[001] По настоящей заявке испрашивается приоритет предварительной заявки США № 62/858,330, зарегистрированной 7 июня 2019 года, раскрытие которой явно включено по ссылке в данный документ в своей полноте.
Область техники, к которой относится изобретение
[002] Аспект описания изобретения здесь относится к летательному аппарату, в частности летательному аппарату, который координирует поддерживающий трос и стабилизацию создающего тягу устройства. Другие аспекты также описываются.
Уровень техники
[003] Авиаэлектроника извлекла значительную пользу из последних инноваций в аккумуляторных батареях и миниатюризации сложных электронных схем, таких как процессоры. Одним сегментом в области техники, который развился больше всех, как среди любителей, так и профессионального использования, является сегмент малогабаритных беспилотных летательных аппаратов, широко известных как дроны. Эта новейшая технология обнаружила творческие применения во множестве областей, таких как фотография, военная сфера, охрана живой природы и строительство.
[004] Остаются связанные с развитием проблемы в технологии дронов, которые все еще необходимо преодолеть, в то время как будущие применения разрабатываются и исследуются. Например, расстояние движения дронов продолжает подразумевать компромиссы между такими факторами как размер, стоимость аккумуляторной батареи и создание шума. Эти соображения являются важными в применениях, которые могут иметь дроны, осуществляющие навигацию в плотных городских окружениях или несущие тяжелые грузы на большие расстояния, такие как доставка посылок. Эти факторы особенно уместны, когда приходится убеждать регулирующие органы о том, что разработанные системы являются жизнеспособными и безопасными. Традиционные решения продолжают фокусироваться на урегулировании компромиссов между расстоянием, размером и маневренностью.
Сущность изобретения
[005] Аспект настоящего изобретения относится к летательному аппарату, в котором тяговая способность была увеличена посредством поддерживающего троса, соединенного с летательным аппаратом. Подвесная система летательного аппарата со стабилизацией создающего тягу устройства предоставляет универсальное решение для текущих проблем в области дронов, которое уменьшает зону охвата и предлагает другие преимущества, такие как продолжительное время полета и более высокая грузоподъемность по сравнению с традиционными предложениями дронов.
[006] В варианте осуществления поддерживающий трос присоединяется к точке весовой нагрузки на летательном аппарате. Поддерживающий трос может быть выполнен, чтобы иметь возможность поддерживать вес летательного аппарата и распределять вес летательного аппарата на «заземленную» якорную точку, расположенную за пределами летательного аппарата. Например, поддерживающий трос может соединяться с системой лебедки, которая приспособлена для сматывания поддерживающего троса, таким образом, увеличивая натяжение в поддерживающем тросе и потенциально притягивая летательный аппарат по направлению к системе лебедки.
[007] Летательный аппарат может иметь форму направленного создания тяги, такую как воздушные винты. Например, летательный аппарат может иметь конфигурацию «квадрокоптера». Контроллер может быть приспособлен манипулировать местоположением летательного аппарата посредством скоординированного действия системы лебедки, которая сматывает или выпускает поддерживающий трос, и создающих тягу устройств, которые могут изменять величину создаваемого усилия и угол создаваемой тяги относительно поддерживающего троса. Эта координация предоставляет возможность контроллеру оптимизировать вывод энергии, необходимой для перемещения или поддержания позиции летательного аппарата, поскольку тяга, которая может быть необходима для противодействия силе тяжести, может вместо этого быть смещена посредством поддерживающего троса. Если меньшее выходное усилие необходимо от создающих тягу устройств, тогда размер создающих тягу устройств может быть уменьшен, также как поддерживающие конструкции, такие как аккумуляторы, в то время как летательный аппарат может сохранять равные или большие возможности в таких областях как время полета и грузоподъемность. Меньшие создающие тягу устройства и поддерживающие конструкции в летательном аппарате обеспечивают летательный аппарат меньшей зоной охвата и шумовым профилем, увеличивая маневренность летательного аппарата.
[008] Координация между системой лебедки и создающими тягу устройствами предоставляет возможность других преимуществ. Например, вследствие способности поддерживающего троса уклоняться от необходимости для создающего тягу устройства противостоять окружающим усилиям, таким как сила тяжести или ветровая нагрузка, создающие тягу устройства могут быть использованы для эффективной ориентации воздушных транспортных средств. Например, летательный аппарат может сохранять неподвижную позицию, в то же время ориентируясь перпендикулярно направлению силы тяжести, максимизируя натяжение в поддерживающем тросе.
[009] В варианте осуществления летательный аппарат может быть соединен с другим транспортным средством поддерживающим тросом. Например, транспортное средство может быть летательным аппаратом в конфигурации «корабля-носителя», которая предоставляет возможность кораблю-носителю нести, по меньшей мере, долю веса летательного аппарата. Корабль-носитель может иметь характеристики, которые улучшают эффективность полета длительной продолжительности, предоставляя системе преимущества крупногабаритного летательного аппарата, в то же время сохраняя доступность, которую предоставляет небольшой летательный аппарат.
[0010] Система может быть выполнена для конкретной функциональности. Например, летательный аппарат может быть приспособлен для прикрепления полезных грузов, очистки удаленных поверхностей, обезвреживания боеприпасов или любых различных функций, которые позволяются посредством преимуществ, предоставляемых системой.
Краткое описание чертежей
[0011] Фиг. 1 иллюстрирует примерную подвесную систему летательного аппарата со стабилизацией создающего тягу устройства;
[0012] Фиг. 2 иллюстрирует примерную подвесную систему летательного аппарата со стабилизацией создающего тягу устройства, которая присоединяется к внешней поверхности;
[0013] Фиг. 3A-3C иллюстрируют примерные конфигурации подвесной системы летательного аппарата со стабилизацией создающего тягу устройства;
[0014] Фиг. 4A-C иллюстрирует примерные конфигурации подвесной системы летательного аппарата со стабилизацией создающего тягу устройства относительно неподвижной области;
[0015] Фиг. 5 иллюстрирует примерную конфигурацию множества подвесных систем воздушных транспортных средств со стабилизацией создающего тягу устройства относительно неподвижной области;
[0016] Фиг. 6 иллюстрирует примерную конфигурацию подвесной системы летательного аппарата со стабилизацией создающего тягу устройства, которая прикрепляется к системе, которая приспособлена для поступательного перемещения местоположения якорной точки;
[0017] Фиг. 7 иллюстрирует позиции подвесной системы летательного аппарата со стабилизацией тяги на примерной траектории полета;
[0018] Фиг. 8 иллюстрирует примерную конфигурацию подвесной системы летательного аппарата со стабилизацией создающего тягу устройства, которая включает в себя корабль-носитель;
[0019] Фиг. 9 иллюстрирует примерную конфигурацию подвесной системы летательного аппарата со стабилизацией создающего тягу устройства, которая включает в себя множество воздушных транспортных средств, соединенных с кораблем-носителем;
[0020] Фиг. 10 иллюстрирует примерную подвесную систему летательного аппарата со стабилизацией создающего тягу устройства, в то время как корабль-носитель находится в схеме полета в зоне ожидания;
[0021] Фиг. 11 иллюстрирует примерную конфигурацию подвесной системы летательного аппарата со стабилизацией создающего тягу устройства с множеством кораблей-носителей;
[0022] Фиг. 12 иллюстрирует примерный схематичный чертеж электронных компонентов подвесной системы летательного аппарата со стабилизацией создающего тягу устройства;
[0023] Фиг. 13 иллюстрирует примерный способ работы подвесной системы летательного аппарата со стабилизацией создающего тягу устройства;
[0024] Фиг. 14 иллюстрирует примерную конфигурацию подвесной системы летательного аппарата со стабилизацией создающего тягу устройства с присоединением полезного груза;
[0025] Фиг. 15 иллюстрирует примерную конфигурацию подвесной системы летательного аппарата со стабилизацией создающего тягу устройства с конкретным функциональным использованием;
[0026] Фиг. 16 иллюстрирует примерную конфигурацию подвесной системы летательного аппарата со стабилизацией создающего тягу устройства во время очистки системы фотогальванических батарей;
[0027] Фиг. 17 иллюстрирует примерный способ переноса полезного груза подвесной системы летательного аппарата со стабилизацией создающего тягу устройства; и
[0028] Фиг. 18 иллюстрирует примерную подвесную систему летательного аппарата со стабилизацией создающего тягу устройства во время переноса полезного груза.
[0029] Несколько аспектов изобретения здесь иллюстрируются в качестве примера, а не в качестве ограничения на фигурах сопровождающих чертежей, на которых одинаковые ссылки указывают аналогичные элементы. Следует отметить, что ссылки на «an» или «один» аспект этого изобретения необязательно относятся к одному и тому же аспекту, и они означают, по меньшей мере, один. Также, в интересах краткости и уменьшения общего числа чертежей, данный чертеж может быть использован для иллюстрации признаков более чем одного аспекта изобретения, и не все элементы на чертеже могут быть востребованы для данного аспекта.
Подробное описание изобретения
[0030] Несколько аспектов изобретения со ссылкой на прилагаемые чертежи теперь объясняются. Всякий раз, когда формы, относительные позиции и другие аспекты описанных частей явно не определяются, рамки изобретения не ограничиваются только показанными частями, которые предназначены просто с целью иллюстрации. Также, в то время как многочисленные детали излагаются, понятно, что некоторые аспекты изобретения могут быть применены на практике без этих деталей. В других случаях, хорошо известные схемы, структуры и технологии подробно не показаны, с тем, чтобы не затруднять понимание этого описания.
[0031] Варианты осуществления настоящего изобретения направлены, среди прочего, на подвесную систему летательного аппарата со стабилизированным создающим тягу устройством. Подвесная система летательного аппарата со стабилизированным создающим тягу устройством может включать в себя летательный аппарат, который соединяется с поддерживающим тросом, при этом поддерживающий трос может быть закреплен удаленно в якорной точке. В примерном варианте осуществления система летательного аппарата может включать в себя беспилотный летательный аппарат (UAV), который прикрепляется к поддерживающему тросу, который соединяет UAV с якорной точкой, так что первый конец поддерживающего троса соединяется с UAV. Хотя настоящее изобретение обсуждает применения, где нет пилота-человека на борту летательного аппарата, является возможным то, что в аспектах настоящего изобретения летательный аппарат может иметь пилота или пользователя-человека на борту без отступления от идеи изобретения. Якорная точка может включать в себя систему лебедки, которая может функционально изменять длину поддерживающего троса, или троса лебедки, который разворачивается. Якорная точка, к которой система лебедки прикрепляется, может изменяться в зависимости от применения. Например, якорная точка может быть устойчивой поверхностью, такой как крыша здания, или подвижной поверхностью, такой как второй летательный аппарат.
[0032] Предоставление вертикальной подъемной силы для UAV в форме системы лебедки увеличивает желательные характеристики UAV, чтобы делать его идеальным решением для применений в широком диапазоне, в то же время устраняя некоторые базовые недостатки множества UAV. Система лебедки предоставляет возможность уменьшенного потребления энергии посредством UAV, поскольку величина тяги, которую UAV должен создавать, чтобы поддерживать желаемый подъем, уменьшается или устраняется. Зона охвата самого UAV может также быть уменьшена, например, посредством уменьшения размера создающего тягу устройства, необходимого для создания достаточного подъема, и посредством снятия нагрузки с компонентов UAV, таких как аккумуляторная батарея или контроллер, которые являются неотъемлемыми и могут быть присоединены через поддерживающий трос. Кроме того, поскольку UAV не должен быть полностью самоподдерживающимся в вертикальном направлении, доступная тяга/мощность по другим осям (управление по горизонтали и угловым пространственным положением) значительно увеличивается.
[0033] Дополнительно, универсальность системы, которая может предусматривать различные типы якорных точек и функциональных возможностей UAV, предоставляет возможность для множества применений. Например, система лебедки может предоставлять возможность UAV создавать тягу в нетрадиционных направлениях. Когда UAV активно подвешивается посредством системы лебедки, может не быть необходимым, чтобы создающие тягу устройства на UAV предоставляли подъемную силу для того, чтобы поддерживать поднятие UAV. Создающие тягу устройства могут быть использованы для предоставления усилия в направлении, перпендикулярном силе тяжести. Например, если UAV имел задачу размещения переводных рисунков в указанной точке размещения на внешнем окне высотного здания, система лебедки может быть закреплена выше точки размещения. С помощью системы лебедки, поддерживающей UAV на желаемой высоте, создающие тягу устройства на UAV могут создавать тяговое усилие, нацеленное на окно, которого достаточно для приклеивания переводного рисунка на окно. Кроме того, система лебедки может динамически регулировать длину поддерживающего троса для того, чтобы предоставлять возможность движения UAV в плоскости, ортогональной силе тяжести.
[0034] UAV может быть выполнен, чтобы выполнять услуги, позволяемые способностью UAV эффективно осуществлять навигацию в ограниченном воздушном пространстве. Например, UAV может быть приспособлен для доставки посылок на балкон, потенциально обходя свес крыши и конструктивное ограждение. Эта способность предоставляет возможность UAV выполнять доставки в плотные в иных случаях и ограниченные городские окружения. Примеры посылок, которые могут быть доставлены таким средством, включают в себя потребительские товары из большого розничного магазина, распределительного центра или промежуточного пункта, такие как книги, одежда или электронные товары. Другие примеры могут включать в себя двухточечные доставки, например, продуктов питания, медицинского оборудования и лекарств. Эти примеры являются неограничивающими, поскольку является возможным, что UAV может быть приспособлен для захвата и доставки любого груза, который помещается в пороговые пределы развернутого размера и веса, достижимые системой.
[0035] В данном документе выражения «беспилотный летательный аппарат» и «UAV» ссылаются на автономное или полуавтономное транспортное средство, которое приспособлено для выполнения некоторых функций без физически присутствующего пилота-человека. Примеры связанных с полетом функций могут включать в себя, но не только, восприятие своего окружения или работу в воздухе без необходимости входных данных от оператора, среди прочего.
