Назначение
Изобретение относится к космической технике и может быть использовано для управления движением космических аппаратов (КА), осуществляющих в частности, очистку космоса от мусора.
Уровень техники
Под космическим мусором подразумеваются все искусственные объекты и их фрагменты в космосе, которые неисправны, не функционируют и никогда более не смогут служить никаким полезным целям, но являющиеся опасным фактором воздействия на функционирующие космические аппараты.
В настоящее время известны различные способы и устройства, используемые на КА в качестве исполнительного органа для сбора и очистки от мусора в космосе (далее - исполнительный орган очистки мусора):
 устройство выполнено на базе лазера, обеспечивающего генерацию и направленную передачу энергии для уничтожения объектов в космическом пространстве (патент РФ №2040448);
устройство выполнено на базе лазера, обеспечивающего генерацию и направленную передачу энергии для уничтожения объектов в космическом пространстве (патент РФ №2040448);
на геоцентрической орбите размещают пространственную область, обладающую большей силой сопротивления и плотности, чем сила сопротивления и плотность атмосферы на данной орбите, обеспечивающей замедление частиц космического мусора, проходящих через данную область, и сброс замедленных частиц космического мусора с геоцентрической орбиты (см. патент, РФ, №2524325);
устройство выполнено в виде малогабаритного космического буксира - сетки-захвата, имеющей в развернутом состоянии форму сегмента сферы для увода космического мусора с орбит полезных нагрузок (патент РФ №138497);
обеспечивают торможение объектов космического мусора с целью их перевода на более низкую орбиту с последующим сгоранием в атмосфере, причем для торможения объектов космического мусора на пути следования объектов космического мусора создается препятствие в виде пространственно-распределенных частиц, оказывающих ударно-кинетическое воздействие на объекты космического мусора, причем в качестве материала частиц, оказывающих ударно-кинетическое воздействие, используют продукты окисления азота (патент РФ №2478062);
устройство выполнено в виде поверхности из гибкой пленки, связанной с КА посредством тросов регулируемой длины, и контейнеров сбора мусора, в результате чего обеспечивается гашение относительной скорости частиц при взаимодействии космического мусора с материалом пленки, после чего эти частицы под действием центробежных сил поступают в контейнеры для сбора мусора (патент РФ №2046081);
устройство выполнено в виде сформированного тормозного экрана, обеспечивающего торможение элементов космического мусора вследствие соударения с ним и перевод элементов космического мусора на более низкую орбиту, и последующее сгорание элементов космического мусора в атмосфере Земли (патент РФ №2586434); и т.д.
Очевидным является тот факт, что эффективность сбора и очистки космоса при движении КА зависит от величины зоны пространственного охвата исполнительным органом очистки мусора и ориентирование ("прицеливание") его на данный мусор. Поэтому при управлении движением КА для максимального охвата пространственной зоны и ориентирование исполнительного органа очистки мусора необходимо:
- получение нужной траектории КА (управление движением центра масс);
- управление ориентацией, то есть получение нужного положения корпуса КА относительно внешних ориентиров (управление вращательным движением вокруг центра масс);
- обеспечение режима, когда эти два типа управления реализуются одновременно.
Такой принцип управления движением КА осуществляется в космическом аппарате для очистки космоса от мусора по патенту РФ №2040448, взятому за прототип.
Космический аппарат для очистки космоса от мусора содержит исполнительный орган очистки мусора (выполненный в виде устройства на базе лазера, обеспечивающего генерацию и направленную передачу энергии для уничтожения объектов в космическом пространстве), систему обнаружения частиц мусора, микро ЭВМ, электрореактивную двигательную установку для управления движением центра масс и управления вращательным движением вокруг центра масс.
Известно, что в качестве электрореактивных двигателей для управления движением центра масс (для коррекции движения КА с целью устранения ошибок выведения ракетой-носителем КА на расчетную орбиту и периодической коррекции и поддержания орбиты КА) требуются более мощные, чем для управления вращательным движением вокруг центра масс (Ю.Г. Гусев, А.В., Пильников. Роль и место электроракетных двигателей в Российской космической программе. Электронный журнал «Труды МАИ». Выпуск №60), однако принцип работы их одинаков и в их составе присутствует рабочее тело, которое расходуется в процессе эксплуатации, а именно, в момент создания управляющего механического момента на КА (см. патент, РФ, №2567896).
