Изобретение относится к моментному рычагу (реактивной штанге) для восприятия (поглощения) приводных моментов по меньшей мере одного привода вала, имеющему два первых направляющих силу элемента, которые с возможностью поворота и на расстоянии друг от друга соответственно с помощью первого конца закреплены на приводе вала, и расположенный на расстоянии от привода вала опорный элемент, на котором с возможностью поворота и на расстоянии друг от друга с помощью второго, соответственно противолежащего первому конца закреплены первые направляющие силу элементы, и два вторых направляющих силу элемента, которые соответственно с помощью первого конца с возможностью поворота и на расстоянии друг от друга закреплены на опорном элементе, а соответственно с помощью второго, соответственно противолежащего первому конца с возможностью поворота и на расстоянии друг от друга закреплены на независимом от привода вала и неподвижно закрепленном элементе.
У известных из уровня техники приводов каландровых или валковых устройств приводные моменты воспринимаются посредством простых моментных рычагов, у которых приводы непосредственно соединены с валком и восприятие момента часто происходит через соединение с рамами машины, внешними рамами или посредством взаимного опирания двух жестких монолитных моментных рычагов. Моментный рычаг известен, например, из полезной модели DE 8712742 U1.
Посредством этого вида моментных рычагов с односторонним восприятием момента в опору вводится сила. При возникновении вращающего момента она воспринимается моментным рычагом за счет того, что моментный рычаг действует в качестве плеча рычага, на конец которого действует обратно направленная сила. Однако за счет этого возникает обратно действующая на привод сила, причем эта сила обеспечивает, что этот валок вытесняется из своего положения и в зависимости от воспринятого приводного момента это может приводить к воздействиям разной величины на точность устройства.
Поскольку при этом обратно действующая сила имеет составляющую в том же направлении действия, как и собственно каландр, она оказывает непосредственное влияние на усилие прокатки или зазор между валами.
Другая проблема, которая существует, например, в отношении моментных рычагов, которые соединены друг с другом, заключается в том, что при линейном смещении валков в горизонтальном направления, то есть при изменении зазора между валками, угловое положение валков относительно друг друга изменяется. Помимо этого, при внешнем соединении моментного рычага, то есть если точка опоры моментного рычага закреплена снаружи, существует проблема, что опора валка может свободно перемещаться лишь ограниченно.
Если вращающий момент воспринимается через две внешние точки, которые расположены на противоположных сторонах привода, то при этом не возникают обратно действующие на опору или привод силы. Однако проблема такого варианта выполнения моментного рычага заключается в том, что привод за счет использования двух точек крепления зафиксирован как вращательно, так и линейно в своем положении и, следовательно, действующие на него перемещения не могут быть полностью компенсированы или не могут перемещаться относительно другого вала.
Поэтому задачей настоящего изобретения является улучшение моментного рычага так, что за счет него, с одной стороны, на систему привода не переносятся обратно действующие силы, а с другой стороны имеется небольшое влияние моментного рычага на положение опоры валка.
Эта задача решена посредством предлагаемого моментного рычага по п. 1 формулы изобретения или посредством предложенного валкового устройства по п. 15 формулы изобретения. Предпочтительные варианты осуществления изобретения являются соответственно предметом зависимых пунктов формулы изобретения.
Согласно этому предлагается моментный рычаг для восприятия приводных моментов по меньшей мере одного привода вала, имеющий два первых направляющих силу элемента, которые соответственно с помощью первого конца с возможностью поворота и на расстоянии друг от друга закреплены на приводе вала, и расположенный на расстоянии от привода вала опорный элемент, на котором первые направляющие силу элементы с помощью второго, соответственно противолежащего первому конца закреплены с возможностью поворота и на расстоянии друг от друга, и два направляющих силу вторых элемента, которые соответственно с помощью первого конца закреплены с возможностью поворота и на расстоянии друг от друга на опорном элементе, а соответственно с помощью второго, противолежащего соответственно первому конца закреплены с возможностью поворота и на расстоянии друг от друга на независимом от привода вала и неподвижно закрепленном элементе. При этом при восприятии момента соответственно один из двух первых направляющих силу элементов является толкающим элементом и соответственно другой -тяговым элементом. Первые концы первых направляющих силу элементов могут быть расположены, прежде всего, противолежащими друг другу вокруг первой приводной оси. Опорный элемент может быть выполнен в виде плоского элемента, который по существу простирается в той же плоскости крепления, что и точки крепления направляющих силу элементов. Вторые концы первых направляющих силу элементов могут быть расположены противолежащими, и первые концы вторых направляющих силу элементов могут быть расположены противолежащими на опорном элементе. Точки крепления направляющих силу элементов могут располагаться на опорном элементе, прежде всего, так, что они определяют угловые точки квадрата. За счет этого угловые точки в этом квадрате могут попеременно определяться первым направляющим силу элементом и вторым направляющим силу элементом. Независимый неподвижный элемент может быть, прежде всего, рамой машины, независимой от каландра точкой крепления или другим приводом. Опорный элемент может быть, прежде всего, расположен в центре под приводами и ориентирован в плоскости торцовых поверхностей или параллельно торцовым поверхностям приводов.
Преимущество моментного рычага согласно изобретению заключается в том, что вращающий момент через две выполненных с возможностью поворота опоры, через которые направляющие силу элементы закреплены соответственно на приводах, передается дальше на направляющие силу элементы, из которых в зависимости от направления вращающего момента один является тяговым элементом, а другой соответственно толкающим элементом. За счет выполненной с возможностью поворота опоры системно можно лишь переносить вращающий момент в виде тяговой силы или толкающей силы. За счет этой конструкции моментному рычагу можно передавать лишь вращающей момент. В систему не вводятся никакие другие силы. Следовательно, колебания приводного момента не приводят к неточности устройства.
Прежде всего, вторые концы вторых направляющих силу элементов могут быть закреплены с возможностью поворота и на расстоянии друг от друга на втором, расположенном параллельно первому приводу вала приводе вала. При этом вторые концы вторых направляющих силу элементов могут быть расположены, прежде всего, противолежащими друг другу вокруг второй приводной оси. За счет этого может получаться зеркально симметричное размещение обоих приводов и первых и вторых направляющих силу элементов, при котором ось симметрии проходит перпендикулярно через опорный элемент. Изменение расстояния между валками с помощью моментного рычага согласно изобретению также возможно, так как опорный элемент может свободно перемещаться. За счет изменения расстояния между валками опорный элемент будет перемещаться исключительно вверх или вниз. Угловое положение обоих валком также при изменении положения валкой остается идентичным.
Кроме того, направляющие силу элементы расположены в опорах с возможностью поворота соответственно вокруг их соответствующих точек крепления. За счет этого через направляющие силу элементы на расположенный снаружи опорный элемент, который посредством выполненной с возможностью поворота опоры установлен на конце направляющего силу элемента в опоре или соединен с ней, направляются только растягивающие и сжимающие силы. То, что направляющие силу элементы установлены в опорах с возможностью поворота соответственно вокруг соответствующей точки крепления означает, что направляющие силу элементы выполнены с возможностью поворота соответственно в плоскости, перпендикулярной осевому направлению соотнесенного с ними привода. Направляющие силу элементы могут быть, прежде всего, закреплены на соответствующем приводе посредством выполненных с возможностью поворота резьбовых соединений.
