Изобретение относится к области погрузочно-разгрузочной техники.
Известно устройство автоматизированной погрузки-выгрузки поддонов (Патент US5082415A от 21.01.1992), содержащее подъёмник с платформой, включающий горизонтальную верхнюю поверхность, средства для подъёма и опускания верхней поверхности, корпус вилочного подъёмника, расположенный на верхней поверхности, по меньшей мере, одну вилу, приводные средства и звездочки.
Недостатками известного устройства являются:
требование установки в кузов дополнительного оборудования, что исключает возможность использования неподготовленных грузовиков;
установка дополнительного оборудования существенно снижает доступный для груза объём кузова;
отсутствуют системы автоматической подстройки плоскости устройства к плоскости кузова, из-за чего возможны ударные нагрузки на груз;
отсутствуют системы, отслеживающие расстояние от передней стенки кузова до тары с грузом, из-за чего возможны ударные нагрузки на груз;
отсутствует конструкция прижима груза во избежание коллизии с бортами при погрузке, из-за чего возможно повреждение груза;
использование пневмоподушки для подъёма тары с грузом, гидроцилиндров для подъёма платформы в дополнение к существующему цепному приводу существенно усложняет производство и эксплуатацию;
максимальное число единовременно загружаемых поддонов составляет 14 штук: 7 рядов по два поддона в ряд.
Известно устройство для автоматизированной погрузки-выгрузки поддонов (Патент EP2918526 от 16.09.2015), содержащее раму, подрамник, систему приводов, средство выравнивания.
Недостатками известного изобретения являются:
конструктивно-технологическая сложность изготовления, связанная с применением пневматических механизмов для подъёма груза транспортировщиком;
использование оптических датчиков существенно снижает возможность эксплуатации в условиях наличия пыли и снега.
Известно устройство для автоматизированной погрузки-выгрузки поддонов (Патент US4844681A от 04.07.1989), содержащее удлинённую надстройку, поддерживающую узел с множеством зубьев, средства обнаружения, выравнивающие положение надстройки, средство соединения между надстройкой и грузоподъёмной платформой, содержащее шарнир и связанный с ним поперечный направляющий элемент, соединительные средства, обеспечивающие точное позиционирование поддонов.
Недостатками изобретения по патенту US4844681A являются:
использование гидравлического или пневматического устройства подъёма груза в транспортировщике в дополнение к цепному приводу существенно усложняет производство и эксплуатацию;
использование более 10 телескопических гидравлических домкратов подстройки под положение кузова существенно усложняет производство и эксплуатацию;
использование оптических датчиков существенно снижает возможность эксплуатации в условиях наличия пыли и снега.
Известно устройство для автоматизированной погрузки-выгрузки поддонов (Патент PL237745B1 от 22.08.2018), содержащее разгрузочную площадку, снабжённую цепными конвейерами, погрузочную площадку, оборудованную цепными конвейерами, пару вил, состоящих из двух плеч и расположенных между цепными конвейерами.
Недостатками изобретения по патенту PL237745B1 являются:
конструктивно-технологическая сложность изготовления, связанная с применением пневматических механизмов для подъёма груза транспортировщиком;
низкие эксплуатационные характеристики, связанные с увеличенной шириной сегментов транспортировщика и сопряжёнными с этим узкими зазорами, менее 20мм, между транспортировщиком и посадочными площадками европоддонов, что делает выгрузку невозможной, если тара отклоняется от идеальной линии ряда более чем на 20 мм;
повышенные требования к линиям электропередач из-за высокого потребления электроэнергии, как следствие, ряда инженерных недоработок, таких как:
○ больший радиус звёздочек цепного привода, связанный с этим,
○ увеличенный момент редуктора,
○ использование низкоэффективной передачи с КПД менее 80%;
позволяет работать только с рядами по три европоддона;
отсутствие учёта погодных условий;
подстройка высоты плоскости погрузчика к плоскости кузова осуществляется подъёмом всего грузовика, это требует дополнительной мощности системы погрузки, при этом замер уровня происходит на верхней части фургона, что невозможно при наличии там снега или льда;
использование оптических датчиков существенно снижает возможность эксплуатации в условиях наличия пыли и снега.
Цель изобретения - создание универсального устройства, которое позволит просто и эффективно осуществлять процесс погрузки-выгрузки максимум 33 европоддонов в транспортное средство, преимущественно еврофуру, без дополнительной подготовки кузова, используя стандартную электропроводку 380В, с учетом погодной специфики различных регионов Российской Федерации, на котором будет возможность расставлять поддоны, комбинируя по 2 и по 3 поддона в ряд, для достижения разрешенной развесовки по осям и оптимального количества тары, без внесения существенных изменений в строении складов.