Электрореактивные двигатели являются универсальным устройством для управления КА, ввиду того, что они работоспособны как в ближнем космосе (высота приблизительно до 9000 км), так и на геостационарной орбите (высота приблизительно 35786 км).
Под ближним космосом следует понимать космос, в котором присутствует действие геомагнитного поля Земли, позволяющее использовать его для создания магнитными системами КА внешние управляющие механические воздействия на КА.
При движении центра масс КА, траектория которого обеспечивается электрореактивными двигателями управления движением центра масс (далее - корректирующей двигательной установкой), в момент обнаружения на пути движения частиц, засоряющих космическое пространство, система обнаружения частиц мусора выдает сигнал в микро ЭВМ, по которому микро ЭВМ выходными сигналами управляет электрореактивными двигателями вращательного движения вокруг центра масс (далее - формирователями углового управления) КА и ориентирует ("прицеливает") исполнительный орган очистки мусора на обнаруженные частицы, который их ликвидирует (в прототипе осуществляется уничтожение частиц лазерным лучом).
Недостатком устройства является наличие постоянного расхода рабочего тела для электрореактивных двигателей вращательного движения вокруг центра масс, которое практически в непрерывном режиме обеспечивает поиск частиц мусора и ориентирует исполнительный орган очистки мусора на обнаруженные частицы. Поскольку запасы рабочего тела на борту космического аппарата ограничены и не восполняются, то электрореактивные двигатели вращательного движения вокруг центра масс имеют ограниченный ресурс работы. Повышение ресурса работы КА за счет увеличения запасов рабочего тела может приводить к недопустимому увеличению массы и габаритов КА.
Целью предлагаемого изобретения является увеличение ресурса работы КА путем экономии рабочего тела.
Раскрытие изобретения
Сущность предлагаемого устройства управления движением космического аппарата для очистки космоса от мусора заключается в техническом обеспечении экономии расхода рабочего тела для электрореактивных двигателей, управляющих вращательным движением КА вокруг центра масс, в результате чего увеличивается ресурс работы КА. При этом достигается более высокая живучесть КА и эффективность очистки космоса от мусора.
Устройство включает в себя корректирующую двигательную установку, исполнительный орган очистки мусора, установленные на корпусе КА, и их управляющие входы, соединенные с выходами микроЭВМ, формирователи углового управления, установленные на корпусе КА по осям тангажа, крена и рысканья, имеющие входы, подключенные к первому порту микроЭВМ, систему обнаружения частиц мусора, соединенную с первым входом микроЭВМ.
Введение в устройство по каждой оси - тангажа, крена и рысканья: датчика компонент кинетического момента и последовательно соединенного между собой асимметричного формирователя управления, связанного с корпусом КА, и устройства управления асимметричными формирователями управления (далее - устройства управления), подключенного ко второму порту микроЭВМ, позволяет обеспечить экономию расхода рабочего тела для электрореактивных двигателей, управляющих вращательным движением КА вокруг центра масс. При этом датчик компонент кинетического момента соединен со вторым входом микроЭВМ и корпусом КА.
Асимметричные формирователи управления, ресурс работы которых не связан с расходом рабочего тела, обеспечивают формирование управляющих механических моментов, действующих на корпус КА в одном или другом направлении по тангажу, рысканью и крену, обеспечивая требуемый поворот КА вокруг центра масс. При этом электрореактивные двигатели, управляющие вращательным движением КА вокруг центра масс, могут не участвовать в повороте и, тем самым, не расходовать рабочее тело. Электрореактивные двигатели, управляющие вращательным движением КА вокруг центра масс, включаются (формируют управляющий механический момент на КА) лишь при необходимости, для обеспечения быстрого маневра КА, воздействуя на него совместно с асимметричным формирователем управления, или для сброса кинетического момента КА, накопленного из-за воздействия внешних паразитных сил, с целью поддержания угловой скорости КА в допустимых заданных пределах. Известно, что в том случае, если на корпус КА воздействуют моменты каких-нибудь внешних возмущений (сил аэродинамического сопротивления, светового давления, гравитационных сил, воздействия метеорной пыли, магнитные и плазменные воздействия или других внешних сил), то корпус с течением определенного времени приобретает некоторую угловую скорость вокруг оси, направление которой определяется направлением суммарного возмущающего момента (см. А.Г. Иосифьян, Электромеханика в космосе. Космонавтика, астрономия» №3, 1977 г) и эту «паразитную» скорость можно ликвидировать только внешним моментом.
