Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к мелющей среде, приспособленной для измерения одной или более физических характеристик измельчающего устройства во время работы и/или загрузки, находящейся в устройстве. В частности, настоящее изобретение относится к свободно движущейся мелющей среде, приспособленной для измерения, сбора и передачи одной или более физических характеристик измельчающего устройства и/или находящейся в нем загрузки во время процесса измельчения.
[0002] Настоящее изобретение также относится к способу и системе оптимизации контура измельчения с использованием указанной мелющей среды.
Уровень техники
[0003] Приведенное ниже обсуждение уровня техники изобретения предназначено для облегчения понимания описанных вариантов осуществления. Однако, следует понимать, что обсуждение не является подтверждением или признанием того, что какой-либо упоминаемый материал был опубликован, известен или является частью общеизвестных знаний на дату приоритета заявки.
[0004] В рудном теле наибольшая часть минеральной фракции очень тонко вкраплена или связана с фракцией материалов отходов («пустой породы»). Измельчение представляет собой процесс, при котором размер частиц руды постепенно уменьшают, пока чистые частицы представляющего интерес минерала не «высвободятся» из матрицы пустой породы внутри горной породы и могут быть отделены с помощью физических или других средств. На горно-обогатительном комбинате измельчение происходит на последовательных операциях дробления и размалывания.
[0005] Дробление уменьшает размер несортированной руды до размеров, которые размольная мельница может уменьшать дополнительно до тех пор, пока минерал и пустая порода не будут получены по существу в виде отдельных частиц.
[0006] Размалывание осуществляют ударом и истиранием руды за счет свободного движения свободно движущейся мелющей среды, такой как стержни, шары или галька. Как правило, размалывание осуществляют на более стадиях, например, начиная со стержневой мельницы или мельницы полусамоизмельчения (SAG), после чего следует шаровая мельница и необязательно мельница доизмельчения. Между процессами помола используют сортирующие приспособления (например, грохот, гидроциклон) для отделения более мелких частиц от более крупных частиц.
[0007] Мельница полусамоизмельчения (SAG), как правило, имеет высокое относительное удлинение и использует для измельчения руды стальные шары в дополнение к большим камням. Она вращается, переворачивая свое содержимое, в результате чего происходит разрушение частиц за счет удара стального шара о руду и истирания руды о руду. Мельница снабжена футеровкой, которая выполнена из износостойкой стали, и оснащена подъемниками, которые помогают при подъеме загрузки, пока мельница вращается. Мельничная загрузка состоит из сухой руды, стальных шаров и воды, которая занимает 30-35% объема. В мельничный желоб непрерывно подают свежую руду и измельчают ее до тех пор, пока она не будет достаточно мелкой, чтобы проходить через разгрузочные решетки.
[0008] Шаровые мельницы, с другой стороны, имеют низкое относительное удлинение и вводят в действие стальные шары только для размалывания руды. Шаровые мельницы, как правило, принимают в качестве сырья мелкие частицы (например, ниже 1 мм) и размалывают их до эффективного размера (обычно ниже 200 мкм) для высвобождения минерала на стадиях разделения. Аналогично SAG-мельницам шаровые мельницы также имеют износостойкую футеровку и подъемник, который опрокидывает стальные шары и суспензию внутри мельницы.
[0009] Стержневые мельницы очень похожи на шаровые мельницы, за исключением того, что в них используют длинные стержни для мелющей среды. Стержни размалывают руду за счет опрокидывания внутри мельницы подобно мелющим шарам в шаровой мельнице. Стержневые мельницы принимают сырье приблизительно до 50 мм и производят продукт в размерном интервале от 3 до 0,5 мм. Размалывающее действие происходит за счет линейного контакта между стержнями, проходящими по длине мельницы. Стержни переворачиваются и вращаются примерно в параллельной ориентации, имитируя ряд валковых дробилок. Это приводит к преимущественному измельчению грубого материала и минимизирует образование тонких шламов.
[0010] Ввиду изменчивости материала в рудном теле операторы обычно запускают мельницы на максимальной мощности в надежде увеличить производительность.
[0011] В результате на измельчение может приходиться до 30% стоимости производства металла и приблизительно до 50% потребления энергии. Например, на золотодобывающих и медных рудниках доля энергии, потребленной в процессах дробления и размалывания, составляет от 26 до 53% от общей энергии, используемой заводом. Исследования показывают, что на измельчение приходится до двух процентов мирового потребления энергии.
[0012] Оптимизированная операция размалывания была бы предпосылкой создания энергоэффективной системы дробления частиц, и в настоящее время горнодобывающая промышленность использует моделирующее стационарное состояние устройство, интегрированное с прогностическими моделями. Однако на практике трудно сохранить стационарное состояния при проведении операции помола и, следовательно, смоделированные прогностические модели не являются точным представлением условий помола. Мониторинг данных в режиме реального времени и моделирующее стационарное состояние устройство, интегрированное с динамическими моделями, могли бы позволить операторам уменьшить расход энергии и определить подходящие условия для операции помола.
[0013] Таким образом, существует потребность в системе сбора данных в режиме реального времени, которая собирает данные внутри размольной мельницы, реагирует на изменение условий помола, определяет энергоэффективные условия для операций помола и оптимизирует размольные операции, обеспечивая целевой размер продукта и пропускную способность.
[0014] Данные, относящиеся к температуре суспензии, нарушению работы мелющей среды (скрещивание стержней или прокатка шаров), силе удара и истиранию, а также к расположению мелющей среды внутри стержневой, полусамоизмельчающей и шаровой мельницы, позволят лучше понимать динамику работы мельницы, снизить расход энергии на размол и расход воды (потерю), и помогут оптимизировать процесс. Точная регистрация этих данных возможна только при размещении датчиков внутри мельницы и измерении истинных значений в реальном времени.
[0015] Однако задача измерения в режиме реального времени внутри мельницы и последующего использования собранных данных для повышения эффективности процесса измельчения остается сложной.
[0016] В публикации заявки на патент США № 20100024518 описан инструментальный шар для сбора данных в промышленной мельнице. Устройство имеет корпус из упругого материала, в полости которого размещен сенсорный блок. Сенсорный блок определяет и проводит замеры различных физических параметров, таких как ускорение и скорость изменения пространственного положения объекта, на постоянной основе. Устройство выполнено с возможностью передачи данных в режиме реального времени через антенну на внешнее устройство.
[0017] Окружающая среда внутри мельницы во время работы, однако, по своей природе является чрезвычайно жесткой и разрушительной. Задача состоит в том, чтобы гарантировать, что среда, несущая измерительные приборы, имеет достаточный срок эксплуатации, чтобы экономически эффективным способом обеспечить проведение измерений в течение периода, приближающегося к нормальному сроку службы среды (без измерительных приборов).
[0018] Настоящее изобретение направлено на преодоление по меньшей мере некоторых из вышеупомянутых недостатков.
Сущность изобретения
[0019] Настоящее изобретение относится к мелющей среде, приспособленной для измерения одной или более физических характеристик измельчающего устройства во время работы или находящейся в нем загрузки. В частности, настоящее изобретение относится к свободно движущейся мелющей среде, приспособленной для измерения, сбора и передачи одной или более физических характеристик измельчающего устройства и/или находящейся в нем загрузки во время процесса измельчения.
[0020] Настоящее изобретение также относится к способу и системе оптимизации контура измельчения с использованием указанной мелющей среды.
[0021] В одном аспекте изобретения предложена свободно движущаяся мелющая среда, выполненная с возможностью измерения одной или более физических характеристик измельчающего устройства во время работы или находящейся в нем загрузки, причем указанная мелющая среда содержит свободно движущееся мелющее тело с отверстием, расположенным на наружной части указанного тела, и корпус датчика, выполненный с возможностью размещения в отверстии, при этом указанный корпус датчика содержит жесткую втулку, упругий сердечник и группу датчиков, встроенную в сердечник из упругого материала.
[0022] В одном варианте осуществления группа датчиков может быть расположена вблизи основания корпуса датчика. Группа датчиков может быть снабжена антенной, проходящей от группы датчиков через упругий сердечник к верхней поверхности корпуса датчика.
[0023] В некоторых вариантах осуществления группа датчиков может быть снабжена упругим кожухом.
[0024] В различных вариантах осуществления упругий сердечник может содержать первый упругий материал, и упругий кожух может содержать второй упругий материал. Первый и второй упругие материалы могут быть одинаковыми или разными. Упругий сердечник может быть способен распределять силы, приложенные к корпусу датчика, к указанному мелющему телу, тем самым рассеивая по меньшей мере некоторые из указанных сил от группы датчиков.
[0025] В одном варианте осуществления свободно движущееся мелющее тело может представлять собой мелющий стержень, имеющий противоположные концы. В этом конкретном варианте осуществления отверстие может быть расположено коаксиально в одном или каждом противоположном конце.
[0026] В альтернативном варианте осуществления свободно движущееся мелющее тело может представлять собой мелющий шар. В этом конкретном варианте осуществления отверстие может быть радиально выровнено с центром мелющего шара. В некоторых формах этого варианта осуществления отверстие может простираться до центра мелющего шара.
[0027] В еще одном варианте осуществления свободно движущееся мелющее тело может включать образец загрузки для измельчающего устройства. Например, указанный образец может представлять собой репрезентативный образец руды, которая должна быть подвергнута помолу в измельчающем устройстве.
[0028] В разных вариантах осуществления свободно движущейся мелющей среды, определенной выше, группа датчиков может содержать один или более датчиков, расположенных соответственно с возможностью измерения одной или более физических характеристик партии загрузки, находящейся внутри измельчающего устройства, причем одна или более физических характеристик выбрана из группы, включающей температуру, удар, частоту удара, скорость удара, силу удара, смещение, траекторию, объем загрузки, носок и плечо загрузки и т.д. Термин «носок и плечо загрузки», используемый здесь, относится к углу между основной частью загрузки и траекторией движения загрузки.
[0029] Альтернативно или дополнительно группа датчиков может содержать один или более датчиков, расположенных соответственно с возможностью измерения одной или более физических характеристик измельчающего устройства, причем одна или более физических характеристик выбрана из группы, включающей угол подъемника, износ подъемника, температуру, отклонение или скрещивание стержней, скорость вращения мельницы, энергоэффективность, амплитуду и/или частоту колебания, динамическую нагрузку на футеровочный болт, крутящий момент/натяжение футеровочного болта и т.д.
[0030] В альтернативном аспекте сенсорное устройство может содержать неподвижный корпус, выступающий наружу из измельчающего устройства, причем неподвижный корпус снабжен монтажной пластиной и группой датчиков, установленной на монтажной пластине.
[0031] В частности, неподвижный корпус может представлять собой футеровочный болт, выступающий наружу из кожуха мельницы измельчающего устройства.
[0032] В другом аспекте настоящее изобретение также относится к системе оптимизации производительности контура измельчения, содержащего измельчающее устройство, в ответ на одну или более физических характеристик измельчающего устройства или загрузки, находящейся в нем, измеренных во время работы измельчающего устройства, и система содержит:
множество свободно движущихся мелющих сред, определенных выше, выполненных с возможностью смешивания при использовании с рудой или другим материалом, нуждающимся в измельчении, и мелющей средой, и загружаемых в измельчающее устройство, в результате чего при использовании множество свободно движущихся мелющих сред собирают данные, соответствующие одной или более физическим характеристикам измельчающего устройства или загрузки, находящейся в нем, во время работы измельчающего устройства;
модуль обработки, выполненный с возможностью приема собранных данных от множества свободно движущихся мелющих сред для проведения анализа в режиме реального времени работы измельчающего устройства в контуре измельчения; и
систему оптимизации, выполненную с возможностью мониторинга и предоставления отчета по одной или более рабочим характеристикам контура измельчения при работе контура измельчения в соответствии с моделью процесса, при этом система оптимизации также выполнена с возможностью изменения одного или более параметров процесса в соответствии с анализом в режиме реального времени, предоставляемым модулем обработки, для улучшения производительности контура измельчения и, следовательно, обновления модели процесса.