Указанная цель достигается созданием устройства для автоматизированной погрузки-выгрузки поддонов, содержащим низкую несущую раму, транспортировщик, короткий и длинный конвейеры протяжки поддонов, механизм вертикального подстраивания к плоскости кузова, при этом устройство выполнено с возможностью погрузки по 2 и по 3 поддона в ряд.
Устройство для автоматизированной погрузки-выгрузки поддонов содержит, по меньшей мере, один электродвигатель.
Устройство для автоматизированной погрузки-выгрузки поддонов, в котором транспортировщик включает сегменты, соединённые между собой через общий приводной вал цепной передачи, каждый из которых содержит ролики, верхнюю и нижнюю части, подъёмные механизмы, механизмы, фиксирующие положение груза.
Устройство для автоматизированной погрузки-выгрузки поддонов содержит низкую несущую раму, транспортировщик, короткий и длинный конвейеры протяжки поддонов, механизм вертикального подстраивания к плоскости кузова, в котором транспортировщик включает сегменты, соединённые между собой через общий приводной вал цепной передачей, в котором каждый из сегментов содержит ролики, верхнюю и нижнюю части, подъёмные механизмы, механизмы, фиксирующие положение груза, электродвигатели.
Устройство для автоматизированной погрузки-выгрузки поддонов, содержащее электромеханический датчик измерения длины кузова, расположенный на транспортировщике.
Устройство для автоматизированной погрузки-выгрузки поддонов, в котором угол подъёма груза составляет менее 2°.
Устройство для автоматизированной погрузки-выгрузки поддонов, в котором радиус делительной окружности звёздочек цепного привода менее 120мм.
Устройство для автоматизированной погрузки-выгрузки поддонов, содержащее энергоэффективные электромоторы не ниже класса IE3.
Устройство для автоматизированной погрузки-выгрузки поддонов, содержащее энергоэффективные редукторы с КПД не менее 95%.
Устройство для автоматизированной погрузки-выгрузки поддонов, содержащее соосно расположенные электромоторы и редукторы.
Устройство для автоматизированной погрузки-выгрузки поддонов, содержащее прижимные валики.
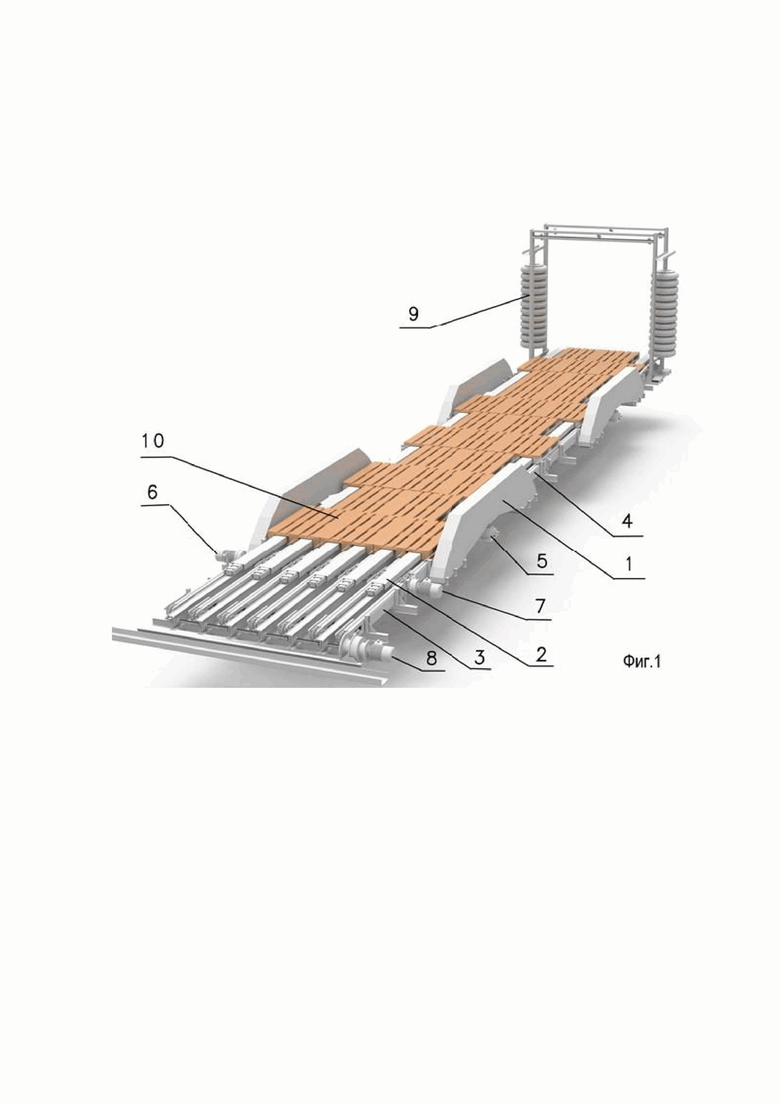
На фиг. 1 показано устройство для автоматизированной погрузки-выгрузки поддонов содержащее раму (1), транспортировщик (2), короткий конвейер протяжки поддонов (3) и длинный конвейер протяжки поддонов (4), механизм вертикального подстраивания к плоскости кузова (5), а также расположение электропривода короткого конвейера (6), электропривода длинного конвейера (7), электропривода транспортировщика (8). В конструкции погрузчика также могут быть предусмотрены прижимные валики (9), прижимающие груз, расположенный на поддонах (10) друг к другу.