Альтернативно, между соответствующим приводом и направляющим силу элементов может быть расположена опора. Кроме того, направляющий силу элемент альтернативно может быть закреплен на соответствующем приводе через шарнирное соединение.
Может быть предусмотрено, что первые концы первых направляющих силу элементов закреплены противолежащими друг другу с возможностью поворота на окружающем приводной вал первого привода вала фланце. На фланце первого привода альтернативно в качестве промежуточного элемента может быть установлена крепежная шайба, на которой в свою очередь закреплены направляющие силу элементы.
Помимо этого, может быть предусмотрено, что вторые концы вторых направляющих силу элементов закреплены противолежащими друг другу с возможностью поворота на окружающем приводной вал второго привода вала фланце. Также на фланце второго привода альтернативно в качестве промежуточного элемента может быть установлена крепежная шайба, на которой в свою очередь закреплены направляющие силу элементы.
Направляющие силу элементы могут быть закреплены соответственно на приводах так, что первая пересекающая первые концы первых направляющих силу элементов линия и вторая пересекающая вторые концы вторых элементов линия пересекаются под углом 60°-120°, предпочтительно, 80°-100°, и особо предпочтительно, 90°.
Помимо этого, на фланце первого или второго привода может быть дополнительно установлен дистанционный элемент, на котором закреплены соответствующие концы направляющих силу элементов, так что закрепленные на дистанционном элементе направляющие силу элементы и закрепленные на другом приводе направляющие силу элементы простираются в разных перпендикулярных осевому направлению плоскостях. Альтернативно, при наличии предусмотренных на фланцах крепежных шайб дистанционный элемент может быть установлен между соответствующей крепежной шайбой и соответствующим фланцем. Крепежные шайбы могут быть закреплены на соответствующем фланце посредством болтов. Дистанционный элемент может быть или непосредственно соединен с фланцем болтами или иметь находящиеся на одной линии с крепежными шайбами отверстия, через которые дистанционный элемент и соотнесенная с ним крепежная шайба вместе соединяются болтами с фланцем.
Кроме того, на опорном элементе могут быть закреплены с передней стороны передние направляющие силу элементы и с задней стороны задние направляющие силу элементы. За счет этого приводы могут свободно перемещаться относительно друг друга или опорный элемент перемещаться вверх и вниз без того, что один из направляющих силу элементов препятствовал бы названным перемещениям.
Помимо этого, закрепленные на опорном элементе концы направляющих силу элементов могут быть закреплены на опорном элементе распределенными по кругообразному контуру окружности или задавать угловые точки квадрата.
Кроме того, может быть предусмотрено, что первые направляющие силу элементы и вторые направляющие силу элементы расположены параллельно друг другу. С этим связано то, что расстояние между точками крепления первых концов направляющих силу элементов и расстояние между точками крепления вторых направляющих силу элементов соответственно одинаковы.
Помимо этого, один из первых и один из вторых направляющих силу элементов могут пересекаться между точками крепления на приводах и точками крепления на опорном элементе. Прежде всего, закрепленные на обращенной к приводам стороне опорного элемента первые и вторые направляющие силу элементы могут пересекаться между соответствующими точками крепления на приводах и соответствующими точками крепления на опорном элементе. В противоположность этому может быть предусмотрено, что соответственно другие первые и вторые направляющие силу элементы не пересекаются.
Помимо этого, вторые концы первых направляющих силу элементов и первые концы вторых направляющих силу элементов могут быть закреплены на опорном элементе противолежащими друг другу и на регулярных расстояниях.
Кроме того, за счет увеличения расстояния между обеими параллельными приводными осями обоих приводов опорный элемент может перемещаться в направлении приводных осей.
Кроме того, направляющие силу элементы могут быть выполнены в виде стержней. Прежде всего, они могут быть выполнены в виде плоских стержней. При этом все направляющие силу элементы могут иметь одинаковую длину. На первых и вторых концах первых и вторых направляющих силу элементов могут быть соответственно предусмотрены отверстия, через которые направляющие силу элементы могут быть закреплены на соответствующих точках крепления. При этом расстояние между всеми отверстиями у всех направляющих силу элементов могут быть одинаковыми. Концы направляющих силу элементов могут быть закругленными.
Кроме того, опорный элемент может быть выполнен кольцеобразным. Прежде всего, размер опорного элемента, на котором закреплены концы направляющих силу элементов, может соответствовать размеру на фланце первого и/или второго привода, на котором закреплены соответственно эти концы направляющих силу элементов. Прежде всего, опорный элемент может иметь плоское окружное кольцо, на котором на регулярных расстояниях расположены отверстия для закрепления направляющих силу элементов. Альтернативно, опорный элемент может иметь форму круглого или полигонального диска, если только обеспечивается такое как описанное выше закрепление направляющих силу элементов.
Кроме того, изобретение предлагает валковое устройство по меньшей мере с двумя расположенными параллельно, прежде всего вращающимися в противоположных направлениях, валками, между которыми образован зазор между валками, причем валки приводятся в движение посредством расположенных рядом друг с другом вращающихся в противоположных направлениях приводов вала, имеющее по меньшей мере один такой, как описанный выше моментный рычаг 1.
