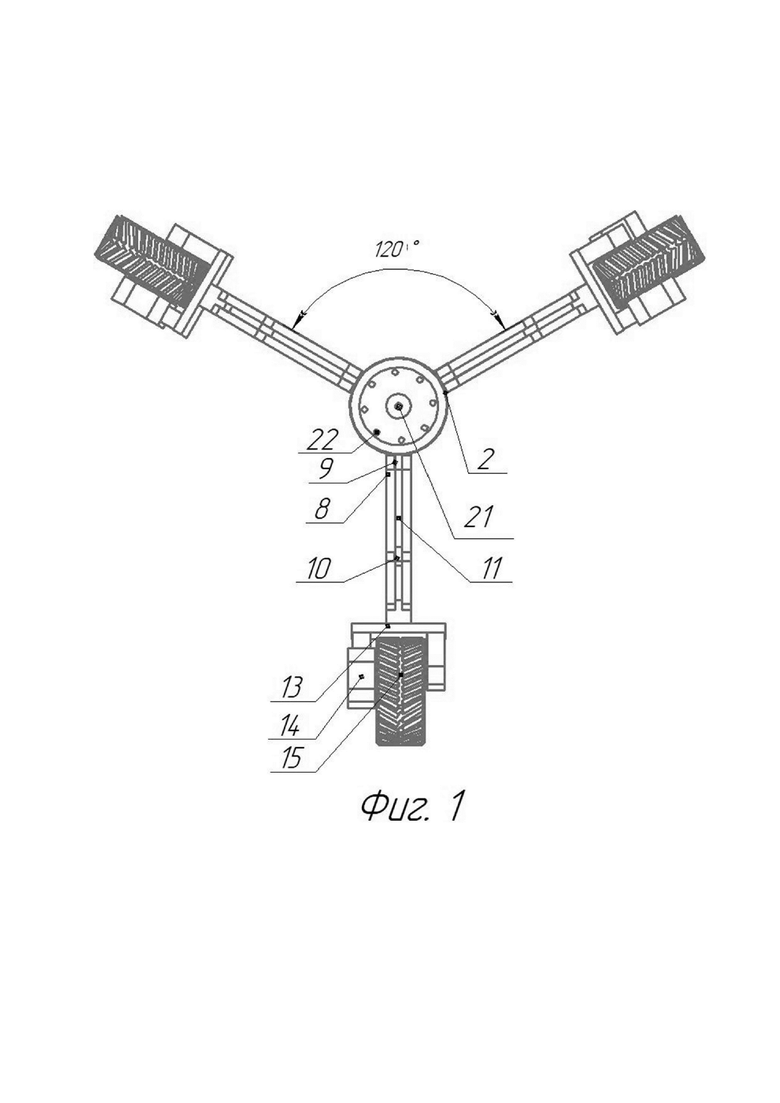
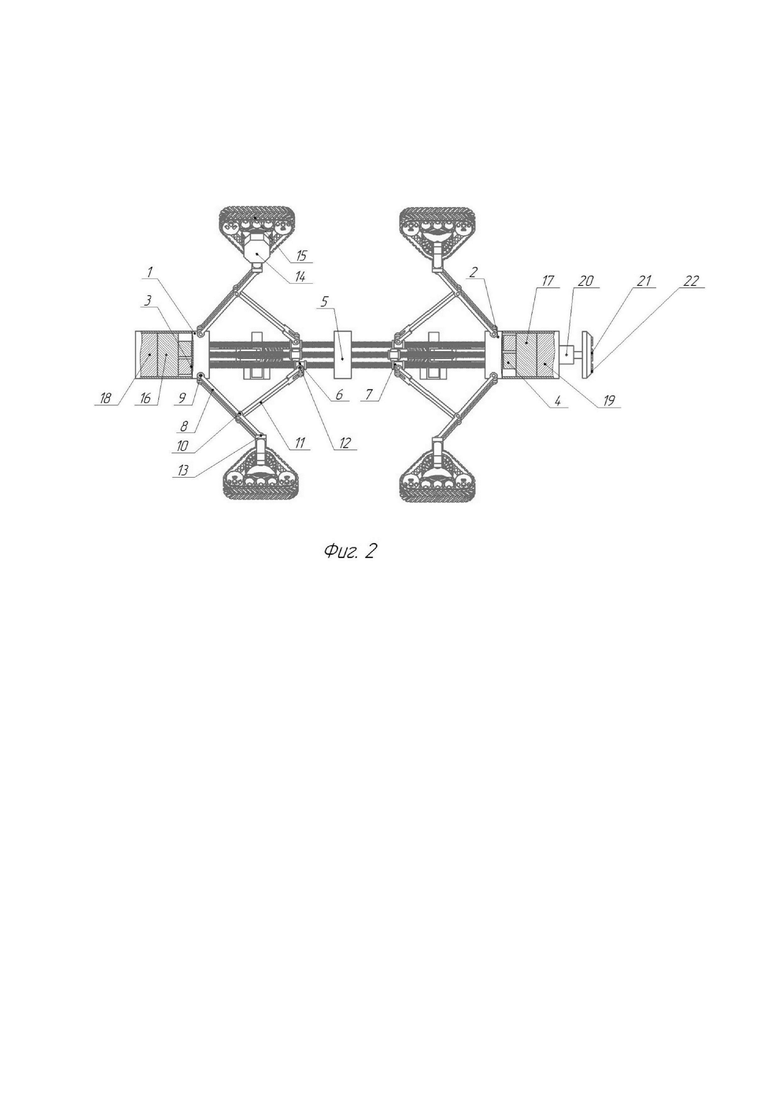
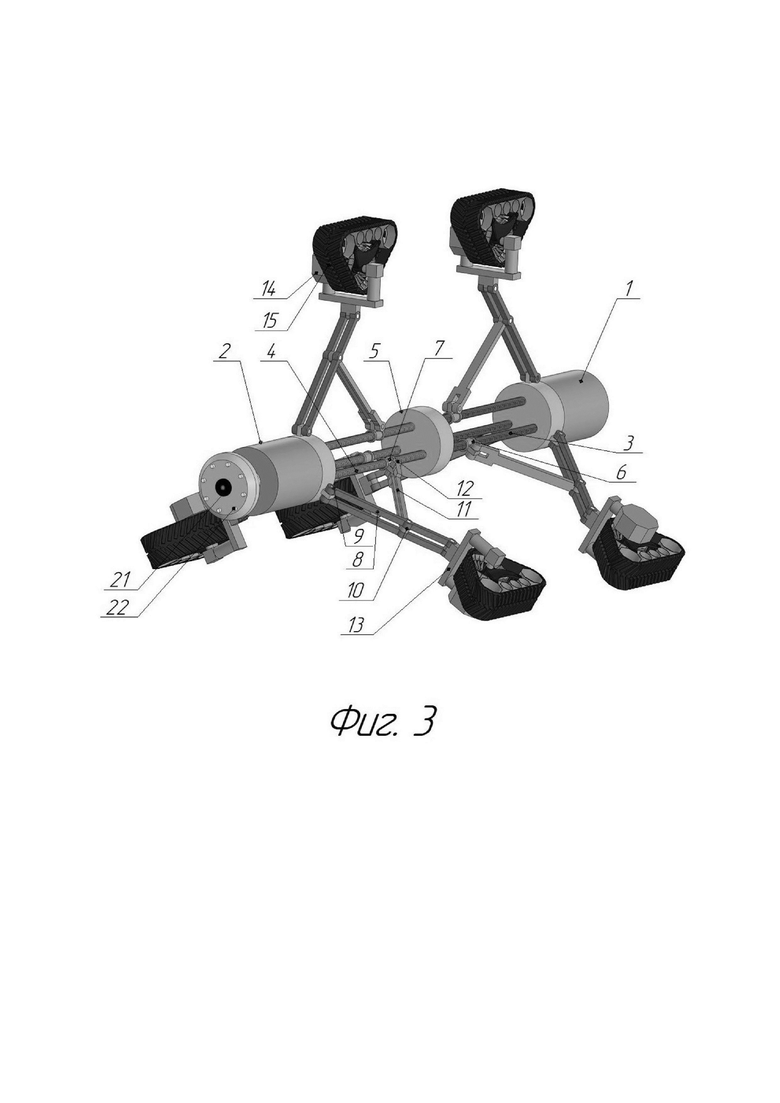
На фиг.1 представлен робот на виде спереди, на фиг.2 – робот на виде сверху, на фиг 3 - общий вид робота (3D-модель).