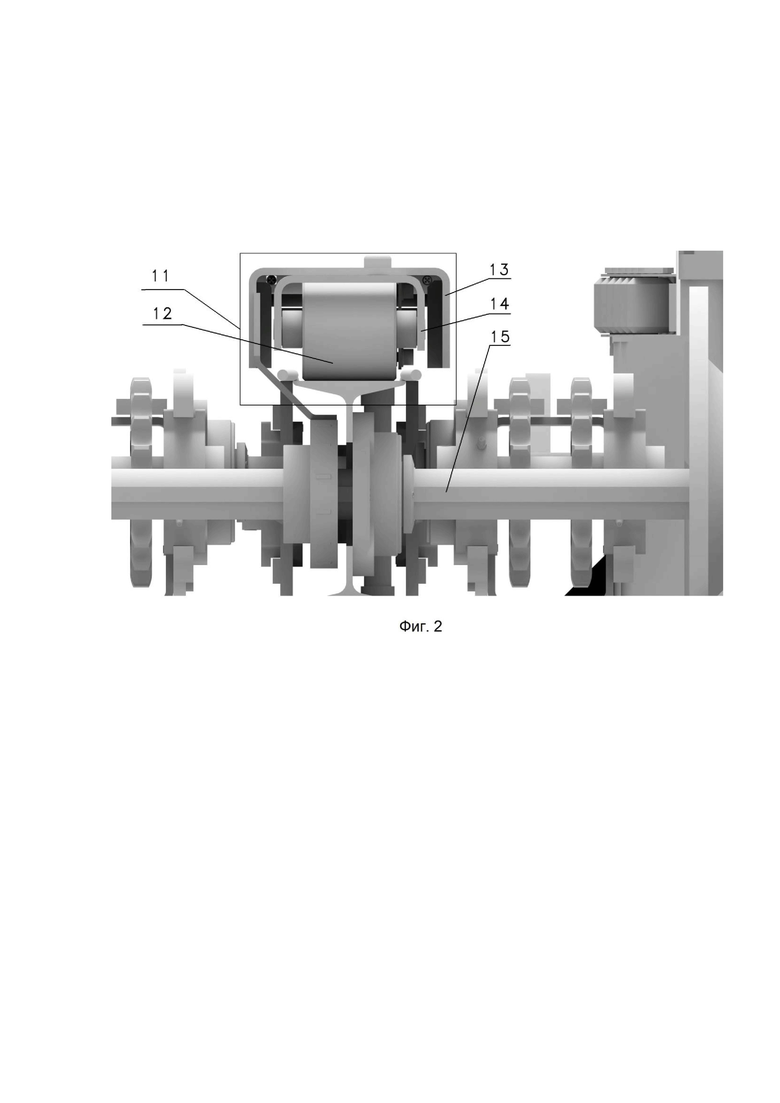
На фиг. 2 вид погрузчика с торца, показаны элементы сегмента (11), ролики (12), верхняя часть сегмента (13) и нижняя часть сегмента (14). Сегменты (11) соединены между собой общим приводным валом (15). Компоновка, в которой механическая связь отдельных частей транспортировщика осуществляется только через общий приводной вал (15), позволяет разместить на погрузчике поддоны с грузом в 2 и 3 ряда, что способствует достижению разрешенной развесовки по осям и размещению оптимального количества тары.