Приведенные в качестве примера вариант осуществления изобретения будут пояснены со ссылкой на нижеследующие фигуры. При этом показано:
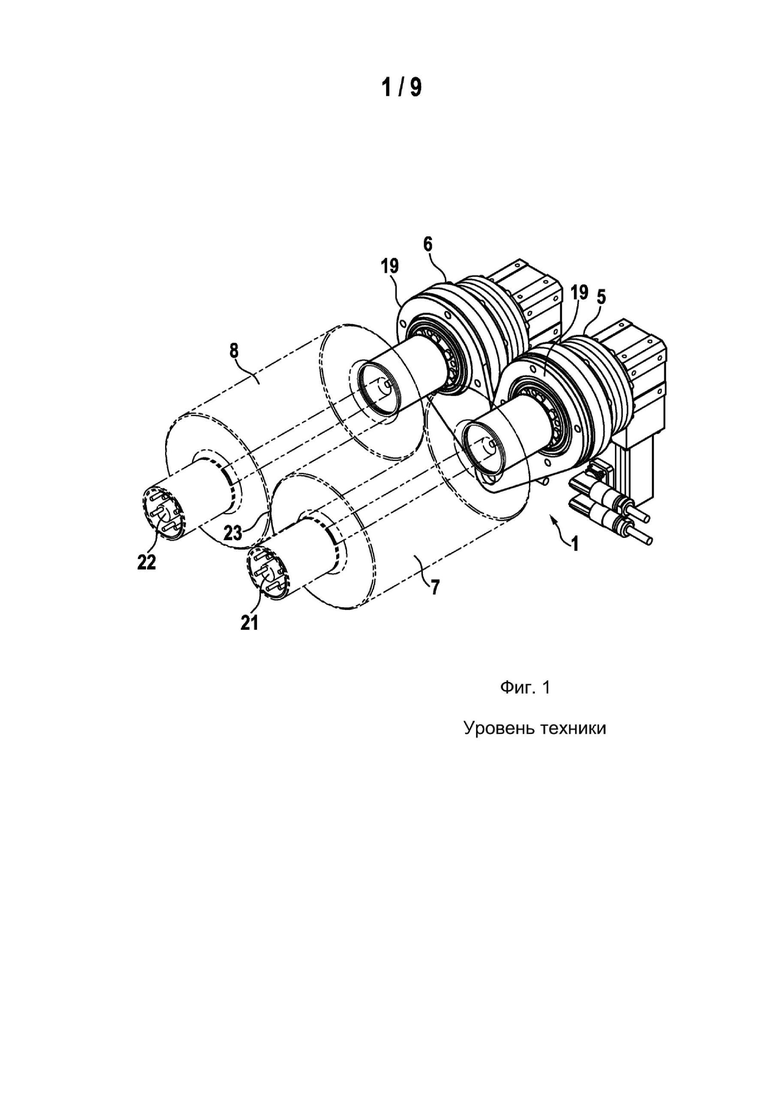
Фиг. 1 - вид в перспективе известного из уровня техники варианта выполнения двусторонне воспринимающего моментного рычага,
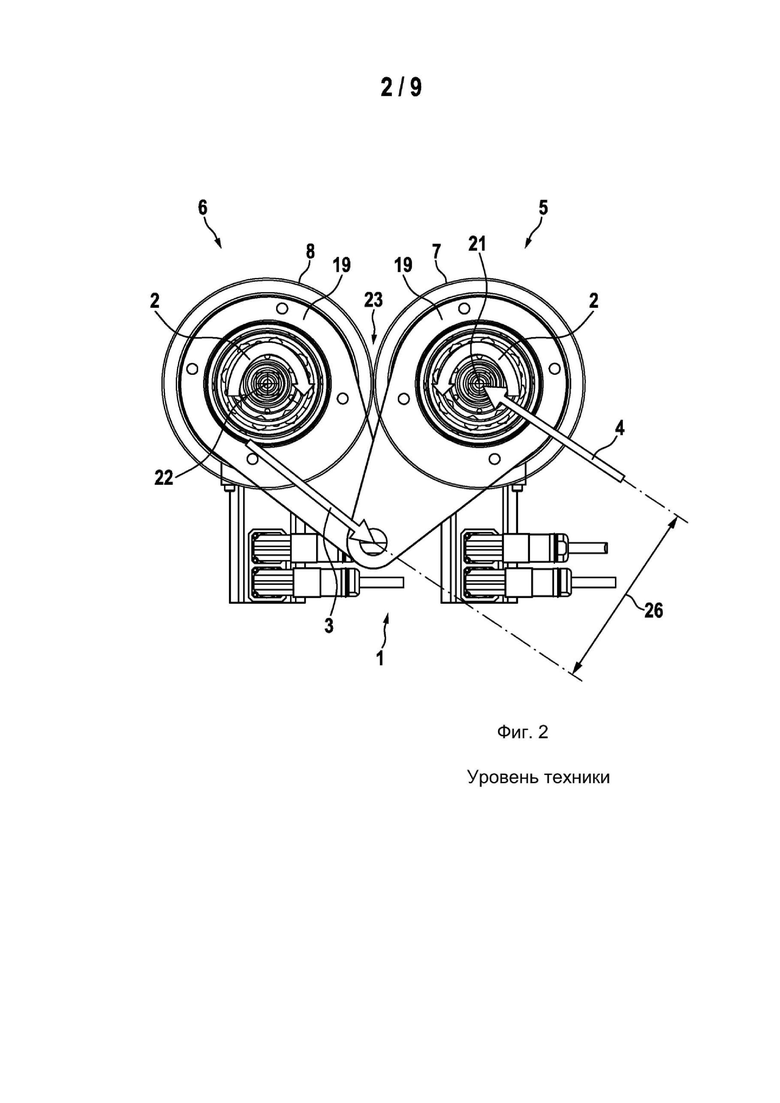
Фиг. 2 - вид спереди известного из уровня техники варианта выполнения моментного рычага согласно фиг. 1,
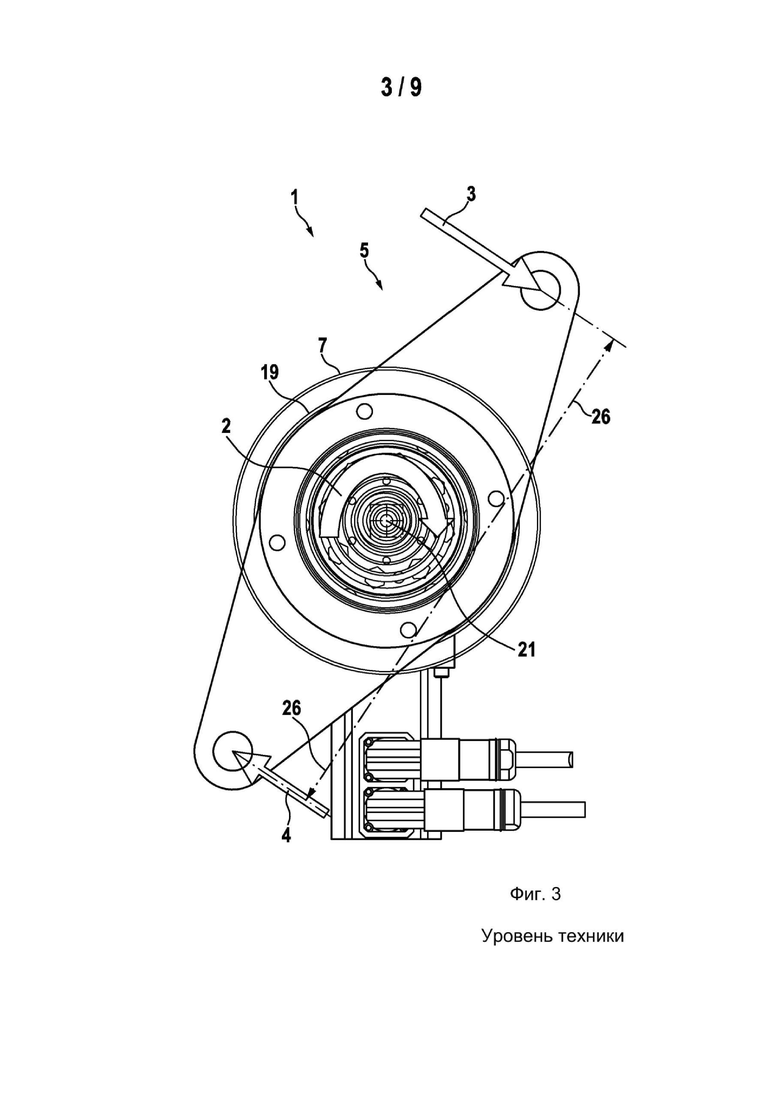
Фиг. 3 - вид спереди известного из уровня техники варианта выполнения моментного рычага с двухсторонней опорой,
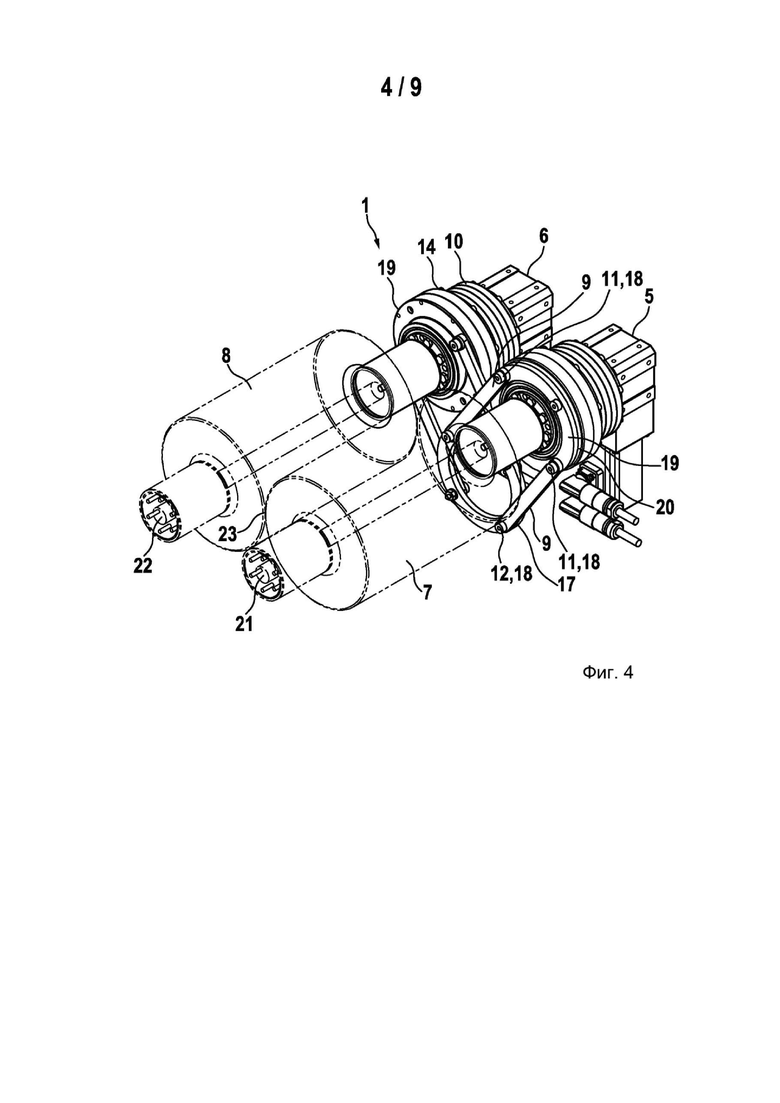
Фиг. 4 - вид спереди первого варианта выполнения моментного рычага согласно изобретению,
Фиг. 5 - вид спереди другого варианта выполнения моментного рычага согласно изобретению,
Фиг. 6 - вид в перспективе другого варианта выполнения моментного рычага согласно изобретению,
Фиг. 7 - вид спереди варианта осуществления моментного рычага согласно изобретению согласно фиг. 6,
Фиг.8 - вид в перспективе другого варианта выполнения моментного рычага согласно изобретению,
Фиг. 9 - вид спереди варианта выполнения моментного рычага согласно изобретению согласно фиг. 8.
На фиг. 1 показано известное из уровня техники решение моментного рычага 1 для восприятия вращающих моментов, у которого возникающие на приводах 5, 6 каландров или валков вращающие моменты воспринимаются через взаимно подпирающие друг друга моментные рычаги, которые с одной стороны соответственно неподвижно закреплены на фланце 19 приводов 5, 6 а с противоположной стороны скреплены друг с другом с возможностью поворота в общей точке крепления. Приводы 5, 6 непосредственно соединены с соответствующими валками 7, 8. Приводные оси 21, 22 ориентированы параллельно друг другу, так что между валками 7, 8 образован постоянный по ширине зазор 23 между валками.
Как следует из фиг. 2, за счет этого одностороннего восприятия сил в соответствующей опоре постоянно индуцируется сила. Для примера на фиг. 2 поясняется только правая сторона привода 5. Как только на стороне привода создается вращающий момент 2, этот вращающий момент 2 воспринимается моментным рычагом 1 правого привода 5 посредством силы 3 и плеча 26 рычага. Однако за счет этого возникает обратно действующая на привод 5 сила 4. Эта сила 4 обеспечивает, что валок 7 вытесняется из своего положения, и в зависимости от величины приводного момента на точность устройства могут возникать воздействия разной величины. Поскольку обратно действующая сила 4 имеет составляющую в том же направлении действия, что и направление подачи каландра, она при этом оказывает непосредственное влияние на усилие прокатки или зазор 23 между валками.
В отличие от примера из фиг. 1 и 2, показанный на фиг. 3 пример осуществления моментного рычага 1 имеет двустороннее закрепление, при котором моментный рычаг 1 имеет два противоположных плеча 26 рычага одинаковой длины. За счет двусторонне установленных в опорах моментных рычагов 1 достигается, что воспринимающая вращательный момент сила 3 и обратно действующая сила 4 двусторонне компенсируют друг друга, и за счет этого на опору не воздействует никакая сила, и влияния на зазор 23 между валками не происходит. Однако при этом привод 5 отрицательным образом закреплен в своем положение через две точки и, следовательно, не может полностью сглаживать перемещения.