[0033] В одном варианте осуществления система оптимизации выполнена с возможностью генерирования набора оптимизированных параметров процесса для оптимизации одной или более рабочих характеристик контура измельчения.
[0034] В одном варианте осуществления один или более параметров процесса могут быть изменены оператором вручную.
[0035] В другом варианте осуществления система оптимизации может быть выполнена с возможностью изменения одного или более параметров процесса в соответствии с указанным анализом в режиме реального времени в реальном времени или близко к реальному времени.
[0036] В другом варианте осуществления система оптимизации может быть выполнена с возможностью изменения одного или более параметров процесса в соответствии с указанным анализом в режиме реального времени для получения оптимизированной производительности контура измельчения.
[0037] В другом аспекте настоящее изобретение также относится к способу оптимизации производительности контура измельчения, содержащего измельчающее устройство, в ответ на одну или более физических характеристик измельчающего устройства или загрузки, находящейся в нем, измеренных во время работы измельчающего устройства, и способ включает:
заполнение измельчающего устройства загрузкой и множеством свободно движущихся мелющих тел, как определено выше;
работу измельчающего устройства с измельчением загрузки в соответствии с одним или более параметрами процесса, при этом во время работы множество свободно движущихся мелющих сред собирают данные, соответствующие одной или более физическим характеристикам измельчающего устройства или загрузки, находящейся в нем;
прием и обработку собранных данных с получением анализа в режиме реального времени работы измельчающего устройства в контуре измельчения; и
мониторинг и предоставление отчета по одной или более рабочим характеристикам контура измельчения и необязательно изменение одного или более параметров процесса в соответствии с анализом в режиме реального времени, тем самым генерируя набор оптимизированных параметров процесса, соответствующих одному или более параметрам процесса, для улучшения производительности контура измельчения.
[0038] В одном варианте осуществления генерирование набора оптимизированных параметров процесса может быть выполнено в режиме реального времени или близко к реальному времени в ответ на анализ в режиме реального времени работы контура измельчения.
[0039] В одном варианте осуществления загрузка содержит руду или другой материал, нуждающийся в измельчении, и мелющую среду. Загрузка может содержать суспензию руды или указанного другого материала.
[0040] В одном варианте осуществления любая свободно движущаяся мелющая среда во множестве сенсорных устройств может быть выполнена с возможностью сбора данных, соответствующих разным физическим характеристикам.
[0041] В соответствии с третьим аспектом настоящего изобретения предложена компьютерная программа, включающая по меньшей мере одну команду управления компьютерной системой для осуществления способа, определенного выше.
[0042] В соответствии с четвертым аспектом настоящего изобретения предложен машиночитаемый носитель, предоставляющий компьютерную программу в соответствии со способом, определенным выше.
[0043] В соответствии с пятым аспектом настоящего изобретения предложен контур измельчения, включающий измельчающее устройство и систему оптимизации его производительности, как определено выше.
Краткое описание чертежей
[0044] Варианты осуществления изобретения описаны в качестве примера со ссылкой на сопровождающие чертежи.
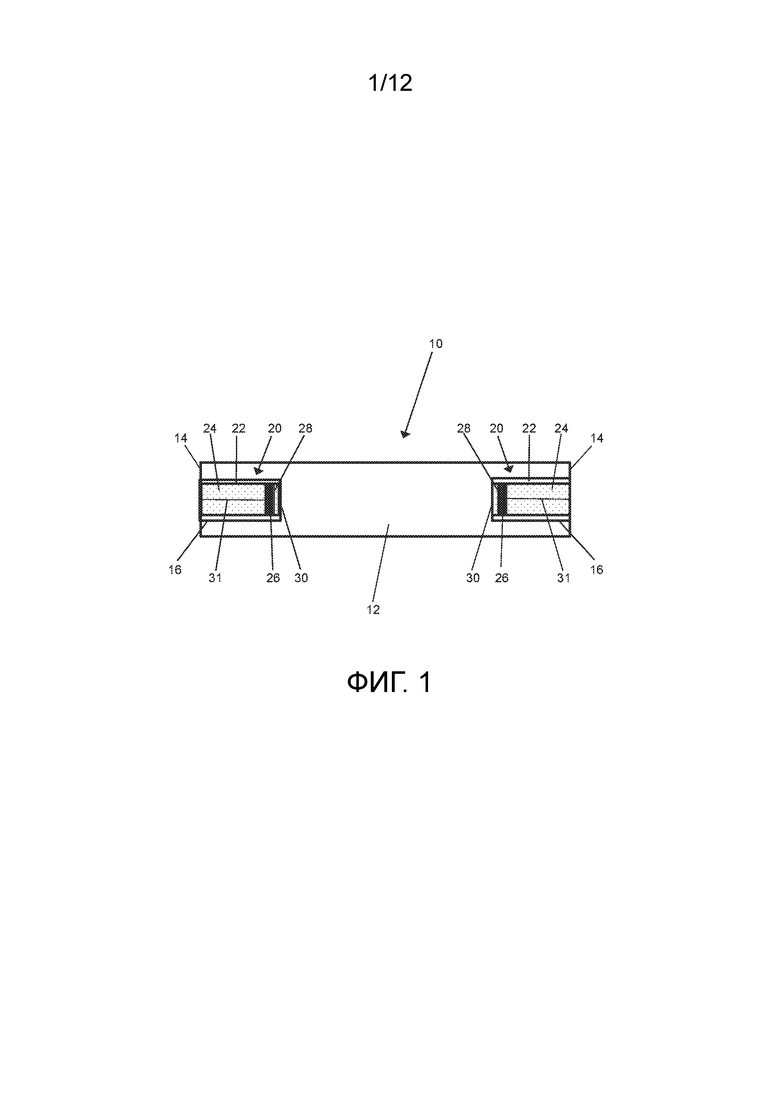
[0045] ФИГ. 1 представляет собой вид поперечного сечения свободно движущейся мелющей среды в соответствии с вариантом осуществления, раскрытым в документе.
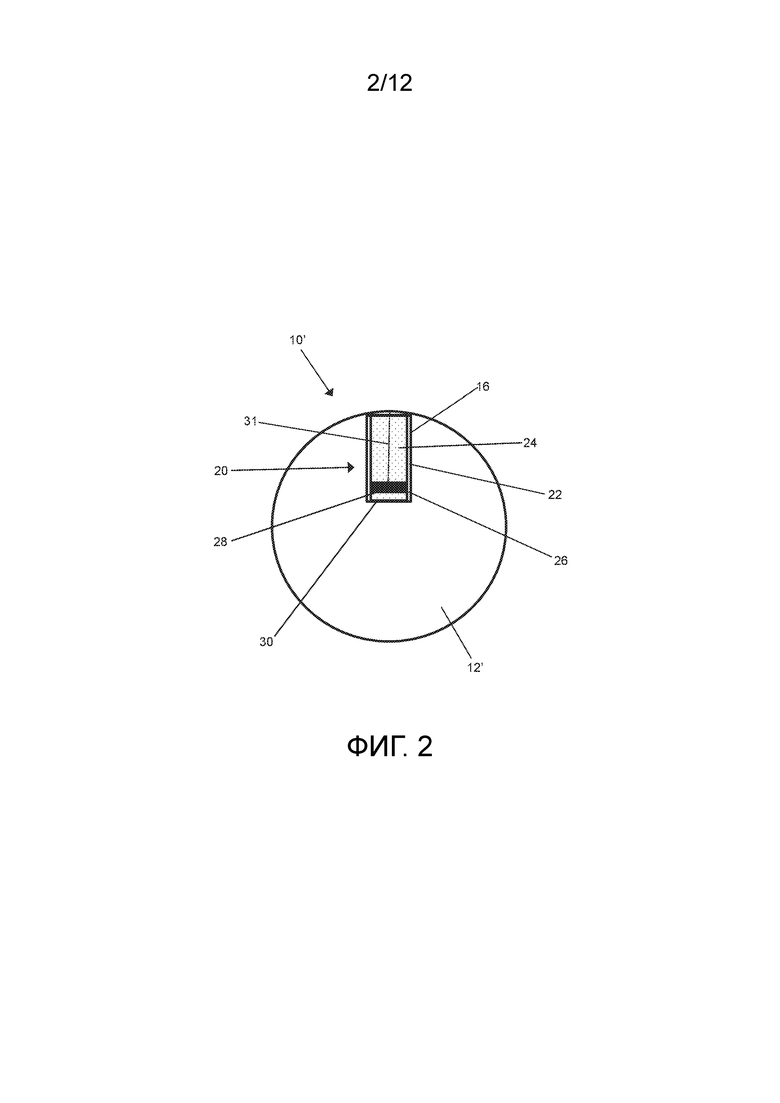
[0046] ФИГ. 2 представляет собой вид поперечного сечения альтернативного варианта осуществления свободно движущейся мелющей среды.
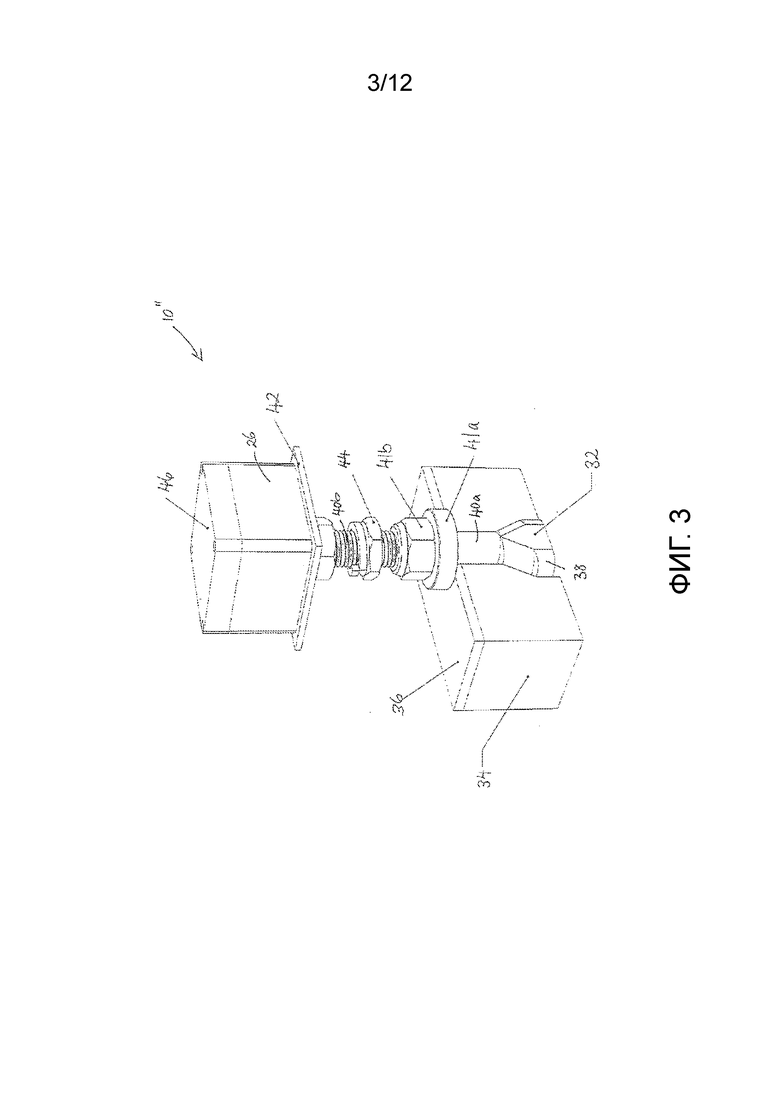
[0047] ФИГ. 3 представляет собой поперечное сечение альтернативного сенсорного устройства, раскрытого в документе.