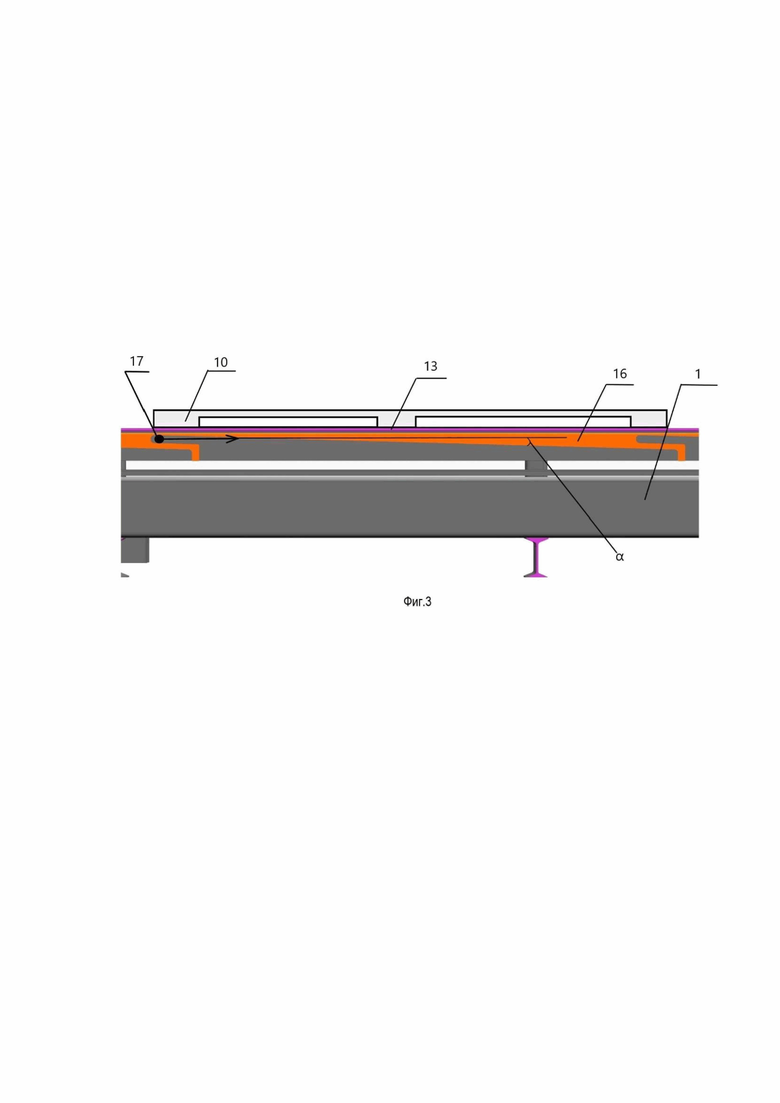
На фиг. 3 показан подъёмный механизм сегмента (11), который содержит клинья (16) и ролики (17). Перемещением роликов (17) в горизонтальном направлении по наклонной поверхности клиньев (16) осуществляется смещение клиньев (16) по вертикали. На клинья (16) опирается верхняя часть сегмента (13) транспортировщика (2), на которой размещены поддоны (10) с грузом. Если ролики (17) находятся в крайнем левом положении, то клинья (16) расположены в самой нижней точке, а поддоны с грузом (10) размещены на поверхности грузового транспортного средства или на конвейере протяжки поддонов. При горизонтальном перемещении роликов (17) вправо, клинья (16) приподнимают поддоны с грузом (10) с поверхности грузового транспортного средства для последующего перемещения их из кузова транспортного средства. Угол подъёма груза α между горизонтальной линией, по которой перемещается ролик (17), и наклонной поверхностью клина (16) составляет менее 2 градусов, в результате чего требуется меньшая сила подъёма груза, расположенного на поддонах (10), и, соответственно, электродвигатели меньшей мощности, что ведёт к снижению электропотребления.