[0036] UAV может быть автономным или полуавтономным. Например, некоторые функции могут управляться удаленным оператором-человеком, в то время как другие функции выполняются автономно. Дополнительно, UAV может быть выполнен, чтобы предоставлять возможность удаленному оператору принимать на себя функции, которые могут в ином случае управляться автономно посредством UAV. Кроме того, данный тип функции может управляться дистанционно на одном уровне абстракции и выполняться автономно на другом уровне абстракции. Например, удаленный оператор может управлять решениями по навигации высокого уровня для UAV, например, указывая, что UAV должен изменять местоположения, в то время как навигационная система UAV автономно управляет более тонкими решениями навигации, такими как выбор маршрута, избегание препятствия и т.д. Другие примеры также являются возможными.
[0037] UAV может быть различных форм. Например, UAV может принимать форму винтокрылого летательного аппарата, такого как вертолет или мультикоптер, летательный аппарат с неподвижным крылом, реактивный летательный аппарат, летательный аппарат с туннельным винтом, дирижабль легче воздуха, такой как полужесткий дирижабль или управляемый воздушный шар, летательный аппарат, приземляющийся на хвостовое оперение, планирующий летательный аппарат и/или орнитоптер, среди других возможностей. Дополнительно, термины «дрон», «система беспилотного летательного аппарата» («UAVS») или «беспилотный авиационный комплекс» («UAS») могут также быть использованы для ссылки на UAV.
[0038] Фиг. 1 иллюстрирует примерный аспект подвесной системы летательного аппарата со стабилизированным создающим тягу устройством, в данном документе называемой подвесной системой летательного аппарата. Подвесная система летательного аппарата может включать в себя UAV 104 и поддерживающий трос 107. В этой иллюстрации UAV 104 принимает форму мультикоптера, который включает в себя узел 105 создающего тягу устройства, который использует четыре винта 109, хотя другие примеры возможны с пятью или более винтами, меньше чем с четырьмя винтами, также как сочетания винтов и актуаторов, используемых для регулировки тяги винта относительно винтокрылого летательного аппарата. Как обсуждалось ранее, является возможным, что UAV 104 может принимать форму летательного аппарата, который не полагается, или не полагается исключительно, на винты для формирования тяги. Например, UAV 104 может содержать создающие тягу устройства, которые являются направленно ориентируемыми. Создающие тягу устройства могут быть соединены с баком или шлангом, приспособленным для снабжения создающих тягу устройств материалами, которые выпускаются из создающего тягу устройства для предоставления усилия. Некоторыми примерами являются создающие тягу устройства газового типа, химические виды топлива и вентиляторы направленного воздушного потока. Также считается, что UAV 104 может использовать моторы сжигающего типа, для создания тяги. Возможно представить себе другие примеры создающих тягу устройств, приспособленных для создания направленно сфокусированного продвижения без отклонения от идеи изобретения. Таким образом, в то время как узел 105 создающего тягу устройства демонстрирует вариант осуществления настоящего изобретения, термины «создающие тягу устройства» и «тяговый двигатель», используемые в данном документе, могут ссылаться на любую форму направленно ориентированной системы для создания тяги, известной в области техники.
[0039] UAV 104 может иметь способности маневрирования, так что наклон относительно поперечной оси, продольной оси, вертикальной оси и угловое пространственное положение UAV 104 могут регулироваться различными средствами. Например, винты 109 обеспечивают продвижение и маневренность для UAV 104. Более конкретно, каждый винт 109 включает в себя лопасти 111, которые прикрепляются к винту. Выполненные таким образом винты 109 могут предоставлять возможность UAV 104 взлетать и приземляться вертикально, маневрировать в любом направлении и/или зависать. Кроме того, шаг лопастей 111 может регулироваться группой и/или дифференциально и может предоставлять возможность UAV 104 выполнять трехмерные воздушные маневры, такие как зависание в перевернутом состоянии, полет с постоянно опущенной хвостовой частью «тик-ток», петли, петли с пируэтами, повороты по вертикали с пируэтом, пролет «на ноже», полупетля, шлепок и перевороты через крыло в движении, среди прочего. Когда шаг всех лопастей 111 регулируется, чтобы выполнять такое воздушное маневрирование, это может называться регулированием «общего шага» UAV 104. Дополнительно или альтернативно, UAV 104 может регулировать скорость вращения винтов 109, совокупно или дифференциально, для маневрирования. Например, посредством поддержания постоянной скорости трех винтов 109 и уменьшения скорости четвертого винта UAV 104 может наклоняться относительно продольной оси вправо, наклоняться относительно продольной оси влево, наклоняться относительно поперечной оси вперед или наклоняться относительно поперечной оси назад, в зависимости от винта 109, который выбирается для уменьшения скорости. В частности, UAV 104 может наклоняться относительно продольной оси в направлении винта 109 с уменьшенной скоростью. В качестве другого примера, увеличение или уменьшение скорости всех винтов 109 одновременно может приводить в результате к тому, что UAV 104 увеличивает или уменьшает свою высоту, соответственно. В качестве еще одного примера, увеличение или уменьшение скорости винтов 109, которые вращаются в одинаковом направлении, может приводить в результате к тому, что UAV 104 выполняет движение вокруг вертикальной оси влево или движение вокруг вертикальной оси вправо. Это лишь несколько примеров различных типов движения, которое может выполняться посредством независимой или совместной регулировки числа оборотов в минуту и/или направления, в котором винты 109 вращаются. Аналогичное маневрирование может рассматриваться в варианте осуществления, который не использует винты для тяги.
[0040] UAV 104 может также включать в себя кожух 112. Кожух 112 может содержать и/или соединять винты 109 и содержать другие необходимые или желательные компоненты, например, моторы, управляющую электронику, такую как инерциальный измерительный блок (IMU) и/или электронный контроллер скорости, аккумуляторы, другие датчики и/или полезную нагрузку, среди других возможностей. Показанный UAV 104 включает в себя два кожуха 112, при этом каждый кожух 112 конфигурируется, чтобы содержать два винта 109, и кожухи 112 соединяются осью 117. Однако, предполагается, что единственный кожух 112 может содержать все винты 109 UAV 104. Альтернативно, три или более кожуха 112 могут быть использованы, при этом каждый кожух 112 содержит, по меньшей мере, один винт 109, и при этом каждый кожух 112 соединяется таким образом, чтобы формировать часть UAV 104.
[0041] Ось 117 может предоставлять возможность независимого вращения для каждого кожуха 112, соединенного с осью 117 так, что первый кожух на ближнем конце оси 117 может вращаться в первом направлении, а второй кожух на дальнем конце оси 117 может вращаться во втором направлении. Дополнительно, ось 117 может предоставлять возможность первому кожуху вращаться в том же направлении, но до другой степени или с другой скоростью по сравнению с тем, как вращается второй кожух. Ось 117 может также предоставлять возможность первому кожуху оставаться в статической ориентации, в то время как второй кожух может вращаться относительно первого кожуха. В некоторых вариантах осуществления UAV 104 может использовать множество осей 117. Например, оси могут быть соединены ортогонально, при этом каждая ось приспособлена вращаться независимо от других осей, так что винты, соединенные с первой осью, могут поддерживать ориентацию независимо от винтов, соединенных со второй осью.
[0042] В дополнительном аспекте UAV 104 включает в себя защитные элементы 122 винта. Такие защитные элементы 122 винта могут служить множеству целей, например, защите винтов 109 от повреждения, защите конструкции UAV 104 от повреждения и защите близких объектов от повреждения винтами 109. Дополнительно, защитные элементы 122 винта могут служить в качестве гасителей шума, чтобы ослаблять звук, создаваемый высокоскоростным вращением винтов 109. Следует понимать, что вариант осуществления, который не включает в себя защитные элементы 122 винта, также является возможным. Кроме того, защитные элементы 122 винта различных форм, размеров и функции являются возможными, без отступления от рамок изобретения.
[0043] В дополнительном аспекте UAV 104 включает в себя одну или более систем связи. Системы связи могут включать в себя один или более беспроводных интерфейсов и/или один или более проводных интерфейсов, которые предоставляют возможность UAV 104 связываться через одну или более сетей. Такие беспроводные интерфейсы могут обеспечивать связь по одному или более протоколам беспроводной связи, таким как Bluetooth, WiFi (например, протокол IEEE 802.11), проект долгосрочного развития (LTE), WiMAX (например, стандарт IEEE 802.16), протокол радиочастотной идентификации (RFID), стандарт связи малого радиуса действия (NFC) и/или другие протоколы беспроводной связи. Такие проводные интерфейсы могут включать в себя Ethernet-интерфейс, интерфейс универсальной последовательной шины (USB) или аналогичный интерфейс для связи по проводу, витой паре проводов, коаксиальному кабелю, оптической линии связи, волоконно-оптической линии связи или другому физическому соединению с проводной сетью.
[0044] В примерном варианте осуществления UAV 104 может включать в себя системы связи, которые предоставляют возможность для связи малого радиуса действия и связи большого радиуса действия. Например, UAV 104 может быть выполнен для связи малого радиуса действия с помощью Bluetooth и для связи большого радиуса действия по протоколу CDMA. В таком варианте осуществления UAV 104 может быть выполнен, чтобы функционировать как «горячая точка»; или другими словами, как шлюз или посредник между дистанционным поддерживающим устройством и одной или более сетями передачи данных, такими как сотовая сеть и/или Интернет. Выполненный таким образом UAV 104 может обеспечивать обмен данными, которое дистанционное поддерживающее устройство будет в ином случае не способно выполнять самостоятельно.
[0045] Например, UAV 104 может предоставлять WiFi-соединение с дистанционным устройством и служить в качестве посредника или шлюза с сетью передачи данных поставщика услуг сотовой связи, с которым UAV 104 может соединяться по протоколу LTE или 5G, например. UAV 104 может также служить в качестве посредника или шлюза с сетью высотных аэростатов, спутниковой сетью или сочетанием этих сетей, среди прочего, к которым дистанционное устройство может не иметь возможности доступа в ином случае.
[0046] Аспект направлен на поддерживающий трос 107, который соединяется с UAV 104. Поддерживающий трос 107 может быть соединен с UAV 104 на первом конце поддерживающего троса 107. Поддерживающий трос 107 может быть выполнен из различных материалов. Например, если поддерживающий трос 107 должен быть гибким, поддерживающий трос 107 может включать в себя полимерные волокна с высокой прочностью на разрыв, металлические и/или синтетические тросы, веревку и другие материалы, которые показывают достаточную прочность и гибкость. В другом аспекте поддерживающий трос 107 может быть жестким, так что расстояние между первым концом поддерживающего троса 107 и вторым концом поддерживающего троса 107 является практически фиксированным. В еще одном аспекте поддерживающий трос 107 может подразумевать множество жестких элементов, как, например, в конфигурации в виде цепочки, или в конфигурации в виде телескопического стержня.
[0047] Поддерживающий трос 107 может быть присоединен к точке на UAV 104, которая предназначена, чтобы распределять некоторую часть или весь вес UAV 104 на поддерживающий трос 107. Например, поддерживающий трос 107 может быть соединен непосредственно с элементом UAV 104, таким как ось 117, или узел 105 создающего тягу устройства. Поддерживающий трос 107 может включать в себя карабин на первом конце поддерживающего троса 107, который может сопрягаться с u-образным болтовым соединением, которое прикрепляется к элементу UAV 104, хотя аналогичное средство крепления может быть предположено без отступления от идеи изобретения. Альтернативно, поддерживающий трос 107 может быть соединен со специально предназначенным механизмом прикрепления поддерживающего троса, который соединяется с точкой на UAV 104, или который соединяется с другим элементом или элементами, которые соединяются с UAV 104. Поддерживающий трос 107 может быть присоединен к UAV 104 таким образом, чтобы предоставлять возможность свободных степеней вращения для свободы относительно узла 105 создающего тягу устройства, в то же время сохраняя способность компенсировать часть или всю силу тяжести и инерциальные нагрузки подвешенной системы летательного аппарата. Например, как иллюстрировано, поддерживающий трос 107 может быть присоединен к вращающемуся подшипнику 138, который находится на оси 117.
[0048] Поддерживающий трос 107 может включать в себя канал, который соединяет UAV 104 с источником мощности или данных. Например, в варианте осуществления, где, по меньшей мере, фрагмент системы распределения мощности не находится «на борту» UAV 104, канал может передавать мощность от источника мощности, расположенного внешне по отношению к UAV 104, например, на втором конце поддерживающего троса 107, к UAV 104. В этом случае, канал может включать в себя электрические кабели, которые соединяют аккумулятор на втором конце поддерживающего троса 107 с бортовой системой распределения мощности на UAV 104. Предполагается, что хранилище энергии может быть расположено в бортовой системе распределения мощности, в таком случае силовой кабель в канале может быть использован для заряда бортового устройства хранения энергии, такого как аккумулятор. В другом примере канал может нести провод для передачи данных, сформированных из токопроводящего материала (например, для передачи информационных закодированных электрических сигналов) и/или волоконно-оптическую линию (например, для передачи информационных закодированных оптических сигналов). Центральный контроллер и/или оператор, который может находиться на втором конце поддерживающего троса 107, может управлять операциями UAV 104 дистанционно, отправляя инструкции через сигнальные кабели в UAV 104, который может иметь бортовой процессор. Аналогично, UAV 104 может использовать сигнальные кабели для отправки данных датчиков обратно центральному контроллеру и/или оператору.
[0049] Фиг. 2 иллюстрирует аспект настоящего изобретения, в котором второй конец поддерживающего троса 107 может быть, по существу, присоединен к якорной точке 203, которая располагается за пределами UAV 104. Якорная точка 203 может быть прикреплена к внешней поверхности, такой как мачта или крыша здания, так что якорная точка 203 не способна независимо изменять позицию относительно внешней поверхности, к которой якорная точка 203 прикреплена. Второй конец поддерживающего троса 107 может быть прикреплен к якорной точке 203. Например, якорная точка 203 может быть крюком, который прикреплен болтами к внешней поверхности, в то время как второй конец поддерживающего троса 107 может быть прикреплен к крюку.
[0050] Якорная точка 203 может включать в себя механическое устройство, которое предоставляет возможность изменения длины или натяжения поддерживающего троса 107 между первым концом поддерживающего троса 107 и вторым концом поддерживающего троса 107. Примером такого механического устройства является система лебедки, при этом система лебедки может включать в себя лебедку 207, чтобы втягивать (наматывать) или выпускать (разматывать) поддерживающий трос 107 на катушке, когда катушка приводится в действие мотором, примерами которой являются спусковая лебедка, лебедка для вейкскейтинга, лебедка планера и пневматическая лебедка. Хотя конкретные варианты осуществления были предоставлены, термин «система лебедки» может ссылаться на любую из различных систем и средств для изменения длины поддерживающего троса 107, которая может быть представлена себе без отступления от идеи изобретения.