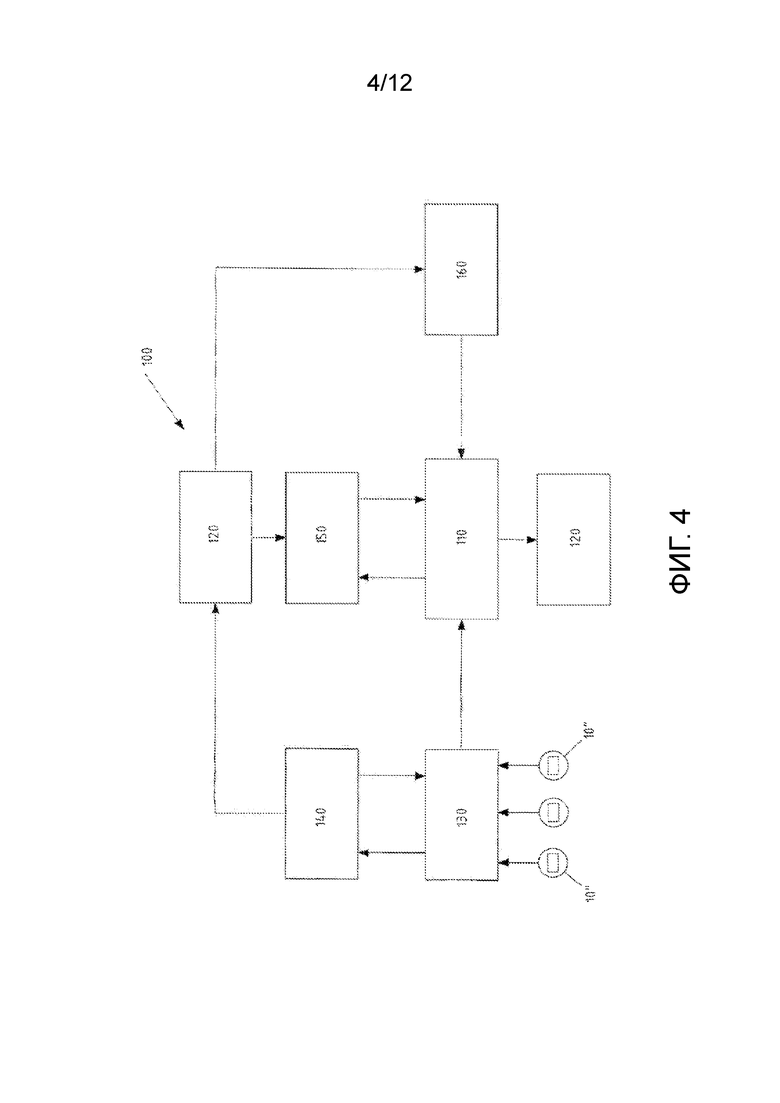
[0048] ФИГ. 4 представляет собой блок-схему, предоставляющую один вариант осуществления способа и системы оптимизации, где используют варианты осуществления свободно движущейся мелющей среды, раскрытой в изобретении.
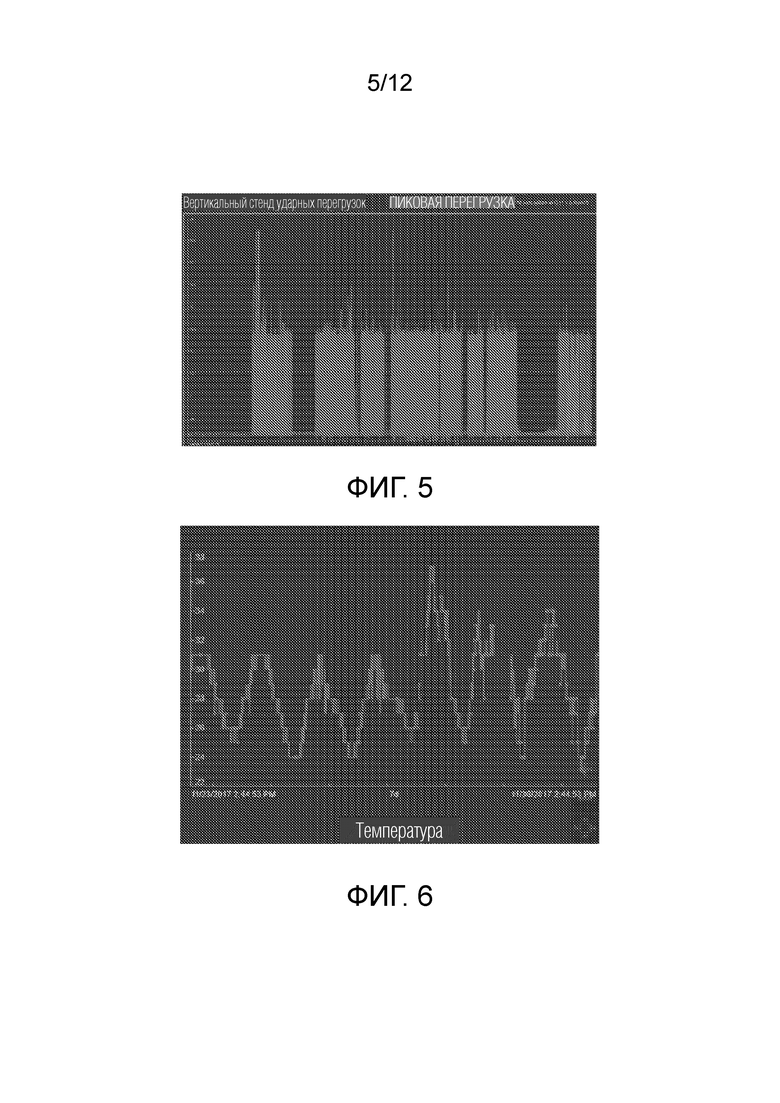
[0049] ФИГ. 5 показывает графическое представление данных, собранных от акселерометров, встроенных в свободно движущуюся мелющую среду в соответствии с одним вариантом осуществления, описанным в изобретении.
[0050] ФИГ. 6 показывает графическое представление температуры, измеренной с помощью термопары, встроенной в свободно движущуюся мелющую среду, в соответствии с другим вариантом осуществления, описанным в изобретении.
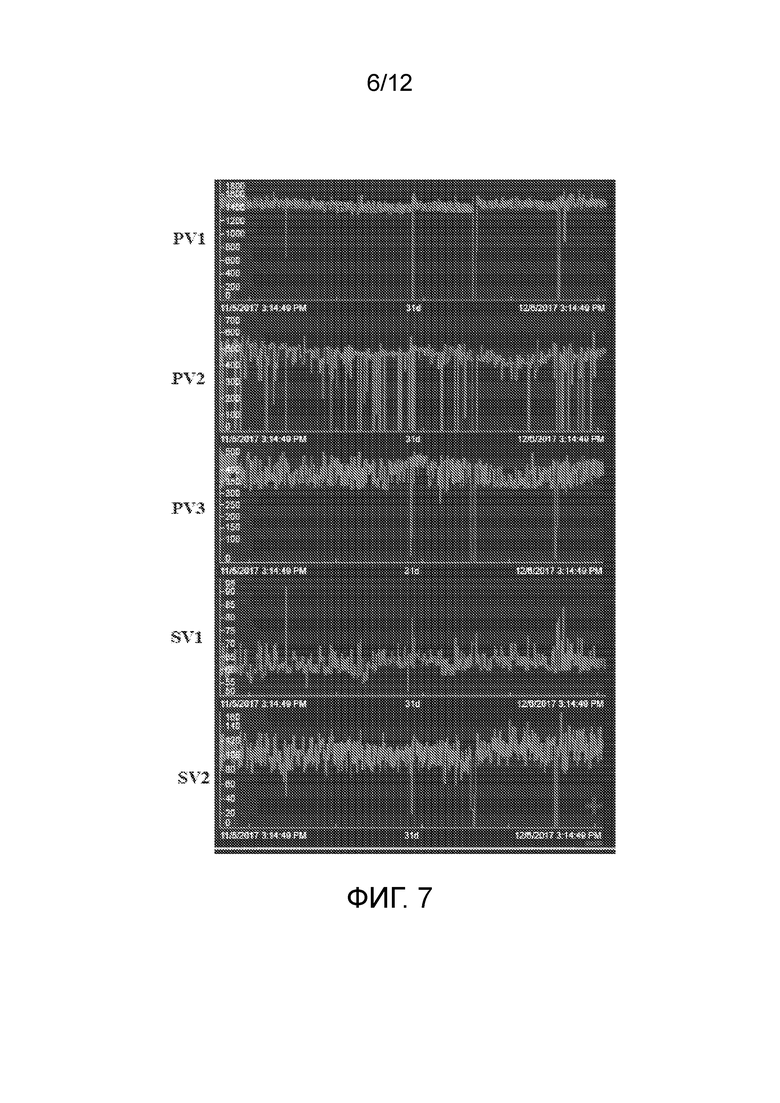
[0051] ФИГ. 7 показывает графическое представление данных мониторинга в режиме реального времени переменных процесса PV1, PV2, PV3 и данных датчиков SV1, SV2.
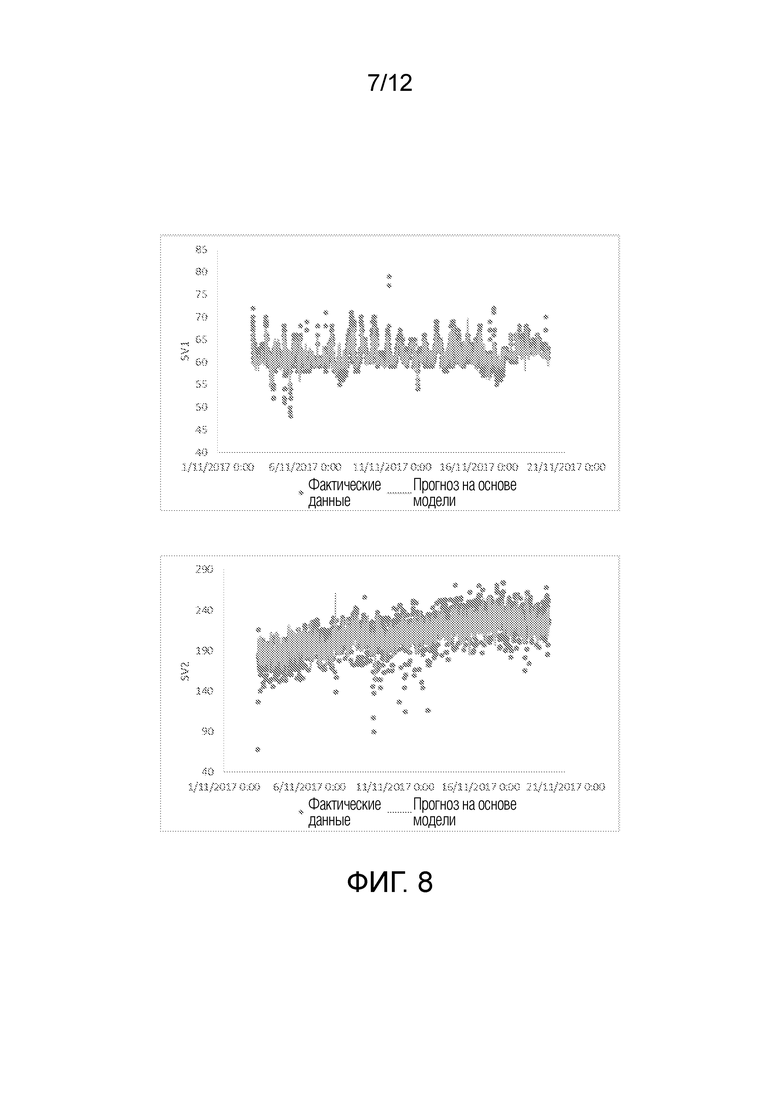
[0052] ФИГ. 8 показывают графические представления сравнений между измеренными данными, собранными первой свободно движущейся мелющей средой (SV1) и второй свободно движущейся мелющей средой (SV2), и прогнозируемой моделью процесса.