Представленный на фиг. 4 первый пример осуществления моментного рычага 1 согласно изобретению показывает привод 5 вала с первым валком 7, у которого опирание вращающего момента происходит через опорный элемент 17, который, с одной стороны, через два первых направляющих силу элемента 9 соединен с фланцем 19 привода, а с другой стороны через два вторых направляющих силу элемента 10 соединен с двумя неподвижными опорами 27. Неподвижные опоры 27 могут быть внешними, то есть развязанными от привода 5 вала, элементами, такими как, например, рама машины или другие пригодные в качестве неподвижной опоры структуры. Первые направляющие силу элементы 9 первыми концами 11 закреплены с возможностью поворота в точке 18 крепления на фланце 19 первого привода 5 вала, причем при этом "с возможностью поворота", прежде всего, означает "в плоскости, перпендикулярной оси 21 привода вала". Первые направляющие силу элементы вторыми концами 12 также закреплены с возможностью поворота в точке 18 крепления на опорном элементе 17. При этом направляющие силу элементы 9 простираются параллельно друг другу. Это означает, что точки 18 крепления на фланце 19, с одной стороны, и опорный элемент 17, с другой стороны, имеют соответственно одно и то же расстояние друг от друга. Направляющие силу элементы выполнены в виде плоских стержней, которые, предпочтительно, состоят из металла. Опорный элемент 17 выполнен кольцеобразным из плоской детали, которая, прежде всего, имеет такую же ширину, как и направляющие силу элементы. Диаметр кольца соответствует в среднем расстоянию между точками 18 крепления. Первые направляющие силу элементы 9 расположены противолежащими друг другу на опорном элементе 17. Вторые направляющие силу элементы 10, предпочтительно, закреплены с возможностью поворота со смещением в 90° относительно первых направляющих силу элементов 9 первыми концами 13 в точках 18 крепления на опорном элементе 17. За счет этого вторые направляющие силу элементы 10 также расположены противолежащими друг другу на опорном элементе 17. Вторыми концами 14 вторые направляющие силу элементы 10 закреплены с возможностью поворота в точках 18 крепления, которые, прежде всего, выполнены в виде неподвижных опор 27. Расстояния между точками 18 крепления вторых направляющих силу элементов 10 также одинаковы, так что вторые направляющие силу элементы 10 простираются параллельно друг другу. За счет такого расположения достигается, что направляющие силу элементы передают соответственно только напряжения сжатия и растяжения, а не вращающие моменты. За счет этого по сравнению с обычными моментными рычагами заметно снижается отклонение привода от заданного положения по причине больших вращающих моментов.