[0051] В варианте осуществления, где якорная точка 203 включает в себя систему лебедки, лебедка 207 может быть гибкой. Например, система лебедки может быть присоединена к поверхности рядом или на якорной точке 203, либо постоянно, либо временно, например, посредством болтового соединения системы лебедки с внешней поверхностью или посредством соединения системы лебедки со спаривающим механизмом, расположенным на внешней поверхности. Если подвесная система летательного аппарата должна использоваться рядом со зданием, лебедка 207 может быть присоединена на или рядом с крышей здания. Лебедка 207 может также быть присоединена к подвижной опоре, такой как телескопическая мачта, предоставляющая возможность перемещения местоположения якорной точки 203.
[0052] Фиг. 3A иллюстрирует вариант осуществления, который включает в себя подвесную систему летательного аппарата с множеством поддерживающих тросов 107. UAV 104 может иметь точки крепления для двух или более поддерживающих тросов 107. Когда два или более поддерживающих троса прикрепляются к UAV 104, поддерживающие тросы могут управляться независимо или в координации. Например, первый поддерживающий трос может быть прикреплен к первому концу UAV 104, а второй поддерживающий трос может быть прикреплен ко второму концу UAV 104. Первый конец UAV 104 может быть уравновешен вторым концом UAV 104. Когда желательно наклонять UAV 104, так что высота подъема первого конца отличается от высоты подъема второго конца, для того, чтобы, например, ориентировать UAV 104 параллельно направлению силы тяжести, длина первого поддерживающего троса может быть изменена в координации с длиной второго поддерживающего троса для того, чтобы добиваться желаемого действия, чтобы регулировать высоту подъему первого конца UAV 104, либо опуская, либо поднимая первый конец UAV 104, в то время как второй поддерживающий трос может быть практически неподвижным, чтобы поддерживать высоту подъема второго конца UAV 104 относительно первого конца UAV 104. Три поддерживающих троса, прикрепленных к UAV 104, могут осуществлять больший контроль над ориентацией UAV 104. Является возможным, что множество поддерживающих тросов, при этом каждый поддерживающий трос соединяется с одним или более UAV, могут быть соединены с единственной якорной точкой, как, например, на фиг. 3B. Является возможным, что все поддерживающие тросы могут управляться посредством единственной системы лебедки.
[0053] Фиг. 3C иллюстрирует пример, где лебедка 306 может быть расположена на первом конце поддерживающего троса 107, так что лебедка 306 находится «на борту» UAV 104. Дополнительно, в варианте осуществления, где используется множество систем лебедок, предполагается, что может быть первая лебедка 306, которая располагается на или рядом с первым концом поддерживающего троса 107, и вторая лебедка 307, которая располагается на или рядом со вторым концом поддерживающего троса 107. В примере первая лебедка 306 может проводить «более тонкие», или более чувствительные, корректировки длины относительно второй лебедки 307, которая может проводить более грубые регулировки длины поддерживающего троса 107. Возможно представить себе дополнительные конфигурации систем лебедок и поддерживающие тросы без отклонения от идеи изобретения.
[0054] В аспекте якорная точка 203 может быть временной, изменяемой или устанавливаться во время работы подвесной системы летательного аппарата, например, посредством крюка. Фиг. 4A показывает якорную точку 203, которая располагается на неподвижной области. На фиг. 4B якорная точка 203 располагается на транспортере 404, который приспособлен для движения по единственной оси относительно неподвижной области. Например, транспортер 404 может быть трековой транспортной системой, которая может перемещать якорную точку 203 в предварительно определенные местоположения. На фиг. 4C якорная точка 203 располагается на транспортере 404, который приспособлен для поступательного перемещения между множеством осей относительно неподвижной области. Например, транспортер 404 может быть транспортным средством, приспособленным для пересечения двухмерной или трехмерной площадей и перемещения подвесной системы летательного аппарата в любое местоположение в диапазоне транспортного средства. В другом примере транспортер 404 может быть движущейся ступенью, такой как система гантри. Множество транспортеров 404 могут быть использованы поблизости от неподвижной области, как демонстрировано на фиг. 5, так что каждый из транспортеров 404 может осуществлять доступ к фрагментам одного и того же рабочего объема, и каждая из подвесных систем летательного аппарата может иметь любую из конфигураций, описанных на фиг. 4A-C.
[0055] Фиг. 6 демонстрирует другой аспект настоящего изобретения, при этом якорная точка 203 может быть неподвижно присоединена к системе, которая приспособлена для поступательного перемещения местоположения якорной точки 203. Показанная система является краном 602, который может менять местоположение якорной точки 203 посредством объединения вращающегося основания 603 с телескопической стрелой 607. Вращающееся основание 603 может быть приспособлено вращать телескопическую стрелу 607 в любую ориентацию вплоть до 360 градусов, хотя вращение вращающегося основания 603 может быть ограничено в этом диапазоне, предоставляя вращающемуся основанию 603 уменьшенную свободу вращения. Телескопическая стрела 607 может иметь регулируемую длину, так что якорная точка 203 может быть поступательно перемещена ближе к вращающемуся основанию 603, когда длина уменьшается, и дальше от вращающегося основания 603, когда длина телескопической стрелы 607 увеличивается.
[0056] В варианте осуществления, в котором поддерживающий трос 107 соединяется с системой лебедки, движение UAV 104 может регулироваться по шести степеням свободы посредством изменения длины поддерживающего троса 107 и изменения характеристик тяги создающих тягу устройств. Возможное позиционирование UAV 104 может управляться по «огибающей», как видно на фиг. 7, при этом огибающая определяется как объем сферы, которую очерчивает система лебедки, так что конец поддерживающего роса 107, наиболее отдаленный от UAV 104, который может быть соединен с лебедкой или якорной точкой 203, является эпицентром сферы, и радиус сферы является длиной поддерживающего троса 107. Внешняя граница сферы является наиболее отдаленной, до которой поддерживающий трос 107 может протягиваться во всех направлениях. В общем, изменение длины поддерживающего троса 107 может влиять на вертикальную позицию UAV 104 в пределах огибающей. Например, если система лебедки находится в позиции A, система лебедки может втягивать больше поддерживающего троса 107 на катушку, которая может действовать, чтобы перемещать UAV 104 на высоту, относительно якорной точки 203, позиции B. Если система лебедки выпускает больше поддерживающего троса с катушки, когда UAV 104 находится в позиции B, UAV 104 может перемещаться по направлению к позиции A. Таким образом, расстояние между системой лебедки и UAV 104 может быть увеличено или уменьшено посредством увеличения или уменьшения величины поддерживающего троса, который активно используется для поддержания веса UAV 104, предоставляя возможность манипулирования позицией UAV 104 по вертикальной оси. Длина поддерживающего троса 107, который активно используется для поддержки веса UAV 104, может быть отрегулирована другим средством, например, с помощью линейных актуаторов, чтобы изменять длину поддерживающего троса 107.
[0057] Аналогично, регулировки характеристик тяги создающих тягу устройств могут перемещать UAV 104 в пределах огибающей. Например, чтобы перемещать UAV 104 из позиции A в направлении позиции C, создающие тягу устройства могут быть ориентированы, чтобы создавать тягу, вправо, продвигая UAV 104 влево.
[0058] Фиг. 7 также демонстрирует то, как подвесная система летательного аппарата может добиваться позиционирования UAV 104 в пределах огибающей посредством изменений в длине поддерживающего троса 107, которые координируются с изменениями в характеристиках тяги, создаваемой создающими тягу устройствами на борту UAV 104, при этом доступность позиции для UAV 104 в пределах огибающей включает в себя практически все точки в трехмерном пространстве в пределах огибающей. В аспекте может быть желательным, чтобы UAV 104 двигался из первой позиции во вторую позицию в пределах огибающей. Система подвесного летательного аппарата может направлять систему лебедки, чтобы наматывать или разматывать отрезок поддерживающего троса 107, в то время как подвесная система летательного аппарата может одновременно и/или в одно время направлять создающие тягу устройства, чтобы создавать тягу в направлении и с величиной относительно UAV 104 таким образом, чтобы перемещать UAV 104 в желаемое местоположение скоординированным образом. Когда UAV 104 перемещается из позиции A в позицию B, длина поддерживающего троса 107 уменьшается, чтобы тянуть UAV 104 вверх, в то время как создающие тягу устройства ориентируют UAV 104 для того, чтобы создающие тягу устройства могли создавать тягу, толкающую UAV 104 вправо, предоставляя возможность UAV 104 двигаться вверх и вправо практически диагональным образом. Если UAV 104 должен переместиться из позиции A в позицию C, длина поддерживающего троса 107 должна будет увеличиваться, в то время как создающие тягу устройства ориентируют UAV 104 для того, чтобы создающие тягу устройства могли создавать тягу, толкающую UAV 104 влево, предоставляя возможность UAV 104 двигаться практически горизонтально.
[0059] Эта координация между величиной и направлением подъема создающих тягу устройств и длиной и углом поддерживающего троса 107 в сочетании с переменной доступностью тяги по невертикальным осям вследствие грузоподъемности поддерживающего троса 107 предоставляет возможность точного позиционирования. Например, посредством скоординированной манипуляции длиной поддерживающего троса 107 и ориентацией создающего тягу устройства, UAV 104 может поступательно перемещаться в горизонтальной плоскости без изменения вертикального местоположения. Это предоставляет возможность подвесной системе летательного аппарата размещать UAV 104 в точно определенной позиции относительно местоположения системы лебедки в некоторые или все моменты во время полета, например, чтобы осуществлять навигацию в стесненное входное окно. Создающие тягу устройства UAV 104 могут регулировать ориентацию UAV 104 в угол относительно надира, в то время как длина поддерживающего троса 107 может быть отрегулирована, когда UAV 104 приближается к входному окну, чтобы поддерживать оптимальный или желаемый угол поддерживающего троса 107 относительно надира.
[0060] Фиг. 8 показывает аспект настоящего изобретения, в котором якорная точка 203 располагается на транспортном средстве. Транспортное средство может быть любым из множества наземных, морских, летательных и мультимодальных транспортных средств. В показанном примере транспортное средство может быть летательным аппаратом 808, называемым в данном документе «кораблем-носителем», при этом корабль-носитель 808 является достаточно большим, чтобы поддерживать некоторую часть или весь вес UAV 104, когда корабль-носитель 808 находится в движении. Корабль-носитель 808 может быть чисто летательным аппаратом с неподвижным крылом, винтокрылым летательным аппаратом и любым другим летательным аппаратом, приспособленным для осуществления полета. На иллюстрации показанный корабль-носитель 808 является комбинированным/переходным летательным аппаратом как с подъемными поверхностями 811 и воздушным винтом 813, типичным для летательного аппарата с неподвижным крылом, так и создающими тягу устройствами 816, характерными для винтокрылого летательного аппарата. Показанная конфигурация корабля-носителя 808 имеет преимущество предоставления возможности крейсерского полета в большом диапазоне для летательного аппарата с неподвижным крылом с возможностями зависания и точного определения местоположения винтокрылого летательного аппарата. Корабль-носитель 808 может также иметь предоставляемые винтокрылым летательным аппаратом способности вертикального взлета и приземления (VTOL).
[0061] На иллюстрации якорная точка 203 располагается на нижней стороне корабля-носителя 808, хотя другие местоположения для якорной точки 203 являются возможными. UAV 104 может надежно прикрепляться к кораблю-носителю 808, когда UAV 104 «припаркован» или не находится в полете. Корабль-носитель 808 может иметь док (не показан), в котором UAV 104 располагается, когда UAV 104 не находится в полете. Док может быть внутренним (так что UAV 104 хранится практически внутри корабля-носителя 808), внешним (так что UAV 104 прикрепляется к внешней поверхности корабля-носителя 808) или сочетанием того и другого. Док может включать в себя зажимы, которые надежно удерживают UAV 104 на месте. Док может отпускать UAV 104, когда UAV 104 подготавливается для полета, предоставляя возможность UAV 104 выходить из корабля-носителя 808. Длина поддерживающего троса 107 может быть увеличена посредством системы лебедки, опускающей UAV 104 из корабля-носителя. Когда UAV 104 вышел из корабля-носителя 808, создающие тягу устройства UAV 104 могут активизироваться, направляя полет UAV 104 самостоятельно или в координации с системой лебедки. Когда UAV 104 заканчивает полет и готов припарковаться, UAV 104 может возвращаться к кораблю-носителю 808 и прикрепляться к доку.
[0062] Фиг. 9 демонстрирует то, как подвесная система летательного аппарата может осуществлять точное позиционирование UAV 104 относительно корабля-носителя 808 в пределах огибающей посредством изменений в длине поддерживающего троса 107, которые координируются с изменениями в характеристиках тяги, создаваемой создающими тягу устройствами на борту UAV 104, способом, аналогичным способу, продемонстрированному на фиг. 7. Посредством координации системы лебедки и создающих тягу устройств UAV 104 может быть перемещен из позиции A в позицию B относительно корабля-носителя по любой из различных возможных траекторий.
[0063] Точное позиционирование UAV 104, описываемое в данном документе, которое позволяется посредством подвесной системы летательного аппарата, может предоставлять возможность UAV 104 сохранять неподвижную позицию, в то время как корабль-носитель 808 изменяет местоположение во время схемы полета корабля-носителя 808. Например, фиг. 10 показывает корабль-носитель 808, который может иметь схему полета, состоящую из круговой схемы полета в зоне ожидания, в то время как UAV 104 сохраняет практически неподвижную позицию относительно фиксированной контрольной точки, такой как контрольная поверхность на земле. Скоординированные изменения тягового двигателя и системы лебедки могут перепозиционировать UAV 104 относительно корабля-носителя 808. Например, если корабль-носитель 808 был взят в качестве неподвижной контрольной точки для UAV 104, так что перемещение корабля-носителя 808 относительно земли игнорируется, будет казаться, что UAV 104 кружит под кораблем-носителем 808 способом, аналогичным схеме полета в зоне ожидания, которую корабль-носитель 808 показывает на иллюстрации, демонстрируя, что UAV 104 может непрерывно регулировать вектор тяги тягового двигателя, в то время как система лебедки может непрерывно регулировать длину поддерживающего троса 107 для того, чтобы поддерживать желаемую позицию относительно неподвижной точки. Этот процесс непрерывного регулирования позиции UAV 104 или вектора может происходить, в то время как корабль-носитель 808 находится в движении, так что, например, и UAV 104, и корабль-носитель 808 встречно вращаются. Таким образом UAV 104 приспособлен, чтобы достигать любой позиции в пределах огибающей, в то время как огибающая перемещается вследствие перемещения корабля-носителя 808 без необходимости изменения в схеме полета корабля-носителя 808. Максимальная окружность схемы полета в зоне ожидания, которую корабль-носитель 808 может поддерживать, в то время как UAV 104 поддерживает статичную позицию относительно неподвижной контрольной точки, может управляться посредством максимальной длины поддерживающего троса 107.