[0053] ФИГ. 9 показывают графические представления более анализов тенденций среди переменных процесса PV1, PV2 и измеренных данных, собранных первой и второй свободно движущимися средами (SV1, SV2).
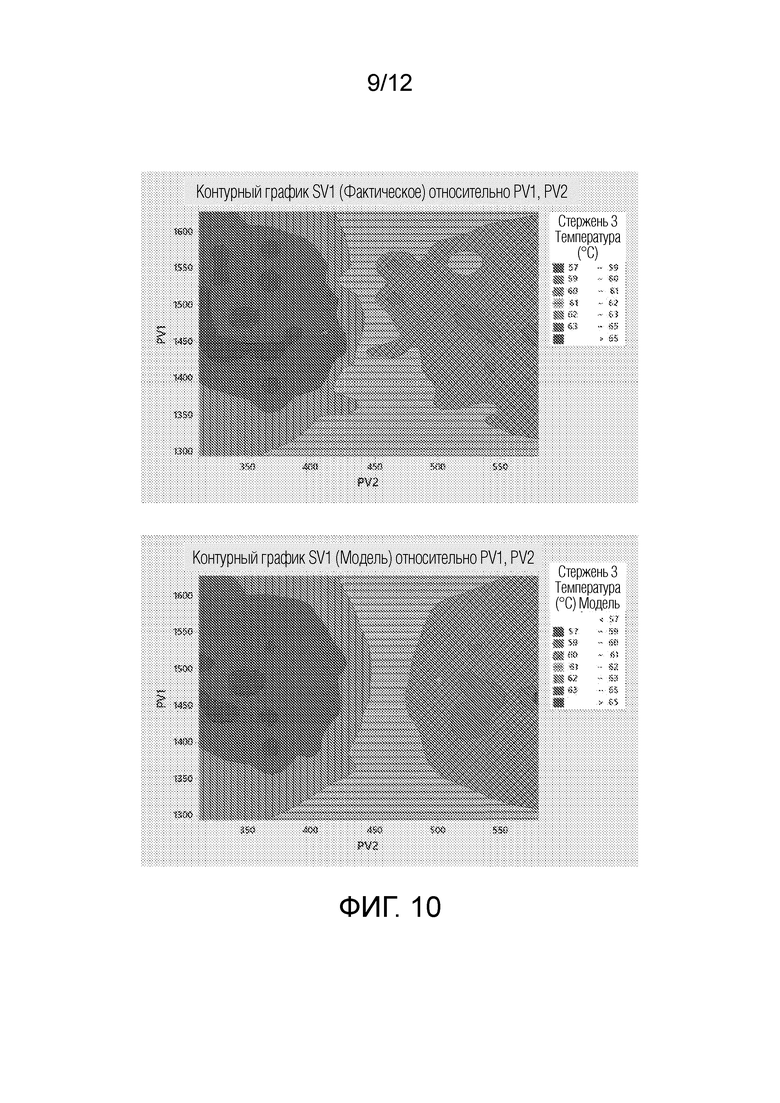
[0054] ФИГ. 10 показывает контурные графики данных процесса и прогноза на основе модели для переменных процесса PV1, PV2 в отношении данных датчика SV1.
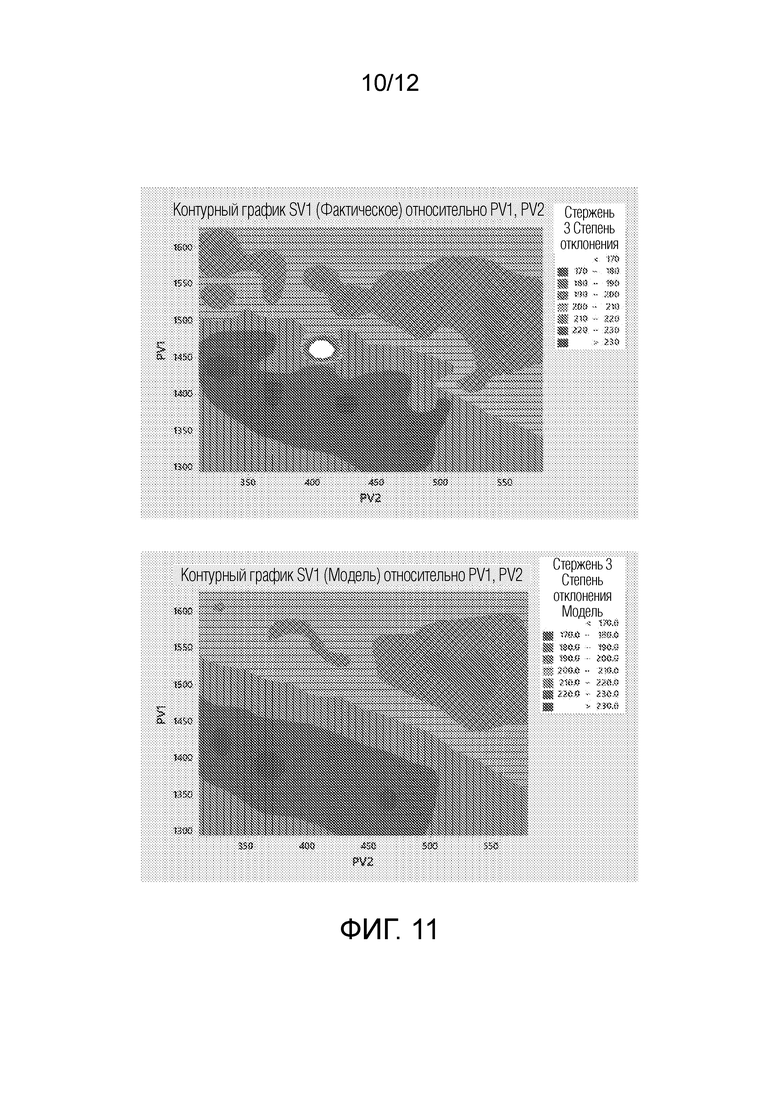
[0055] ФИГ. 11 показывает контурные графики данных процесса и прогноза на основе модели для переменных процесса PV1, PV2 в отношении данных датчика SV2.
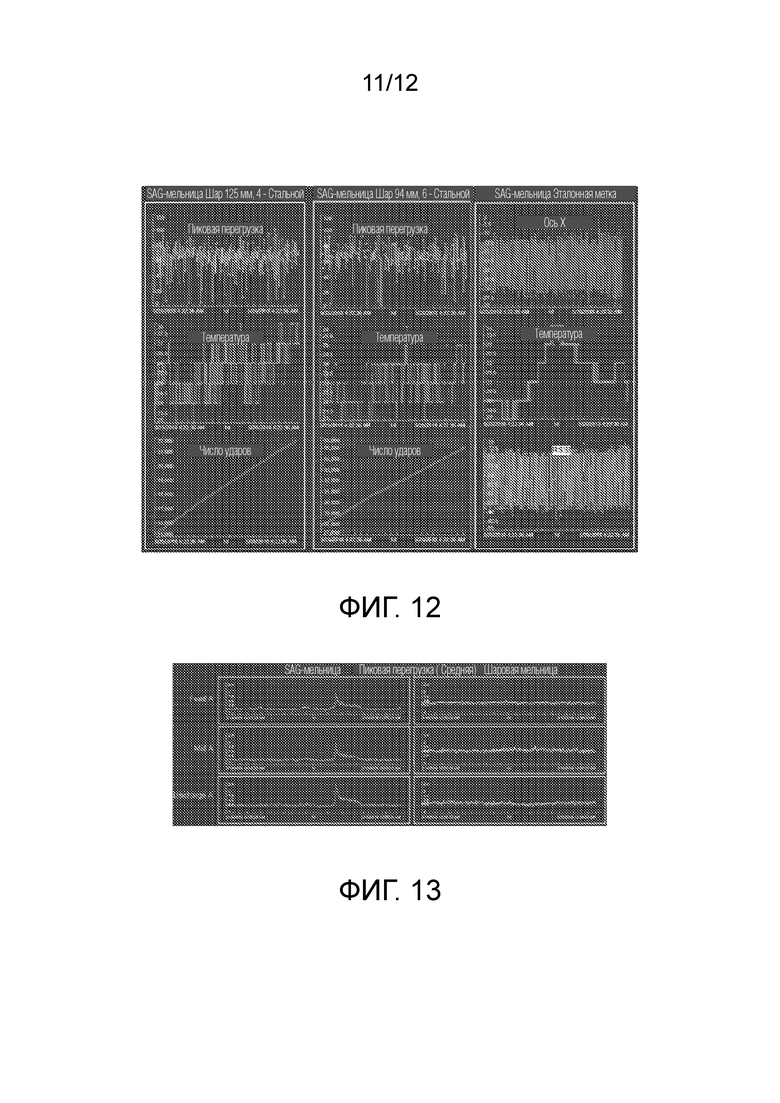
[0056] ФИГ. 12 показывает графическое представление пиковой перегрузки, температуры и числа ударов, измеренных свободно движущимися мелющими средами двух разных диаметров в SAG-мельнице, в соответствии с одним вариантом осуществления, описанном в изобретении.
