Область техники
Настоящее изобретение относится к промышленному
транспортному средству и способу управления промышленным транспортным средством.
Уровень техники
В публикации выложенной заявки на патент Японии №2006-316942 раскрыто промышленное транспортное средство, которое движется за счет передачи движущей силы двигателя на ведущие колеса через устройство передачи движущей силы, соединенное с двигателем. Когда водитель выходит из транспортного средства, так что сигнал посадки переключателя обнаружения посадки отключается, контроллер промышленного транспортного средства прекращает подачу питания на соленоидный клапан переднего хода или электромагнитный клапан заднего хода по истечении заданного времени задержки. Когда водитель снова садится, контроллер перезапускает питание электромагнитного клапана прямого или обратного хода, если сигнал посадки переключателя обнаружения посадки включен, а сигнал переднего хода или сигнал заднего хода переключателя команд переднего/обратного хода включается после того, как контроллер определяет то, что направление действия рычага управления вперед/назад является нейтральным.
Водитель промышленного транспортного средства может временно привстать, например, для проверки окружающей обстановки во время движения. Однако в вышеописанной конфигурации, когда состояние без посадки продолжается до тех пор, пока не истечет время задержки, передача движущей силы прерывается. Такое прерывание передачи движущей силы изменяет эксплуатационные ощущения промышленного транспортного средства во время вождения. По мере того, как увеличивается изменение эксплуатационных ощущений, комфорт вождения для водителя может значительно снижаться.
Сущность изобретения
Это краткое описание сущности заявленного изобретения предоставлено для ознакомления с набором концепций в упрощенной форме, которые дополнительно будут описаны далее в подробном описании изобретения. Настоящее краткое описание сущности изобретения не предназначено для определения ключевых признаков или существенных признаков заявленного объекта, а также не предназначено для использования в качестве помощи в определении объема заявленного объекта.
В общем аспекте предлагается транспортное средство промышленного назначения, которое включает в себя двигатель, ведущее колесо, механизм передачи движущей силы, выполненный с возможностью передачи движущей силы двигателя на ведущее колесо, сиденье водителя, на котором сидит водитель, блок обнаружения водителя и контроллер. Блок обнаружения водителя выполнен с возможностью определения состояния водителя из состояний водителя, включающих состояние отсутствия, в котором водитель покидает сиденье водителя, и состояние присутствия, в котором водитель сидит на сиденье водителя. Контроллер выполнен с возможностью установки режима работы из режимов работы на основе состояния водителя, обнаруженного блоком обнаружения водителя. Режимы работы включают в себя нормальный режим, режим ограничения, который ограничивает движущую силу, и режим прерывания, который прерывает передачу движущей силы на ведущее колесо механизмом передачи движущей силы. Контроллер включает в себя блок определения состояния отсутствия, блок установки ограничения и блок установки прерывания. Блок определения состояния отсутствия выполнен с возможностью определения, когда состоянием водителя является неактивное состояние, является ли продолжительность состояния отсутствия, в течение которого продолжается неактивное состояние, меньшей или равной заданному времени определения состояния отсутствия. Блок установки ограничения выполнен с возможностью установки режима работы в режим ограничения, когда блок определения состояния отсутствия определяет, что продолжительность состояния отсутствия меньше или равна времени определения состояния отсутствия. Блок задания прерывания выполнен с возможностью установки режима работы в режим прерывания, когда блок определения состояния отсутствия определяет, что продолжительность состояния отсутствия превышает время определения состояния отсутствия.
Другие отличительные признаки и аспекты будут очевидны из следующего далее подробного описания, чертежей и формулы изобретения.