[0064] Фиг. 11 демонстрирует аспект настоящего изобретения, где единственный UAV 104 может быть соединен с множеством кораблей-носителей. На иллюстрации UAV 104 поддерживается первым кораблем-носителем 808a и вторым кораблем-носителем 808b посредством первого поддерживающего троса 808a и второго поддерживающего троса 808b, соответственно. Каждый из поддерживающего троса 808a и поддерживающего троса 808b может быть задействован посредством единственной системы лебедки или множества систем лебедок. Длина первого поддерживающего троса 808a и второго поддерживающего троса 808b может регулироваться в координации с системой создающего тягу устройства UAV 104 и в координации со схемой полета первого корабля-носителя 808a и второго корабля-носителя 808b во время работы подвесной системы летательного аппарата. UAV 104 может быть приспособлен для достижения практически любой позиции в пределах огибающей каждого из корабля-носителя 808a и корабля-носителя 808b.
[0065] Фиг. 12 иллюстрирует блок-схему системы управления, которая может координировать управление поддерживающим тросом 107 и тяговым двигателем 1207 для того, чтобы позиционировать UAV 104 в желаемом местоположении и/или ориентации в пределах огибающей. Системный контроллер может включать в себя контроллер 1203, который принимает различные командные входные значения, такие как желаемое местоположение UAV 104. Контроллер 1203 может определять необходимые регулировки, которые должны быть выполнены по отношению к длине поддерживающего троса 107 посредством приведения в действие 1212 лебедки и тягового двигателя 1207 для того, чтобы перемещать UAV 104 из первоначальной позиции в желаемое местоположение. Контроллер 1203 может регулировать отдельные создающие тягу устройства или узлы создающих тягу устройств в тяговом двигателе 1207, чтобы создавать тягу с желаемыми направлением и величиной, например, чтобы достигать какой-либо позиции и ориентации UAV 104, так что первое создающее тягу устройство или второй узел создающего тягу устройства может иметь первое направление и/или первую величину, а второе создающее тягу устройство или второй узел создающего тягу устройства может иметь второе направление и/или вторую величину. Также принимается во внимание, что ориентация тяги, создаваемой тяговым двигателем 1207 относительно UAV 104, может быть статичной. Ориентация UAV 104 может быть изменена посредством изменения тяги, создаваемой отдельными создающими тягу устройствами на UAV 104, также как посредством изменения натяжения через поддерживающий трос 107 через сочетание наматывания поддерживающего троса 107 и изменения тяги. Уменьшение или увеличение натяжения в поддерживающем тросе 107 может служить другим целям также. Например, если UAV 104 движется по сложному маршруту, может не быть линии прямой видимости между UAV 104 и якорной точкой. В этом случае, UAV 104 может требовать большего «ослабления» в поддерживающем тросе 107 и, таким образом, контроллер 1203 может уменьшать натяжение в поддерживающем тросе 107.
[0066] В варианте осуществления, когда подвесная система летательного аппарата включает в себя корабль-носитель 808, тяговый двигатель 1207 может включать в себя создающие тягу устройства на борту корабля-носителя 808, так что системный контроллер 1203 может координировать и управлять создающими тягу устройствами на борту UAV 104 и корабле-носителе 808. Таким образом, системный контроллер 1203 может координировать управление тягой корабля-носителя, тягу UAV 104 и вариации в длине поддерживающего троса 107. Следует понимать, что, когда системный контроллер 1203 координирует вариации в длине поддерживающего троса 107, характерные признаки тяги корабля-носителя 808, и характерные признаки тяги UAV 104, такая координация может включать в себя отсутствие выполнения изменений в длине поддерживающего троса 107, характерных признаках тяги корабля-носителя 808 и характерных признаках тяги UAV 104, когда системный контроллер 1203 определяет, что изменение какого-либо сочетания упомянутых признаков не является желательным, вплоть до и включая в себя сценарии, когда нулевое создание тяги, по меньшей мере, от одного из UAV 104 и корабля-носителя 808 является желательным. Например, системный контроллер 1203 может динамически управлять длиной поддерживающего троса 107 в ответ на изменения в позиции UAV 104 для того, чтобы поддерживать степень натяжения поддерживающего троса 107 и предотвращать рывки UAV 104. Одновременно или параллельно, системный контроллер 1203 может динамически управлять условиями тяги корабля-носителя и/или UAV 104, чтобы достигать желаемой позиции и ориентации UAV 104.
[0067] Системный контроллер 1203 может принимать обратную связь («данные датчика») от датчика 1216, которая может служить любой из нескольких целей, таких как оптимизация суммарной энергии, выводимой подвесной системой летательного аппарата, и выполнение управления с замкнутым контуром во время позиционирования UAV 104. Например, данные датчика могут предоставлять возможность контроллеру 1203 вычислять оптимизированное направление подъема и величину, которые могут быть созданы тяговым двигателем 1207 относительно направления подъема и величины, создаваемых поддерживающим тросом 107, как функцию длины используемого поддерживающего троса 107 и/или относительной ориентации поддерживающего троса 107 и/или UAV 104. Датчик 1216 может измерять характерные признаки UAV 104 и поддерживающего троса 107, такие как натяжение поддерживающего троса 107 и профиль силы и инерциальные показатели UAV 104. Датчик 1216 может измерять характерные признаки полета корабля-носителя 808. Обратная связь датчика от корабля-носителя 808 и UAV 104 может быть использована во время работы подвесной системы летательного аппарата, чтобы координировать полет каждого из корабля-носителя 808 и UAV 104, в то время как соединены посредством поддерживающего троса 107. Предполагается, что эти характерные признаки могут быть измерены или оценены опосредованно. Системный контроллер 1203 может использовать различные входные данные для определения оптимального угла поддерживающего троса 107 и угля тяги и величины. Например, подвесная система летательного аппарата может включать в себя датчик ветра, который вычисляет направление и величину порыва ветра. Системный контроллер 1203 может направлять тяговый двигатель 1207, чтобы создавать противоположную тягу, чтобы практически нейтрализовать действие ветра на позицию UAV 104. Поддерживающий трос 107 может принимать на себя большую часть вертикальной нагрузки UAV 104 для того, чтобы предоставлять возможность тяговому двигателю 1207 создавать боковую тягу для нагрузки от порыва ветра. Датчик 1216 может предоставлять другие данные, релевантные для работы системы, которые могут быть использованы контроллером 1203, чтобы направлять актуатор 1212 лебедки и тяговый двигатель 1207. Например, оптические датчики могут быть использованы в определении того, является ли маршрут полета чистым от препятствий, и если нет, какой альтернативный маршрут полета может быть чистым. Датчик 1216 может быть осуществлен как единственный датчик или множество датчиков и может быть расположен в системе, рядом с системой, или удаленно от системы, в то же время являясь приспособленным для измерения атрибутов, релевантных работе системы.
[0068] Фиг. 13 показывает блок-схему последовательности операций для работы подвесной системы летательного аппарата, когда она перепозиционирует UAV 104 из первоначального местоположения в желаемое местоположение. На этапе 1306 контроллер 1203 может определять маршрут полета, чтобы перемещать UAV 104 из первоначальной позиции в желаемую позицию. Контроллер 1203 может принимать желаемое местоположение в качестве входных данных. Контроллер 1203 может также принимать или определять первоначальную позицию UAV 104. Определение маршрута полета может подразумевать определение оптимальной длины поддерживающего троса 104 и оптимального угла тяги и величины.
[0069] На этапе 1307 контроллер 1203 может инструктировать регулировку поддерживающего троса 107, на этапе 1309, контроллер 1203 может инструктировать регулировку тягового двигателя 1207, так что длина поддерживающего троса 107 и тяговый двигатель 1207 могут регулироваться скоординированным образом. Это может вести к приведению в действие создающего тягу устройства на этапе 1315 и приведению в действие поддерживающего троса на этапе 1312, что может также происходить скоординированным образом.
[0070] На этапе 1319 контроллер 1203 может определять, когда UAV 104 достиг желаемого местоположения, и может инструктировать регулировку поддерживающего троса 107 и тягового двигателя 1207 таким образом, чтобы поддерживать позицию UAV 104, хотя контроллер 1203 может заканчивать цикл. Регулировки поддерживающего троса 107 и тягового двигателя 1207 могут выполняться на основе времени, т.е. контроллер 1203 может определять оптимальную длину поддерживающего троса 107 и угол и величину создающего тягу устройства в нескольких или практически во всех точках по маршруту полета, например, чтобы обеспечивать плавное восприятие полета или осуществлять навигацию по сложному маршруту полета.
[0071] Этап 1331 показывает, как контроллер 1203 может принимать обратную связь, например, от датчика 1216. Контроллер 1203 может определять оптимальную длину поддерживающего троса 107 и угол тяги и величину в «реальном времени», т.е. контроллер 1203 может регулярно или непрерывно использовать обратную связь от системы для оптимизации работы подвесной системы летательного аппарата скоординированным образом. Например, контроллер 1203 может использовать данные от датчика 1216 для определения оптимального полета, когда UAV 104 находится в движении. На этапе 1335 контроллер 1203 может использовать обратную связь от датчика 1216 для того, чтобы непрерывно регулировать длину поддерживающего троса 107 и угол тяги и величину до тех пор, пока контроллер 1203 не определит, что UAV 104 достиг желаемого местоположения.
[0072] Другие типы обратной связи могут быть приняты во время этапа 1331 и использованы контроллером 1203 во время управления работой подвесной системой летательного аппарата. Обратная связь может быть принята от любого числа проводных или беспроводных источников, с которыми контроллер 1203 способен связываться, таких как командный центр, второй дрон и приемопередатчик. Например, контроллер 1203 может принимать данные о погоде, которые могут влиять на маршрут полета для подвесной системы летательного аппарата. Контроллер 1203 может использовать данные о погоде в разработке нового маршрута полета.
[0073] Фиг. 13 дополнительно включает в себя этапы для работы подвесной системы летательного аппарата, которая включает в себя корабль-носитель 808, как показано на необязательных этапах 1301. Контроллер 1203 может принимать желаемое местоположение для UAV 104 в качестве входных данных. Этап 1302 показывает, что контроллер может определять позицию подхода для корабля-носителя 808, при этом позиция подхода является местоположением корабля-носителя 808, которая предоставляет возможность UAV 104 быть приспособленным для достижения желаемой позиции, когда UAV 104 запущен. Контроллер 1203 может определять маршрут полета корабля-носителя 808, чтобы перемещать корабль-носитель 808 из первоначальной позиции корабля-носителя 808 в позицию подхода на этапе 1303. Контроллер 1203 может также принимать или определять первоначальную позицию корабля-носителя 808. Определение маршрута полета корабля-носителя 808 может подразумевать определение оптимизированного маршрута между первоначальной позицией корабля-носителя 808 и позицией подхода. Оптимизированный маршрут может балансировать скорость движения, продолжительность полета, использование летательных аппаратов с большим диапазоном в противовес аппаратам с малым диапазоном, препятствия, энергоэффективность, желаемый угол входа и другие факторы, которые влияют на полет корабля-носителя. Контроллер 1203 может инструктировать кораблю-носителю зависать или описывать круг, когда корабль-носитель 808 практически достиг позиции подхода. Контроллер 1203 может затем инструктировать запуск UAV 104 с корабля-носителя 808, как показано на этапе 1304. UAV 104 может также быть запущен с корабля-носителя 808 в любой момент во время движения корабля-носителя 808. После запуска UAV 104 может использовать способ, кратко изложенный в данном документе, чтобы прибывать в желаемое местоположение.
[0074] Различные аспекты процесса, кратко изложенные на фиг. 13, могут быть проведены одним или более пользователями-людьми. Например, удаленный оператор может определять маршрут для корабля-носителя и координировать полет корабля-носителя, например, посредством дистанционного управления кораблем-носителем. Аналогично, удаленный оператор может иметь возможность управлять запуском UAV 104, полетом UAV 104 и работой системы лебедки.
[0075] Системный контроллер 1203 может быть осуществлен, по меньшей мере, частично, как один или более встроенных или имеющих общее назначение процессоров, компьютеров, устройств обработки или вычислительных устройств, имеющих память. Системный контроллер 1203 может также быть осуществлен, частично, как различные функциональные и/или логические (например, компьютерно-читаемая инструкция, код, устройство, схема, схема обработки и т.д.) элементы, исполняемые или задействуемые для выполнения аспектов вариантов осуществления, описанных в данном документе. Системный контроллер 1203 может быть установлен и закреплен в или присоединен к любому элементу подвесной системы летательного аппарата. Дополнительно, системный контроллер 1203 может быть расположен удаленно от системы и может в ином случае быть на прямой или непрямой связи с системой.
[0076] Системный контроллер 1203 может включать в себя процессор, память, устройство хранения и устройства ввода/вывода (I/O). Некоторые или все компоненты могут быть взаимосвязаны через системную шину. Процессор может быть одно- или многопоточным и может иметь одно или более ядер. Процессор может исполнять инструкции, такие как инструкции, сохраненные в памяти и/или в устройстве хранения. Информация может быть принята и выведена с помощью одного или более I/O-устройств.
[0077] Память может хранить информацию и может быть компьютерно-читаемым носителем, таким как энергозависимая или энергонезависимая память. Устройство(а) хранения могут предоставлять хранилище для компьютерной системы и могут быть компьютерно-читаемым носителем. В различных вариантах осуществления устройство(а) хранения могут быть одним или более из устройства флеш-памяти, устройства жесткого диска, оптического дискового устройства, ленточного устройства или любым другим типом устройства хранения.
