Изобретение относится к области промышленной робототехники и мехатроники, а именно к роботам для диагностики магистральных и технологических трубопроводов, предназначенных для транспортировки газообразной и жидкой фазы (нефтепроводы, газопроводы, трубопроводы водоснабжения и водоотведения). Разработка найдет широкое применение при диагностике наземных и надземных трубопроводов, которые имеют сложную пространственную геометрию: вертикальные, изгибные, наклонные трубопроводы. Также разработка позволит осуществлять диагностику трубопроводов на наличие различных механических дефектов.
Известен самоходный робот для телеинспекции трубопроводов PL 300, который представляет собой самоходное роботизированное устройство, основным элементом которого является видеокамера. Робот состоит из самоходной тележки на колёсной базе, имеющей четыре колеса вращения, которые в свою очередь снабжены электроприводами. На корпусе тележки расположена видеокамера со светодиодным освещением, которая позволяет передавать информацию на пульт управления. Робот соединён с пультом управления при помощи кабеля, который намотан катушку, располагающуюся вне трубопровода. Управление роботом осуществляется через пульт управления, с него подается сигнал роботу, где он обрабатывается и распределяется по периферийным устройствам. Движение тележки осуществляется от электрического двигателя, передающего крутящий момент колесам. Видеоизображение передается на монитор системы по кабелю при помощи видеокамеры. Самоходный робот для телеинспекции трубопроводов PL 300 широко используется в подземных трубопроводах диаметром 300-2000 мм, туннелях, контейнерах и других труднодоступных местах.
(https://portland-nk.ru/katalog/samokhodnyy-robot-dlya-teleinspekcii-t/).
Недостатками данного устройства является невозможность его движения по изгибным, вертикальным участкам, в связи с неповоротливостью колёсной тележки. Глубина просмотра внутритрубной поверхности ограничена длиной кабеля, а его наличие снижает динамические характеристики (маневренность) самого устройства и увеличивает энергозатраты на его перемещение.
Наиболее близким к предлагаемому роботу и принятым за прототип является роботизированное диагностирующее транспортное средство с трехопорной лучеобразной кинематикой, с увеличенными силой давления колес на внутреннюю поверхность трубы и коэффициентом трения. Устройство включает в себя несущее основание, с установленными на нем электродвигателем, тремя расположенными относительно друг друга под углом 120° опорными ногами с функцией движителя и колесными парами, а также систему передачи движения от электродвигателя на движитель, при этом колеса оснащены протектором. Требуемая сила давления на внутритрубную поверхность обеспечена механизмом адаптации поджатая колес к поверхности трубы. (см. Голубкин И.А., Антонов О.В. «Исследования и моделирование процесса проведения дефектоскопии газопроводов мобильным колесным роботом». ISSN 2072-9502. Вестник АГТУ. Сер: Управление, вычислительная техника и информатика. 2014. №1. Стр. 20, 21),
Недостатком прототипа являются ограниченные технологические возможности, обусловленные затрудненностью его движения в трубопроводе (малой маневренностью) и высокой вероятностью застопоривания при прохождении отводов и поворотов трубопровода ввиду разной силы поджатия колёс к внутритрубной поверхности и использования зависимого механизма поджатия каждого колеса к внутритрубной поверхности.
Признаки прототипа, являющиеся общими с заявляемым техническим решением, – несущее основание с тремя расположенными относительно друг друга под углом 120° одинаковыми опорными ногами.
Задача изобретения – создание робота с широким спектром технологических возможностей, обладающего высокой манёвренностью, точностью его установки и поддержания пространственного положения в трубопроводе, способного перемещаться по трубопроводам сложной геометрии и осуществлять свою деятельность в труднодоступных участках трубопровода.
Поставленная задача была решена за счет того, что в известном роботе, содержащем несущее основание с тремя расположенными относительно друг друга под углом 120° одинаковыми опорными ногами, установлено ещё одно несущее основание с тремя расположенными относительно друг друга под углом 120° одинаковыми опорными ногами, основания связаны между собой соединительной балкой и каждое из них содержит корпус цилиндрического типа, на котором, с одной стороны, установлена видеокамера, оптический датчик и светодиодные прожекторы, а на другой опорная манжета крепления опорных ног, а также направляющие и балка жёсткости, направляющие и балка жёсткости одним концом установлены в опорную манжету, а другим концом в опорный фланец, опорные ноги робота выполнены в виде шарнирно-рычажного механизма, каждая опорная нога имеет платформу крепления, на которую установлено колесо вращения, а также электроприводной механизм, на направляющей установлен упругий элемент, который одним концом упирается в гайку продольного перемещения, а другим в опорный фланец, при этом в каждом корпусе цилиндрического типа установлены питающий элемент, блок управления периферийными устройствами и гироскоп. В одном из корпусов дополнительно установлен блок системы анализа со специальным программным обеспечением.