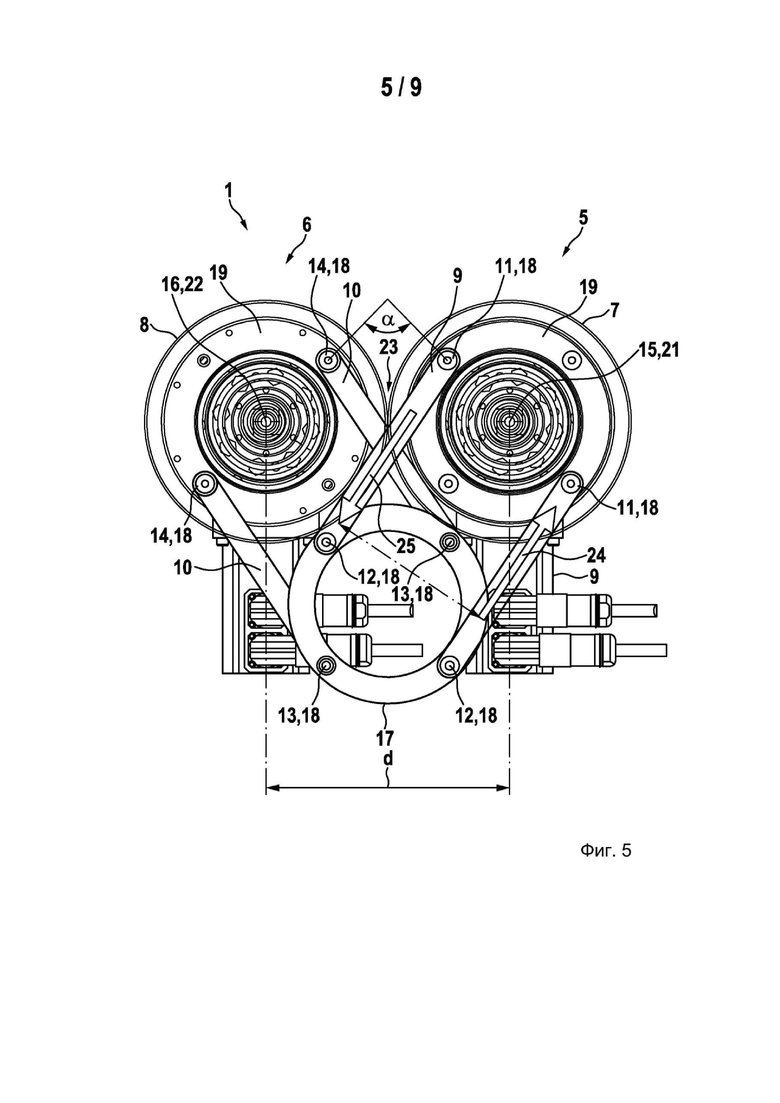
На фиг. 5 показан другой вариант выполнения моментного рычага 1, у которого два привода 5, 6 вала или два приводимых в движение приводами 5, 6 вала валки 7, 8 расположены параллельно друг другу и образуют между собой общий зазор 23 между валками. За счет этого направления вращения приводов 5, 6 всегда являются противоположными друг другу. При этом каждый из приводов 5, 6 имеет отдельный моментный рычаг 1, то есть каждый привод 5, 6 имеет отдельный первый и второй направляющий силу элемент 9, 10 и отдельные опорные элементы 17. Вторые направляющие силу элементы 10 своими вторыми концами 14 закреплены с возможностью поворота на отдельных неподвижных опорах 27. За счет моментных рычагов 1 достигается, что отклонение приводов 5, 6 от их заданных положений даже при больших вращающих моментах, например при изменении нагрузки, предотвращается, так что расстояние d между осами привода вала и соответственно этому установка зазора 23 между валками остаются постоянными.
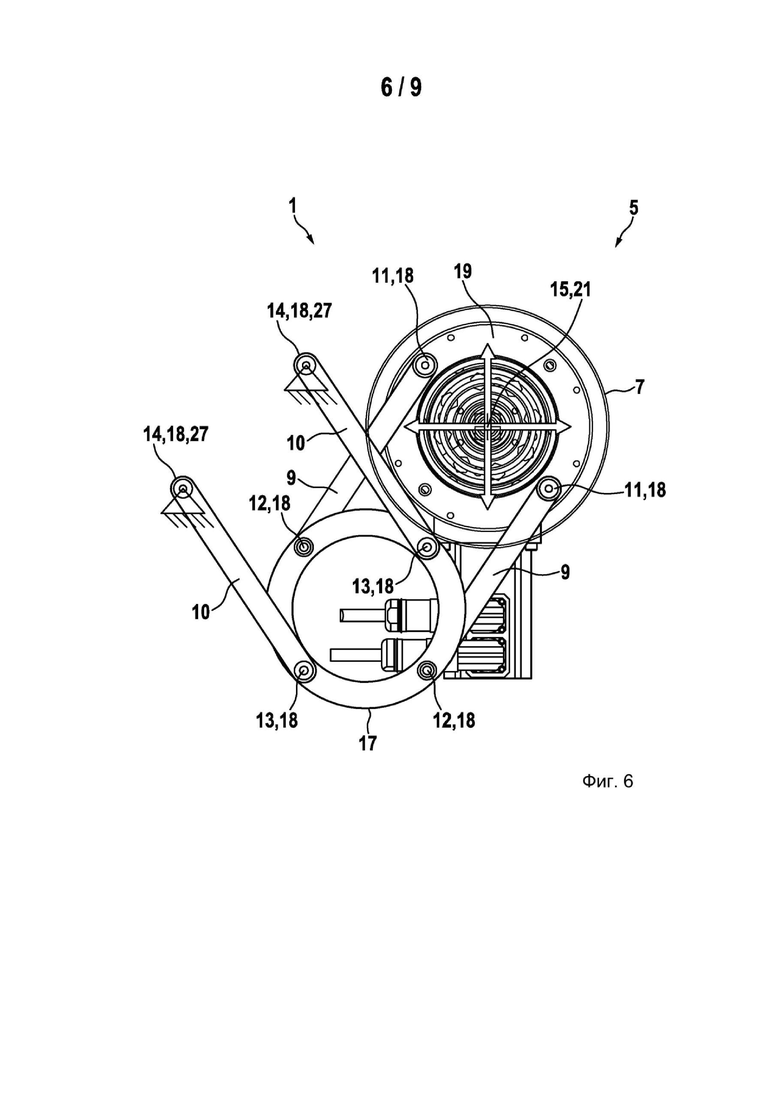
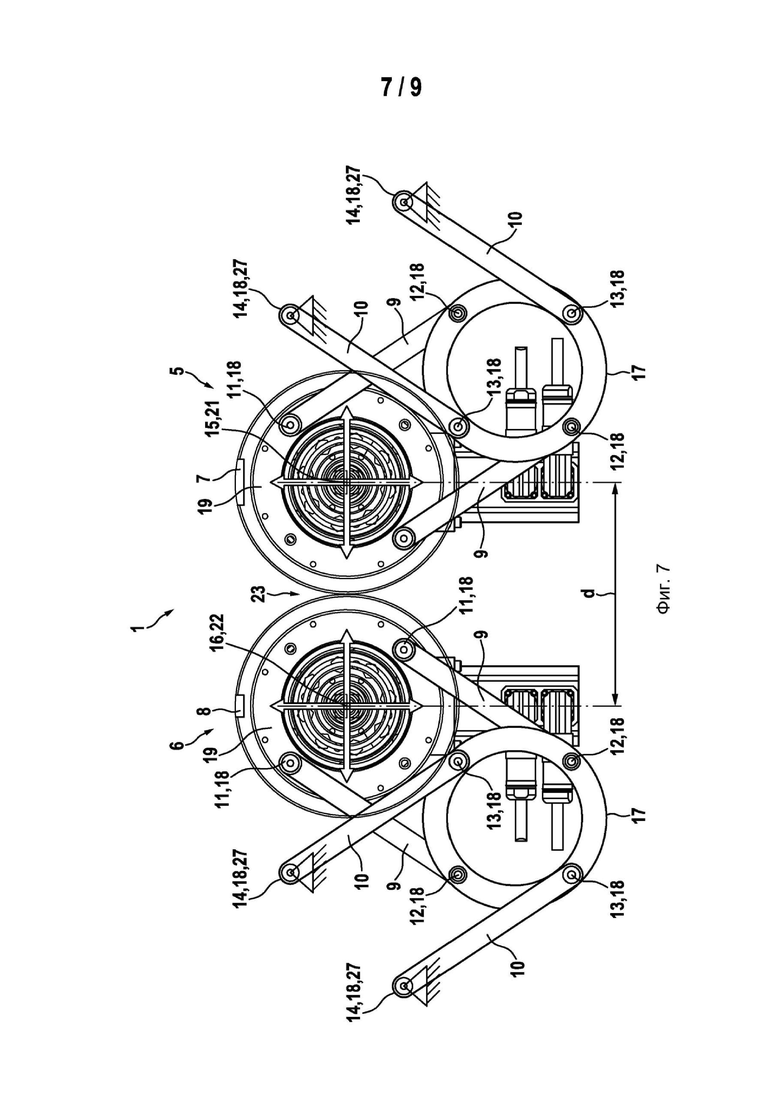
У другого варианта выполнения моментного рычага 1, показанного на фиг. 6 и 7, оба вращающихся в противоположном направлении привода 5, 6 имеют общий моментный рычаг 1, так что оба привода 5, 6 взаимно опираются друг друга. При этом момент 2 теперь отводится через соответственно два закрепленных на приводах 5, 6 направляющих силу элемента 9, 10, которые своими другими концами 12, 13 закреплены соответственно на кольцеобразном опорном элементе 17. При этом выполненные в виде плоских стержней направляющие силу элементы 9, 10 в их точках 18 крепления установлены в опорах с возможностью поворота. За счет этого направляющие силу элементы 9, 10 служат только передаче растягивающих или сжимающих сил, а не переносу вращающих моментов на опорный элемент 17. Наконец, из этого следует, что на приводы 5, 6 не воздействуют обратно действующие силы, так что также при высоких вращающих моментах не оказывается влияние на зазор 23 между валками.
К тому же на фланце 19 первого привода 5 в точках 18 крепления закреплены с возможностью поворота перпендикулярно приводной оси 21 расположенные радиально противолежащими друг другу два первых конца 11 первых направляющих силу элементов 9. Первые направляющие силу элементы 9 выполнены в виде плоских стержней и имеют одинаковую длину, и соответственно противолежащими вторыми концами 12 закреплены с возможностью поворота по окружности кольцеобразного опорного элемента 17 в соответствующих точках 18 крепления на опорном элементе 17. При этом первые направляющие силу элементы 9 выполнены с возможностью поворота параллельно плоскости, в которой простираются опорный элемент 17. Точки 18 крепления на фланце 19 и точки крепления 18 на опорном элементе 17 первых направляющих силу элементов 9 имеют одинаковые расстояния друг от друга, так что оба первых направляющих силу элемента 9 простираются параллельно друг другу.