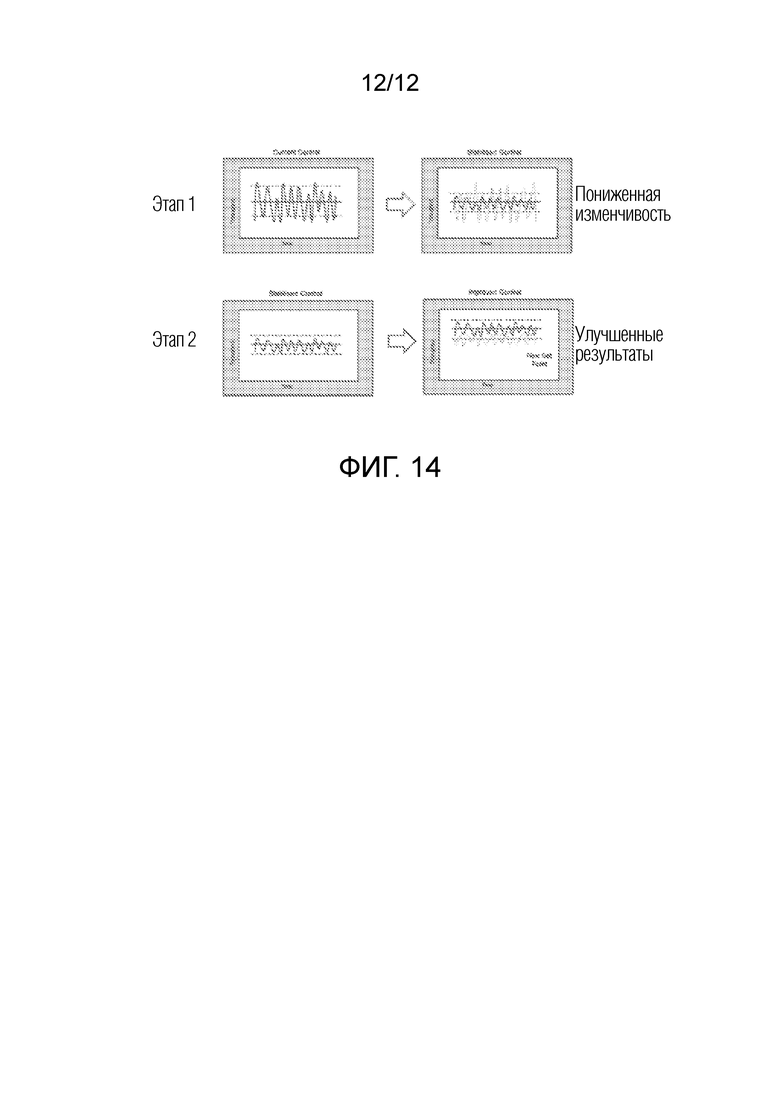
[0057] ФИГ. 13 показывает графическое представление пиковой перегрузки, измеренного в режиме реального времени в SAG-мельнице и шаровой мельнице.
[0058] ФИГ. 14 представляет собой блок-схему, показывающую другой вариант осуществления способа оптимизации, в котором используют варианты осуществления свободно движущейся мелющей среды, описанной в изобретении.
Описание вариантов осуществления изобретения
Общие понятия
[0059] Во всем данном описании, если конкретно не указано иное или контекст не требует иного, ссылка на одну стадию, состав, группу стадий или группу составов должна охватывать одну и множество (то есть, одну или более таких стадий, составов, групп стадий или групп составов. Таким образом, как используется в данном документе, формы единственного числа включают аспекты множественного числа, если в контексте явно не указано иное. Например, ссылка на включает один, а также два или более и т.д.
[0060] Термин «и/или», например, «X и/или Y», как следует понимать, означает или «X и Y» или «X или Y» и должен рассматриваться, как обеспечивающий поддержку обоих значений или любого значения.
[0061] В данном описании слово «содержит» или такие варианты, как «включает» или «включающий», следует понимать, как подразумевающие включение указанного элемента, целого числа или стадии, или группы элементов, целых чисел или стадий, но не исключающие любой другой элемент, целое число или стадию, или группу элементов, целых чисел или стадий.
[0062] Если не определено иное, все технические и научные термины, используемые в настоящем документе, имеют то же значение, которое обычно понимается специалистом в области техники, к которой относится содержание настоящего изобретения. Хотя способы и материалы, аналогичные или эквивалентные описанным здесь, могут быть использованы на практике или при тестировании настоящего изобретения, подходящие способы и материалы описаны ниже. В случае противоречия преимущественную силу имеет настоящее описание, включая определения. Кроме того, материалы и примеры являются только иллюстративными и не предназначены для ограничения изобретения.
Свободно движущиеся мелющие тела
[0063] Настоящее изобретение описывает свободно движущуюся мелющую среду для измерения одной или более физических характеристик измельчающего устройства во время работы или находящейся в нем загрузки. В частности, настоящее изобретение описывает свободно движущуюся мелющую среду, приспособленную для измерения, сбора и передачи данных, соответствующих одной или более физическим характеристикам измельчающего устройства или находящейся в нем загрузки, во время процесса измельчения.
[0064] Термин «измельчение», используемый в данном случае, относится к процессу уменьшения размера частиц сухих материалов или суспензий с помощью трех типов сил: сжатие, удар и истирание. Два основных процесса измельчения представляют собой (1) дробление, где задействованы силы сжатия и удара, чтобы уменьшить размер частиц, и (2) размалывание, где удар и истирание являются преобладающими силами, действующими на частицы.
[0065] «Измельчающее устройство» относится к оборудованию, предназначенному для операций дробления или размалывания. Типичное измельчающее устройство для дробления включает, но без ограничения, щековые дробилки, гирационные дробилки, конусные дробилки, валковые дробилки и дробилки ударного типа. Типичное измельчающее устройство для размалывания включает, но без ограничения, стержневые мельницы, шаровые мельницы, мельницы полусамоизмельчения (SAG), расположенные в замкнутом контуре с классификатором.
[0066] «Контур измельчения» относится к одному или более измельчающим устройствам в последовательной комбинации вместе со вспомогательным технологическим оборудованием, таким как бункеры, конвейеры, загрузочные желоба, разгрузочные желоба, классификаторы, такие как классификатор-просеиватель или циклонный классификатор, генераторы мощности, устройства управления процессом, генераторы переменных процесса, такие как датчики уровня и датчики плотности или датчики давления, для управления потоком материала через контур измельчения и его работой, и т.д. Специалисту в данной области техники будет понятно, что компоненты в контуре измельчения и их конфигурация будут меняться в зависимости от мощности установки, характеристик руды (например, от прочности, измельчаемости, абразивности) и размера продукта.
[0067] Различные варианты осуществления свободно движущейся мелющей среды проиллюстрированы с дополнительными деталями со ссылкой на ФИГ. 1 и 2, где подобные части везде обозначены одинаковыми номерами.
[0068] Свободно движущаяся мелющая среда 10, пригодная для использования в стержневой мельнице, показана на ФИГ. 1. Свободно движущаяся мелющая среда 10 включает традиционный мелющий стержень 12, как правило, используемый в стержневой мельнице. Мелющий стержень 12 может представлять собой стержень из легированной стали любой длины и любого диаметра. Во многих вариантах осуществления мелющий стержень 12 может иметь длину в интервале от 3,6 до 6,05 м и диаметр в интервале 75-100 мм. Например, в стержневых мельницах обычно используют мелющие стержни диаметром 75 мм, 90 мм или 100 мм.
[0069] Каждый противоположный конец 14 мелющего стержня 12 снабжен коаксиально выровненным отверстием 16. Отверстия 16 могут быть механически выработаны в противоположных концах 14 стержня 12 или другим образом сформированы в них до глубины не больше чем 100 мм и диаметром не больше чем 40 мм. В предпочтительном варианте осуществления отверстие 16 высверливают в каждом противоположном конце 14 стержня 12 до глубины 80 мм с диаметром 32 мм.
[0070] Альтернативная свободно движущаяся мелющая среда 10’, приемлемая для использования в шаровой мельнице или SAG-мельнице, показана на ФИГ. 2. Свободно движущаяся мелющая среда 10’ включает традиционный мелющий шар 12’, как правило, используемый в шаровой мельнице или SAG-мельнице. Мелющий шар 12’ может представлять собой шар из легированной стали или другого железоуглеродистого сплава любого диаметра. Во многих вариантах осуществления мелющий шар 12’ может иметь диаметр в интервале 75-150 мм, хотя специалисту в данной области техники будет понятно, что мелющие шары, имеющие меньшие или большие диаметры, могут быть приспособлены аналогичным образом, как описано в данном документе.
[0071] Отверстие 16 может быть механически выработано или может быть другим образом получено на окружной поверхности 18 мелющего шара 12’ в радиальном совмещении с центром мелющего шара 12’ до общей глубины не больше чем 100 мм и диаметром не больше чем 40 мм.
[0072] Следует понимать, что глубина отверстия 16 в мелющем шаре 12’ может меняться в зависимости от диаметра мелющего шара 12’. Например, в одном варианте осуществления, где шар 12’ имеет диаметр 250 мм, глубина отверстия 16 равна 85 мм. В альтернативном варианте осуществления, где шар 12’ имеет диаметр 188 мм, глубина отверстия 16 равна 65 мм.
[0073] Свободно движущаяся мелющая среда 12, 12’ включает корпус датчика 20, выполненный с возможностью входить в отверстие 16. Корпус датчика 20 включает жесткую втулку 22, упругий сердечник 24 и группу датчиков 26, встроенную в упругий сердечник 24. Группа датчиков 26 также может быть снабжена упругим кожухом 28.
[0074] Группа датчиков 26 может быть расположена вблизи основания 30 корпуса датчика 20, так что при использовании группа датчиков 26 защищена от столкновения с загрузкой и другим мелющим телом 12, 12’ и не подвергается износу во время срока службы мелющего тела 12, 12’. Группа датчиков 26 может быть снабжена антенной 31, проходящей от группы датчиков 26 через упругий сердечник 24 до верхней поверхности 34 корпуса датчика 20.
[0075] В некоторых вариантах осуществления жесткая втулка 22 выполнена так, чтобы дать возможность корпусу датчика 20 входить в отверстие 16 с фрикционной посадкой. Жесткая втулка 22 может быть выполнена из любого подходящего жесткого полимерного материала, такого как полиэтилентерефталат (PET), полиэтилен высокой плотности (HDPE), полипропилен (PP), поликарбонаты (PC) или поливинилхлорид (PVC). Жесткая втулка 22 также придает мелющему стержню 12 или мелющему шару 12’ большую стойкость относительно растрескивания или разрушения.
[0076] Упругий сердечник 24 может содержать первый упругий материал, и упругий кожух 28 может содержать второй упругий материал. Первый и второй упругие материалы могут быть одинаковыми или разными. Первый и второй материалы могут быть способны распределять силы, приложенные к корпусу датчика 20, к указанному мелющему телу 12, 12’, тем самым рассеивая по меньшей мере некоторые из указанных сил от группы датчиков 26.
[0077] Первый и второй упругие материалы могут представлять собой термопластичные эластомеры (ТПЭ (TPE)) или термореактивные эластомеры (ТРЭ (TSE)). Подходящие примеры ТПЭ включают, но без ограничения, стирольные блок-сополимеры (TPS), термопластичные полиолефиновые эластомеры (TPO), термопластичные вулканизаты (TPV), термопластичные полиуретаны (TPU), термопластичные сложные со-полиэфиры (TPC) или термопластичные полиамиды (TPA). Подходящие примеры ТРЭ включают, но без ограничения, поли(сложно)эфирную смолу, полиуретаны, вулканизированный каучук, полиамиды и бисмалеимиды, силиконовые смолы, силиконовый каучук.
[0078] Группа датчиков 26 выполнена с возможностью измерения одной или более физических характеристик измельчающего устройства во время работы или находящейся в нем загрузки.
[0079] Группа датчиков 26 может включать один или более датчиков, расположенных соответственно с возможностью измерения одной или более физических характеристик загрузки, находящейся внутри измельчающего устройства, таких как температура, удар, частота удара, скорость удара, сила удара, смещение, траектория, объем загрузки, носок и плечо загрузки и т.д.
[0080] Альтернативно или дополнительно группа датчиков 26 может содержать один или более датчиков, расположенных соответственно с возможностью измерения одной или более физических характеристик измельчающего устройства, таких как угол подъемника, износ подъемника, температура, отклонение или скрещивание стержней, скорость вращения мельницы, энергоэффективность, амплитуда и/или частота колебаний, динамическая нагрузка на футеровочный болт, крутящий момент/натяжение футеровочного болта и т.д.