Краткое описание чертежей
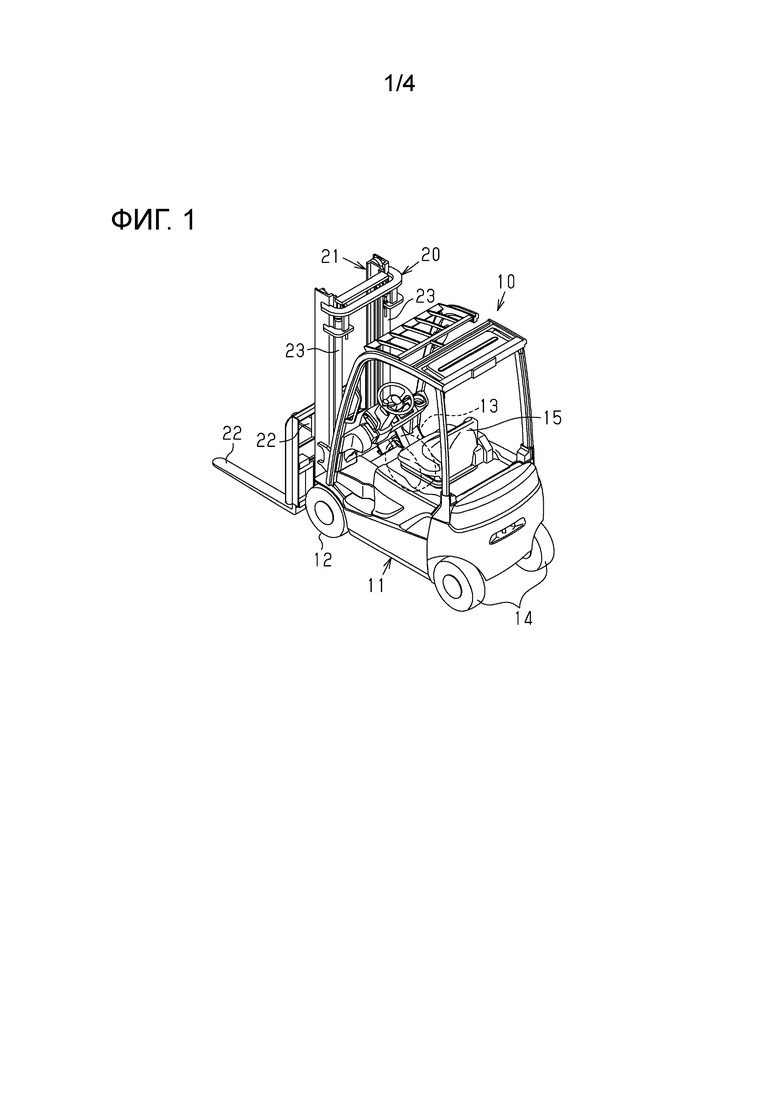
Фиг. 1 - вид в перспективе всего промышленного транспортного средства согласно первому варианту осуществления;
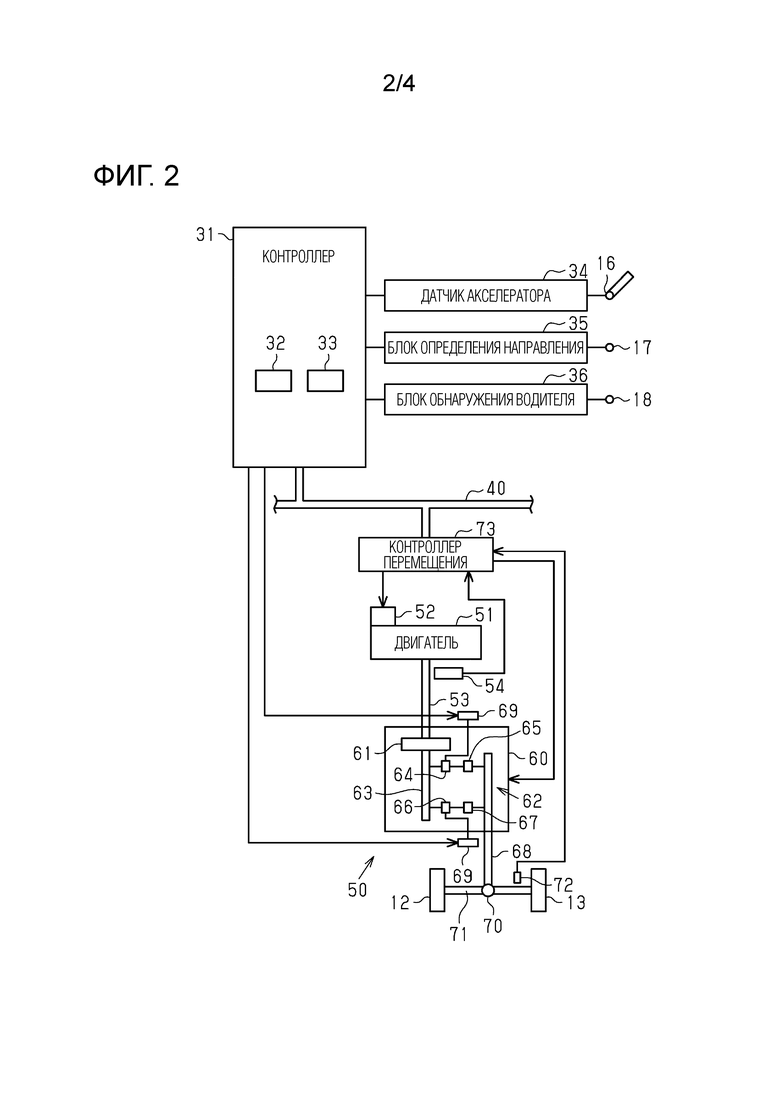
Фиг. 2 - схема, показывающая конфигурацию системы промышленного транспортного средства согласно первому варианту осуществления;
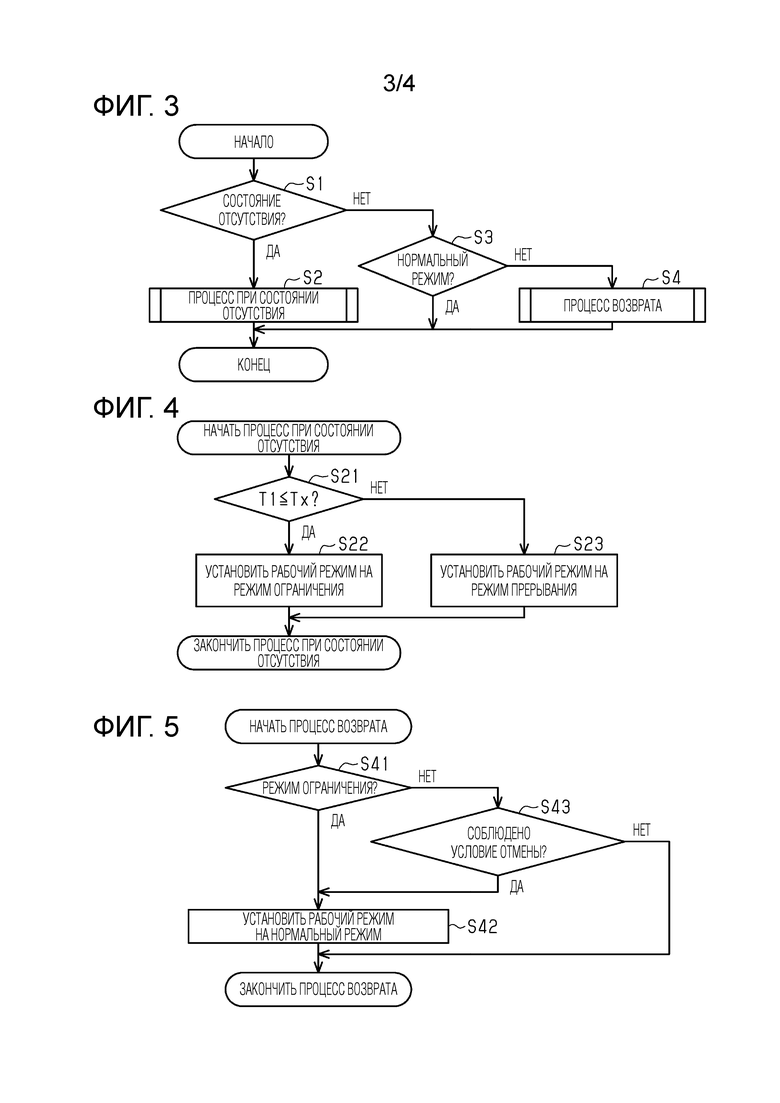
Фиг. 3 - блок-схема, показывающая процесс управления перемещением согласно первому варианту осуществления;
Фиг. 4 - блок-схема, показывающая процесс при состоянии отсутствия согласно первому варианту осуществления;
Фиг. 5 - блок-схема, показывающая процесс возврата согласно первому варианту осуществления; и
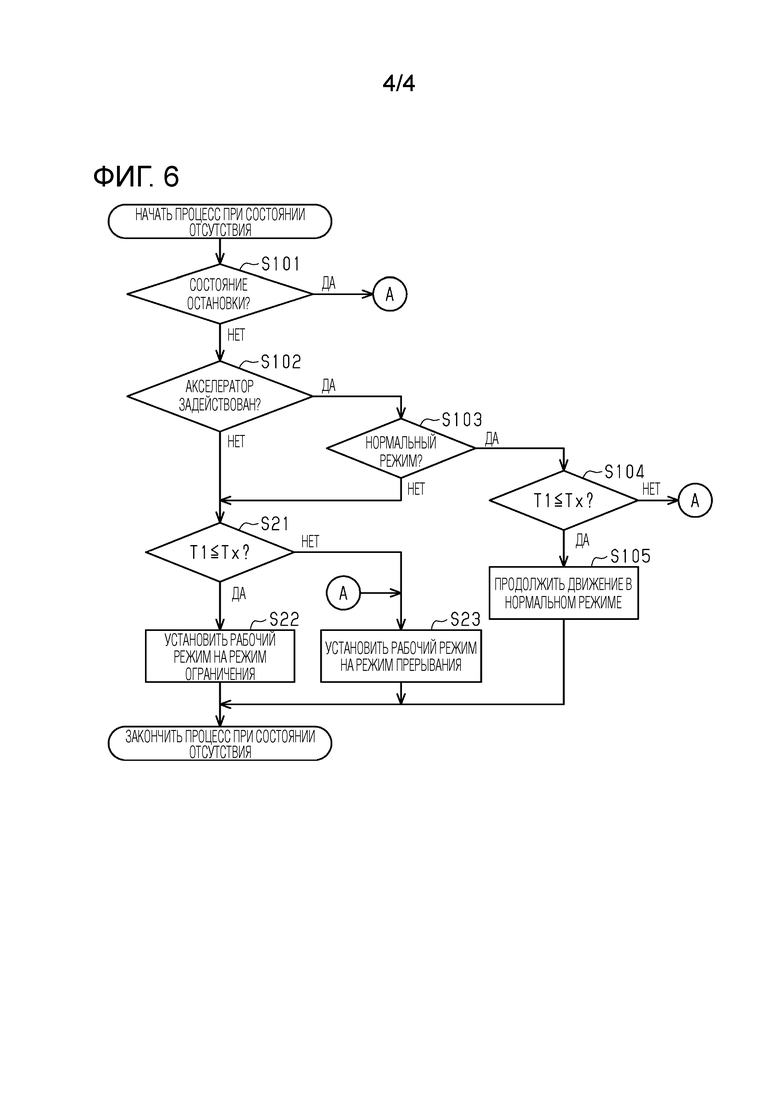
Фиг. 6 - блок-схема, показывающая процесс при состоянии отсутствия согласно второму варианту осуществления.
На всех чертежах и в подробном описании одними и теми же ссылочными позициями обозначены одни и те же элементы. Чертежи могут быть не в масштабе, а относительный размер, пропорции и изображение элементов на чертежах могут быть увеличены для ясности, иллюстрации и удобства.
Подробное описание изобретения
Это описание обеспечивает всестороннее понимание описанных способов, устройств и/или систем. Модификации и эквиваленты описанных способов, устройств и/или систем очевидны для специалиста в данной области техники. Последовательности операций приведены в качестве примера и могут быть изменены для специалиста в данной области, за исключением операций, которые обязательно выполняются в определенном порядке. Описания функций и конструкций, которые хорошо известны специалистам в данной области техники, могут быть опущены.
Типичные варианты осуществления могут иметь различные формы и не ограничиваются описанными примерами. Однако, описанные примеры являются подробными и полными и раскрывают весь объем раскрытия для специалиста в данной области техники.
В данном описании «по меньшей мере один из А и В» следует понимать как означающий «только А, только В или как А, так и В».
Первый вариант осуществления изобретения
Теперь будет описано промышленное транспортное средство 10 согласно первому варианту его осуществления.
Промышленное транспортное средство 10
Как показано на фиг. 1, промышленное транспортное средство 10 включает в себя кузов 11, два ведущих колеса 12, 13, два управляемых колеса 14, сиденье 15 водителя и погрузочно-разгрузочное устройство 20. Промышленное транспортное средство 10 согласно настоящему варианту осуществления изобретения представляет собой вилочный погрузчик с противовесом.
Ведущие колеса 12, 13
Ведущие колеса 12, 13 расположены в передней нижней части кузова 11 транспортного средства. Два ведущих колеса 12, 13 отделены друг от друга по ширине транспортного средства.
Управляемые колеса 14
Два управляемых колеса 14 расположены в задней нижней части кузова 11 транспортного средства. Два управляемых колеса 14 отделены друг от друга в направлении ширины транспортного средства.
Сиденье 15 водителя
Сиденье 15 водителя представляет собой сиденье, на котором сидит водитель. Сиденье 15 водителя расположено в верхней части кузова 11 транспортного средства.
Погрузочно-разгрузочное устройство 20
Погрузочно-разгрузочное устройство 20 включает в себя мачту 21, две вилы 22 и подъемные цилиндры 23. Мачта 21 расположена перед кузовом 11 транспортного средства. Вилы 22 поднимаются и опускаются вместе с мачтой 21. На вилах 22 установлен груз. Подъемные цилиндры 23 включают в себя гидравлические цилиндры. Подъемные цилиндры 23 выдвигаются или втягиваются для подъема или опускания мачты 21. Вилы 22 поднимаются или опускаются при подъеме или опускании мачты 21. Промышленное транспортное средство 10 согласно настоящему варианту осуществления выполняет операцию передвижения и операцию по обработке груза, когда им управляет водитель.
Как показано на фиг. 2, промышленное транспортное средство 10 включает в себя контроллер 31, акселератор 16, датчик 34 акселератора, блок 17 подачи команды направления, блок 35 определения направления, переключатель 18 сиденья, блок 36 обнаружения водителя, систему 50 перемещения и шину 40.