На фланце 19 второго привода 6 в точках 18 крепления закреплены с возможностью поворота перпендикулярно приводной оси 22 расположенные радиально противолежащими друг другу два вторых конца 14 вторых направляющих силу элементов 10. Вторые направляющие силу элементы 10 также выполнены в виде плоских стержней и имеют такую же длину, как и первые направляющие силу элементы 9, и соответственно противолежащими первыми концами 13 закреплены с возможностью поворота по окружности кольцеобразного опорного элемента 17 в соответствующих точках 18 крепления на опорном элементе 17. При этом вторые направляющие силу элементы 10 выполнены с возможностью поворота параллельно плоскости, в которой простирается опорный элемент 17. Точки 18 крепления на фланце 19 и точки крепления 18 на опорном элементе 17 вторых направляющих силу элементов 10 также имеют одинаковые расстояния друг от друга, так что оба вторых направляющих силу элемента 10 простираются параллельно друг другу. Соединяющая точки крепления 18 первого направляющего силу элемента 9 на фланце 19 первого привода 5 прямая и соединяющая точки крепления 18 второго направляющего силу элемента 10 на фланце 19 второго привода 6 прямая пересекаются над валковым устройством под углом а. Посредством регулировки угла может регулироваться расстояние по вертикали опорного элемента 17 от параллельных приводных осей 21, 22 валкового устройства. Кольцеобразный опорный элемент 17 выполнен из плоского кольца, по окружности которого попеременно расположены точки 18 крепления первого и второго направляющих силу элементов 9, 10, причем первые направляющие силу элементы 9 закреплены на передней стороне, а вторые направляющие силу элементы 10 на задней стороне опорного элемента 17, так что направляющие силу элементы 9, 10 не мешают друг другу. Например, верхний первый направляющий силу элемент 9 и верхний второй направляющий силу элемент 10 пересекаются на своих участках между соответствующими точками 18 крепления на соответственно фланце 19 и опорном элементе 17, причем первый направляющий силу элемент 9 простирается перед вторым направляющим силу элементом 10 и оба в соответствующих областях перемещения не оказывают отрицательного влияния. В связи с этим на фланце 19 первого привода 5 предусмотрен дистанционный элемент 20 в форме плоской шайбы, которая установлена под крепежным элементом, на котором на первом приводе 5 закреплен первый направляющий силу элемент 9. При этом дистанционный элемент 20 имеет приблизительно сумму толщин второго направляющего силу элемента 10 и опорного элемента 17 для компенсации образующейся разности по толщине.