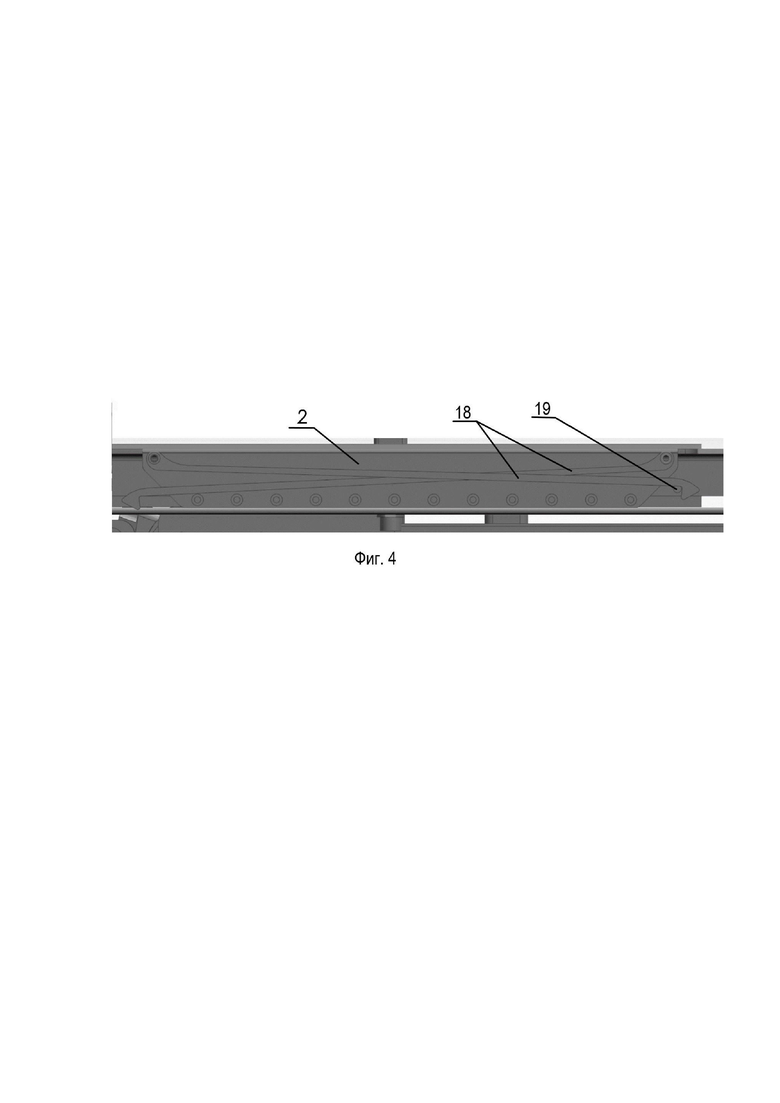
На фиг. 4 показан механизм, фиксирующий положение транспортировщика, включающий фиксаторы транспортировщика (18), которые в крайних позициях цепляются за упор (19) и фиксируют транспортировщик (2) в одном из положений: верхнее или нижнее.
Устройство автоматизированной погрузки-выгрузки поддонов работает следующим образом:
Процесс автоматической работы устройства для этапа погрузки поддонов в еврофуру.
Вилочный погрузчик или вспомогательные конвейеры размещают поддоны (10) с грузом на короткий конвейер (3) транспортировщика (2) в соответствии со схемой погрузки по 2 или по 3 поддона в ряд. Возможна погрузка одновременно по 2 паллеты лёгких грузов вилочным погрузчиком с удлинёнными вилами. Система распознавания определяет количество поддонов (10) в ряду, 2 или 3 штуки, и количество рядов. После того как ряд поддонов (10) заполнен, происходит их выравнивание в одну линию смещением короткого конвейера (3) назад до упора в заднюю стенку. После выравнивания, электродвигателем (6) приводится в движение цепной механизм короткого конвейера (3), который перемещает поддоны (10) к длинному конвейеру (4). Длинный конвейер (4) приводится в действие электродвигателем (7) и протягивает поддоны (10) в зону экспедиции до тех пор, пока зона экспедиции не заполнится необходимым количеством рядов на погрузку. Механизм вертикального подстраивания к плоскости кузова (5) регулирует высоту рамы (1), выравнивая положение рамы с положением кузова еврофуры. Транспортировщик (2), приводимый в движение электродвигателем (8), посредством общего приводного вала (15) и подъёмного механизма сегмента (11), показанного на фиг.3 поднимает поддоны (10) с грузом, фиксирует своё положение с помощью механизма фиксации изображенного на фиг.4 и перемещается в еврофуру до достижения передней стенки, ставит поддоны на пол еврофуры и выезжает на исходную позицию.
Процесс автоматической работы устройства для этапа выгрузки поддонов с грузом из еврофуры.