контроллер 31, процессор 32 и память 33
Контроллер 31 включает в себя процессор 32 и память 33. Процессор 32 может включать в себя, например, центральный процессор (CPU/ЦП), графический процессор (GPU) или процессор цифровых сигналов (DSP). Память 33 включает в себя оперативную память (ОЗУ) и постоянную память (ПЗУ). В памяти 33 хранятся программы для работы промышленного транспортного средства 10. Память 33 хранит программные коды или команды, сконфигурированные так, чтобы заставить процессор 32 выполнять процессы. Память 33, которая является машиночитаемым носителем, включает в себя любой тип носителя, который доступен для компьютера общего назначения или специального компьютера. Контроллер 31 может включать в себя аппаратную схему, такую как специализированная интегральная схема (ASIC) и программируемая пользователем вентильная матрица (FPGA). Контроллер 31, который представляет собой схему обработки, может включать в себя один или более процессоров, которые работают в соответствии с компьютерной программой, одну или более аппаратных схем, таких как ASIC и FPGA, или их комбинацию.
Акселератор 16
Акселератор 16 приводится в действие водителем при ускорении кузова 11 транспортного средства. Акселератор 16 дает команду контроллеру 31 ускорить промышленное транспортное средство 10 в ответ на действие водителя. Акселератор 16 представляет собой, например, педаль акселератора. Акселератор 16 может иметь любую конкретную конфигурацию и может представлять собой переключатель, рычаг, сенсорную панель и т.п.
Датчик 34 акселератора
Датчик 34 акселератора определяет величину нажатия акселератора, которая представляет собой величину срабатывания акселератора 16. Датчик 34 акселератора выдает электрический сигнал, соответствующий степени нажатия на акселератор, на контроллер 31. Контроллер 31 получает величину, приводимую в действие акселератором, на основе электрического сигнала от датчика 34 акселератора.
Блок 17 подачи команды направления
Блок 17 подачи команды направления используется для подачи команды направления движения кузова 11 транспортного средства в соответствии с управляемым направлением. Направление движения кузова 11 транспортного средства считается направлением движения промышленного транспортного средства 10. В частности, блок 17 подачи команды направления представляет собой рычаг направления. Управляемое направление включает в себя направление, задающее движение вперед, и направление, задающее движение назад. Блок 17 подачи команды направления выполнен с возможностью работы в направлении, дающем указание на движение вперед, или направлении, дающем указание на движение назад, относительно нейтрального положения. Конкретная конфигурация блока 17 подачи команды направления не ограничивается рычагом направления, а может быть переключателем, сенсорной панелью и т.п.
Блок 35 определения направления
Блок 35 определения направления определяет направление срабатывания блока 17 подачи команды направления. Блок 35 определения направления также упоминается как датчик направления. Блок 35 определения направления определяет, работает ли блок 17 подачи команды направления в направлении, задающем движение вперед, или в направлении, задающем движение назад, относительно нейтрального положения блока 17 выдачи команды направления. Блок 35 определения направления выдает электрический сигнал, соответствующий рабочему направлению блока 17 подачи команды направления, на контроллер 31. Контроллер 31 получает заданное направление блока 17 подачи команды направления на основе электрического сигнала от блока 35 определения направления. Контроллер 31 распознает, дал ли водитель команду на движение вперед, дал ли водитель команду на движение назад или водитель не дал ни того, ни другого.
Переключатель 18 сиденья
Переключатель 18 сиденья представляет собой механизм, который включается, когда водитель сидит на сиденье 15 водителя. Переключатель 18 сиденья предусмотрен, например, под сиденьем 15 водителя. Конкретная конфигурация переключателя 18 сиденья не ограничивается переключателем, а может быть датчиком, чувствительным к давлению, датчиком веса, оптическим датчиком, камерой и т.п.
Блок 36 обнаружения водителя
Блок 36 обнаружения водителя представляет собой электронный блок управления, который определяет состояние водителя. Состояние водителя включает в себя состояние отсутствия и состояние присутствия. В состоянии отсутствия водитель не сидит на сиденье 15 водителя. В состоянии присутствия водитель сидит на сиденье 15 водителя. Состояние водителя определяется на основе результата обнаружения переключателя 18 сиденья. Например, когда переключатель 18 сиденья включен, блок 36 обнаружения водителя определяет, что состоянием водителя является состоянием присутствия. Когда переключатель 18 сиденья находится в положении ВЫКЛ, блок 36 обнаружения водителя определяет, что состояние водителя является состоянием отсутствия.
Способ определения состояния водителя не ограничивается вышеописанным способом, а может быть любым подходящим способом. Например, когда в качестве механизма, соответствующего переключателю 18 сиденья, используется датчик веса, блок 36 обнаружения водителя определяет, что состояние водителя является состоянием присутствия, если вес, определяемый датчиком веса, больше или равен заданному значению, и определяет, что состояние водителя является состоянием отсутствия, если вес, определяемый датчиком веса, меньше заданного значения. Когда в качестве механизма, соответствующего переключателю 18 сиденья, используется камера, блок 36 обнаружения водителя может извлекать указанную количественную характеристику из изображения, захваченного камерой, и определять состояние водителя на основе количественной характеристики. Примеры количественного признака включают в себя позиционное соотношение между водителем и сиденьем 15 водителя на изображении, позу водителя и т.п.
Система 50 перемещения
Система 50 перемещения обеспечивает перемещение кузова 11 транспортного средства. Система 50 перемещения включает в себя двигатель 51, выходной вал 53, датчик 54 скорости вращения, механизм 60 передачи движущей силы, дифференциал 70, ось 71, датчик 72 скорости транспортного средства и контроллер 73 перемещения. Промышленное транспортное средство 10 представляет собой транспортное средство с двигателем.
Двигатель 51
Двигатель 51 является источником привода для движения и погрузочно-разгрузочных операций промышленного транспортного средства 10. Двигатель 51 согласно настоящему варианту осуществления представляет собой бензиновый двигатель, в котором в качестве топлива используется бензин. Двигатель 51 включает в себя привод 52 дроссельной заслонки. Топливо двигателя 51 не ограничивается бензином и может быть, например, сжиженным нефтяным газом (LPG) или компримированным природным газом (CNG). Двигатель 51 не ограничивается бензиновым двигателем и может быть, например, дизельным двигателем.
Привод 52 дроссельной заслонки
Привод 52 дроссельной заслонки регулирует степень открытия дроссельной заслонки. Привод 52 дроссельной заслонки регулирует степень открытия дроссельной заслонки, чтобы регулировать количество воздуха, подаваемого в двигатель 51. Соответственно, регулируется скорость вращения двигателя 51.
Выходной вал 53
Выходной вал 53 соединен с двигателем 51. Выходной вал 53 вращается под действием двигателя 51.
Датчик 54 скорости вращения
Датчик 54 скорости вращения (частоты вращения) установлен на выходном валу 53. Датчик 54 скорости вращения определяет скорость вращения (частоту вращения) двигателя 51. Скорость вращения двигателя 51 также является скоростью вращения выходного вала 53. Датчик 54 скорости вращения выдает электрический сигнал, соответствующий скорости вращения выходного вала 53, на контроллер 73 перемещения.
Механизм 60 передачи движущей силы
Механизм 60 передачи движущей силы передает движущую силу двигателя 51 на ведущие колеса 12, 13. Механизм 60 передачи движущей силы включает в себя преобразователь 61 крутящего момента, трансмиссию 62 и два электромагнитных клапана 69.
Преобразователь 61 крутящего момента
Преобразователь 61 крутящего момента соединен с выходным валом 53. Движущая сила двигателя 51 передается на гидротрансформатор 61 через выходной вал 53. Преобразователь 61 крутящего момента включает в себя насос и турбину, соединенные с выходным валом 53. В гидротрансформаторе 61 турбина вращается за счет гидравлического масла, выходящего из насоса.
Трансмиссия 62
Трансмиссия 62 включает в себя первичный вал 63, муфту 64 переднего хода, зубчатую передачу 65 переднего хода, муфту 66 заднего хода, зубчатую передачу 67 заднего хода и выходной вал 68.
Входной вал 63
Входной вал 63 соединен с гидротрансформатором 61. Движущая сила передается от гидротрансформатора 61 к трансмиссии 62 через первичный вал 63.
Муфта 64 переднего хода и зубчатая передача 65 переднего хода
Муфта 64 переднего хода установлена на входном валу 63. Зубчатая передача 65 переднего хода расположена между муфтой 64 переднего хода и выходным валом 68. Муфта 64 переднего хода переключается между включенным состоянием и выключенным состоянием. Зацепленное состояние представляет собой состояние, в котором входной вал 63 и передняя зубчатая передача 65 соединены друг с другом. Незацепленное состояние представляет собой состояние, в котором входной вал 63 и передняя зубчатая передача 65 отсоединены друг от друга. Когда муфта 64 переднего хода соединяет первичный вал 63 и зубчатую передачу 65 переднего хода друг с другом, движущая сила передается от входного вала 63 на зубчатую передачу 65 переднего хода. Движущая сила, передаваемая на переднюю зубчатую передачу 65, затем передается на выходной вал 68. Когда муфта 64 переднего хода соединена с зубчатой передачей 65 переднего хода, движущая сила двигателя 51 передается на выходной вал 68. Когда муфта 64 переднего хода и зубчатая передача 65 переднего хода отсоединены друг от друга, движущая сила не передается с входного вала 63 на зубчатую передачу 65 переднего хода.