[0078] I/O-устройства могут предоставлять операции ввода/вывода для компьютерной системы. I/O-устройства могут включать в себя клавиатуру, указывающее устройство и/или микрофон. I/O-устройства могут дополнительно включать в себя блок отображения для отображения графических пользовательских интерфейсов, динамик и/или принтер. Внешние данные могут быть сохранены в одной или более доступных внешних базах данных.
[0079] Признаки настоящих вариантов осуществления, описанных в данном документе, могут быть реализованы в цифровой электронной схеме и/или в компьютерных аппаратных средствах, программно-аппаратных средствах, программном обеспечении и/или в их сочетаниях. Признаки настоящих вариантов осуществления могут быть реализованы в компьютерном программном продукте, материально осуществленном в виде носителя информации, такого как машиночитаемое устройство хранения, и/или в виде распространяемого сигнала, для исполнения программируемым процессором. Варианты осуществления этапов настоящего способа могут быть выполнены посредством программируемого процессора, исполняющего программу инструкций, чтобы выполнять функции описанных реализаций, оперируя входными данными и формируя выходные данные.
[0080] Признаки настоящих вариантов осуществления, описанных в данном документе, могут быть реализованы в виде одной или более компьютерных программ, которые являются исполняемыми на программируемой системе, включающей в себя, по меньшей мере, один программируемый процессор, соединенный для приема данных и/или инструкций от, и для передачи данных и/или инструкций в, систему хранения данных, по меньшей мере, одно устройство ввода и, по меньшей мере, одно устройство вывода. Компьютерная программа может включать в себя набор инструкций, которые могут быть использованы, непосредственно или опосредованно, в компьютере, чтобы выполнять некоторую деятельность или приводить к некоторому результату. Компьютерная программа может быть написана в любой форме языка программирования, включающей в себя компилируемые или интерпретируемые языки, и она может быть развернута в любой форме, включающей в себя автономную программу или модуль, компонент, подпрограмму или другой блок, подходящий для использования в вычислительном окружении.
[0081] Подходящие процессоры для выполнения программы инструкций могут включать в себя, например, процессоры общего и специального назначения и/или единственный процессор или один из множества процессоров любого вида компьютера. В общем, процессор может принимать инструкции и/или данные из постоянного запоминающего устройства (ROM) или оперативного запоминающего устройства (RAM) или из того и другого. Такой компьютер может включать в себя процессор для исполнения инструкций и одно или более запоминающих устройств для хранения инструкций и/или данных.
[0082] В общем, компьютер может также включать в себя, или быть функционально соединен для связи, с одним или более устройствами хранения для хранения файлов данных. Такие устройства включают в себя магнитные диски, такие как внутренние жесткие диски и/или съемные диски, магнитно-оптические диски и/или оптические диски. Устройства хранения, подходящие для материального осуществления компьютерных программных инструкций и/или данных, могут включать в себя все формы энергонезависимой памяти, включающей в себя, например, полупроводниковые запоминающие устройства, такие как EPROM, EEPROM и устройства флеш-памяти, магнитные диски, такие как внутренние жесткие диски и съемные диски, магнитно-оптические диски и диски CD-ROM и DVD-ROM. Процессор и память могут быть дополнены, или объединены, в одну или более ASIC (специализированных интегральных схем).
[0083] Чтобы обеспечивать взаимодействие с пользователем, признаки настоящих вариантов осуществления могут быть реализованы на компьютере, имеющем устройство отображения, такое как LCD (жидкокристаллический дисплей) монитор, для отображения информации пользователю. Компьютер может дополнительно включать в себя клавиатуру, указательное устройство, такое как мышь или трекбол, и/или сенсорный экран, посредством которых пользователь может предоставлять входные данные компьютеру.
[0084] Признаки настоящих вариантов осуществления могут быть реализованы в компьютерной системе, которая включает в себя внутренний компонент, такой как сервер данных, и/или которая включает в себя компонент промежуточного программного обеспечения, такой как сервер приложений или Интернет-сервер, и/или которая включает в себя внешний интерфейсный компонент, такой как клиентский компьютер, имеющий графический пользовательский интерфейс (GUI) и/или Интернет-браузер, или любое их сочетание. Компоненты системы могут быть соединены посредством любой формы или носителя для обмена цифровыми данными, например, сети связи. Примеры сетей связи могут включать в себя, например, LAN (локальную вычислительную сеть), WAN (глобальную вычислительную сеть) и/или компьютеры и сети, формирующие Интернет.
[0085] Компьютерная система может включать в себя клиентов и серверы. Клиент и сервер могут быть удаленными друг от руга и взаимодействовать через сеть, как, например, описанные в данном документе. Взаимосвязь клиента и сервера может возникать посредством компьютерных программ, работающих на соответствующих компьютерах и имеющих клиент-серверную взаимосвязь друг с другом.
[0086] Фиг. 14 демонстрирует аспект настоящего изобретения, в котором UAV 104 может включать в себя механизм 1426 прикрепления полезного груза, так что UAV 104 является приспособленным для соединения с полезным грузом. В показанном варианте осуществления механизм 1426 прикрепления полезного груза включает в себя платформу 1428, которая может прикрепляться к полезному грузу. Механизм 1426 прикрепления полезного груза может включать в себя кронштейн 1433, такой как поворотный подшипник или изгиб, который может прикрепляться к платформе 1428, так что ось 117 может быть закреплена в кронштейне 1433 и, по существу, соединяться с платформой 1428. Кронштейн 1433 может предоставлять возможность оси 117 вращаться относительно платформы 1428 по одной оси или множеству осей.
[0087] Платформа 1428 может включать в себя средство для захвата полезного груза и затем отпускания полезного груза в предназначенном местоположении, по сигналу, или по другим указателям отпускания. Например, пользователь может зажимать полезный груз на платформе 1428 с помощью зажимов (не показаны), которые содержатся в или соединяются с платформой 1428. Зажимы могут отпускать полезный груз, когда UAV 104 прибыл в точку доставки. Другие формы захвата полезного груза являются возможными. Например, платформа 1428 может включать в себя средство для бесконтактного прикрепления, такое как магнитная система прикрепления.
[0088] Платформа 1428 может использовать систему сопряжения, в которой зажимы на платформе 1428 могут взаимоблокироваться с интерфейсом на полезном грузе. Система сопряжения может управляться дистанционно, т.е. пилот может определять, когда UAV 104 прибыл в точку доставки, и инструктировать UAV 104 убирать зажимы, так что полезный груз может быть отделен от UAV 104 и размещен в точке доставки. Система сопряжения может также работать автономно, или без вмешательства человека. Например, UAV 104 может определять, что UAV 104 находится в точке доставки, например, из GPS-позиционирования или машинного зрения, и отпускать зажимы на полезном грузе, оставляя полезный груз в точке доставки. Аналогично, UAV 104 может использоваться для возврата полезного груза посредством отправки UAV 104 в указанное местоположение, в котором платформа 1428 может быть способна закреплять упомянутый полезный груз. В аспекте платформа 1428 может включать в себя кожух, так что полезный груз может быть закреплен в кожухе перед полетом.
[0089] Платформа 1428 может быть соединена с осью 117 UAV 104, которая может предоставлять возможность платформе 1428 вращаться независимо от UAV 104. В аспекте изобретения механизм 1426 прикрепления полезного груза может дополнительно включать в себя средство для достижения дополнительных вращательной, позиционной и/или поступательной степеней свободы для полезного груза. Например, механизм 1426 прикрепления полезного груза может включать в себя механизм 1436 карданного подвеса, который соединяет платформу 1428 с полезным грузом. Механизм 1436 карданного подвеса может также быть ползунковым механизмом. Дополнительные степени свободы для полезного груза относительно платформы 1428 могут быть достигнуты пассивно или активно. Механизм 1426 прикрепления полезного груза может включать в себя средство для соединения платформы 1428 и UAV 104, так что платформа 1428 и UAV 104 могут не быть в непосредственном контакте. Например, второй поддерживающий трос может соединять платформу 1428 и UAV 104, так что, например, платформа 1428 приспособлена для подвешивания независимо от ориентации UAV 104. В этой иллюстрации отклонение в карданном подвесе между UAV 104 и полезным грузом предоставляет возможность независимого выравнивания полезного груза от вектора чистой тяги узла, предоставляя возможность точного позиционирования полезного груза, так что полезный груз может сохранять нейтральную ориентацию, в то время как UAV 104 может быть наклонен.
[0090] В аспекте настоящего изобретения подвесная система летательного аппарата может быть оборудована для конкретного функционального использования. UAV 104 может прикрепляться к функциональному модулю, спроектированному, чтобы предоставлять возможность подвесной системе летательного аппарата задействоваться в конкретной задаче или диапазоне задач. Например, может быть желательным использовать подвесную систему летательного аппарата для выполнения очистки в труднодоступном местоположении, таком как, например, окна высотного здания, лопасти ветровой турбины и солнечные панели. В этом случае, иллюстрированном на фиг. 15, модуль может включать в себя программное обеспечение, программно-аппаратные средства и/или аппаратные средства, которые могут предоставлять возможность доступа для подвесной системы летательного аппарата и выполнения очистки. Например, модуль очистки может включать в себя аппаратные средства очистки, такие как резервуар для мыла, резервуар для воды и резиновую щетку или другой чистящий инструмент, такой как механизм мытья под давлением. Модуль очистки может также включать в себя механизмы, которые предоставляют возможность UAV 104 поддерживать контакт с поверхностью, такие как выборочно активизируемые чашечные присоски. Во время работы UAV 104 может быть приведен на правильную высоту подъема поверхности, которая желательно должна быть очищена, посредством координации поддерживающего троса 107 и создающего тягу устройства. Может быть желательным использовать якорную точку 203, которая находится выше желаемого местоположения очистки, например, рядом с крышей здания. В показанном примере якорная точка 203 фиксируется на выдвинутой мачте, которая располагается на крыше здания. UAV 104 может направлять создающее тягу устройство, чтобы создавать усилие в направлении, предоставляющем возможность для UAV 104 касаться поверхности с помощью модуля очистки окна, в то время как поддерживающий трос несет необходимую величину веса UAV 104. Подвесная система летательного аппарата может активизировать модуль очистки для выполнения задач, необходимых для приведения поверхности в чистое состояние.
[0091] Другим примером функционального модуля может быть модуль обезвреживания подрывного заряда. Модуль обезвреживания подрывного заряда может включать в себя, например, инструменты, используемые роботами для обезвреживания взрывчатых веществ, такие как камера машинного зрения, приводимая в действие механическая рука и средство для нейтрализации бомбы. UAV 104 может опускаться сверху подозрительного устройства, определять, составляет ли устройство угрозу, и если так, нейтрализовать подозрительное устройство.
[0092] В некоторых вариантах осуществления UAV 104 может не включать в себя платформу. Функциональный модуль может соединяться непосредственно с другими элементами UAV 104, так что UAV 104 может быть предназначен для конкретной функции, вместо того, чтобы иметь средство для предоставления взаимозаменяемой функциональности. Например, в конфигурации, где подвесная система летательного аппарата конфигурируется для борьбы с пожарами, UAV 104 может иметь прямое и/или постоянное соединение с пожарным шлангом.
[0093] Фиг. 16 иллюстрирует пример, где система летательного аппарата конфигурируется для очистки и/или технического обслуживания системы фотогальванических батарей (PV). Корабль-носитель 808 может прибывать в окрестности PV-системы и входить в режим полета в зоне ожидания. Альтернативно, когда подвесная система летательного аппарата не содержит корабль-носитель 808, например, когда якорная точка 203 прикрепляется в неподвижной области, подвесная система летательного аппарата может иметь неподвижную якорную точку 203, которая располагается над PV-системой. UAV 104 может быть запущен к первой PV-панели. UAV 104 может включать в себя функциональный модуль для очистки PV-систем, такой как функциональный модуль, который является аналогичным описанному модулю очистки окон. Когда UAV 104 закончил в достаточной степени очистку первой PV-панели, UAV 104 может перемещаться ко второй PV-панели и начинать очистку второй PV-панели. Этот процесс может продолжаться до тех пор, пока система PV-батарей не будет в достаточной степени очищена. Единственный корабль-носитель или якорная точка 203 может быть прикреплена к множеству UAV, так что каждый UAV из множества UAV может быть задействован в очистке системы PV-батарей. Это имеет результат уменьшения суммарного времени, занятого в очистке, в то же время увеличивая эффективность очистки.
[0094] В аспекте настоящего изобретения подвесная платформа используется для доставки полезного груза, как демонстрируется посредством фиг. 17. Полезный груз может быть прикреплен к UAV 104. Полезный груз может быть закреплен посредством платформы 1428, что может происходить вручную или автономно. Полезный груз может быть прикреплен к UAV 104 в точке запуска. Точка запуска может быть предварительно определена, например, товарный склад или промежуточный пункт логистического маршрута. Полезный груз может быть прикреплен к UAV 104 на земле, в то время как UAV 104 пристыкован к кораблю-носителю 808. Как только корабль-носитель 808 находится в воздухе с полезным грузом, корабль-носитель 808 может совершать крейсерский полет по маршруту, который включает в себя точку сброса, как показано на фиг. 17A.
[0095] Фиг. 17B показывает, что, когда корабль-носитель 808 находится рядом с точкой сброса, корабль-носитель 808 может запускать UAV 104. Это может подразумевать переход корабля-носителя 808 из режима полета в режим зависания. UAV 104 может лететь в точку сброса, с помощью процесса, кратко изложенного ранее, и расцепляться с полезным грузом, оставляя полезный груз в точке сброса, как показано на фиг. 17C. UAV 104 может быть вызван обратно к кораблю-носителю 808.
[0096] Обратный ход этого процесса может быть использован, в котором система отправляется для возврата полезного груза из точки возврата, как демонстрируется посредством фиг. 17D-F. Аналогично, система может быть использована для возврата полезного груза из точки возврата и доставки в точку сброса.