Еврофура размещается в зоне выгрузки поддонов. Электромеханический датчик безопасности, расположенный на раме (2), передаёт сигнал о том, что фура находится в зоне выгрузки. Механизм вертикального подстраивания к плоскости кузова (5) регулирует высоту рамы (1), выравнивая высоту поверхности устройства с полом еврофуры. Транспортировщик (2) заезжает под поддоны в кузове еврофуры до достижения передней стенки кузова, поднимает поддоны (10) с грузом, выезжает на исходную позицию и ставит поддоны на длинный конвейер (4). Длинный конвейер (4) перемещает поддоны (10) с грузом на короткий конвейер. С короткого конвейера (4) вилочные погрузчики или вспомогательные конвейеры забирают поддоны для их размещения на складе.
Таким образом, разработанная конструкция погрузчика имеет ряд значительных преимуществ, а также несколько возможных исполнений, а именно:
максимально упрощён состав конструктивных решений и процесс производства, исключены высокоточные технологические операции, предусмотрена высокая ремонтопригодность;
части транспортировщика связаны между собой только через приводной вал цепной передачи, как это показано на фиг. 2, благодаря этому становится возможна погрузка по 2 и по 3 поддона в ряд, как это показано на рис.1;
перемещение груза по вертикали осуществляется посредством горизонтального перемещения роликов по клиньям;
за счет применения более узких сегментов транспортировщика увеличен зазор между транспортировщиком и посадочными площадками европоддонов, что позволяет допускать смещения европоддонов при транспортировке более 20мм;
конструктивные решения позволяют снизить требования к линиям электропередач. К ним относятся:
уменьшенный угол подъёма груза, менее 2°,
использование подшипников скольжения на осях при подъёме груза с коэффициентом трения менее 0,008,
уменьшенный радиус делительной окружности звёздочек цепного привода, менее 120мм,
применение энергоэффективных редукторов с КПД не ниже 95%,
применение соосных энергоэффективных электромоторов не ниже класса IE3;
подстройка уровня плоскости устройства к уровню кузова осуществляется с помощью подъёма устройства механизмом вертикального подстраивания к плоскости кузова на основании показаний датчиков;
контроль положения поддонов груза и расстояния между передней стенкой кузова и тарой груза осуществляется с помощью датчиков;
датчики, необходимые для подстройки уровня плоскости устройства к плоскости кузова находятся внутри устройства, что исключает влияние погодных условий на работоспособность;
возможность размещения как двух, так и трёх европоддонов в ряд, что позволяет выполнять требования законодательства по развесовке по осям;
применяемые в конструкции материалы и смазки, а также расположение всех механизмов в помещении склада, гарантируют надёжную эксплуатацию устройства погрузки-выгрузки во всех регионах Российской Федерации;
устройство состоит из металлической рамы, на которой смонтированы металлические двутавры и стальные квадратные трубы прямоугольного сечения;
все используемые в конструкции двутавры, швеллеры, стальные квадратные трубы, валы устройства представляют собой стандартный (ГОСТ) металлопрокат отечественного производства;
двутавры представляют собой элемент несущей конструкции и направляющие для роликов транспортировщика, для обеспечения его устойчивости при движении на двутавры зафиксированы борта из прутка в качестве направляющих ограничителей;
стальные квадратные трубы прямоугольного сечения представляют собой элемент несущей конструкции и включают короткий и длинный конвейеры цепной протяжки поддонов, снабжённые скользящими основаниями;
длинный конвейер протяжки поддонов служит для формирования зоны экспедиции без зазоров между поддонами;
транспортировщик выполняет подъём сформированного груза экспедиции и его транспортировку в фургон, либо подъём груза в фургоне и его транспортировку на раму при помощи цепного привода;
рама располагает необходимыми датчиками и подъёмными механизмами, позволяющими подстраивать плоскость устройства к плоскости кузова как в ручном, так и в автоматическом режиме;
транспортировщик оснащен датчиками, обеспечивающими точное расстояние от первого ряда груза до передней стенки фургона, погрузка и выгрузка происходят как в ручном, так и в автоматическом режиме;
транспортировщик снабжён фиксаторами положения: верхнее / нижнее, призванными обеспечить надёжность перемещения груза;
в непосредственной близости от окна погрузки располагается зона, в которой европоддоны и груз на них прижимаются друг к другу специальными прижимными валиками, призванными исключить коллизию груза с бортами еврофуры при погрузке.