Муфта 66 заднего хода и зубчатая передача 67 заднего хода
Муфта 66 заднего хода расположена на входном валу 63. Зубчатая передача 67 заднего хода расположена между муфтой 66 заднего хода и выходным валом 68. Муфта 66 заднего хода переключается между включенным состоянием и выключенным состоянием. Зацепленное состояние представляет собой состояние, в котором входной вал 63 и зубчатая передача 67 заднего хода соединены друг с другом. Отключенное состояние представляет собой состояние, в котором входной вал 63 и зубчатая передача 67 заднего хода отсоединены друг от друга. Когда муфта 66 заднего хода соединяет первичный вал 63 и зубчатую передачу 67 заднего хода друг с другом, движущая сила передается от входного вала 63 на зубчатую передачу 67 заднего хода. Движущая сила, передаваемая на зубчатую передачу 67 заднего хода, затем передается на выходной вал 68. Когда муфта 66 заднего хода соединена с зубчатой передачей 67 заднего хода, движущая сила двигателя 51 передается на выходной вал 68. Когда муфта 66 заднего хода и зубчатая передача 67 заднего хода отсоединены друг от друга, движущая сила не передается с входного вала 63 на зубчатую передачу 67 заднего хода.
Муфта 64 переднего хода и муфта 66 заднего хода являются гидравлическими муфтами. Гидравлические муфты могут быть мокрыми многодисковыми муфтами.
Выходной вал 68
Выходной вал 68 получает движущую силу, когда включена муфта 64 переднего хода или муфта 66 заднего хода. Выходной вал 68 вращается под действием движущей силы, передаваемой от муфты 64 переднего хода или муфты 66 заднего хода.
Электромагнитные клапаны 69
Два электромагнитных клапана 69 соответствуют муфте 64 переднего хода и муфте 66 заднего хода соответственно. Электромагнитные клапаны 69 управляют подачей и выпуском гидравлического масла к муфте 64 переднего хода и муфте 66 заднего хода и от них. Электромагнитные клапаны 69 подают или выпускают гидравлическое масло в соответствии с количеством электроэнергии, подаваемой на соленоиды. Муфты 64, 66 соответственно переключаются между включенным состоянием и выключенным состоянием путем подачи и выпуска гидравлического масла с помощью электромагнитных клапанов 69. Когда модуль 17 подачи команды направления дает команду на движение вперед, муфта 64 движения вперед и передняя зубчатая передача 65 соединяются друг с другом. Когда блок 17 подачи команды направления дает команду на движение назад, муфта 66 заднего хода и зубчатая передача 67 заднего хода соединяются друг с другом. Когда блок 17 подачи команды направления выдает команду нейтрального состояния, то есть когда блок 17 подачи команды направления находится в нейтральном положении, муфта 64 переднего хода и муфта 66 заднего хода выключаются. Когда включена одна из муфт 64 переднего хода и муфты 66 заднего хода, в двигателе 51 создается сопротивление из-за торможения двигателем. Напротив, когда муфта 64 переднего хода и муфта 66 заднего хода обе выключены, в двигателе 51 не возникает никакого сопротивления из-за торможения двигателем.
Электромагнитный клапан 69 выполнен с возможностью управления контроллером 31. Контроллер 31 регулирует количество электроэнергии, подаваемой на соленоиды в электромагнитных клапанах 69, тем самым управляя подачей и сливом гидравлического масла с помощью электромагнитного клапана 69.
Дифференциал 70 и ось 71
Дифференциал 70 соединен с выходным валом 68. Ось 71 соединена с дифференциалом 70. Ведущие колеса 12, 13 соединены с осью 71. Ось 71 вращается, когда вращается выходной вал 68. Промышленное транспортное средство 10 движется, когда ведущие колеса 12, 13 вращаются за счет вращения оси 71. Когда муфта 64 переднего хода и зубчатая передача 65 переднего хода соединены друг с другом, промышленное транспортное средство 10 движется вперед. Когда муфта 66 заднего хода и зубчатая передача 67 заднего хода соединены друг с другом, промышленное транспортное средство 10 движется назад.
Датчик 72 скорости транспортного средства
Датчик 72 скорости транспортного средства представляет собой датчик для определения скорости транспортного средства, то есть скорости движения кузова 11 транспортного средства. Скорость движения кузова 11 транспортного средства рассматривается как скорость движения промышленного транспортного средства 10. Датчик 72 скорости транспортного средства предусмотрен, например, на выходном валу 68 или на оси 71. Датчик 72 скорости транспортного средства выдает импульсный сигнал, соответствующий скорости транспортного средства, на контроллер 73 перемещения.
Контроллер 73 перемещения
Контроллер 73 перемещения представляет собой блок управления двигателем, который управляет двигателем 51. Аппаратная конфигурация контроллера 73 перемещения, например, аналогична конфигурации контроллера 31. Контроллер 73 перемещения регулирует степень открытия дроссельной заслонки, управляя приводом 52 дроссельной заслонки. Движущая сила двигателя 51 регулируется путем регулировки степени открытия дроссельной заслонки. Контроллер 73 перемещения управляет электромагнитным клапаном 69, который переключает муфты 64, 66 между включенным состоянием и выключенным состоянием. Соответственно муфты 64, 66 переключаются между включенным состоянием и выключенным состоянием.
Контроллер 73 перемещения и контроллер 31 настроены на получение информации друг от друга через шину 40. Контроллер 31 передает заданный командный сигнал по шине 40. Таким образом, контроллер 31 управляет двигателем 51 через контроллер 73 перемещения. Командный сигнал представляет собой, например, целевое значение крутящего момента или скорость вращения двигателя 51. Целевое значение определяется, например, в соответствии с работой акселератора 16. Контроллер 73 перемещения согласно настоящему варианту осуществления управляет приводом 52 дроссельной заслонки таким образом, что скорость вращения двигателя 51, определяемая датчиком 54 скорости вращения, становится целевым значением. Соответственно, двигатель 51 создает движущую силу. Движущая сила двигателя 51 разгоняет промышленное транспортное средство 10. Следовательно, акселератор 16 рассматривается как устройство, которое дает команду на ускорение за счет движущей силы двигателя 51 в ответ на действия водителя.
Кроме того, контроллер 31 способен получать скорость вращения двигателя 51, определяемую датчиком 54 скорости вращения, через шину 40 и контроллер 73 перемещения.
Режим работы М
Контроллер 31 устанавливает режим работы М на основе состояния водителя, обнаруженного блоком 36 обнаружения водителя. Рабочий режим М включает в себя нормальный режим M1, режим М2 ограничения и режим М3 прерывания.
Нормальный режим M1
Нормальный режим M1 представляет собой режим, в котором промышленное транспортное средство 10 движется в ответ на действия водителя. В нормальном режиме M1 промышленное транспортное средство 10 ускоряется в соответствии с приводимой в действие величиной акселератора 16. То есть, нормальный режим M1 представляет собой рабочий режим М, в котором ускорение промышленного транспортного средства 10 управляется работой акселератора 16. В нормальном режиме M1 на соленоид электромагнитного клапана 69 подается питание в ответ на работу блока 17 подачи команды направления. В результате, электромагнитный клапан 69 подает или выпускает гидравлическое масло в соответствии с работой блока 17 подачи команды направления. Рабочий режим М, когда промышленное транспортное средство 10 активировано, то есть начальное состояние рабочего режима М, является нормальным режимом M1.
Режим М2 ограничения
Режим М2 ограничения представляет собой режим, в котором движущая сила двигателя 51 ограничена. В режиме М2 ограничения контроллер 31 ограничивает целевое значение скорости вращения двигателя 51 до заданного предельного значения. Соответственно, ускорение промышленного транспортного средства 10 с помощью акселератора 16 является ограниченным. То есть, режим М2 ограничения является рабочим режимом М, в котором ограничено ускорение промышленного транспортного средства 10 с помощью акселератора 16. Предельным значением является, например, частота вращения двигателя 51 на холостом ходу. Контроллер 31 передает целевое значение скорости вращения на контроллер 73 перемещения. Когда целевое значение, которое соответствует приводимой в действие величине акселератора 16, превышает предельное значение, контроллер 31 устанавливает целевое значение скорости вращения на значение ограничения. Контроллер 73 перемещения управляет двигателем 51 таким образом, что скорость вращения двигателя 51 становится целевым значением, передаваемым от контроллера 31.
Целевое значение скорости вращения двигателя 51 может быть установлено равным значению ограничения в нормальном режиме M1. В этом случае значение ограничения в режиме М2 ограничения меньше предельного значения в нормальном режиме M1. Режим М2 ограничения представляет собой режим работы М, в котором предельное значение скорости вращения двигателя 51 меньше, чем в нормальном режиме Ml. Другими словами, нормальный режим M1 представляет собой рабочий режим М, в котором предельное значение больше, чем в режиме М2 ограничения.
В режиме М2 ограничения на соленоид электромагнитного клапана 69 подается питание в ответ на работу блока 17 подачи команды направления. В результате электромагнитный клапан 69 подает или выпускает гидравлическое масло в соответствии с работой блока 17 подачи команды направления.