[0097] Способность UAV 104 осуществлять навигацию в ограниченных пространствах во время доставки полезных грузов демонстрируется на фиг. 18. В этом примере подвесная система летательного аппарата способна доставлять полезный груз на или возвращать полезный груз с балкона, который может быть частично или в значительной степени огорожен, например, свесом крыши. Подвесная система летательного аппарата, посредством способности доставлять и возвращать полезные грузы из ограниченных пространств, может аналогично осуществлять доступ к конкретным местам полезного груза и устройствам хранения полезного груза, таким как ячейки для посылок. Места полезных грузов и устройства хранения полезного груза могут иметь любую или все характеристики, относящиеся к автоматизированным, ручным, стационарным и мобильным системам.
[0098] Следует понимать, что предыдущие примеры функциональности, предоставленные в данном документе, не предназначены быть ограниченными. UAV 104 может быть выполнен для предоставления других типов функциональности без отступления от рамок изобретения.
[0099] В то время как некоторые аспекты были описаны и показаны на сопровождающих чертежах, следует понимать, что они являются просто иллюстративными, а не ограничивающими широкое изобретение, и что изобретение не ограничивается конкретными конструкциями и компоновками, показанными и описанными, поскольку различные другие модификации могут приходить на ум обычным специалистам в области техники.
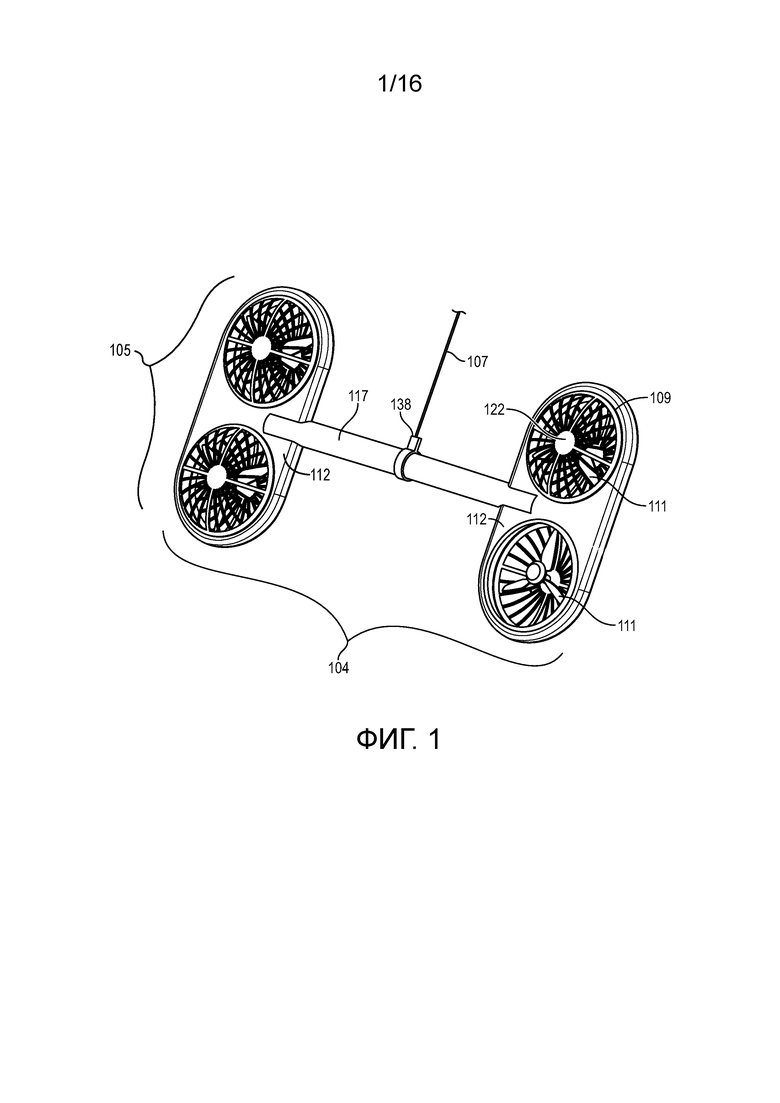

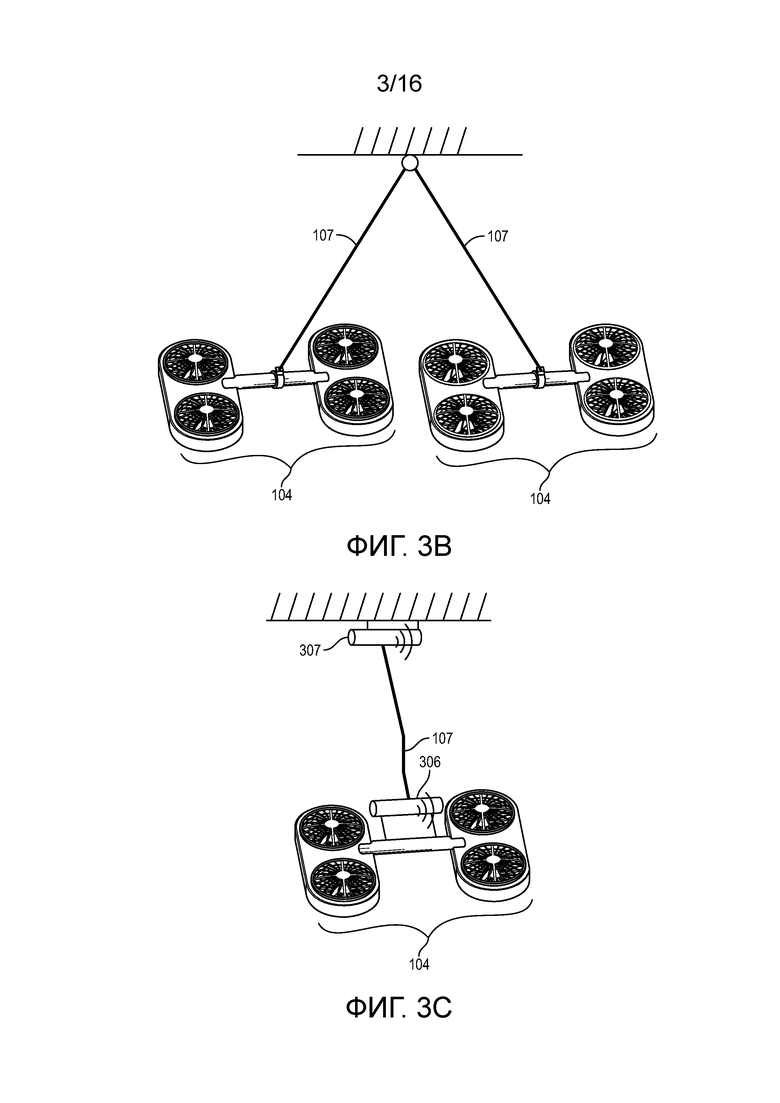
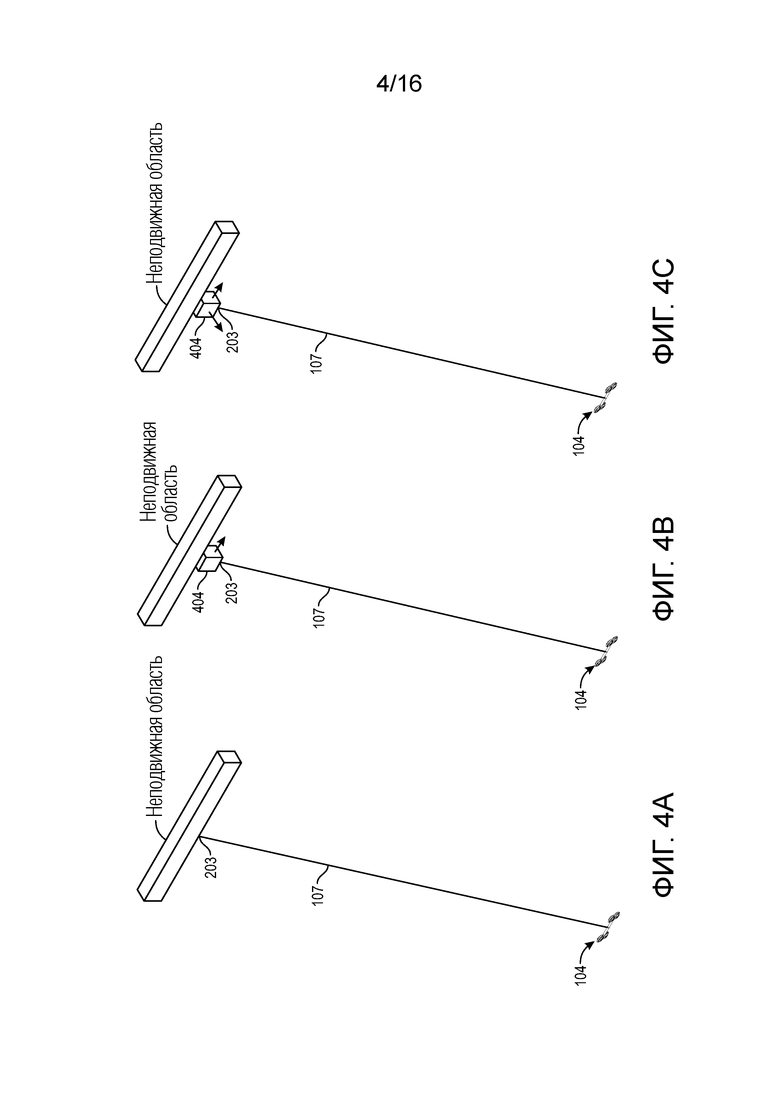

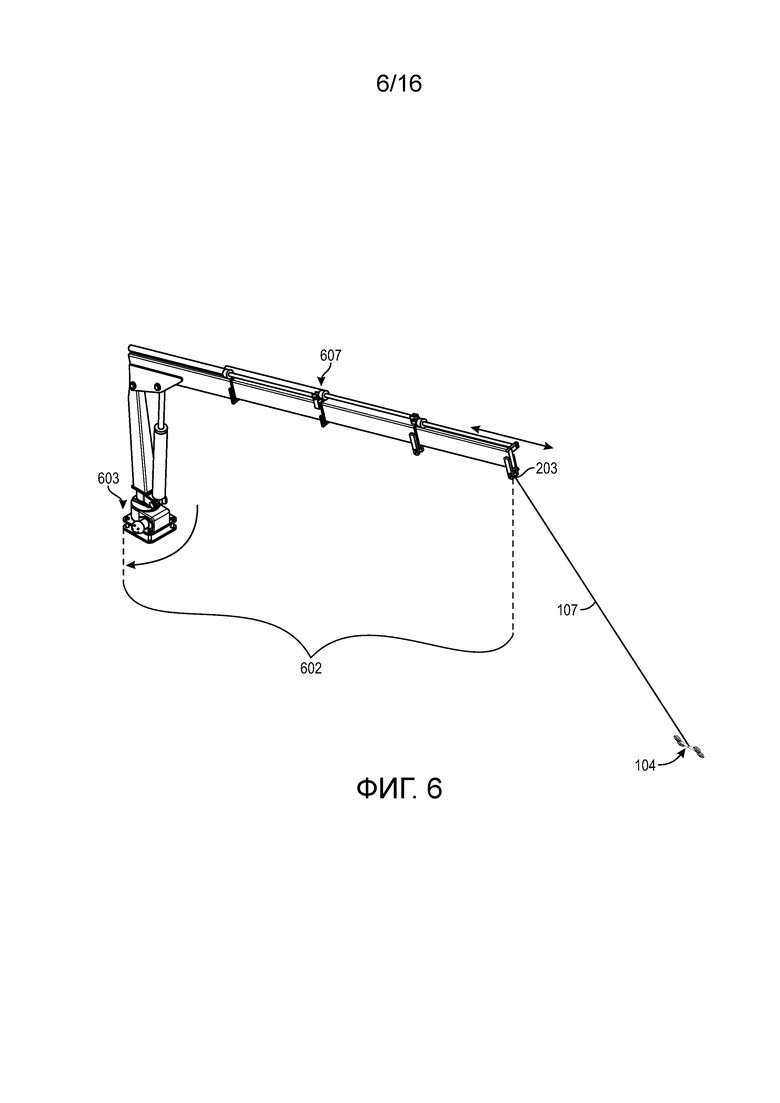
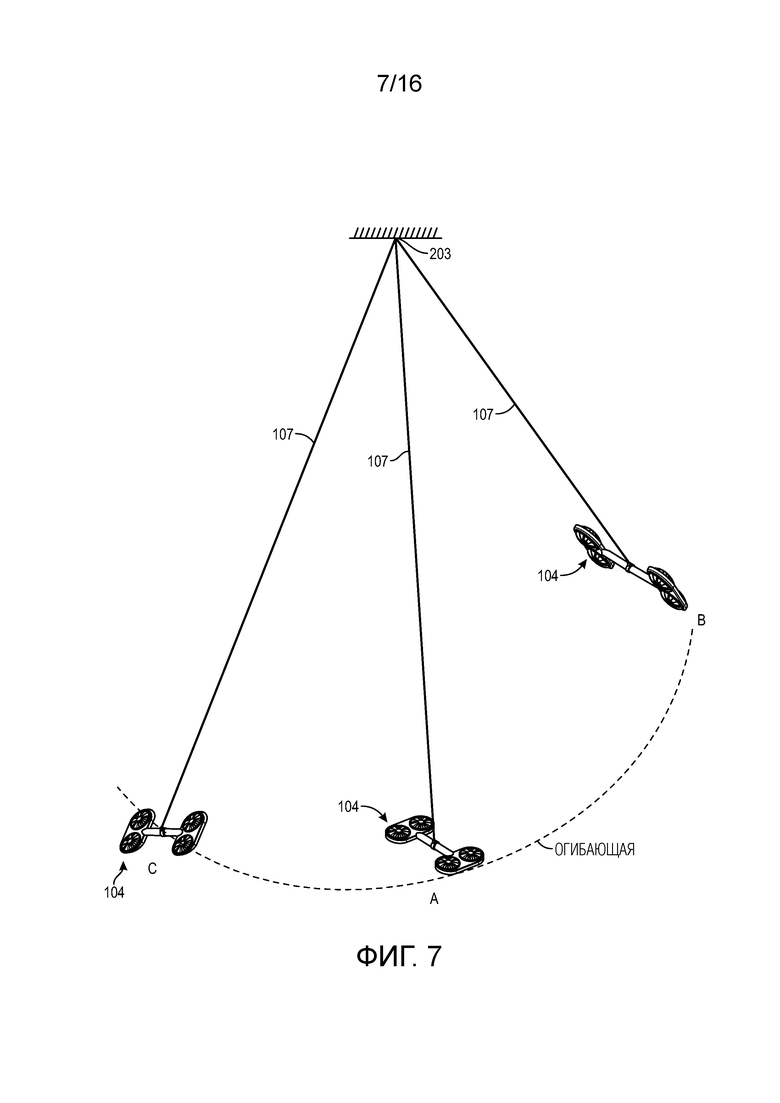
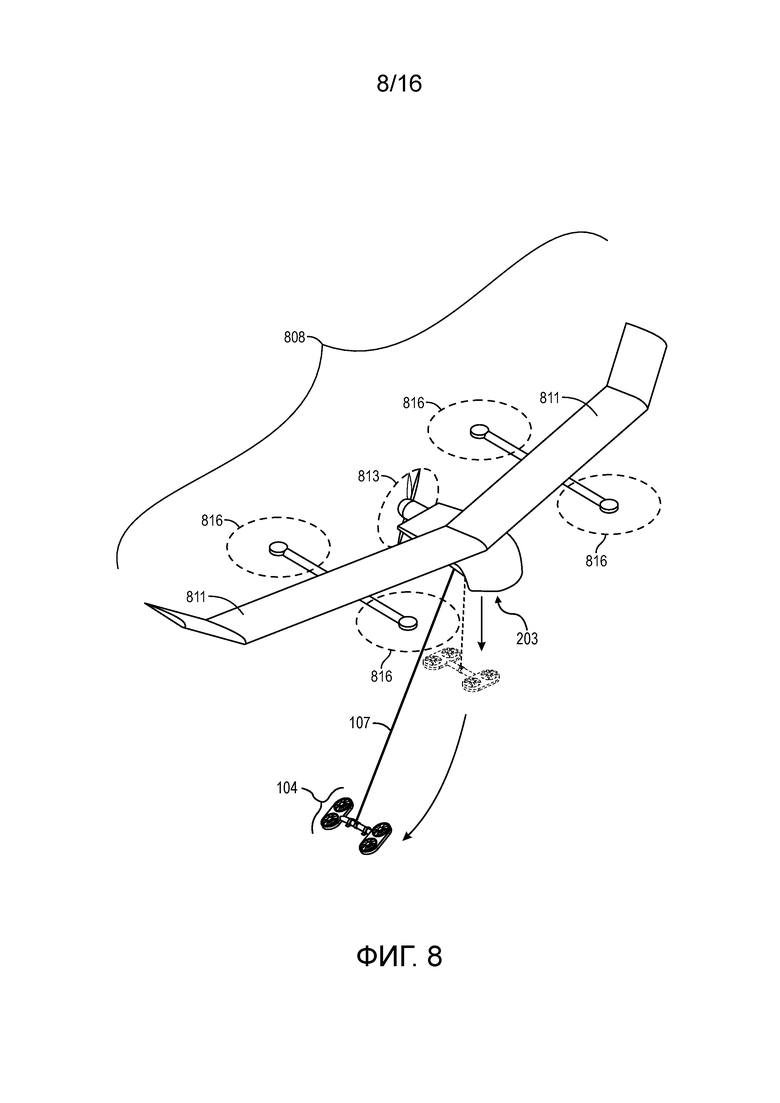

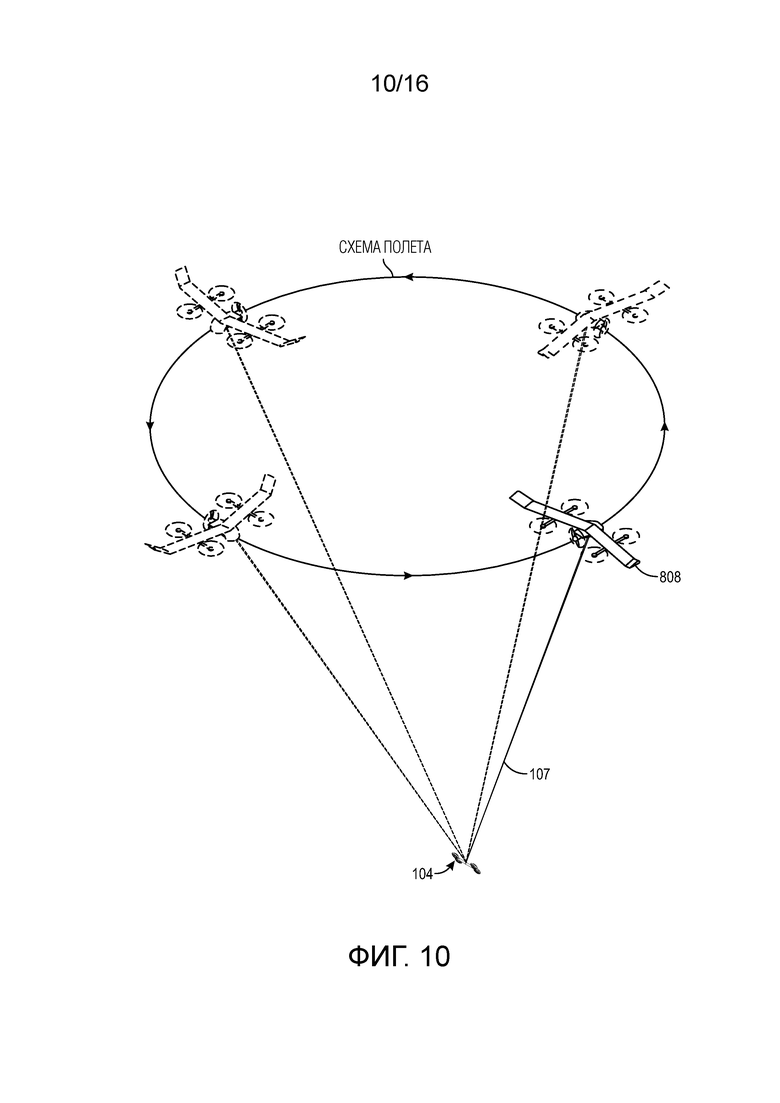
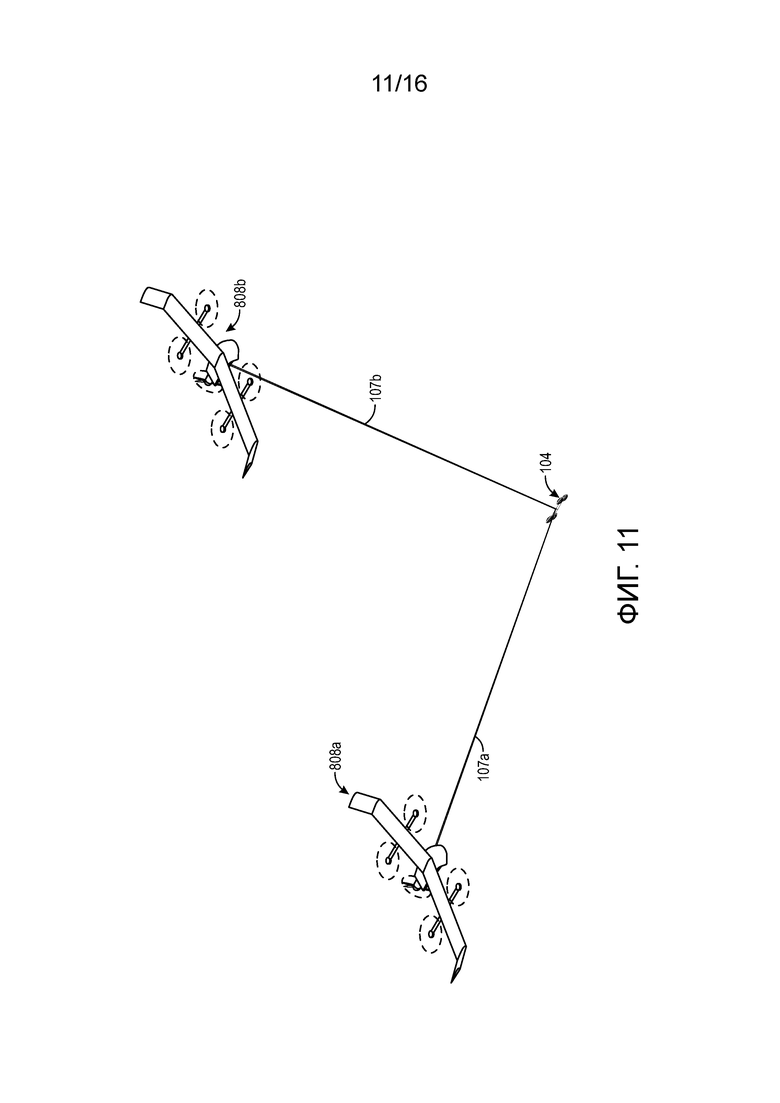
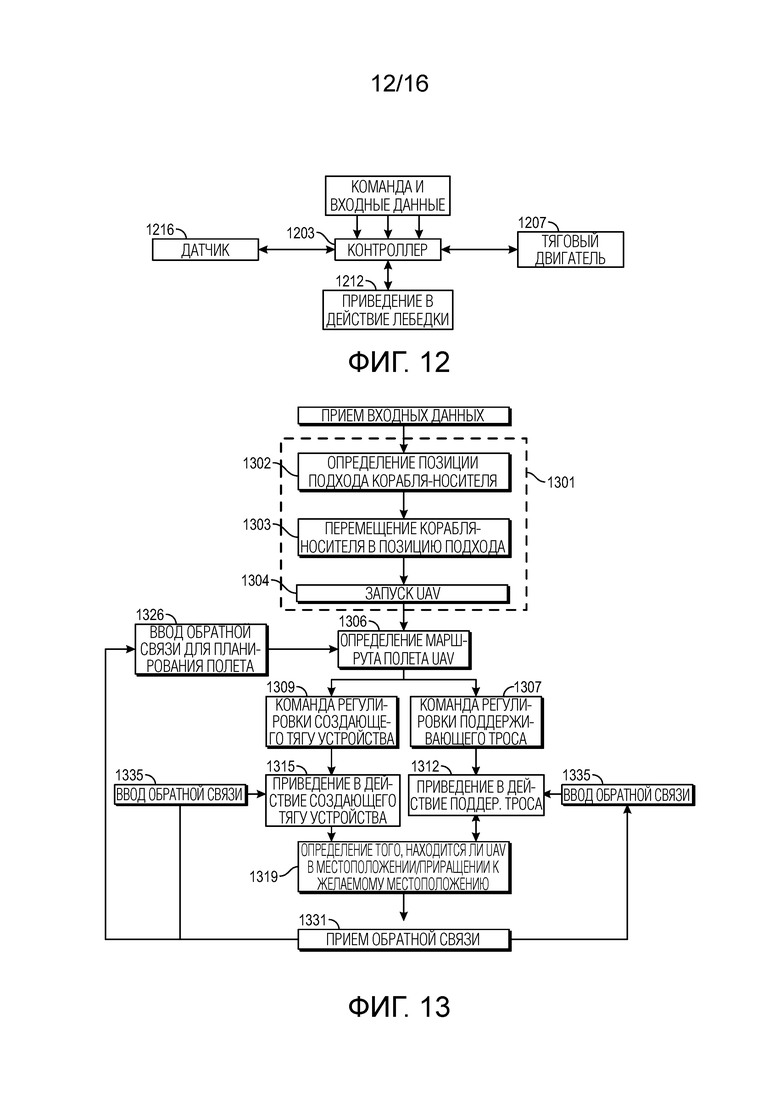
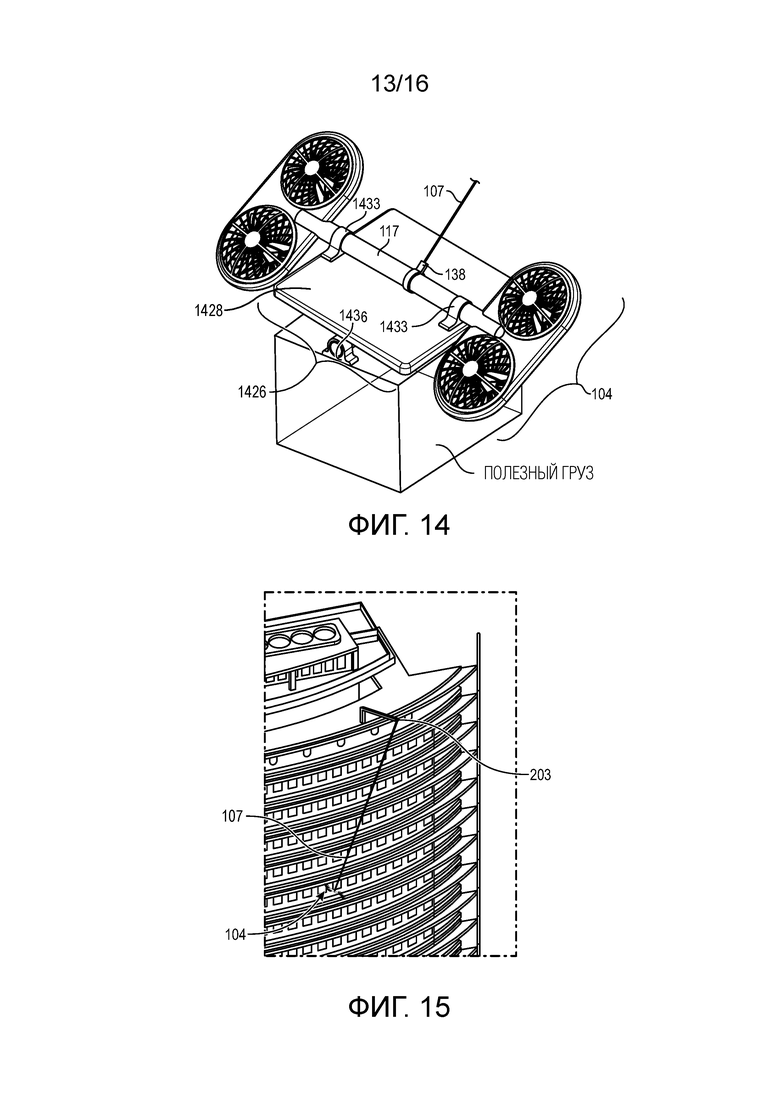

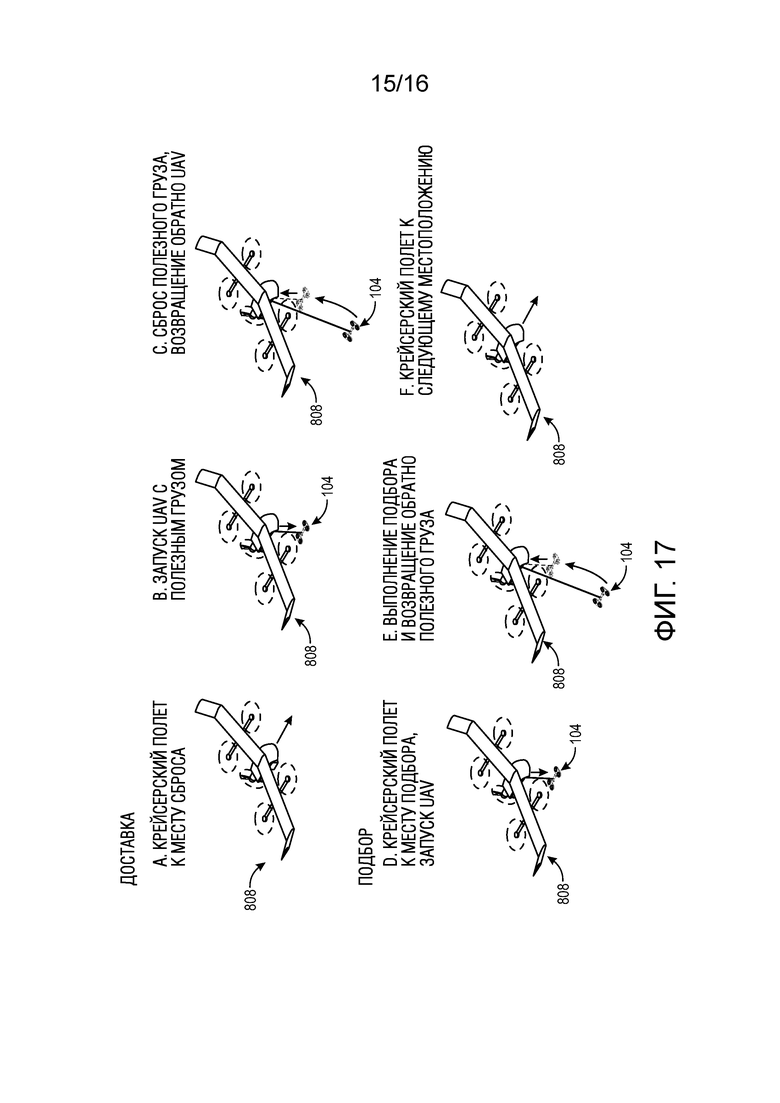
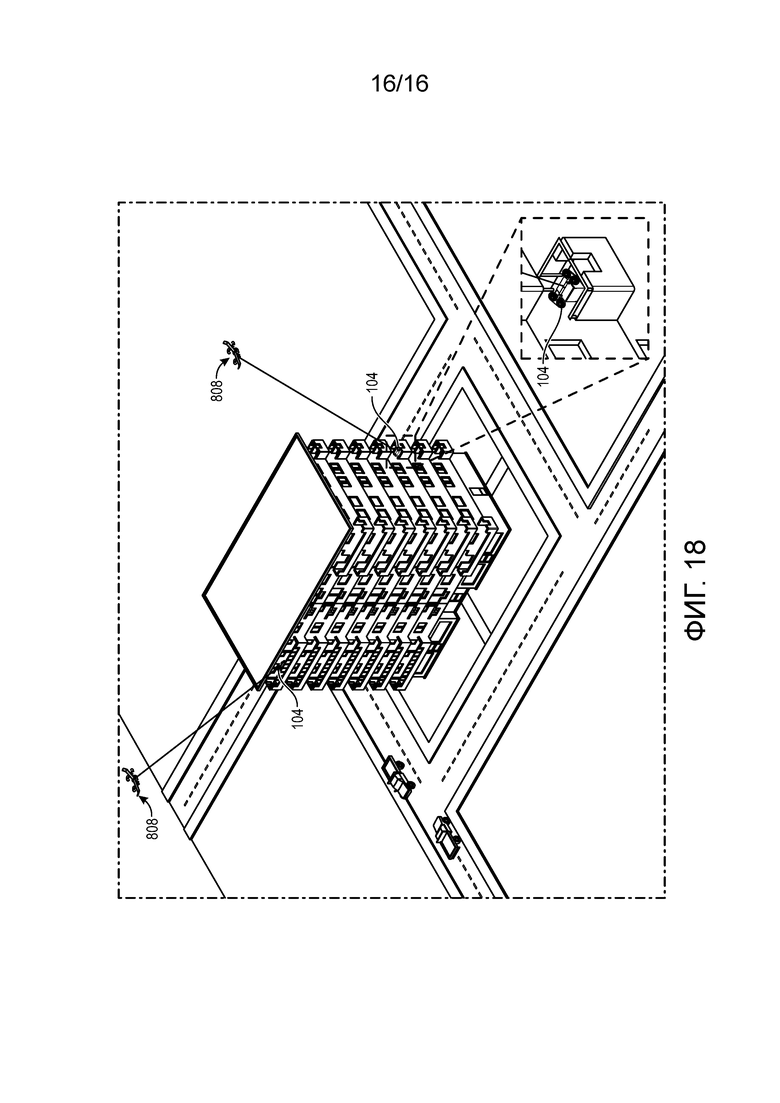
Изобретение относится к области авиации, в частности к конструкциям буксировочных систем. Подвесная система летательного аппарата содержит корабль-носитель и винтокрылый летательный аппарат, который физически соединен с кораблем-носителем поддерживающим тросом. При этом корабль-носитель является винтокрылым летательным аппаратом, создающим тягу посредством нетуннельного винта, предоставляющего возможность вертикального взлета и посадки. Летательный аппарат создает тягу посредством нетуннельного винта, предоставляющего возможность вертикального взлета и посадки. Поддерживающий трос является частью системы лебедки, которая может приводиться в действие, чтобы регулировать длину поддерживающего троса и принимать на себя большую часть вертикальной нагрузки летательного аппарата посредством наматывания поддерживающего троса, чтобы координировать натяжение в поддерживающем тросе. Обеспечивается увеличение продолжительности и грузоподъемности летательного аппарата. 2 н. и 12 з.п. ф-лы, 18 ил.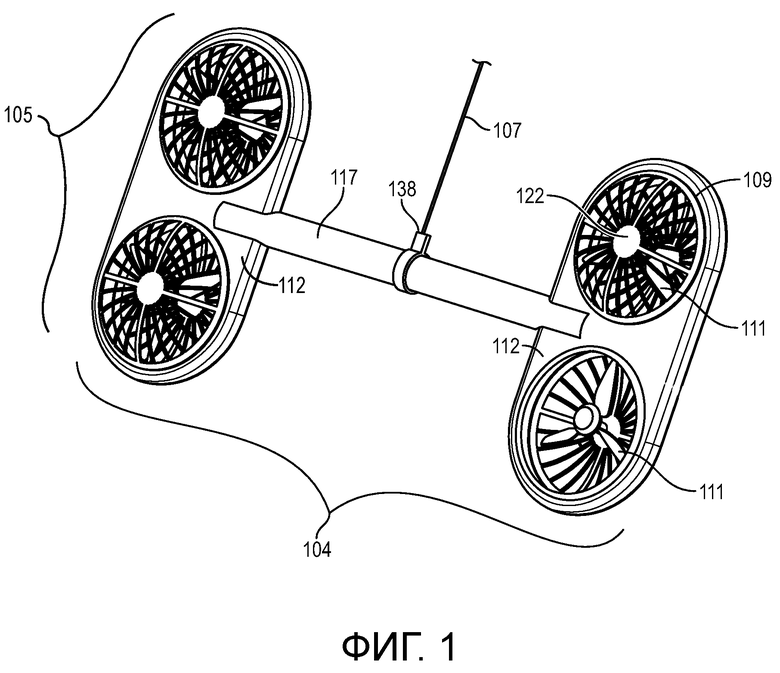
1. Подвесная система летательного аппарата, содержащая:
корабль-носитель, при этом корабль-носитель является винтокрылым летательным аппаратом, так что корабль-носитель создает тягу посредством создающих тягу устройств корабля-носителя, предоставляющих возможность вертикального взлета и посадки;
летательный аппарат, при этом летательный аппарат является винтокрылым летательным аппаратом, так что летательный аппарат создает тягу посредством создающих тягу устройств летательного аппарата, который физически соединен с кораблем-носителем поддерживающим тросом, при этом поддерживающий трос является частью системы лебедки, которая может приводиться в действие, чтобы регулировать длину поддерживающего троса; и
контроллер, выполненный с возможностью обнаружения ветрового режима на летательном аппарате и определения сопротивления давлению ветра,
при этом определение сопротивления давлению ветра содержит координацию между регулировкой величины и направления подъема создающих тягу устройств летательного аппарата и регулировкой длины и угла поддерживающего троса в сочетании,
при этом регулировка длины и угла поддерживающего троса содержит направление системы лебедки, чтобы принимать на себя большую часть вертикальной нагрузки летательного аппарата, и
при этом регулировка величины и направления подъема создающих тягу устройств летательного аппарата содержит направление создающих тягу устройств летательного аппарата для создания противоположной тяги, чтобы нейтрализовать часть усилия, создаваемого ветровым режимом.
2. Подвесная система летательного аппарата по п. 1, при этом корабль-носитель имеет (i) подъемные поверхности и воздушный винт, характерные для летательного аппарата с неподвижным крылом, и (ii) создающие тягу устройства, характерные для винтокрылого летательного аппарата.
3. Подвесная система летательного аппарата по п. 1 или 2, при этом контроллер выполнен с возможностью координирования переменной доступности тяги по невертикальным осям с углом поддерживающего троса и длиной поддерживающего троса.
4. Подвесная система летательного аппарата по п. 1, при этом корабль-носитель поддерживает по меньшей мере часть веса летательного аппарата посредством поддерживающего троса.
5. Подвесная система летательного аппарата по п. 1, при этом контроллер координирует между собой величину и направление подъема создающих тягу устройств летательного аппарата и длину и угол поддерживающего троса в сочетании, чтобы позиционировать летательный аппарат в любой точке в пределах огибающей, при этом огибающая является сферой, которая окружает систему лебедки при максимальной длине поддерживающего троса.
6. Подвесная система летательного аппарата по п. 1, дополнительно содержащая второй летательный аппарат, физически соединенный с кораблем-носителем.
7. Подвесная система летательного аппарата по п. 1, при этом позиция, поддерживаемая летательным аппаратом, является статичной относительно неподвижной контрольной точки.
8. Подвесная система летательного аппарата по п. 7, при этом неподвижная контрольная точка расположена на корабле-носителе.