Внутритрубный робот для диагностики трубопроводов (фиг.2-3) содержит два несущих основания 1, 2, выполненных в виде замкнутого цилиндра. Каждое несущее основание 1, 2 содержит три опорные ноги, расположенные относительно друг друга под углом 120 градусов (фиг.1).
Внутри каждого несущего основания 1,2 расположен электродвигатель с валом вращения 3,4 соответственно.
Несущие основания 1, 2 соединены посредством валов вращения 3, 4 через соединительную муфту 5. Вал вращения 3 одним концом установлен в несущем основании 1, а другим в муфте 5. Вал вращения 4 одним концом установлен в несущем основании 2, а другим в муфте 5.
На каждом валу вращения 3, 4 установлена направляющая гайка 6, 7 соответственно. Вал вращения и направляющая гайка образуют шарико-винтовую передачу.
Опорная нога представляет из себя рычажный механизм и состоит из балки 8, которая закреплена к несущему основанию 1 при помощи шарнира 9, и тем же образом при помощи шарнира 10 соединена с тягой 11. Тяга 11 в свою очередь противоположным концом при помощи шарнира 12 соединена с направляющей гайкой 6.
На конце опорной ноги -балке 8 закреплена платформа 13, на которой установлены электромотор-редуктор гусеничного движителя 14 и гусеничный движитель 15.
Внутри каждого несущего основания 1, 2 расположен электронно-вычислительный инструмент 16, 17, соответственно соединенный с источниками питания 18, 19.
На несущем основании 2 при помощи крепления 19 установлена видеокамера 20, со световыми прожекторами 21.
Робот осуществляет свою работу следующим образом.
В исследуемый трубопровод, например, через фланцевое соединение или технологический разрез, устанавливается робот, который работает автономно при помощи электронно-вычислительного инструментов 16, 17, соединённых с источниками питания 17, 18, расположенных в несущих основаниях 1 и 2. Видеокамера 21 идентифицирует диаметр трубопровода и передаёт информацию в электронно-вычислительный инструмент 16, 17 которые координирует работу электродвигателей с валами вращения 3, 4, приводя в движение шарико-винтовую передачу, настраивая ноги робота под требуемый диаметр трубопровода (фиг. 1, 2, 3). При этом электромотор-редуктор гусеничного движителя 14 приводят в движение гусеничные движители 15, а световые прожекторы 22 позволяют освещать внутритрубное пространство и идентифицировать видеокамере 22 препятствия, дефекты, сложные участки различного рода. Акселометры и гироскоп (на чертеже не показаны), встроенные в электронно-вычислительный инструмент -16, 17 позволяют определить отклонение центра тяжести робота. На платформе 13 возможна установка датчиков ультразвуковой, электромагнитной дефектоскопии, которые могут определить толщину стенки трубопровода.
Предлагаемый робот в отличие от робота по прототипу является более динамичным, надёжным и многофункциональным в работе.
Преимущества состоят в том, что благодаря наличию рычажного механизма опорной ноги и шарико-винтовой передачи и гусеничных движителей расширяются технологические возможности робота:
- он способен занимать более устойчивое и точное пространственное положение;
- он свободно перемещается в сложно-изгибных участках трубопроводов;
- имеет возможность передвигаться в широком диапазоне изменения поперечного сечения диаметра трубопровода;
- имеет высокую проходимость на участках с физическим износом, наличием дефектом;
- имеет возможность перемещаться по трудно-доступным участкам, «подстраиваться» под каждую особенность участка трубопровода и проезжать любые дефектные места, а также резкое сужение или расширение диаметра.
С его помощью возможно осуществлять ремонт, диагностику, видеоинспекцию труб любой конфигурации.