Режим М3 прерывания
Режим М3 прерывания представляет собой режим, в котором прерывается передача движущей силы на ведущие колеса 12, 13 механизмом 60 передачи движущей силы. В режиме М3 прерывания контроллер 31 прекращает подачу питания на соленоид электромагнитного клапана 69. Соответственно прекращается подача гидравлического масла к муфтам 64, 66. Следовательно, в отличие от нормального режима M1 или режима М2 ограничения, обе муфты 64, 66 выключаются в режиме М3 прерывания независимо от направления срабатывания блока 17 подачи команды направления. Когда обе муфты 64, 66 отключены, движущая сила от двигателя 51 к ведущим колесам 12, 13 прерывается механизмом 60 передачи движущей силы. Соответственно, в режиме М3 прерывания движущая сила не передается от двигателя 51 на ведущие колеса 12, 13, даже если двигатель 51 работает. Таким образом, режим М3 прерывания представляет собой режим работы М, в котором промышленное транспортное средство 10 не может быть ускорено с помощью акселератора 16. В режиме М3 прерывания, поскольку передача движущей силы механизмом 60 передачи движущей силы прерывается, проскальзывание не происходит.
Процесс управления движением
Контроллер 31 выполняет процесс управления движением промышленного транспортного средства 10 на основе режима работы М. Теперь будет описан один пример процесса управления движением. Процесс управления движением согласно настоящему варианту осуществления повторяется, пока промышленное транспортное средство 10 приводится в действие.
Этап S1
Как показано на фиг. 3, на этапе S1 контроллер 31 определяет, является ли состояние водителя состоянием отсутствия. Это определение выполняется на основе, например, результата обнаружения блока 36 обнаружения водителя.
Этап S2
Если результат определения на этапе S1 является положительным, то есть если состояние водителя является состоянием отсутствия, выполняется процесс этапа S2. На этапе S2 контроллер 31 выполняет процесс состояния отсутствия. Процесс состояния отсутствия представляет собой процесс установки режима работы М, когда состоянием водителя является состояние отсутствия. После завершения процесса в состоянии отсутствия контроллер 31 завершает процесс управления перемещением и перезапускает процесс управления перемещением с этапа S1.
Контроллер 31 согласно настоящему варианту осуществления выполняет процесс состояния отсутствия на рабочем месте, когда продолжительность Т1 состояния отсутствия на рабочем месте становится больше или равна заданному времени Td приостановки. Длительность Т1 состояния отсутствия представляет собой период, в течение которого продолжается состояние отсутствия. В частности, продолжительность Т1 состояния отсутствия представляет собой период времени, в течение которого продолжается состояние отсутствия с момента времени, когда блок 36 обнаружения водителя определяет состояние отсутствия. Время Td приостановки может быть установлено произвольно. Например, время Td приостановки составляет 0,5 секунды или менее, предпочтительно 0,2 секунды или менее. Когда продолжительность Т1 состояния отсутствия короче, чем время Td приостановки, контроллер 31 пропускает процесс состояния отсутствия и завершает процесс управления перемещением.
Процесс при состоянии отсутствия
Теперь будет описан пример процесса при состоянии отсутствия на этапе S2.
Этап S21
Как показано на фиг. 4, на этапе S21 контроллер 31 определяет, является ли продолжительность Т1 состояния отсутствия короче или равной заданному времени Тх определения состояния отсутствия. Время Тх определения состояния отсутствия может быть установлено произвольно на основе ожидаемых способов возникновения состояния отсутствия. Время Тх определения состояния отсутствия может быть установлено произвольно, если оно больше, чем время То! приостановки, и составляет, например, 1 секунду или более и 5 секунд или менее, и предпочтительно 1,5 секунды или более и 3 секунды или менее. Контроллер 31, выполняющий процесс этапа S21, соответствует блоку определения состояния отсутствия согласно настоящему варианту осуществления.
Этап S22
В случае, когда результат определения на этапе S21 является положительным, выполняется процесс этапа S22. Случай, в котором результат определения на этапе S21 является положительным, соответствует случаю, в котором продолжительность Т1 состояния отсутствия определена как более короткая или равная времени Тх определения состояния отсутствия. На этапе S22 контроллер 31 устанавливает режим М работы в режим М2 ограничения. В этом случае контроллер 31 изменяет рабочий режим М с нормального режима M1 на режим М2 ограничения. Контроллер 31, выполняющий процесс этапа S22, соответствует блоку установки ограничений согласно настоящему варианту осуществления.
Этап S23
В случае, когда результат определения на этапе S21 является отрицательным, выполняется процесс этапа S23. Случай, в котором результат определения на этапе S21 является отрицательным, соответствует случаю, в котором контроллер 31, который служит блоком определения состояния отсутствия, определяет, что продолжительность Т1 состояния отсутствия больше, чем время Тх определения состояния отсутствия. На этапе S23 контроллер 31 устанавливает режим М работы в режим М3 прерывания. В этом случае контроллер 31 изменяет режим работы М с режима М2 ограничения на режим М3 прерывания. Контроллер 31, выполняющий процесс этапа S23, соответствует блоку настройки прерывания настоящего варианта осуществления.
После процесса этапа S22 или этапа S23 контроллер 31 завершает процесс состояния отсутствия.
Этап S3
Если результат определения на этапе S1 является отрицательным, то есть если состоянием водителя является состояние присутствия, процесс этапа S3 выполняется, как показано на фиг. 3. На этапе S3 контроллер 31 определяет, является ли рабочий режим М нормальным режимом M1.
Если результат определения на этапе S3 является положительным, контроллер 31 завершает процесс управления перемещением, сохраняя при этом рабочий режим М в нормальном режиме M1. То есть, если промышленное транспортное средство 10 движется в обычном режиме M1, а состояние водителя является состоянием присутствия, продолжается движение в обычном режиме M1.
Этап S4
В случае, когда результат определения на этапе S3 является отрицательным, выполняется процесс этапа S4. Случай, в котором результат определения на этапе S3 является отрицательным, соответствует случаю, в котором рабочий режим М установлен на режим М2 ограничения или режим М3 прерывания. Ситуация, которая соответствует такому случаю, включает в себя, например, ситуацию, в которой режим М2 ограничения или режим М3 прерывания задается процессом состояния отсутствия на этапе S2, выполненным в прошлом, и сохраняется. На этапе S4 контроллер 31 выполняет процесс возврата. Процесс возврата представляет собой процесс установки в нормальный режим M1 снова рабочего режима М, который был установлен в режим М2 ограничения или режим М3 прерывания. После завершения процесса возврата контроллер 31 завершает процесс управления перемещением и перезапускает процесс управления перемещением с этапа S1.
Процесс возврата
Теперь будет описан пример процесса возврата на этапе S4.
Этап S41
Как показано на фиг. 5, на этапе S41 контроллер 31 определяет, установлен ли режим М работы в режим М2 ограничения.
Этап S42
Если результат определения на этапе S41 является положительным, то есть, если рабочий режим М установлен на режим М2 ограничения, выполняется процесс этапа S42. На этапе S42, в случае, когда рабочий режим М установлен на режим М2 ограничения, контроллер 31 устанавливает рабочий режим М на нормальный режим M1, когда состояние водителя, определяемое блоком 36 обнаружения водителя, становится состоянием присутствия. Для выполнения процесса этапа S42 в настоящем варианте осуществления достаточно, если состояние водителя переключается из состояния отсутствия в состояние присутствия, и нет необходимости приводить в действие педаль акселератора 16 или модуль 17 подачи команды направления. В этом случае контроллер 31 изменяет режим работы М с режима М2 ограничения на нормальный режим M1.
Время, в которое контроллер 31 изменяет режим работы М с режима М2 ограничения на нормальный режим M1, не ограничивается временем, в которое блок 36 обнаружения водителя определяет состояние присутствия. Например, контроллер 31 может изменить режим работы М с режима М2 ограничения на нормальный режим M1, когда истекает заданное время приостановки после того, как блок 36 обнаружения водителя определяет состояние присутствия.
Этап S43
Если результат определения на этапе S41 является отрицательным, то есть если режим М работы установлен на режим М3 прерывания, выполняется процесс этапа S43. На этапе S43 контроллер 31 определяет, выполняется ли заданное условие отмены. Условие отмены представляет собой условие, которое необходимо выполнить, чтобы сбросить рабочий режим М в нормальный режим M1. Условие отмены включает в себя состояние, в котором состоянием водителя является состояние присутствия, и состояние, в котором блок 35 определения направления обнаружил изменение рабочего положения. Состояние, в котором блок 35 определения направления обнаружил изменение рабочего положения, относится к состоянию, в котором рабочее направление блока 17 подачи команды направления было изменено.
В случае, когда результат определения на этапе S43 является положительным, то есть в случае, когда выполняется условие отмены, выполняется процесс этапа S42. Случай, в котором выполняется условие отмены, включает в себя случай, в котором состоянием водителя является состояние присутствия, и блок 35 определения направления обнаружил изменение рабочего положения. На этапе S42 контроллер 31 устанавливает рабочий режим М на нормальный режим M1. Если контроллер 31 выполняет процесс этапа S42 в процессе возврата, контроллер 31 изменяет режим работы М с режима прерывания М3 на нормальный режим M1 на этапе S42.
Если результат определения на этапе S43 является отрицательным, то есть если условие отмены не выполняется, контроллер 31 пропускает этап S42 и завершает процесс возврата. Следовательно, рабочий режим М поддерживается в режиме М3 прерывания.
Работа
Теперь будет описана работа настоящего варианта осуществления изобретения.