Также возможно изменение расстояния d между приводными осями 21, 22 или зазора 23 между валками, так как опорный элемент 17 за счет выполненной с возможностью поворота установки в опорах направляющих силу элементов 9, 10 может перемещаться вверх и вниз. При этом угловое положение обоих валков 7, 8 при регулировании расстояния между валками может сохраняться.
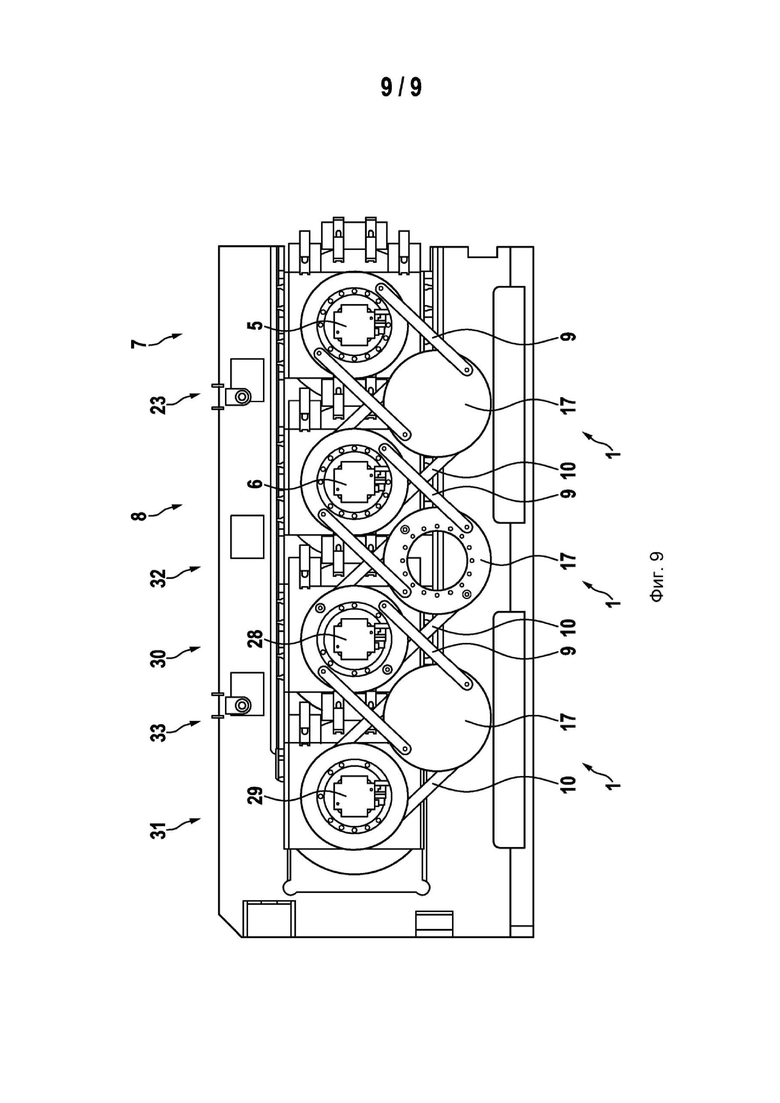
На фиг. 8 и 9 показан другой вариант осуществления изобретения, в котором четыре валка 7, 8, 30, 31 распложены параллельно друг другу с образованием трех зазоров 23, 32, 33. При этом соседние валки вращаются соответственно в противоположных направлениях. Прежде всего, у показанного устройства предусмотрены два моментного рычага 1 с тремя опорными элементами 17, которые расположены соответственно внизу между двумя валками. У этого варианта выполнения с обоими расположенными внутри приводами 6, 28 вала соотнесены соответственно два соседних моментного рычага 1. Вследствие этого на фланцах 19 приводов 6, 28 закреплены с возможностью поворота соответственно четыре направляющих силу элемента 9, 10, причем два первых направляющих силу элемента 9 закреплены на расположенном слева внизу опорном элементе 17 и два вторых направляющих силу элемента 10 закреплены на расположенном справа внизу опорном элементе 17. В показанном варианте выполнения первые направляющие силу элементы 9 при этом простираются соответственно в одной плоскости с передней стороны опорного элемента 17 и вторые направляющие силу элементы 10 простираются в одной плоскости с задней стороны опорного элемента 17. На приводах 5, 6, 28, 29 установлены соответствующие этому дистанционные элементы 20, за счет которых обеспечиваются разные плоскости крепления для первых и вторых направляющих силу элементов 9, 10. Разумеется, что принцип показанного варианта выполнения может альтернативно применяться на любом количестве расположенных рядом друг с другом приводов вала.
Раскрытые в вышеизложенном описании, на фигурах, а также в пунктах формулы изобретения признаки изобретения являются существенными для осуществления изобретения как отдельно, так и в любых комбинациях.
ПЕРЕЧЕНЬ ССЫЛОЧНЫХ ОБОЗНАЧЕНИЙ
1 моментный рычаг
2 вращающий момент
3 воспринимающая сила
4 обратно действующая на привод сила
5 первой привод вала
6 второй привод вала
7 первый валок
8 второй валок
9 первый направляющий силу элемент
10 второй направляющий силу элемент
11 первый конец первого направляющего силу элемента
12 второй конец первого направляющего силу элемента
13 первый конец второго направляющего силу элемента
14 второй конец второго направляющего силу элемента
15 первый приводной вал
16 второй приводной вал
17 опорный элемент
18 точка крепления
19 фланец
20 дистанционный элемент
21 первая приводная ось
22 вторая приводная ось
23 зазор между валками
24 растягивающая сила
25 сжимающая сила
26 плечо рычага
27 неподвижная опора
28 третий привод вала
29 четвертый привод вала
30 третий валок
31 четвертый валок
32 второй зазор между валками
33 третий зазор между валками
d расстояние между приводами
а угол между осями точек крепления
| название | год | авторы | номер документа |
|---|---|---|---|
| Моментный рычаг | 2024 |
|
RU2836499C1 |
| ТЕСТОВЫЙ РЫЧАГ | 2004 |
|
RU2318718C2 |
| УСТРОЙСТВО ПОДАЧИ ПРОВОЛОКИ | 1997 |
|
RU2125926C1 |
| РЫЧАГ СТЕКЛООЧИСТИТЕЛЯ И СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ | 2012 |
|
RU2586788C2 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО | 1997 |
|
RU2119681C1 |
| ЗАЩИТНАЯ КОБУРА СО СТОПОРНЫМ РЫЧАГОМ | 2004 |
|
RU2365850C2 |
| РЫЧАГ ЩЕТКИ СТЕКЛООЧИСТИТЕЛЯ | 2012 |
|
RU2605235C2 |
| УСТРОЙСТВО ДЛЯ СОЕДИНЕНИЯ ДВУХ ВАЛОВ И СНАБЖЕННОЕ ИМ СЦЕПНОЕ УСТРОЙСТВО | 2020 |
|
RU2803902C2 |
| СПОСОБ ПЕРЕСЕЧЕНИЯ РЫЧАГОВ И РЫЧАЖНОЕ СОЕДИНЕНИЕ ПЕРЕСЕКАЮЩИЕСЯ РЫЧАГИ СТРЕКОЗА | 2021 |
|
RU2831775C2 |
| УСТРОЙСТВО ДЛЯ ВЕРТИКАЛЬНОЙ ОТТЯЖКИ ПОЛОТНА НА АВТОМАТИЧЕСКОЙ ТРИКОТАЖНОЙ МАШИНЕ, ПРЕИМУЩЕСТВЕННО ПЛОСКОВЯЗАЛЬНОЙ | 1992 |
|
RU2078861C1 |

Изобретение относится к моментному рычагу и валковому устройству. Моментный рычаг имеет два первых направляющих силу элемента, которые с возможностью поворота и на расстоянии друг от друга соответственно с помощью первого конца закреплены на приводе вала, и расположенный на расстоянии от привода вала опорный элемент, на котором с возможностью поворота и на расстоянии друг от друга с помощью второго, соответственно противолежащего первому, конца закреплены первые направляющие силу элементы, и два вторых направляющих силу элемента, которые соответственно с помощью первого конца с возможностью поворота и на расстоянии друг от друга закреплены на опорном элементе, а соответственно с помощью второго, соответственно противолежащего первому, конца с возможностью поворота и на расстоянии друг от друга закреплены на независимом от привода вала и неподвижно закрепленном элементе. Валковое устройство по меньшей мере с двумя расположенными параллельно, прежде всего вращающимися в противоположных направлениях, валками, между которыми образован соответственно зазор между валками, причем валки приводятся в движение через расположенные рядом друг с другом, вращающиеся в противоположных направлениях приводы валов, имеющее по меньшей мере один моментный рычаг. Обеспечивается улучшение моментного рычага так, что за счет него, с одной стороны, на систему привода не переносятся обратно действующие силы, а с другой стороны имеется небольшое влияние моментного рычага на положение опоры валка. 2 н. и 13 з.п. ф-лы, 9 ил.