На соединительной балке установлен модуль контрольно-измерительных средств. Каждое колесо вращения содержит счётчик пройденного расстояния. На каждой платформе крепления установлен дальномер.
Признаки заявляемого технического решения, являющиеся отличительными от прототипа, - робот дополнительно содержит ещё одно несущее основание с тремя расположенными относительно друг друга под углом 120° опорными ногами, основания связаны между собой соединительной балкой и каждое из них содержит корпус цилиндрического типа, на котором, с одной стороны, установлена видеокамера, оптический датчик и светодиодные прожекторы, а на другой упорная манжета крепления опорных ног, а также направляющие и балка жёсткости, причем направляющие и балка жёсткости одним концом установлены в упорную манжету, а другим концом в опорный фланец, на направляющей установлен упругий элемент, который одним концом упирается в гайку продольного перемещения, а другим в опорный фланец, опорные ноги робота выполнены в виде шарнирно-рычажного механизма, каждая из которых имеет платформу крепления, на которой установлено колесо вращения и электроприводной механизм, при этом в каждом корпусе установлены питающий элемент, блок управления периферийными устройствами и гироскоп, а в одном из корпусов дополнительно установлен блок системы анализа со специальным программным обеспечением.
Благодаря использованию шарнирно-рычажного механизма опорных ног робот обладает высокими кинематическими и динамическими характеристиками, что позволяет ему подстраиваться под внутритрубный диаметр трубопровода и проходить отводы, механические включения и неровности, перемещаться по вертикальным и наклонным участкам трубопроводов без высоких энергетических затрат (ввиду отсутствия специальных приводов для регулировки перемещения опорных ног).
Наличие двух несущих оснований позволяет роботу принимать более устойчивое положение внутри трубопровода.
Установка системы анализа, соединенной с контрольно-инструментальными средствами, позволяет обрабатывать информацию с датчиков и измерять толщину стенки трубопровода, а также прогнозировать остаточный ресурс трубопровода, строить карты напряжений, деформаций, перемещений.
Предлагаемый робот иллюстрируется чертежами, представленными на фиг.1-3. На фиг.1 представлен робот на виде спереди, на фиг.2 – робот на виде слева, на фиг 3 - общий вид робота (3D модель).
Робот содержит несущие основания 1 и 2, каждое из которых имеет корпус 3 цилиндрического типа. На корпусе 3 основания, соосно с ним, установлена опорная манжета 4, к которой прикреплены три опорные ноги. Опорная нога состоит из балки 5, которая одним концом прикреплена к несущему основанию 1,2 при помощи шарнира 6 и соединена с тягой 8 при помощи шарнира 7. Тяга 8 в свою очередь другим концом, при помощи шарнира 9, соединена с шайбой 10 продольного перемещения, соосно установленной на направляющей 11, которая одним концом установлена в опорную манжету 4 , а другим в опорный фланец 12. На направляющей 11 соосно установлен упругий элемент 13, который одним концом упирается в опорный фланец 12, а другим в шайбу 10 продольного перемещения. Между опорной манжетой 4 и опорным фланцем 12 установлена балка жёсткости 14, которая одним концом упирается в опорную манжету 4, а другим в опорный фланец 12. На балке 5 опорной ноги (на другом ее конце) расположена платформа крепления 15, на которой установлено колесо вращения 16 и электромеханический привод 17. Несущие основания 1 и 2 соединены между собой соединительной балкой 18 при помощи сферических шарниров 19. На соединительной балке 18 закреплен контрольно-измерительный модуль 20. На платформе крепления 15 и корпусе 3 оснований 1 и 2 установлены дальномеры 21. Кроме того, на корпусе 3 установлены видеокамера 22 и светодиодные прожекторы 23. В каждом корпусе цилиндрического типа расположен источник питания, соединённый с блоком управления периферийными устройствами, и гироскоп (на фиг. не показаны). Блок управления периферийными устройствами в свою очередь связан с блоком системы анализа со специальным программным обеспечением, установленным в одном из корпусов и соединенным с контрольно-инструментальными модулем 20. Система анализа позволяет измерять толщину стенки трубопровода и прогнозировать остаточный ресурс трубопровода, строить карты напряжений, деформаций, перемещений.
Наличие в конструкции робота упругого элемента 13, направляющей 11 и особая конструкция опорной ноги робота позволяют ему беспрепятственно перемещаться по трубопроводам с переменным сечением диаметра с наличием вмятин, овализации, гофр и других дефектов, преодолевать T-образные участки, а также другие сложности. Предлагаемый механизм опорной ноги позволяет перемещаться роботу в широком диапазоне диаметров поперечного сечения трубопровода, а также делает возможным его перемещение в трубопроводах сложной конфигурации.