Водитель может сойти с сиденья 15 водителя во время движения промышленного транспортного средства 10 в обычном режиме M1. Такое состояние отсутствия возникает, например, когда водитель проверяет окружающую обстановку. В частности, в промышленном транспортном средстве 10, таком как вилочный погрузчик, устройство 20 для обработки грузов или груз, установленный на устройстве 20 для обработки грузов, может блокировать переднее поле зрения с сиденья 15 водителя. Следовательно, даже в ситуации, в которой промышленное транспортное средство 10 находится в движении, водитель может встать с сиденья 15 водителя, чтобы проверить обстановку перед промышленным транспортным средством 10. В этом случае блок 36 обнаружения водителя определяет, что состояние водителя стало состоянием отсутствия. Соответственно, результат определения на этапе S1 является положительным, и на этапе S2 выполняется процесс состояния отсутствия.
По меньшей мере сразу после того, как водитель покидает свое сиденье 15, продолжительность Т1 состояния отсутствия короче или равна времени Тх определения состояния отсутствия. Соответственно, результат определения на этапе S21 является положительным, и рабочий режим М изменяется на режим М2 ограничения на этапе S22. В частности, рабочий режим М изменяется с нормального режима M1 на режим М2 ограничения. Таким образом, целевое значение скорости вращения двигателя 51, передаваемое от контроллера 31 на контроллер 73 перемещения, ниже, чем в нормальном режиме M1. Соответственно скорость вращения двигателя 51 снижается. В это время передача движущей силы механизмом 60 передачи движущей силы не прерывается. Следовательно, в режиме М2 ограничения сопротивление двигателя 51 из-за торможения двигателем передается на ведущие колеса 12, 13 через механизм 60 передачи движущей силы, как и в обычном режиме M1.
Если водитель продолжает быть не на своем месте после того, как рабочий режим М установлен в режим М2 ограничения, продолжительность Т1 состояния отсутствия становится больше, чем время Тх определения состояния отсутствия. В этом случае результат определения на этапе S21 является отрицательным. Таким образом, контроллер 31 устанавливает режим М работы в режим М3 прерывания на этапе S23. В частности, контроллер 31 изменяет режим работы М с режима М2 ограничения на режим М3 прерывания. Соответственно, контроллер 31 прекращает подачу питания на соленоид электромагнитного клапана 69 и прерывает передачу движущей силы механизмом 60 передачи движущей силы. В результате в режиме М3 прерывания, в отличие от случаев нормального режима M1 или режима М2 ограничения, сопротивление двигателя 51 за счет торможения двигателем не передается на ведущие колеса 12, 13.
Преимущества
Настоящий вариант осуществления изобретения обеспечивает следующие преимущества.
(1-1) Режим работы М включает в себя нормальный режим M1, режим М2 ограничения, который ограничивает движущую силу двигателя 51, и режим М3 прерывания, который прерывает передачу движущей силы механизмом передачи движущей силы. 60. Если на этапе S21 определено, что продолжительность Т1 состояния отсутствия короче или равна времени Тх определения состояния отсутствия, контроллер 31 выполняет процесс этапа S22, чтобы установить режим М работы в режим М2 ограничения. Если на этапе S21 определено, что продолжительность Т1 состояния отсутствия больше, чем время Тх определения состояния отсутствия, контроллер 31 выполняет процесс этапа S23, чтобы установить режим М работы в режим М3 прерывания.
В этой конфигурации, даже если водитель покидает свое сиденье 15 водителя, так что состояние водителя является состоянием отсутствия, контроллер 31 устанавливает режим работы М в режим М2 ограничения, если продолжительность Т1 состояния отсутствия короче или равна времени Тх определения состояния отсутствия. В это время движущая сила ограничивается без прерывания передачи движущей силы, если продолжительность состояния отсутствия является короткой, то есть если продолжительность Т1 состояния отсутствия короче или равна времени Тх определения состояния отсутствия. Если состояние отсутствия продолжается после того, как рабочий режим М установлен на режим М2 ограничения, так что продолжительность Т1 состояния отсутствия становится больше, чем время Тх определения состояния отсутствия, рабочий режим М, который был установлен на режим М2 ограничения, устанавливается на режим М3 прерывания. Соответственно, передача движущей силы прерывается после ограничения движущей силы в режиме М2 ограничения.
В результате, изменение эксплуатационных ощущений промышленного транспортного средства 10 из-за того, что водитель покидает свое сиденье 15, уменьшается по сравнению со случаем, в котором рабочий режим М, который был установлен на нормальный режим M1, устанавливается в режим М3 прерывания без установки в режим М2 ограничения. Таким образом, предотвращается снижение комфорта при вождении промышленного транспортного средства 10.
(1-2) В случае, когда режим М работы установлен на режим М2 ограничения, контроллер 31 выполняет процесс этапа S42, чтобы установить режим М работы на нормальный режим M1, когда состояние водителя, определяемое блоком 36 обнаружения водителя, переходит в состояние присутствия.
При такой конфигурации, даже в случае, когда рабочий режим М установлен на режим М2 ограничения, рабочий режим М возвращается к нормальному режиму M1 посредством простой операции, например, когда водитель снова сидит на сиденье 15 водителя. Следовательно, легко вернуть рабочий режим М из режима М2 ограничения в нормальный режим M1.
(1-3) Когда рабочий режим М установлен в режим М3 прерывания, контроллер 31 определяет, является ли состояние водителя состоянием присутствия на этапе S43, и обнаружил ли блок 35 определения направления изменение направления движения блока 17 подачи команды направления. Когда результат определения на этапе S43 является положительным, контроллер 31 выполняет процесс этапа S42, чтобы установить рабочий режим М в нормальный режим M1.
В этой конфигурации, когда передача движущей силы прерывается в режиме М3 прерывания, водителю необходимо сесть на сиденье 15 водителя, чтобы вернуть рабочий режим М в нормальный режим M1. В дополнение к этому, чтобы вернуть рабочий режим М к нормальному режиму M1, необходимо изменить рабочее положение, задействовав блок 17 подачи команды направления. Таким образом, рабочий режим М может быть возвращен в нормальный режим M1 не только тогда, когда водитель сидит, но также и тогда, когда водитель указывает свое намерение продолжить движение промышленного транспортного средства 10, управляя блоком 17 подачи команды направления. Это снижает вероятность того, что рабочий режим М будет возвращен в нормальный режим M1 без намерения водителя управлять промышленным транспортным средством 10, так что повышается безопасность промышленного транспортного средства 10.
Второй вариант осуществления изобретения
Теперь будет описано промышленное транспортное средство 10 согласно второму варианту осуществления. Теми же самыми ссылочными позициями обозначены те компоненты во втором варианте осуществления, которые являются такими же, как соответствующие компоненты в первом варианте осуществления, и их повторные описания могут быть опущены.
Как показано на фиг. 6, часть последовательности процесса состояния отсутствия различается между первым вариантом осуществления и вторым вариантом осуществления. Теперь будет описан один пример процесса в состоянии отсутствия согласно второму варианту осуществления изобретения.
Этап S101
На этапе S101 контроллер 31 определяет, находится ли промышленное транспортное средство 10 в состоянии остановки. Контроллер 31, выполняющий процесс этапа S101, соответствует блоку определения состояния остановки настоящего варианта осуществления. Контроллер 31 настоящего варианта осуществления определяет, находится ли промышленное транспортное средство 10 в состоянии остановки, на основе скорости транспортного средства, определенной датчиком 72 скорости транспортного средства. Когда скорость транспортного средства, определенная датчиком 72 скорости транспортного средства, превышает заданный порог скорости, контроллер 31 определяет, что промышленное транспортное средство 10 находится в движении. Когда скорость транспортного средства ниже или равна пороговой скорости, контроллер 31 определяет, что промышленное транспортное средство 10 находится в состоянии остановки. Определение того, движется ли промышленное транспортное средство 10 или находится в состоянии остановки, не ограничивается описанным выше способом, и можно использовать любой способ. Например, контроллер 31 может выполнять определение на основе результата определения датчика 54 скорости вращения.
В случае, когда результат определения на этапе S101 является положительным, выполняется процесс этапа S23. Случай, в котором результат определения на этапе S101 является положительным, соответствует случаю, в котором определяется состояние отсутствия, в то время как промышленное транспортное средство 10 находится в состоянии остановки. На этапе S23 контроллер 31 устанавливает режим М работы в режим М3 прерывания. В этом случае контроллер 31 изменяет режим работы М с нормального режима M1 на режим М3 прерывания. Контроллер 31, выполняющий процессы этапа S101 и этапа S23, соответствует блоку принудительного прерывания настоящего варианта осуществления.
Этап S102
Если результат определения на этапе S101 является отрицательным, то есть если определено, что промышленное транспортное средство 10 движется, выполняется процесс этапа S102. На этапе S102 контроллер 31 определяет, работает ли акселератор 16. То, используется ли акселератор 16, используется в качестве показателя, указывающего, намерен ли водитель управлять промышленным транспортным средством 10.
Если результат определения на этапе S102 является отрицательным, то есть если определено, что акселератор 16 не работает, выполняется процесс этапа S21. Таким образом, если состояние отсутствия определено в ситуации, в которой акселератор 16 не работает в нормальном режиме M1, рабочий режим М изменяется с нормального режима M1 на режим М2 ограничения на этапе S22, или рабочий режим М изменяется из нормального режима M1 на режим М3 прерывания на этапе S23.