Графические иллюстрации
На приведенной фигуре 1 в качестве графической иллюстрации приведена структурная схема устройства управления движением космического аппарата для очистки космоса от мусора, на фигуре 2 - первый вариант исполнения асимметричного формирователя управления, на фигуре 3 - второй вариант исполнения асимметричного формирователя управления, на фигуре 4 - третий вариант исполнения асимметричного формирователя управления, на фигуре 5 - циклограмма работы устройства управления движением космического аппарата для очистки космоса от мусора, на фигуре 6 - циклограмма работы устройства управления движением космического аппарата для очистки космоса от мусора для второго варианта исполнения формирователей асимметричного управления, на фигуре 7 - циклограмма работы устройства управления движением космического аппарата для очистки космоса от мусора для третьего варианта исполнения формирователей асимметричного управления.
Осуществление изобретения
На структурной схеме устройства управления движением космического аппарата для очистки космоса от мусора (фиг. 1) обозначены следующие позиции:
1 - корректирующая двигательная установка КДУ;
2 - формирователь углового управления ФУУ;
3 - корпус (космического аппарата);
4 - исполнительный орган очистки мусора ИООМ;
5 - система обнаружения частиц мусора СОЧМ;
6 - микроЭВМ;
7 - асимметричный формирователь управления АФУ;
8 - устройство управления УУ;
9 - датчик компонент кинетического момента ДККМ.
В предлагаемом устройстве присутствуют три идентичных канала, обозначенных штрихпунктирной линией:
10 - ось Z (по тангажу);
11 - ось X (по крену);
12 - ось Y (по рысканью).
Корректирующая двигательная установка КДУ 1, исполнительный орган очистки мусора ИООМ 4 устанавливаются на корпусе КА 3 и их управляющие входы соединены с выходами микроЭВМ 6. Один из входов микроЭВМ 6 соединен с выходом системы обнаружения частиц мусора СОЧМ 5.
Формирователи углового управления ФУУ 2 устанавливаются на корпусе 3 КА по осям тангажа, крена и рысканья, и их входы соединены с первым портом (РА) микроЭВМ6.
По осям тангажа, крена и рысканья введены асимметричные формирователи управления АФУ 7, соединенные через введенные устройства управления УУ 8 со вторым портом (РВ) микроЭВМ 6. Второй вход микроЭВМ 6 соединен с введенным датчиком компонент кинетического момента ДККМ 9, установленным на корпусе 3 космического аппарата.
Принцип работы КДУ 1 и ФУУ 2, управляемых микроЭВМ 6, и схемы их расположения на КА, общеизвестны и широко описаны в различных источниках информации. Так, например, описание работы КДУ 1 и схемы расположения ее на КА приведены в статье, опубликованной в журнале «Труды МАИ» (В.П. Ходненко, М.В. Колосова. Корректирующая двигательная установка на базе стационарного плазменного двигателя 100 для перспективных космических аппаратов метеорологического назначения. Электронный журнал «Труды МАИ». Выпуск №60). Схема расположения реактивных двигателей ФУУ 2 по осям в связанной системе координат КА приведены в книге - (Б.В. Раушенбах, Е.Н. Токарь. Управление ориентацией космических аппаратов. Ориентация искусственных спутников в гравитационных и магнитных полях. «Наука», М., 1974. стр. 111-113).