Робот осуществляет свою работу следующим образом.
Робот устанавливают в исследуемый трубопроводов, например, через фланцевое соединение. С поста управления роботу отправляют сигнал. Робот работает автономно при помощи блока управления и системы анализа, соединённых с источником питания (на фиг. не показаны), расположенных в корпусе 3 робота. Дальномеры 21 и видеокамера 22 при помощи светодиодных прожекторов 23 идентифицируют препятствия, дефекты трубопроводов, сложные участки. Информация о состоянии трубопроводов с дальномеров 21 и видеокамеры 22 поступает в блок управления, который определяет маршрут по внутритрубной поверхности и управляет электромеханическими приводами 17, которые приводят в движение колёса вращения 16. В зависимости от поперечного сечения трубопровода опорные ноги, за счет наличия упругого элемента 13, подстраиваются таким образом, что робот беспрепятственно перемещается по внутритрубной поверхности. Упругий элемента 13 при изменении поперечного сечения трубопровода толкает шайбу 10 продольного перемещения, которая регулирует вылет опорной ноги. Сферические шарниры 19 дают возможность несущим основаниям 1 и 2 вращаться относительно оси соединительной балки 18. Наличие двух несущих оснований 1 и 2, их вращение относительно оси соединительной балки 18 обеспечивают устойчивость робота внутри трубопровода, его маневренность и позволяют беспрепятственно перемещаться по отводам, тройникам, вертикальным участкам. Контрольно-измерительный модуль 20 измеряет толщину стенки трубопровода и обнаруживает дефекты различного рода, которые отражаются в постоянном запоминающем устройстве модуля. Гироскопы определяют отклонение центра тяжести каждого несущего основания робота.
Предлагаемый робот в отличие от робота по прототипу является более надёжным, динамичным, технологичнее в работе. Робот имеет возможность перемещаться по трубопроводам сложной геометрии.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВНУТРИТРУБНЫЙ РОБОТ ДЛЯ ДИАГНОСТИКИ ТРУБОПРОВОДОВ | 2021 |
|
RU2773721C1 |
| РОБОТ ДЛЯ ВНУТРИТРУБНОЙ ДИАГНОСТИКИ | 2021 |
|
RU2784960C2 |
| АВТОНОМНЫЙ РОБОТ ДЛЯ ВНУТРИТРУБНОЙ ДИАГНОСТИКИ | 2022 |
|
RU2796166C1 |
| РОБОТ ДЛЯ ТЕХНИЧЕСКОГО КОНТРОЛЯ ТРУБОПРОВОДОВ И СЛОЖНЫХ ИЗГИБНЫХ УЧАСТКОВ ТРУБ | 2019 |
|
RU2707306C1 |
| СПОСОБ УПРАВЛЕНИЯ ВНУТРИТРУБНЫМ РОБОТОМ ПРИ ЕГО ДВИЖЕНИИ ПО КРИВОЛИНЕЙНОМУ УЧАСТКУ ТРУБОПРОВОДА | 2024 |
|
RU2835290C1 |
| УСТРОЙСТВО ДЛЯ МОНИТОРИНГА СИСТЕМ ЭЛЕКТРИЧЕСКОГО ОБОГРЕВА ТРУБОПРОВОДОВ | 2021 |
|
RU2766373C1 |
| АДАПТИВНАЯ КОЛЕСНАЯ ОПОРА ТРАНСПОРТНОГО МОДУЛЯ ВНУТРИТРУБНОГО ДИАГНОСТИЧЕСКОГО РОБОТА | 2023 |
|
RU2821671C1 |
| САМОХОДНЫЙ РОБОТ ДЛЯ ДИАГНОСТИКИ МЕТАЛЛОКОНСТРУКЦИЙ | 2024 |
|
RU2821403C1 |
| ТРАНСПОРТНЫЙ МОДУЛЬ ВНУТРИТРУБНОГО ДИАГНОСТИЧЕСКОГО РОБОТА | 2022 |
|
RU2802483C1 |
| МОБИЛЬНАЯ АВТОНОМНАЯ РОБОТОТЕХНИЧЕСКАЯ ПЛАТФОРМА С БЛОЧНОЙ ИЗМЕНЯЕМОЙ СТРУКТУРОЙ | 2019 |
|
RU2704048C1 |