| название | год | авторы | номер документа |
|---|---|---|---|
| Самосвал с трёхсторонним опрокидыванием кузова | 2018 |
|
RU2710954C1 |
| Самосвал с поворотной конструкцией подъёмного механизма для опрокидывания кузова на левый, правый и задний борта | 2019 |
|
RU2710960C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЗИРОВАННОЙ ЗАГРУЗКИ ГРУЗОНОСИТЕЛЯ ПОГРУЗОЧНЫМИ ЕДИНИЦАМИ, ОБРАЗУЮЩИМИ ШТАБЕЛЬ ГРУЗА, И СПОСОБ ПОГРУЗКИ | 2021 |
|
RU2763077C1 |
| Авиатранспортируемый самовыгружающийся погрузчик паллет и контейнеров | 2017 |
|
RU2660198C1 |
| Вагон для пакетированных грузов | 1988 |
|
SU1684200A1 |
| Мультиагентный робототехнический поисково-спасательный комплекс | 2021 |
|
RU2773987C1 |
| УСТРОЙСТВО ДЛЯ ПОГРУЗКИ И ВЫГРУЗКИ ГРУЗОВ ИЗ ТРАНСПОРТНЫХ СРЕДСТВ | 2007 |
|
RU2333879C1 |
| ПОГРУЗЧИК-ТРАНСПОРТИРОВЩИК РУЛОНОВ СЕНОСОЛОМИСТЫХ МАТЕРИАЛОВ | 2015 |
|
RU2580163C1 |
| Погрузочно-разгрузочная станция для грузовых автомобилей и контейнеров | 1988 |
|
SU1685262A3 |
| Устройство для загрузки изделий в тару | 1990 |
|
SU1724519A1 |
Изобретение относится к погрузочно-разгрузочной технике. Устройство автоматизированной погрузки-выгрузки поддонов содержит раму. На раме установлен транспортировщик, короткий и длинный конвейеры протяжки поддонов, электропривод для каждого конвейера и механизм вертикального подстраивания к плоскости кузова. Короткий конвейер содержит цепной механизм, который перемещает поддоны к длинному конвейеру. Механизм подстраивания выполнен с возможностью погрузки по 2 и по 3 поддона в ряд. Транспортировщик включает сегменты, по меньшей мере, один электродвигатель, электромеханический датчик длины кузова. Сегменты соединены между собой через общий приводной вал цепной передачей. Каждый из сегментов содержит ролики, верхнюю часть и нижнюю часть, подъёмные механизмы, механизмы, фиксирующие положение груза, а угол подъёма груза составляет менее 2°. Достигается упрощение конструкции и возможность погрузки по 2 и по 3 поддона в ряд. 3 н. и 9 з.п. ф-лы, 4 ил.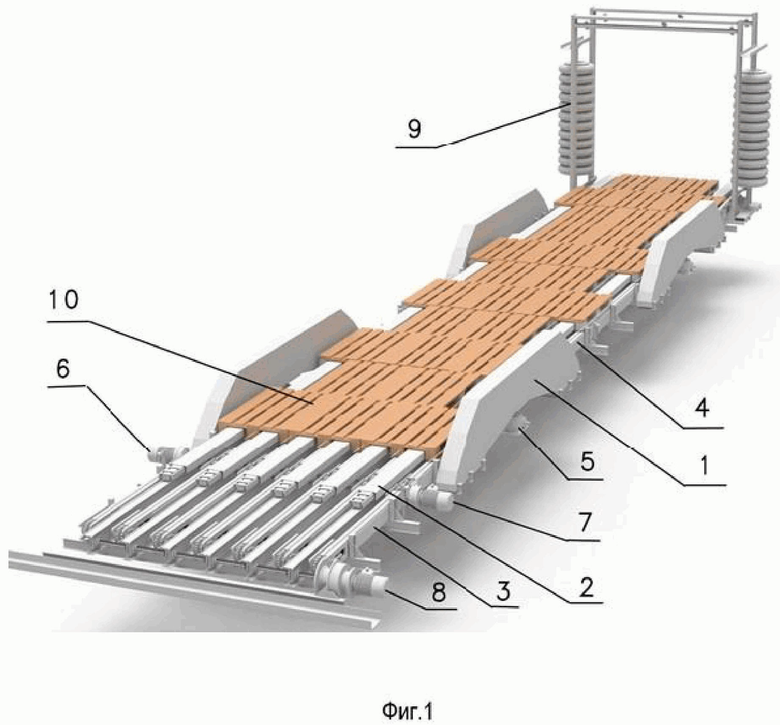
1. Устройство автоматизированной погрузки-выгрузки поддонов, содержащее раму, на которой установлены транспортировщик, короткий конвейер протяжки поддонов для выравнивания в одну линию поддонов смещением назад до упора в заднюю стенку, содержащий цепной механизм, который перемещает поддоны к длинному конвейеру, длинный конвейер протяжки поддонов, перемещающий поддоны в зону экспедиции, электропривод для каждого конвейера, механизм вертикального подстраивания к плоскости кузова, выравнивающий положение рамы с положением кузова, выполненный с возможностью погрузки по 2 и по 3 поддона в ряд.