Этап S103
Если результат определения на этапе S102 является положительным, то есть если акселератор 16 работает, выполняется процесс этапа S103. На этапе S103 контроллер 31 определяет, является ли рабочий режим М нормальным режимом M1.
Если результат определения на этапе S103 является отрицательным, то есть если режим М работы является режимом М2 ограничения или режимом М3 прерывания, выполняется процесс этапа S21. Таким образом, контроллер 31 устанавливает режим М работы в режим М2 ограничения или режим М3 прерывания в соответствии с длительностью Т1 состояния отсутствия.
Этап S104
В случае, когда результат определения на этапе S103 является положительным, выполняется процесс этапа S104. Случай, в котором результат определения на этапе S103 является положительным, соответствует случаю, в котором определено состояние отсутствия, когда акселератор 16 работает в нормальном режиме M1. Контроллер 31 на этапе S104 определяет, является ли продолжительность Т1 состояния отсутствия короче или равной времени Тх определения состояния отсутствия.
В случае, когда результат определения на этапе S104 является отрицательным, выполняется процесс этапа S23. Случай, в котором результат определения на этапе S104 является отрицательным, представляет собой, например, случай, когда акселератор 16 работал в течение периода, превышающего время Тх определения состояния отсутствия, в то время как состояние отсутствия продолжается. В этом случае контроллер 31 устанавливает режим М работы в режим М3 прерывания. Таким образом, можно предотвратить движение транспортного средства промышленного назначения 10 в нормальном режиме M1 в течение длительного периода времени, в то время как сохраняется состояние отсутствия.
Этап S105
В случае, когда результат определения на этапе S104 является положительным, выполняется процесс этапа S105. На этапе S105 контроллер 31 продолжает движение в обычном режиме M1. В этом случае процессы этапа S21 и этапа S22 опускаются. Таким образом, даже в случае, когда определяется состояние отсутствия, в то время как акселератор 16 работает в нормальном режиме M1, контроллер 31 поддерживает рабочий режим М в нормальном режиме M1 до тех пор, пока длительность Т1 состояния отсутствия сиденья меньше, чем или равным времени Тх определения состояния отсутствия. Контроллер 31, выполняющий процессы этапов S103-S105, соответствует блоку продолжения движения согласно настоящему варианту осуществления изобретения.
Работа
Когда водитель покидает свое сиденье 15, даже если промышленное транспортное средство 10 находится в состоянии остановки в нормальном режиме M1, результат определения на этапе S101 является положительным, и выполняется процесс этапа S23. На этапе S23 контроллер 31 устанавливает режим М работы в режим М3 прерывания. В этом случае контроллер 31 изменяет режим работы М с нормального режима M1 на режим М3 прерывания. Следовательно, если водитель покидает сиденье 15 водителя, когда промышленное транспортное средство 10 находится в состоянии остановки, контроллер 31 опускает ограничение движущей силы в режиме М2 ограничения и прерывает передачу движущей силы посредством механизма 60 передачи движущей силы.
Если водитель покидает свое сиденье 15 во время движения промышленного транспортного средства 10, результат определения на этапе S101 является отрицательным, и выполняется процесс этапа S102. В этом случае, если водитель управляет акселератором 16, результат определения на этапе S102 является положительным, и выполняется процесс этапа S103. В этом случае, если рабочий режим М является нормальным режимом Ml, результат определения на этапе S103 является положительным, и выполняется процесс этапа S105. На этапе S105 контроллер 31 продолжает движение в нормальном режиме M1, даже если состояние водителя является состоянием отсутствия.
Преимущества
Второй вариант осуществления настоящего изобретения обеспечивает следующие преимущества.
(2-1) Контроллер 31 выполняет процесс этапа S101, в котором определяется, находится ли промышленное транспортное средство 10 в состоянии остановки, и процесс этапа S23, в котором режим работы М устанавливается в режим М3 прерывания, если определяется состояние отсутствия, когда промышленное транспортное средство 10 находится в состоянии остановки.
В этой конфигурации, в случае, когда промышленное транспортное средство 10 находится в состоянии остановки, рабочий режим М устанавливается в режим М3 прерывания без выполнения режима М2 ограничения, даже если продолжительность Т1 состояния отсутствия короче или равна времени Тх определения состояния отсутствия. В режиме М3 прерывания, поскольку передача движущей силы механизмом 60 передачи движущей силы прерывается, проскальзывание не происходит. Таким образом, можно предотвратить движение промышленного транспортного средства 10 в состоянии остановки из-за проскальзывания, когда водитель покинул сиденье 15 водителя.
(2-2) Если состояние отсутствия сиденья определено, когда акселератор 16 работает в нормальном режиме M1, контроллер 31 выполняет процесс этапа S105, в котором движение в нормальном режиме M1 продолжается.
Если акселератор 16 задействован, существует вероятность того, что водитель намеревается продолжить вождение промышленного транспортного средства 10. Таким образом, даже если состояние водителя является состоянием отсутствия, водитель может управлять промышленным транспортным средством 10 в обычном режиме M1, управляя акселератором 16. Следовательно, можно дополнительно улучшить комфорт при вождении промышленного транспортного средства 10, отражая намерение водителя продолжать управление промышленным транспортным средством 10.
Модификации
Вышеописанные варианты осуществления изобретения могут быть изменены, как будет описано далее. Вышеописанные варианты осуществления и следующие модификации могут быть объединены до тех пор, пока объединенные модификации остаются технически совместимыми друг с другом.
Процессы управления перемещением, описанные в первом и втором вариантах осуществления, являются просто примерами, и настоящее изобретение ими не ограничивается. Например, во втором варианте осуществления может быть опущен процесс этапа S101. Аналогично, во втором варианте осуществления могут быть опущены процессы этапов S102-S105.
В первом и втором вариантах осуществления процесс этапа S41 может быть опущен. В этом случае, например, контроллер 31 выполняет процесс этапа S43 независимо от того, является ли рабочий режим М режимом М2 ограничения или режимом М3 прерывания. Даже в случае режима М2 ограничения контроллер 31 устанавливает рабочий режим М на нормальный режим M1, если выполняется условие отмены.
Другими словами, инициирование изменения режима М работы с режима М2 ограничения на нормальный режим M1 не ограничивается тем фактом, что состояние водителя, определяемое блоком 36 обнаружения водителя, становится состоянием присутствия.
Блок 36 обнаружения водителя может быть отделен от контроллера 31 или интегрирован с ним. Блок 36 обнаружения водителя может быть функциональным блоком, реализованным контроллером 31.
В первом и втором вариантах осуществления условие отмены не обязательно должно включать в себя состояние, в котором состоянием водителя является состояние присутствия и состояние, в котором блок 35 определения направления обнаружил изменение рабочего положения. Например, условие отмены может выполняться, когда нажимается кнопка отмены, предусмотренная в промышленном транспортном средстве 10.
В первом и втором вариантах осуществления инициирование выполнения процесса этапа S42, который устанавливает рабочий режим М в нормальный режим M1 в случае, когда рабочий режим М устанавливается в режим М2 ограничения, не ограничивается тем фактом, что состояние водителя становится состоянием присутствия, но может быть изменено. Например, инициирование может быть таким же, как условие отмены на этапе S43.
В первом и втором вариантах осуществления нормальный режим M1 не обязательно должен быть определен явно. Например, рабочий режим М, отличный от режима М2 ограничения и режима М3 прерывания, может быть определен как нормальный режим M1.
В первом и втором вариантах осуществления промышленное транспортное средство 10 может включать в себя ремень безопасности, пряжку, соединенную с ремнем безопасности, и датчик использования ремня безопасности. Ремень безопасности, пряжка и датчик использования ремня безопасности на чертежах не показаны. Ремень безопасности, пряжка и датчик использования ремня безопасности прикреплены к сиденью 15 водителя.
Датчик использования ремня безопасности выполнен с возможностью определения того, пристегнут ли водитель ремнем безопасности. Например, датчик использования ремня безопасности включает в себя переключатель. Например, переключатель датчика использования ремня безопасности включается, когда ремень безопасности пристегнут к замку, и выключается, когда ремень безопасности не пристегнут к замку. Конкретная конфигурация датчика использования ремня безопасности является произвольной и может включать в себя, например, чувствительный к давлению датчик, оптический датчик или камеру.
Блок 36 обнаружения водителя может определять состояние водителя на основе результата обнаружения датчика использования ремня безопасности. Например, блок 36 обнаружения водителя определяет, что состоянием водителя является состоянием присутствия в случае, когда датчик использования ремня безопасности включен, и определяет, что состояние водителя является состоянием отсутствия в случае, когда датчик использования ремня безопасности выключен.
Кроме того, блок 36 обнаружения водителя может определять состояние водителя на основе результата определения переключателя 18 сиденья и результата определения датчика использования ремня безопасности. Например, блок 36 обнаружения водителя определяет, что состоянием водителя является состояние присутствия в случае, когда датчик использования ремня безопасности включается после включения переключателя 18 сиденья. Эта конфигурация способствует вождению промышленного транспортного средства 10 при правильном использовании ремня безопасности.