Изобретение относится к области промышленной робототехники и мехатроники, а именно к роботам для диагностики магистральных и технологических трубопроводов, предназначенных для транспортировки газообразной и жидкой фазы, и может применяться при диагностике наземных и надземных трубопроводов, которые имеют сложную пространственную геометрию, а также трубопроводов с наличием различных механических дефектов. Автономный робототехнический комплекс имеет широкий спектр технологических возможностей, обладает высокой манёвренностью, точностью установки и поддержания его пространственного положения в трубопроводе, способен перемещаться по трубопроводам сложной геометрии и осуществлять свою деятельность в труднодоступных участках трубопровода. 3 з.п. ф-лы, 3 ил.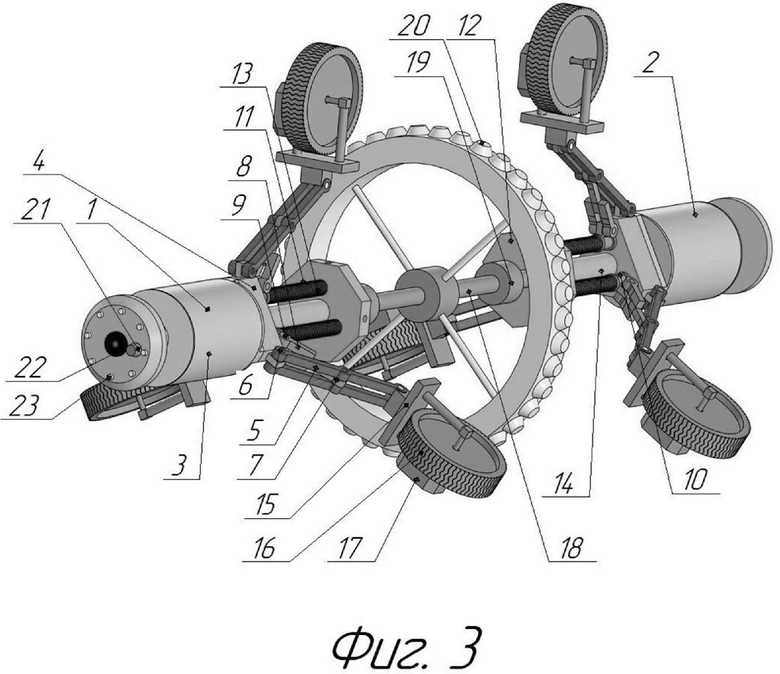
1. Автономный робототехнический комплекс для диагностики трубопроводов, содержащий несущее основание с тремя расположенными относительно друг друга под углом 120° опорными ногами, отличающийся тем, что он дополнительно содержит ещё одно несущее основание с тремя расположенными относительно друг друга под углом 120° опорными ногами, основания связаны между собой соединительной балкой и каждое из них содержит корпус цилиндрического типа, на котором с одной стороны установлена видеокамера, оптический датчик и светодиодные прожекторы, а на другой – упорная манжета крепления опорных ног, а также направляющие и балка жёсткости, причем направляющие и балка жёсткости одним концом установлены в упорную манжету, а другим концом – в опорный фланец, на направляющей установлен упругий элемент, который одним концом упирается в гайку продольного перемещения, а другим – в опорный фланец, опорные ноги выполнены в виде шарнирно-рычажного механизма, каждая из которых имеет платформу крепления, на которой установлено колесо вращения и электроприводной механизм, при этом в каждом корпусе цилиндрического типа установлены питающий элемент, блок управления периферийными устройствами и гироскоп, а в одном из корпусов дополнительно установлен блок системы анализа с программным обеспечением.
2. Автономный робототехнический комплекс для диагностики трубопроводов по п.1, отличающийся тем, что на соединительной балке установлен модуль контрольно-измерительных средств.
3. Автономный робототехнический комплекс для диагностики трубопроводов по п.1, отличающийся тем, что каждое колесо вращения содержит счётчик пройденного расстояния.
4. Автономный робототехнический комплекс для диагностики трубопроводов по п.1, отличающийся тем, что на каждой платформе крепления установлен дальномер.
| ВЫПУСКНОЙ КЛАПАН ПОРШНЕВОГО ДЕТАНДЕРА | 0 |
|
SU194854A1 |
| РОБОТ ДЛЯ ТЕХНИЧЕСКОГО КОНТРОЛЯ ТРУБОПРОВОДОВ И СЛОЖНЫХ ИЗГИБНЫХ УЧАСТКОВ ТРУБ | 2019 |
|
RU2707306C1 |
| ВНУТРИТРУБНЫЙ УПРУГИЙ МИКРОРОБОТ С УПРАВЛЯЕМОЙ ПЬЕЗОАКТЮАТОРОМ ФОРМОЙ | 2018 |
|
RU2690258C1 |
| СПОСОБ ПОЛУЧЕНИЯ СИЛИКАЦИКЛОБУТАНОВЫХ ПРОИЗВОДНЫХ ДИ- или ПОЛИСИЛАЗАНОВ | 0 |
|
SU170056A1 |
| US 3539915 A1, 10.11.1970 | |||
| US 4862808 A1, 05.09.1989. | |||