2. Устройство автоматизированной погрузки-выгрузки поддонов по п. 1, содержащее, по меньшей мере, один электродвигатель.
3. Устройство автоматизированной погрузки-выгрузки поддонов по п. 1, отличающееся тем, что транспортировщик включает сегменты, соединённые между собой через общий приводной вал цепной передачей, при этом каждый из сегментов содержит ролики, верхнюю часть сегмента и нижнюю часть сегмента, подъёмный механизм и механизм, фиксирующий положение груза.
4. Устройство автоматизированной погрузки-выгрузки поддонов, содержащее раму, на которой установлены транспортировщик, короткий конвейер протяжки поддонов для выравнивания в одну линию поддонов смещением назад до упора в заднюю стенку, содержащий цепной механизм, который перемещает поддоны к длинному конвейеру, длинный конвейер протяжки поддонов, перемещающий поддоны в зону экспедиции, электропривод для каждого конвейера, механизм вертикального подстраивания к плоскости кузова, выравнивающий положение рамы с положением кузова, в котором транспортировщик включает сегменты, соединённые между собой через общий приводной вал цепной передачей, по меньшей мере, один электродвигатель, в котором каждый из сегментов содержит ролики, верхнюю часть и нижнюю часть, подъёмные механизмы, механизмы, фиксирующие положение груза.
5. Устройство автоматизированной погрузки-выгрузки поддонов по п. 1 или 4, отличающееся тем, что содержит электромеханический датчик длины кузова, расположенный непосредственно в транспортировщике.
6. Устройство автоматизированной погрузки-выгрузки поддонов по п. 1 или 4, отличающееся тем, что угол подъёма груза составляет менее 2°.
7. Устройство автоматизированной погрузки-выгрузки поддонов, содержащее раму, на которой установлены транспортировщик, короткий конвейер протяжки поддонов для выравнивания в одну линию поддонов смещением назад до упора в заднюю стенку, содержащий цепной механизм, который перемещает поддоны к длинному конвейеру, длинный конвейер протяжки поддонов, перемещающий поддоны в зону экспедиции, электропривод для каждого конвейера, механизм вертикального подстраивания к плоскости кузова, выравнивающий положение рамы с положением кузова, в котором транспортировщик включает сегменты, соединённые между собой через общий приводной вал цепной передачей, по меньшей мере один электродвигатель, электромеханический датчик длины кузова, при этом каждый из сегментов содержит ролики, верхнюю и нижнюю части сегмента, подъёмные механизмы, механизмы, фиксирующие положение груза, а угол подъёма груза составляет менее 2°.
8. Устройство автоматизированной погрузки-выгрузки поддонов по любому из пп. 1, 4 или 7, отличающееся тем, что диаметр делительной окружности звёздочек цепного привода менее 120 мм.
9. Устройство автоматизированной погрузки-выгрузки поддонов по любому из пп. 1, 4 или 7, отличающееся тем, что содержит энергоэффективные электромоторы не ниже класса IE3.
10. Устройство автоматизированной погрузки-выгрузки поддонов по любому из пп. 1, 4 или 7, отличающееся тем, что содержит энергоэффективные редукторы с КПД не менее 95%.
11. Устройство автоматизированной погрузки-выгрузки поддонов по любому из пп. 1, 4 или 7, отличающееся тем, что содержит соосно расположенные электромоторы и редукторы.
12. Устройство автоматизированной погрузки-выгрузки поддонов по любому из пп. 1, 4 или 7, отличающееся тем, что содержит прижимные валики.
| US 4844681 A, 04.07.1989 | |||
| Погрузочно-разгрузочная станция для грузовых автомобилей и контейнеров | 1988 |
|
SU1685262A3 |
| US 5186596 A, 16.02.1993 | |||
| EP 0668225 B1, 21.01.1998 | |||
| Установка для рассортировки отработанной шаровой загрузки мельниц | 1960 |
|
SU135840A1 |