С другой стороны, блок 36 обнаружения водителя определяет, что состояние водителя является состоянием отсутствия сиденья в случае, когда переключатель 18 сиденья находится в положении ВЫКЛ, в случае, когда датчик использования ремня безопасности выключен, или в случае, когда датчик использования ремня безопасности включается раньше, чем включается переключатель 18 сиденья. Случай, в котором датчик использования ремня безопасности включается до включения переключателя 18 сиденья, включает, например, случай, в котором ремень безопасности пристегивается к пряжке до того, как водитель сядет на сиденье 15 водителя.
Информация, используемая блоком 36 обнаружения водителя для определения состояния водителя, не ограничивается результатом определения переключателя 18 сиденья и может быть изменена.
В первом и втором вариантах промышленное транспортное средство 10 не ограничивается вилочным погрузчиком. Например, промышленное транспортное средство 10 может быть тягачом.
В вышеприведенные примеры могут быть внесены различные изменения в форме и деталях без отклонения от сущности и объема формулы изобретения и ее эквивалентов. Примеры даны только для иллюстрации, а не для ограничения. Описания признаков в каждом примере следует рассматривать как применимые к аналогичным признакам или аспектам в других примерах. Подходящие результаты могут быть достигнуты, если последовательности выполняются в другом порядке и/или если компоненты в описанной системе, архитектуре, устройстве или схеме комбинируются по-разному и/или заменяются или дополняются другими компонентами или их эквивалентами. Объем изобретения определяется не подробным описанием, а формулой изобретения и ее эквивалентами. Все варианты в ограничениях объема формулы изобретения и их эквиваленты включены в данное раскрытие.
Группа изобретений относится к промышленному транспортному средству. Промышленное транспортное средство содержит двигатель, ведущее колесо, механизм передачи движущей силы, сиденье водителя, блок обнаружения водителя и контроллер. Блок обнаружения водителя выполнен с возможностью определения состояния водителя из состояний водителя, включающих состояние отсутствия, в котором водитель покидает сиденье водителя, и состояние присутствия, в котором водитель сидит на сиденье водителя. Контроллер выполнен с возможностью установки режима работы из режимов работы на основе состояния водителя, определяемого блоком обнаружения водителя. Режимы работы включают в себя нормальный режим, режим ограничения, который ограничивает движущую силу, и режим прерывания, который прерывает передачу движущей силы на ведущее колесо с помощью механизма передачи движущей силы. Контроллер включает в себя блок определения состояния отсутствия, блок установки ограничения и блок установки прерывания. Достигается возможность изменения эксплуатационных характеристик промышленного транспортного средства во время вождения. 2 н. и 4 з.п. ф-лы, 6 ил.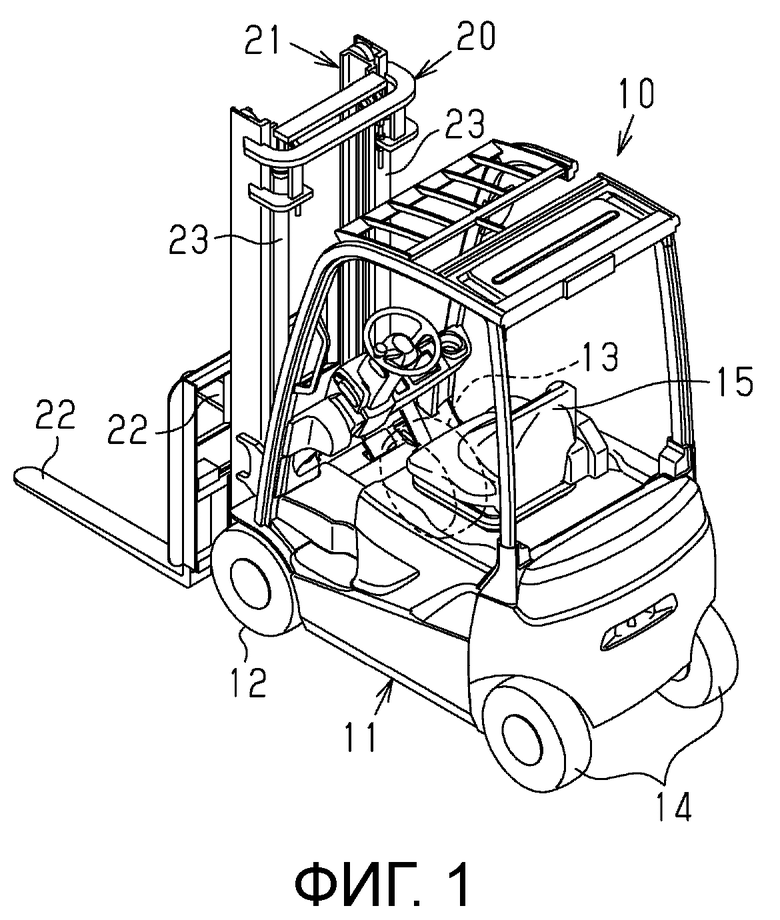
1. Промышленное транспортное средство, содержащее:
двигатель;
ведущее колесо;
механизм передачи движущей силы, выполненный с возможностью передачи движущей силы двигателя на ведущее колесо;
сиденье водителя, на котором сидит водитель;
блок обнаружения водителя, выполненный с возможностью определения состояния водителя из состояний водителя, включающих состояние отсутствия, в котором водитель покидает сиденье водителя, и состояние присутствия, в котором водитель сидит на сиденье водителя; и
контроллер, выполненный с возможностью установки режима работы из режимов работы на основе состояния водителя, определяемого блоком обнаружения водителя,
при этом режимы работы включают в себя нормальный режим, режим ограничения, который ограничивает движущую силу, и режим прерывания, который прерывает передачу движущей силы на ведущее колесо с помощью механизма передачи движущей силы,
причем контроллер включает в себя:
- блок определения состояния отсутствия, выполненный с возможностью определения, когда состояние водителя является состоянием отсутствия, является ли продолжительность состояния отсутствия, в течение которого продолжается состояние отсутствия, более коротким или равным заданному времени определения состояния отсутствия;
- блок установки ограничения, выполненный с возможностью установки режима работы в режим ограничения, когда блок определения состояния отсутствия определяет, что продолжительность состояния отсутствия меньше или равна времени определения состояния отсутствия; и
- блок установки прерывания, выполненный с возможностью установки режима работы в режим прерывания, когда блок определения состояния отсутствия определяет, что продолжительность состояния отсутствия превышает время определения состояния отсутствия.
2. Промышленное транспортное средство по п. 1, в котором контроллер выполнен с возможностью установки в случае, когда режим работы установлен на режим ограничения, режима работы на нормальный режим, когда состояние водителя, определяемое блоком обнаружения водителя, становится состоянием присутствия.
3. Промышленное транспортное средство по п. 1, дополнительно содержащее:
блок подачи команды направления, который задает направление движения промышленному транспортному средству в соответствии с направлением действия; и
блок определения направления, который определяет направление действия,
при этом контроллер выполнен с возможностью установки, когда режим работы установлен на режим прерывания, режима работы на нормальный режим, когда состояние водителя является состоянием присутствия, и блок определения направления определяет изменение направления движения.
4. Промышленное транспортное средство по п. 1, в котором контроллер включает в себя:
блок определения состояния остановки, выполненный с возможностью определения того, находится ли промышленное транспортное средство в состоянии остановки; и
блок принудительного прерывания, выполненный с возможностью установки режима работы в режим прерывания, когда определяется состояние отсутствия, когда промышленное транспортное средство находится в состоянии остановки.
5. Промышленное транспортное средство по любому из пп. 1-4, дополнительно содержащее акселератор, который задает ускорение за счет движущей силы в ответ на действия водителя,
при этом контроллер включает в себя блок продолжения движения, который выполнен с возможностью продолжения движения в нормальном режиме, если определяется состояние отсутствия, когда акселератор работает в нормальном режиме.
6. Способ управления промышленным транспортным средством, содержащим двигатель, ведущее колесо, механизм передачи движущей силы, выполненный с возможностью передачи движущей силы двигателя на ведущее колесо, и сиденье водителя, на котором сидит водитель, при котором:
определяют состояние водителя из состояний водителя, включающих состояние отсутствия, в котором водитель покидает сиденье водителя, и состояние присутствия, в котором водитель сидит на сиденье водителя; и
устанавливают режим работы из режимов работы на основе определяемого состояния водителя,
при этом режимы работы включают в себя нормальный режим, режим ограничения, который ограничивает движущую силу, и режим прерывания, который прерывает передачу движущей силы на ведущее колесо с помощью механизма передачи движущей силы,
причем при установке режима работы:
- определяют, когда состояние водителя является состоянием отсутствия, является ли продолжительность состояния отсутствия, в течение которого продолжается состояние отсутствия, более коротким или равным заданному времени определения состояния отсутствия;
- устанавливают режим работы на режим ограничения, когда определено, что продолжительность состояния отсутствия меньше или равна времени определения состояния отсутствия; и
- устанавливают режим работы в режим прерывания, когда определено, что продолжительность состояния отсутствия превышает время определения состояния отсутствия.
| US 2018170307 A1, 21.06.2018 | |||
| JP 2013185622 A, 19.09.2013 | |||
| Способ регулирования частоты вращения ротора вентильного электродвигателя | 1990 |
|
SU1721774A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ ЕГО АВТОНОМНОГО УПРАВЛЕНИЯ | 2014 |
|
RU2644998C2 |
| JP S63251329 A, 18.10.1988. | |||