| название | год | авторы | номер документа |
|---|---|---|---|
| РОБОТ ДЛЯ ВНУТРИТРУБНОЙ ДИАГНОСТИКИ | 2021 |
|
RU2784960C2 |
| АВТОНОМНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ДЛЯ ДИАГНОСТИКИ ТРУБОПРОВОДОВ | 2021 |
|
RU2780829C1 |
| Устройство для диагностики внутренней поверхности вращающихся трубопроводов | 2024 |
|
RU2831869C1 |
| АВТОНОМНЫЙ РОБОТ ДЛЯ ВНУТРИТРУБНОЙ ДИАГНОСТИКИ | 2022 |
|
RU2796166C1 |
| АДАПТИВНАЯ КОЛЕСНАЯ ОПОРА ТРАНСПОРТНОГО МОДУЛЯ ВНУТРИТРУБНОГО ДИАГНОСТИЧЕСКОГО РОБОТА | 2023 |
|
RU2821671C1 |
| ТРАНСПОРТНЫЙ МОДУЛЬ ВНУТРИТРУБНОГО ДИАГНОСТИЧЕСКОГО РОБОТА | 2022 |
|
RU2802483C1 |
| РОБОТ ДЛЯ ТЕХНИЧЕСКОГО КОНТРОЛЯ ТРУБОПРОВОДОВ И СЛОЖНЫХ ИЗГИБНЫХ УЧАСТКОВ ТРУБ | 2019 |
|
RU2707306C1 |
| СПОСОБ УПРАВЛЕНИЯ ВНУТРИТРУБНЫМ РОБОТОМ ПРИ ЕГО ДВИЖЕНИИ ПО КРИВОЛИНЕЙНОМУ УЧАСТКУ ТРУБОПРОВОДА | 2024 |
|
RU2835290C1 |
| ВНУТРИТРУБНЫЙ МАНИПУЛЯТОР | 1990 |
|
SU1739729A1 |
| ВНУТРИТРУБНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2009 |
|
RU2418234C1 |
Изобретение относится к области внутритрубной диагностики, видеоинспекции, дефектоскопии, магистральных и технологических газопроводов, нефтепроводов, трубопроводов водоснабжения и водоотведения и может применяться при внутритрубной диагностике вертикальных, наклонных трубопроводов, трубопроводов с овализацией поперечного сечения, с наличием гофр, вмятин и выпуклостей. Внутритрубный робот содержит два несущих основания с тремя опорными ногами, которые расположены относительно друг друга под углом 120 градусов. Каждое несущее основание выполнено в виде замкнутого цилиндра. Внутри каждого несущего основания расположены электронно-вычислительный инструмент, соединенный с источником питания, электродвигатель с валом вращения. Несущие основания соединены посредством валов вращения через соединительную муфту, на каждом валу вращения установлена направляющая гайка. При этом вал вращения и направляющая гайка образуют шарико-винтовую передачу. Каждая опорная нога представляет собой рычажный механизм, соединённый с направляющей гайкой, на конце опорной ноги установлена платформа, на которой расположены электромотор-редуктор гусеничного движителя и гусеничный движитель. Изобретение направлено на создание робота с широким спектром технологических возможностей, способного занимать устойчивое и точное пространственное положение, способного осуществлять деятельность в труднодоступных участках трубопровода. 3 ил.
Внутритрубный робот для диагностики трубопроводов, содержащий соединенные между собой два несущих основания, каждое из которых содержит расположенные относительно друг друга под углом 120 градусов три опорные ноги, отличающийся тем, что каждое несущее основание выполнено в виде замкнутого цилиндра, внутри каждого несущего основания расположены электронно-вычислительный инструмент, соединенный с источником питания, электродвигатель с валом вращения, несущие основания соединены посредством валов вращения через соединительную муфту, на каждом валу вращения установлена направляющая гайка, при этом вал вращения и направляющая гайка образуют шарико-винтовую передачу, каждая опорная нога представляет собой рычажный механизм, соединённый с направляющей гайкой, на конце опорной ноги установлена платформа, на которой расположены электромотор-редуктор гусеничного движителя и гусеничный движитель.
| ВЫПУСКНОЙ КЛАПАН ПОРШНЕВОГО ДЕТАНДЕРА | 0 |
|
SU194854A1 |
| РОБОТ ДЛЯ ТЕХНИЧЕСКОГО КОНТРОЛЯ ТРУБОПРОВОДОВ И СЛОЖНЫХ ИЗГИБНЫХ УЧАСТКОВ ТРУБ | 2019 |
|
RU2707306C1 |
| ВНУТРИТРУБНЫЙ УПРУГИЙ МИКРОРОБОТ С УПРАВЛЯЕМОЙ ПЬЕЗОАКТЮАТОРОМ ФОРМОЙ | 2018 |
|
RU2690258C1 |
| СПОСОБ ПОЛУЧЕНИЯ СИЛИКАЦИКЛОБУТАНОВЫХ ПРОИЗВОДНЫХ ДИ- или ПОЛИСИЛАЗАНОВ | 0 |
|
SU170056A1 |
| US 3539915 A1, 10.11.1970 | |||
| US 4862808 A1, 05.09.1989. | |||