[0081] Например, группа датчиков 26 может включать преобразователь, способный генерировать электрический выходной сигнал, такой как напряжение, которое меняется в соответствии с силой удара, приложенной к корпусу, в который встроена группа датчиков 26. Группа датчиков 26 может содержать группу преобразователей, где объединяются сигналы, сгенерированные преобразователями. Следует иметь ввиду, что группа датчиков 26 может включать другие пьезоэлектрические датчики, способные генерировать электрический выходной сигнал, такой как напряжение, которое меняется в зависимости от силы сжатия, растяжения и/или кручения, положенной к корпусу, в который встроена группа датчиков 26.
[0082] Группа датчиков 26 может содержать акселерометр, такой как акселерометр высокой перегрузки, способный генерировать электрический выходной сигнал, такой как напряжение, которое меняется в ответ на движение корпуса, в который встроена группа датчиков 26. В частности, акселерометр может представлять собой трехосевые гироскопы на основе микроэлектромеханической системы (MEM), необязательно включающий магнетометр для получения абсолютных угловых измерений относительно магнитного поля земли. В результате могут быть собраны данные о траектории и местоположении сенсорного устройства 10 внутри измельчающего устройства.
[0083] Группа датчиков 26 может включать акустический датчик, способный генерировать электрический выходной сигнал, такой как напряжение, в ответ на частоту ударов корпуса, в который встроена группа датчиков 26.
[0084] Группа датчиков 26 может включать термопару, способную генерировать электрический выходной сигнал, такой как напряжение, которое меняется в зависимости от температуры корпуса и/или окружающей среды, в которой корпус расположен.
[0085] Группа датчиков 26 может дополнительно включать усилитель (не показан), который усиливает электрические сигналы, сгенерированные одним или более датчиками.
[0086] Один или более датчиков могут измерять указанные одну или более физических характеристик постоянно или с перерывами при заданной частоте выборки. Группа датчиков 26 может включать запоминающее устройство (не показано), где могут быть сохранены данные, соответствующие указанным измерениям. Один или более датчиков могут быть дополнительно снабжены портом связи для передачи собранных данных от указанного запоминающего устройства на внешнее устройство. Например, порт связи может принимать форму последовательного порта связи, порта USB связи или порта беспроводной связи. Порт беспроводной связи может представлять собой порт беспроводной радиочастотной (RF) связи, содержащий передатчик и антенну 31. Антенна 31 может быть выполнена с возможностью приема RF-сигнала от 920 до 868 МГц.
[0087] Передатчик может быть выполнен с возможностью передавать данные непосредственно от одного или более датчиков в группе датчиков 26 в режиме реального времени или от запоминающего устройства к процессору процессорного модуля, который будет описан более подробно ниже.
[0088] В другом альтернативном варианте осуществления свободно движущееся мелющее тело может включать образец загрузки, такой как репрезентативный образец руды, которую измельчают в шаровой мельнице или SAG-мельнице. Следует понимать, что репрезентативный образец руды может иметь диаметр в интервале 75-150 мм или быть достаточного размера, чтобы отверстие 16 могло быть просверлено в указанном образце без его разрушения. Аналогично образец руды должен иметь подходящую минералогию (например, морфологию, твердость, кливаж и т.д.), чтобы указанный образец был достаточно прочным в мельнице в течение заданного периода времени, чтобы корпус датчика 20 удерживался в нем для измерения и сбора желаемого числа точек данных.
[0089] На ФИГ. 3 представлен альтернативный вариант осуществления сенсорного устройства 10”, где подобные части везде обозначены одинаковыми номерами. Сенсорное устройство 10” может быть приемлемо для применения в стержневой мельнице, шаровой мельнице и SAG-мельнице, в которых используют протекторные износостойкие футеровки. Сенсорное устройство 10” включает обычный футеровочный болт 32, который, как правило, используют для прикрепления протекторной износостойкой футеровки 34 к износной пластине или мельничной оболочке 36 соответствующего измельчающего устройства.
[0090] В этом конкретном варианте осуществления футеровочный болт 32 включает головку 38, выступающую из резьбового хвостика 40. При использовании головка 38 и часть 40a резьбового хвостика 40, из которого она выступает, расположены в отверстии износостойкой футеровки 34 и износной пластины 36. Свободная часть 40b резьбового хвостика 40, которая удалена от головки 38, выступает наружу из мельничной оболочки 36, как показано на ФИГ. 3. Сенсорное устройство 10” необязательно может быть снабжено уплотнительной шайбой 41a, которую заглубляют для соответствия футеровочному болту 32 и стопорной гайке 41b, как показано на ФИГ. 3.
[0091] Сенсорное устройство 10” также включает монтажную пластину 42, которая может быть соединена резьбовым соединением со свободной частью 40b резьбового хвостика 40 посредством a стопорной гайки и винтовой пружинной шайбы 44. Группа датчиков 26, описанная выше, может быть установлена на монтажной пластине 42. Предполагается, что группа датчиков 26 может быть расположена в подходящем кожухе 46 для защиты группы датчиков 26 от повреждения и смещения от материала, внешнего к мельничной оболочке 36.
[0092] Сенсорное устройство 10” может работать независимо от свободно движущейся мелющей среды 10, 10’ внутри измельчающего устройства и измерять одну или более физических характеристик, относящихся к его работе. Например, в варианте осуществления, в котором группа датчиков 26 содержит акселерометр, в частности акселерометр высокой перегрузки, группа датчиков 26, связанная с сенсорным устройством 10”, может измерять и собирать данные, связанные с ударными силами, испытываемыми мельничной оболочкой 36, профилем колебаний от подачи до разгрузочного конца и скоростью и углом поворота мельницы.
[0093] Альтернативно или дополнительно данные, собранные и сохраненные группой датчиков 26 сенсорного устройства 10”, могут быть использованы в сочетании с данными, собранными свободно движущейся мелющей средой 10, 10’ внутри измельчающего устройства, для целей перекрестных ссылок на одну или более физических характеристик, таких как время выборки и положение внутри измельчающего устройства.
Система и способ оптимизации производительности контура измельчения
[0094] Настоящее изобретение также относится к системе и способу оптимизации производительности контура измельчения, содержащего измельчающее устройство, в ответ на одну или более физических характеристик измельчающего устройства или находящейся в нем загрузки, измеренных во время работы измельчающего устройства.
[0095] Обращаясь к ФИГ. 4, система 100 может быть выполнена с возможностью предоставлять информацию в режиме реального времени или близко к реальному времени системе управления рудником 110 через оператора процесса и/или металлурга 160 для управления контуром измельчения и оптимизации одного или более параметров процесса контура измельчения в соответствии с моделью процесса 120. Система управления рудником 110 может включать любую подходящую компьютеризированную систему управления процессом измельчения или контуром измельчения, включающую большое число замкнутых регулирующих схем, в которых автономные контроллеры распределены по всей системе управления рудником 110 во взаимодействии с центральным оперативно-диспетчерским контроллером, таким как распределенная система управления (РСУ (DCS)), и/или программируемый логический контроллер (ПЛК (PLC)), и/или диспетчерское управление и сбор данных (SCADA).
[0096] Модель процесса 120 включает формат временных рядов для определения условий, которые приводят к оптимальной производительности измельчающего устройства. Как правило, модель процесса 120 может включать комплексный подход, учитывающий множество параметров процесса, перечисленных ниже, хотя следует иметь ввиду, что приведенный ниже перечень может не быть исчерпывающим и может включать дополнительные параметры процесса. Следует иметь ввиду, что модель процесса 120 может меняться для разных участков.
[0097] Один или более параметров процесса модели процесса 120 могут быть выбраны из группы, включающей температуру измельчающего устройства или загрузки, силу удара, частоту удара, смещение, отклонение, скорость подачи руды/материала, расход воды, скорость вращения мельницы, энергоэффективность, траекторию, заполняемость мельницы, мониторинг носка загрузки, угол подъемника, степень износа на подъемнике, потребление мелющих сред, распределение частиц по размерам, рециркулирующую нагрузку, pH, плотность суспензии, удельную плотность, давление и/или температуру подшипника, скорость выгрузки, измерение крутящего момента/натяжения болта, динамическую нагрузку на болт, отображение положения болтов, измерение износа галечных порта и решетки.
[0098] Некоторые параметры процесса, такие как температура измельчающего устройства или загрузки, сила удара, частота удара, смещения и отклонение загрузки, могут быть измерены с помощью свободно движущейся мелющей среды 10, 10’ или сенсорного устройства 10”. Другие параметры процесса, такие как скорость подачи руды/материала, расход воды, рециркулирующая нагрузка, pH, плотность суспензии, удельная плотность, давление и/или температура подшипника, скорость разгрузки, могут быть получены от РСУ/ПЛК (DCS/PLC). Некоторые параметры процесса, такие как энергоэффективность, траектория, заполняемость мельницы, мониторинг носка загрузки, угол подъемника, степень износа на подъемнике, потребление мелющих тел, могут быть рассчитаны с использованием исторических технологических данных установки.
[0099] Система 100 также может включать первый процессорный модуль 130, который в этом варианте осуществления содержит вычислительный модуль, который может быть автономным (например, сервер), или может представлять собой модуль, такой как удаленный терминальный блок (RTU) внутри более крупной многофункциональной вычислительной системы. Сервер или вычислительный модуль могут быть расположены локально относительно контура измельчения или подключены удаленно к контуру измельчения через телекоммуникационное соединение.
[0100] Первый процессорный модуль 130 может включать подходящие компоненты, необходимые для приема, хранения и исполнения соответствующих машинных команд. Первый процессорный модуль 130 может включать блок обработки, постоянное запоминающее устройство (ПЗУ (ROM)), оперативное запоминающее устройство (ОЗУ (RAM)) и устройства ввода-вывода по каналу связи, такие как дисководы, устройства ввода данных, такие как Ethernet-порт, USB-порт и т.д., дисплей, такой жидкокристаллический дисплей, светоизлучающий дисплей или любой другой подходящий дисплей, включая сенсорный интерактивный дисплей, и линии связи.
[0101] Первый процессорный модуль 130 может включать команды, которые могут находиться в ПЗУ, ОЗУ или на дисководах и могут быть исполнены блоком обработки. Также существует множество линий связи, которые могут соединять одно или более вычислительных устройств, таких как сервер, персональные компьютеры, терминалы, беспроводные или портативные вычислительные устройства и/или частные управляющие интерфейсы. По меньшей мере, одна из множества линий связи может быть соединена с внешней вычислительной сетью через телефонную линию или другой тип линии связи.
[0102] Первый процессорный модуль 130 может дополнительно включать запоминающие устройства, такие как дисковод, который может охватывать твердотельные накопители, накопители на жестком диске, накопители на оптическом диске или накопители на магнитной ленте. Первый процессорный модуль 130 может использовать один дисковый накопитель или множество дисковых накопителей.
[0103] В некоторых вариантах осуществления первый процессорный модуль 130 необязательно может находиться во взаимодействии с облачной вычислительной системой 140 для хранения и обработки данных, принятых от одной или более групп датчиков 26.
[0104] Первый процессорный модуль 130 также может иметь подходящую операционную систему, которая находится на дисководе или в ПЗУ сервера или вычислительного модуля.
[0105] В этом варианте осуществления первый процессорный модуль 130 снабжен приемником, предназначенным для приема данных от свободно движущейся мелющей среды 10, 10’ или сенсорного устройства 10”, относящихся к одной или более физическим характеристикам, в режиме реального времени для проведения анализа в режиме реального времени рабочих характеристик измельчающего устройства в контуре измельчения. Предустановленная программа может быть использована процессорным модулем для преобразования принятых данных в переменные датчика SV1, SV2, …SVn (например, температуру, силу удара и/или частоту удара, смещение, траекторию, угол подъемника и т.д.) и создания графических представлений таких переменных датчика SV1, SV2, …SVn. Например, ФИГ. 5 и 6 показывают соответствующие графические представления переменных датчика для силы удара и температуры, соответственно, полученных из данных, принятых от соответствующей свободно движущейся среды 10’.