9. Подвесная система летательного аппарата по п. 1, при этом координация корабля-носителя, летательного аппарата и системы лебедки содержит изменение характеристик тяги, создаваемой создающими тягу устройствами на борту летательного аппарата, изменение длины поддерживающего троса и управление схемой полета корабля-носителя.
10. Система для управления подвесной системой летательного аппарата, содержащая:
контроллер, выполненный с возможностью:
приема информации, касающейся ветрового режима на летательном аппарате, при этом летательный аппарат является винтокрылым летательным аппаратом, так что летательный аппарат создает тягу посредством создающих тягу устройств летательного аппарата;
определения сопротивления давлению ветра для летательного аппарата, содержащего
- определение регулировок, которые необходимо выполнять по отношению к длине поддерживающего троса, прикрепленного к летательному аппарату, чтобы принимать на себя большую часть вертикальной нагрузки летательного аппарата в поддерживающем тросе; и
- определение регулировок, которые необходимо выполнять по отношению к создающим тягу устройствам на летательном аппарате, чтобы создавать противоположную тягу, при этом регулировки содержат величину и направление подъема создающих тягу устройств, при этом направление подъема регулируется посредством приведения в действие угла создающих тягу устройств относительно поддерживающего троса; и
координирования манипулирования поддерживающим тросом посредством механического устройства и манипулирования создающими тягу устройствами в сочетании для того, чтобы нейтрализовать часть действия ветрового режима на позицию летательного аппарата.
11. Система для управления подвесной системой летательного аппарата по п. 10, при этом контроллер выполнен с возможностью непрерывного определения сопротивления давлению ветра, пока летательный аппарат не достигнет требуемого положения.
12. Система для управления подвесной системой летательного аппарата по п. 10, при этом контроллер выполнен с возможностью координирования между собой величины и направления подъема создающих тягу устройств и длины и угла поддерживающего троса в сочетании, чтобы позиционировать летательный аппарат в любой точке в пределах огибающей, при этом огибающая является сферой, которая окружает механическое устройство при максимальной длине поддерживающего троса.
13. Система для управления подвесной системой летательного аппарата по п. 10, при этом летательный аппарат присоединен к кораблю-носителю через поддерживающий трос.
14. Система для управления подвесной системой летательного аппарата по п. 13, при этом корабль-носитель является винтокрылым летательным аппаратом, так что корабль-носитель создает тягу посредством создающих тягу устройств, предоставляющих возможность вертикального взлета и посадки.
| БЕЗАЭРОДРОМНЫЙ АВИАЦИОННЫЙ КОМПЛЕКС | 2015 |
|
RU2591115C1 |
| US 20170024854 A1, 26.01.2017 | |||
| US 4267987 A1, 19.05.1981 | |||
| БУКСИРУЕМАЯ ПО ВОЗДУХУ ПЛАТФОРМА ДЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА, СОДЕРЖАЩАЯ СРЕДСТВА КОРРЕКЦИИ ПОЛОЖЕНИЯ, И СООТВЕТСТВУЮЩИЙ УЗЕЛ СЦЕПНОГО УСТРОЙСТВА | 2014 |
|
RU2646963C1 |
| US 20090152391 A1, 18.06.2009 | |||
| СПОСОБ УПРАВЛЕНИЯ АВИАЦИОННОЙ БУКСИРОВОЧНОЙ ТРОСОВОЙ СИСТЕМОЙ | 2009 |
|
RU2395430C1 |