1. Моментный рычаг (1) для восприятия приводных моментов по меньшей мере одного привода (5) вала, имеющий:
привод (5) вала и два первых направляющих силу элемента (9), которые соответственно с помощью первого конца (11) привода (5) вала закреплены с возможностью поворота и на расстоянии друг от друга, и
расположенный на расстоянии от привода (5) вала опорный элемент (17), на котором первые направляющие силу элементы (9) соответственно с помощью второго, противолежащего соответственно первому, конца (12) закреплены соответственно с возможностью поворота и на расстоянии друг от друга, и
независимый от привода (5) вала и неподвижный элемент, а также два вторых направляющих силу элемента (10), которые соответственно с помощью первого конца (13) закреплены на расстоянии друг от друга на опорном элементе (17), а соответственно с помощью второго, противолежащего соответственно первому, конца (14) закреплены на расстоянии друг от друга на независимом от привода (5) вала и неподвижном элементе, отличающийся тем, что
два вторых направляющих силу элемента (10) соответственно с помощью первого конца (13) закреплены с возможностью поворота на опорном элементе (17), а соответственно с помощью второго конца (14) закреплены с возможностью поворота на независимом от привода (5) и неподвижном элементе.
2. Моментный рычаг (1) по п. 1, имеющий второй, расположенный параллельно первому приводу (5) вала, прежде всего вращающийся в противоположном направлении, привод (6) вала, причем вторые концы (14) вторых направляющих силу элементов (10) закреплены с возможностью поворота и на расстоянии друг от друга на втором приводе (6) вала.
3. Моментный рычаг (1) по п. 1 или 2, причем направляющие силу элементы (9, 10) установлены в опорах с возможностью поворота соответственно вокруг их соответствующих точек (18) крепления.
4. Моментный рычаг (1) по одному из предшествующих пунктов, имеющий окружающий приводной вал первого привода (5) вала первый фланец (19), причем первые концы (11) первых направляющих силу элементов (9) закреплены противолежащими друг другу с возможностью поворота на первом фланце (19).
5. Моментный рычаг (1) по одному из пп. 2-4, имеющий окружающий приводной вал второго привода (6) вала второй фланец (19), причем вторые концы (14) вторых направляющих силу элементов (10) закреплены противолежащими друг другу с возможностью поворота на втором фланце (19).
6. Моментный рычаг (1) по одному из пп. 2-5, причем на фланце (19) первого или второго привода (5, 6) дополнительно установлен дистанционный элемент (20), на котором закреплены соответствующие концы направляющих силу элементов (9, 10), так что закрепленные на дистанционном элементе (20) направляющие силу элементы (9, 10) и закрепленные на другом приводе направляющие силу элементы (9, 10) простираются в разных перпендикулярных осевому направлению приводных валов плоскостях.
7. Моментный рычаг (1) по п. 6, причем передние направляющие силу элементы (9) закреплены на опорном элементе (17) с передней стороны, а задние направляющие силу элементы (10) - с задней стороны.
8. Моментный рычаг (1) по одному из предшествующих пунктов, причем закрепленные на опорном элементе (17) концы (12, 13) направляющих силу элементов (9, 10) закреплены на опорном элементе (17) распределенными по кругообразному контуру.
9. Моментный рычаг (1) по одному из предшествующих пунктов, причем первые направляющие силу элементы (9) и вторые направляющие силу элементы (10) расположены соответственно параллельно друг другу.
10. Моментный рычаг (1) по одному из пп. 2-9, причем один из первых и один из вторых направляющих силу элементов (9, 10) пересекаются между точками (18) крепления на приводах (5, 6) и точками (18) крепления на опорном элементе (17).
11. Моментный рычаг (1) по одному из пп. 2-10, причем вторые концы (12) первых направляющих силу элементов (9) и первые концы (13) вторых направляющих силу элементов (10) закреплены на опорном элементе (17) соответственно противолежащими друг другу на регулярных расстояниях.
12. Моментный рычаг (1) по одному из пп. 2-11, причем за счет увеличения расстояния (d) между обеими параллельными приводными осями (21, 22) обоих приводов (5, 6) опорный элемент (17) перемещается в направлении приводных осей (21, 22).
13. Моментный рычаг (1) по одному из предшествующих пунктов, причем направляющие силу элементы (9, 10) выполнены в форме стержня.
14. Моментный рычаг (1) по одному из предшествующих пунктов, причем опорный элемент (17) выполнен кольцеобразным.
15. Валковое устройство по меньшей мере с двумя расположенными параллельно, прежде всего вращающимися в противоположных направлениях, валками (7, 8), между которыми образован соответственно зазор (23) между валками, причем валки (7, 8) приводятся в движение через расположенные рядом друг с другом, вращающиеся в противоположных направлениях приводы (5, 6) валов, имеющее по меньшей мере один моментный рычаг (1) по одному из предшествующих пунктов.
| DE 8712742 U1, 05.11.1987 | |||
| EA 201650052 A2, 31.05.2017 | |||
| Устройство для удаления шлака | 1976 |
|
SU775525A1 |
| БЫТОВОЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ИЗМЕЛЬЧИТЕЛЬ ЗЕРНА И БЫТОВОЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРОГРАММНО-УПРАВЛЯЕМЫЙ ИЗМЕЛЬЧИТЕЛЬ ЗЕРНА | 1992 |
|
RU2065767C1 |
| CN 109261262 A, 25.01.2019. | |||