[0106] В одном варианте осуществления переменные датчика SV1, SV2, …SVn могут быть направлены в систему управления рудником 110 в режиме реального времени при отсутствии какой-либо информации по оптимизации, чтобы обеспечить мониторинг производительности измельчающего устройства. Переменные датчика SV1, SV2, ...SVn могут быть сравнены с одним или более параметрами процесса PV1, PV2, …PVn, особенно путем графического представления, чтобы идентифицировать одно или более взаимодействий в реальном времени между технологическими переменными контура измельчения и переменными датчика. ФИГ. 7 показывает пример мониторинга данных в режиме реального времени, отображенный в интерфейсе «человек-машина» (HMI), где параметры процесса PV1, PV2 и PV3 представлены графически с переменными датчика SV1 и SV2. Визуализация таких данных позволяет получать представление об отклике условий внутри измельчающего устройства на любое изменение в одном или нескольких более широких технологических условий в контуре измельчения.
[0107] В другом варианте осуществления, показанном на ФИГ. 4, система 100 также может включать систему оптимизации 150 для приема и обработки анализа в режиме реального времени, созданного первым процессорным модулем 130, полученного на основе переменных датчика SV, переменных процесса PV и относительно основных контрольных переменных CV в режиме реального времени или близко к реальному времени для оператора/металлурга 160 и для обновления модели процесса 120. Система оптимизации 150 выполнена во взаимодействии с системой управления рудником 110, моделью процесса 120 и первым процессорным модулем 130. Система оптимизации 150 получает переменные датчиков SV1, SV2, …SVn от первого процессорного модуля 130 и другие данные процесса от системы управления рудником 110 и проводит анализ в режиме реального времени работы измельчающего устройства в контуре измельчения. В одном варианте осуществления система оптимизации 150 может генерировать обновленную модель процесса 120’ в соответствии с анализом в режиме реального времени, посредством чего один или более параметров процесса могут быть изменены для улучшения производительности контура измельчения в режиме реального времени или близко к реальному времени. В частности, система оптимизации 150 может генерировать набор оптимизированных параметров процесса для оптимизации работы контура измельчения.
[0108] Необходимо отметить, что при генерировании обновленной модели процесса 120’ системой оптимизации 150 могут быть использованы один или более алгоритмов, которые реализуют математическое и статистическое моделирование на основе собранных данных из данных, относящихся к предшествующей работе измельчающего устройства. Такое математическое моделирование включает подходящие методики интерполяции или другие математические методы, такие как нелинейная многопараметрическая регрессия, или модель временных рядов с авторегрессионным интегрированным скользящим средним (ARIMA), или нейросетевое моделирование.
[0109] Например, могут быть разработаны статистические модели процесса при применении одного или более параметров процесса PV1, PV2, …PVn, используемых в контуре измельчения, и переменных датчика SV1, SV2, …SVn, измеренных с помощью свободно движущейся мелющей среды 10, 10’ или сенсорного устройства 10”, которые могут быть применены для оптимизации процесса измельчения и разработки одной или более установок контрольных переменных (CV) в системе управления рудником 110. Следует иметь ввиду, что характеристики модели будут варьироваться в зависимости от конкретного контура измельчения любого конкретного участка. Предпочтительно, чтобы модель факторизовалась в большинстве аспектов, если не во всех, процесса измельчения, прописанного на конкретном участке. ФИГ. 8 показывает точность модели процесса 120’ для прогнозирования переменных датчика SV1 и SV2, соответствующих параметрам процесса PV1, PV2, PV3, как показано на ФИГ. 8.
[0110] Анализ тенденций, связанных с параметрами процесса PV и переменными датчика SV, также может быть рассчитан, как показано на ФИГ. 9, для получения развернутой картины внутренней динамики измельчающего устройства и ее взаимосвязи с ответом свободно движущейся мелющей среды 10, 10’ и сенсорного устройства 10” по месту.
[0111] Контурные графики параметров процесса и модельные прогнозы представляют собой форму разработки алгоритмов оптимизации процесса измельчения. Как показано на ФИГ. 10 и 11, 2D-контурные графики могут дать четкое представление оптимизированного значения для технологических параметров процесса измельчения. Например, для самого низкого значения SV1 и SV2 соответствующий параметр процесса PV1 и PV2 может быть определен путем применения статистической обновленной модели процесса 120’, как описано выше.
[0112] В альтернативных вариантах осуществления переменные датчика SV1, SV2, …SVn от первого процессорного модуля 130 могут быть преобразованы в анализ в режиме реального времени работы измельчающего устройства в облачной вычислительной системе 140. Анализ в режиме реального времени, созданный таким образом, может находиться в форме отчета, набора данных или другого читаемого формата и может быть направлен оператору и рассмотрен оператором 160, например, металлургом или оператором установки, вместе с моделью процесса 120. На основании анализа в режиме реального времени оператор 160 может вручную изменить один или более параметров процесса для улучшения производительности контура измельчения, тем самым обновляя модель процесса 120 для создания обновленной модели процесса 120’.
[0113] Один или более параметров процесса, которые могут быть изменены с целью улучшения рабочих характеристик контура измельчения в ответ на анализ в режиме реального времени работы измельчающего устройства, могут быть выбраны из группы, включающей температуру измельчающего устройства или загрузки, силу удара, частоту удара, смещения, отклонение, скорость подачи руды/материала, расход воды, скорость вращения мельницы, энергоэффективность, траекторию, заполняемость мельницы, мониторинг носка загрузки, угол подъемника, степень износа на подъемнике, потребление мелющей среды; распределение частиц по размерам, рециркулирующую нагрузку, pH, плотность суспензии, давление и/или температуру подшипника, скорость разгрузки, измерение крутящего момента/натяжения болта, динамическую нагрузку на болт, отображение положения болтов. В частности, параметры процесса, такие как скорость подачи твердых веществ, расход воды, заполняемость мельницы, мощность, скорость вращения мельницы, плотность суспензии, скорость разгрузки, представляют собой параметры, которые могут быть изменены для улучшения рабочих характеристик контура измельчения.
[0114] Преимуществом описанных вариантов осуществления изобретения является то, что предложены способ и система, которые облегчают обновление модели процесса измельчения в реальном времени для содействия оптимизации производительности контура измельчения. Следовательно, вероятность переизмельчения снижается. Это приводит к увеличению степени извлечения материала с целевым размером продукта и пропускной способности с тем результатом, что улучшаются экономические показатели, связанные с энергоэффективностью.
[0115] Специалистам в данной области техники будет понятно, что в описанные выше варианты осуществления могут быть внесены многочисленные изменения и/или модификации, не выходящие за рамки общего объема настоящего изобретения. Таким образом, настоящие варианты осуществления следует рассматривать во всех отношениях как иллюстративные, а не как ограничительные.
[0116] Например, хотя и не требуется, варианты осуществления, описанные со ссылкой на ФИГ. 4-11, могут быть реализованы в виде программного интерфейса прикладных задач (API) или в виде серии библиотек для использования разработчиком или могут быть включены в другое программное приложение, такое как операционная система терминала или персонального компьютера, или оперативная система портативного вычислительного устройства. Как правило, поскольку программные модули включают стандартные программы, функции, объекты, компоненты и файлы данных, квалифицированному специалисту будет понятно, что функциональные возможности программного приложения могут быть распределены по ряду стандартных программ, функций, объектов, компонентов или файлов данных для достижения такой же функциональности.
[0117] Также следует понимать, что, если способы и системы по настоящему изобретению были реализованы вычислительной системой или частично были реализованы вычислительными системами, то можно использовать любую подходящую архитектуру вычислительной системы. Сюда относятся автономные компьютеры, сетевые компьютеры и/или специализированные вычислительные устройства, которые могут выполнять множество функций, причем некоторые функции не связаны с описанным изобретением. Например, контур измельчения может включать компьютеризированные функции, такие как обработка ошибок, управление движением или системы связи, которые интегрированы или запрограммированы для работы с методологиями измельчения, описанными в изобретении, в качестве полного пакета программного обеспечения. Когда используют термины «компьютер», «вычислительная система» и/или «вычислительное устройство», то подразумевается, что эти термины охватывают любое подходящее расположение компьютерного оборудования для осуществления описанных выше функциональных возможностей или программного обеспечения.
Примеры
[0118] Следующие примеры следует рассматривать только как иллюстративные. Поэтому они никоим образом не должны толковаться как ограничивающие изобретение.
[0119] Десять (10) свободно движущихся мелющих сред 10’ в форме мелющих шаров 12’, имеющих диаметр 94 мм и 125 мм, соответственно, загружают в работающую SAG-мельницу. Данные, относящиеся к трем (3) физическим параметрам: (1) пиковая перегрузка, (2) температура и (3) число ударов, собирают от соответствующих групп датчиков 26 каждого мелющего шара с разными размерами 12’ и представляют в виде графика на ФИГ. 12. Несмотря на разницу в диаметре, собранные данные не указывают на разницу между путями прохождения двух мелющих шаров 12’ в загрузке, причем 94 мм мелющий шар 12’ испытывает аналогичные ударные воздействия перегрузки, что и более крупный 125 мм мелющий шар 12’. Мелющие шары двух размеров 12’ также показывают аналогичное число из 7000 ударов в течение одинакового периода.
[0120] ФИГ. 13 показывают данные пиковой перегрузки, измеренные свободно движущейся мелющей средой 10’ в SAG-мельнице и шаровой мельнице. Сходство сигналов от указанных мелющих сред 10’ внутри каждой мельницы указывают на устойчивый и надежный вывод данных от указанных мелющих сред 10’ с периодом нестабильности в SAG-мельнице, четко отображаемым измеренными данными.
[0121] Можно предсказать движение загрузки в мельнице с использованием моделирования на основе метода дискретного элемента (DEM). DEM моделирует движение и взаимодействия большого числа отдельных частиц и движущихся стенок под действием гравитации с использованием математических алгоритмов и законов механики Ньютона. Хотя модели DEM полезны, также следует помнить о значительных ограничениях метода. В качестве конкретного примера модель DEM представляет собой анализ в момент времени. То есть, она дает представление о межчастичном поведении на момент сбора соответствующих данных. Модель также требует для проведения анализа принятия допущения критических переменных. Типичный анализ занимает много времени. Учитывая динамику системы элементов в барабанной мельнице, нельзя сказать, что исследование является типичным или повторяемым в другой момент времени. Чтобы это было так, необходимо выполнить многократное моделирование при лонгитюдном исследовании.
[0122] При использовании результатов исследования на момент времени, таких как описанные здесь результаты, модели DEM и данные в режиме реального времени позволяют проводить триангуляцию результатов. Триангуляция представляет собой эффективный метод, который облегчает проверку достоверности данных путем перекрестной проверки от двух или более источников. Соответственно, триангуляция моделей DEM и данных в режиме реального времени, измеренных с помощью мелющих сред 10, 10’, как описано в изобретении, может быть использована для улучшения оптимизации работы мельницы.
[0123] На этапе 1 этой модели оптимизации, как показано на ФИГ. 14, базовый вариант рабочих характеристик устанавливают по ранее существующим данным SCADA. Затем осуществляют исследование на момент времени, чтобы убедиться, что размер шара, загрузка шаров и другие критические параметры мельницы оптимизированы (этап 2). Затем данные в режиме реального времени из сенсорной системы отслеживают события в мельнице и помогают обеспечить более частую работу мельницы в пределах смоделированных параметров (этап 3). Таким образом, пропускная способность и эффективность мельницы могут быть улучшены несколько раз (этап 4).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ТОНКОГО ИЗМЕЛЬЧЕНИЯ ЦЕМЕНТНОГО КЛИНКЕРА | 2005 |
|
RU2361675C2 |
| СПОСОБ ИЗМЕЛЬЧЕНИЯ МАТЕРИАЛОВ ВО ВРАЩАЮЩЕМСЯ БАРАБАНЕ ФЕРРОМАГНИТНЫМИ МЕЛЮЩИМИ ТЕЛАМИ | 2013 |
|
RU2536886C1 |
| Мелющее тело | 1982 |
|
SU1178481A1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ ИЗМЕЛЬЧЕНИЯ РУДЫ В БАРАБАННОЙ МЕЛЬНИЦЕ | 2015 |
|
RU2621937C2 |
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ ИЗМЕЛЬЧЕНИЯ | 1998 |
|
RU2149062C1 |
| СПОСОБ МОНИТОРИНГА ПРОЦЕССА ИЗМЕЛЬЧЕНИЯ В БАРАБАННЫХ МЕЛЬНИЦАХ | 2023 |
|
RU2806426C1 |
| СПОСОБ ПОЛУСАМОИЗМЕЛЬЧЕНИЯ ПРЕИМУЩЕСТВЕННО ФЕРРОМАГНИТНОГО СЫРЬЯ | 2012 |
|
RU2521709C2 |
| Способ контроля параметров движения внутримельничной загрузки барабанной мельницы и устройство для его осуществления | 1986 |
|
SU1333412A1 |
| СПОСОБ УПРАВЛЕНИЯ РЕЖИМОМ РАБОТЫ ИЗМЕЛЬЧИТЕЛЬНЫХ СИСТЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2021 |
|
RU2779916C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ ИЗМЕЛЬЧЕНИЯ МАТЕРИАЛА В БАРАБАННОЙ МЕЛЬНИЦЕ | 2022 |
|
RU2797096C1 |

Настоящее изобретение относится к мелющей среде, приспособленной для измерения одной или более физических характеристик измельчающего устройства во время работы и/или загрузки, находящейся в устройстве. Мелющая среда содержит свободно движущееся мелющее тело с отверстием, расположенным на наружной части тела. Корпус датчика выполнен с возможностью быть размещенным в отверстии. Корпус датчика содержит жесткую втулку, упругий сердечник и группу датчиков, встроенную в сердечник из упругого материала. Заявленная группа изобретений направлена на обеспечение энергоэффективных условий для операций помола и оптимизацию размольных операций, а также повышение срока эксплуатации устройства. 4 н. и 24 з.п. ф-лы, 14 ил.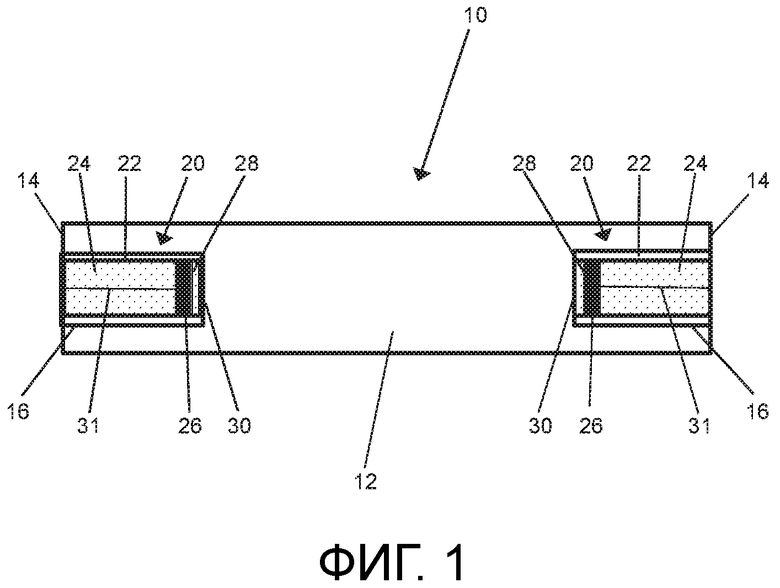
1. Свободно движущаяся мелющая среда, выполненная с возможностью измерения одной или более физических характеристик измельчающего устройства во время работы или находящейся в нем загрузки, причем указанная мелющая среда содержит свободно движущееся мелющее тело с отверстием, расположенным на наружной части указанного тела, и корпус датчика, выполненный с возможностью размещения в отверстии с фрикционной посадкой, при этом корпус датчика содержит жесткую втулку, упругий сердечник и группу датчиков, встроенную в упругий сердечник.
2. Мелющая среда по п. 1, в которой группа датчиков расположена вблизи основания корпуса датчика.
3. Мелющая среда по п. 1 или 2, в которой группа датчиков снабжена антенной, проходящей от группы датчиков через упругий сердечник к верхней поверхности корпуса датчика.
4. Мелющая среда по любому из пп. 1-3, в которой группа датчиков снабжена упругим кожухом.
5. Мелющая среда по п. 4, в которой упругий сердечник может содержать первый упругий материал, а упругий кожух может содержать второй упругий материал.
6. Мелющая среда по п. 5, в которой первый и второй упругие материалы являются одинаковыми или разными.
7. Мелющая среда по любому из пп. 1-6, в которой упругий сердечник способен распределять силы, приложенные к корпусу датчика, к мелющему телу, тем самым рассеивая по меньшей мере некоторые из указанных сил от группы датчиков.
8. Мелющая среда по любому из пп. 1-7, в которой свободно движущееся мелющее тело содержит мелющий стержень, имеющий противоположные концы.
9. Мелющая среда по п. 8, в которой отверстие расположено коаксиально на одном или на каждом противоположном конце мелющего стержня.
10. Мелющая среда по любому из пп. 1-7, в которой свободно движущееся мелющее тело содержит мелющий шар.
11. Мелющая среда по п. 10, в которой отверстие радиально выровнено с центром мелющего шара.
12. Мелющая среда по п. 11, в которой отверстие проходит к центру мелющего шара.
13. Мелющая среда по любому из пп. 1-7, в которой свободно движущееся мелющее тело содержит репрезентативный образец загрузки для измельчающего устройства.
14. Мелющая среда по любому из предыдущих пунктов, в которой группа датчиков содержит один или более датчиков, расположенных соответственно с возможностью измерения одной или более физических характеристик загрузки, находящейся внутри измельчающего устройства, причем одна или более физических характеристик выбрана из группы, включающей температуру, удар, частоту удара, скорость удара, силу удара, смещение, траекторию, объем загрузки, носок и плечо загрузки.
15. Мелющая среда по любому из предыдущих пунктов, в которой группа датчиков содержит один или более датчиков, расположенных соответственно с возможностью измерения одной или более физических характеристик измельчающего устройства, причем одна или более физических характеристик выбрана из группы, включающей угол подъемника, износ подъемника, температуру, отклонение или скрещивание стержней, скорость вращения мельницы, энергоэффективность, амплитуду и/или частоту колебаний, динамическую нагрузку на футеровочный болт, крутящий момент/натяжение футеровочного болта.
16. Система оптимизации производительности контура измельчения, содержащего измельчающее устройство, в ответ на одну или более физических характеристик измельчающего устройства или загрузки, находящейся в нем, измеренных во время работы измельчающего устройства, при этом система содержит:
множество свободно движущихся мелющих сред по любому из пп. 1-15, выполненных с возможностью смешивания при использовании с рудой или другим материалом, нуждающимся в измельчении, и мелющей средой, и загружаемых в измельчающее устройство, в результате чего при использовании множество свободно движущихся мелющих сред собирает данные, соответствующие одной или более физическим характеристикам измельчающего устройства или загрузки, находящейся в нем, во время работы измельчающего устройства;
модуль обработки, выполненный с возможностью приема собранных данных от множества свободно движущихся мелющих сред для проведения анализа в режиме реального времени работы измельчающего устройства в контуре измельчения; и
систему оптимизации, выполненную с возможностью мониторинга и предоставления отчета по одной или более рабочим характеристикам контура измельчения при работе контура измельчения в соответствии с моделью процесса, при этом система оптимизации также выполнена с возможностью изменения одного или более параметров процесса в соответствии с анализом в режиме реального времени, предоставляемым модулем обработки, для улучшения производительности контура измельчения и обновления тем самым модели процесса.
17. Система по п. 16, в которой система оптимизации выполнена с возможностью генерирования набора оптимизированных параметров процесса для оптимизации одной или более рабочих характеристик контура измельчения.
18. Система по п. 16 или 17, в которой один или более параметров процесса меняются вручную оператором.
19. Система по любому из пп. 16-18, в которой система оптимизации выполнена с возможностью изменения одного или более параметров процесса в соответствии с указанным анализом в режиме реального времени в реальном времени или близко к реальному времени.
20. Система по любому из пп. 16-19, в которой система оптимизации выполнена с возможностью изменения одного или более параметров процесса в соответствии с указанным анализом в режиме реального времени с получением оптимизированной производительности контура измельчения.
21. Способ оптимизации производительности контура измельчения, содержащего измельчающее устройство, в ответ на одну или более физических характеристик измельчающего устройства и/или загрузки, находящейся в нем, измеренных во время работы измельчающего устройства, при этом способ включает:
заполнение измельчающего устройства загрузкой и множеством свободно движущихся мелющих сред по любому из пп. 1-15;
работу измельчающего устройства для измельчения загрузки в соответствии с одним или более параметрами процесса, в результате чего множество свободно движущихся мелющих сред собирают данные, соответствующие одной или более физическим характеристикам измельчающего устройства и/или загрузки, находящейся в нем, во время работы;
прием и обработку собранных данных с получением анализа в режиме реального времени работы контура измельчения; и
мониторинг и составление отчета по одной более характеристикам производительности контура измельчения и, при необходимости, генерирование набора оптимизированных параметров процесса, соответствующих одному или более параметрам процесса, для улучшения производительности контура измельчения.
22. Способ по п. 21, в котором генерирование набора оптимизированных параметров процесса осуществляют в режиме реального времени или близко к реальному времени в ответ на анализ в режиме реального времени работы контура измельчения.
23. Способ по п. 21 или 22, в котором набор оптимизированных параметров процесса меняется вручную оператором.
24. Способ по любому из пп. 21-23, в котором генерирование набора оптимизированных параметров процесса осуществляют в реальном времени или близко к реальному времени в ответ на анализ в режиме реального времени работы контура измельчения.
25. Способ по любому из пп. 21-24, в котором загрузка содержит руду или другой материал, нуждающийся в измельчении.
26. Способ по п. 25, в котором загрузка может содержать суспензию руды или указанного другого материала.
27. Система или способ по любому из пп. 16-26, в которой каждая свободно движущаяся мелющая среда из множества свободно движущихся мелющих сред может быть выполнена с возможностью сбора данных, соответствующих разным физическим характеристикам.
28. Контур измельчения, включающий измельчающее устройство и систему оптимизации его производительности по любому из пп. 16-20 или 27.
| CN 104764450 A, 08.07.2015 | |||
| US 20100024518 A1, 04.02.2010 | |||
| US 20020002577 A1, 03.01.2002 | |||
| US 2016018383 A1, 21.01.2016. |