Работа СОЧМ 5 и ИООМ 4 представлена в прототипе, кроме того, способы и устройства, которые могут использоваться на КА в качестве ИООМ 4, широко представлены в описании заявляемого устройства выше.
Устройство управления УУ 8 может быть выполнено в виде электронного ключа и обеспечивает включение и выключение АФУ 7 по сигналам, поступающим с микроЭВМ 6.
В качестве датчика компонент кинетического момента ДККМ 9, устанавливаемого на корпусе 3 КА, можно использовать датчик угловых скоростей (см. патент РФ №2281232). Например, можно применить датчики, основанные на микроэлектромеханических системах (МЭМС), выпускаемых Компанией «Лаборатория Микроприборов», г. Зеленоград.
Описание работы устройства
При описании устройства будем рассматривать работу одного канала, например, по оси Z (10), т.к. работа остальных идентичных двух каналов ось X (11) и ось Y (12) аналогична.
В связанной системе координат КА OXYZ (начало координат совпадает с центром масс КА; остальные оси расположены вдоль строительных осей КА) определяются следующие углы:
крен - вращение вокруг оси ОХ;
рыскание - вращение вокруг оси OY;
тангаж - вращение вокруг оси OZ.
Устройство функционирует следующим образом.
При движении КА по траектории центра масс КА, обеспечиваемой КДУ 1 (включаемой лишь периодической для коррекции и поддержания орбиты КА), формирователи углового управления ФУУ 2 выполняют функцию поворотов КА вокруг центра масс, обеспечивая, тем самым, зону пространственного охвата СОЧМ 5 и ИООМ 4, а также ориентирование ИООМ 4 на мусор для его сбора или ликвидации. Поэтому ФУУ 2 практически постоянно находится в рабочем состоянии, обеспечивая формирование механического момента на КА и расходуя при этом рабочее тело. Постоянный расход рабочего тела с учетом ограниченного его запаса (который не пополняется в космосе) имеет ограниченный ресурс ФУУ 2, а значит и ограниченный ресурс эффективной работы КА.
Для разгрузки ФУУ 2, т.е. уменьшения времени его рабочего состояния (расхода рабочего тела), служит АФУ 7, который может обеспечивать управляемые повороты КА вокруг центра масс, не расходуя рабочего тела.
Включение и выключение АФУ 7 осуществляется по сигналу микроЭВМ 6 через УУ 8. Контроль угла поворота осуществляет микроЭВМ 6 по сигналам с датчиков угловых скоростей ДККМ 9.
В качестве микроЭВМ 6 можно использовать, например, отечественные однокристальные микроЭВМ серии 1816, которая включает в себя следующие неотъемлемые элементы: микропроцессор, ОЗУ, ПЗУ, устройства ввода и вывода данных (см. патент, РФ, N 2571728).
В микроЭВМ 6 с Центральной ЭВМ поступают командно-программная информация (КПИ). Обмен центральной ЭВМ (локальный контроллер) с микроЭВМ осуществляется по мультиплексному каналу обмена (требование ГОСТ Р 52070-2003), а с центром наземного управления (или с центра управления с геостационарной орбиты) по телеметрии (ТМ).
Управляемые повороты КА вокруг центра масс с помощью АФУ 7 осуществляются как в режиме поиска частиц мусора, так и в режиме ориентации на данный мусор, т.е. при обнаружении частиц мусора по сигналу СОЧМ 5, поступающему в микроЭВМ 6, формируется управляемый поворот КА вокруг центра масс для ориентации (наведения) ИООМ 4 на данные частицы мусора.
ФУУ 2 включается для сброса кинетического момента КА с целью поддержания угловой скорости КА в допустимом заданном диапазоне от - ωамакс до + ωамакс, определяемых величинами накапливаемых за счет внешних возмущений кинетических моментов. При достижении угловой скорости КА + ωамакс или - ωамакс по сигналам с ДККМ 9 микро ЭВМ 6 включает ФУУ 2 для сброса кинетического момента КА.
Кроме того, при необходимости, ФУУ 2 может включаться для обеспечения быстрого поворота КА вокруг центра масс (быстрого маневра) совместно с АФУ 7.
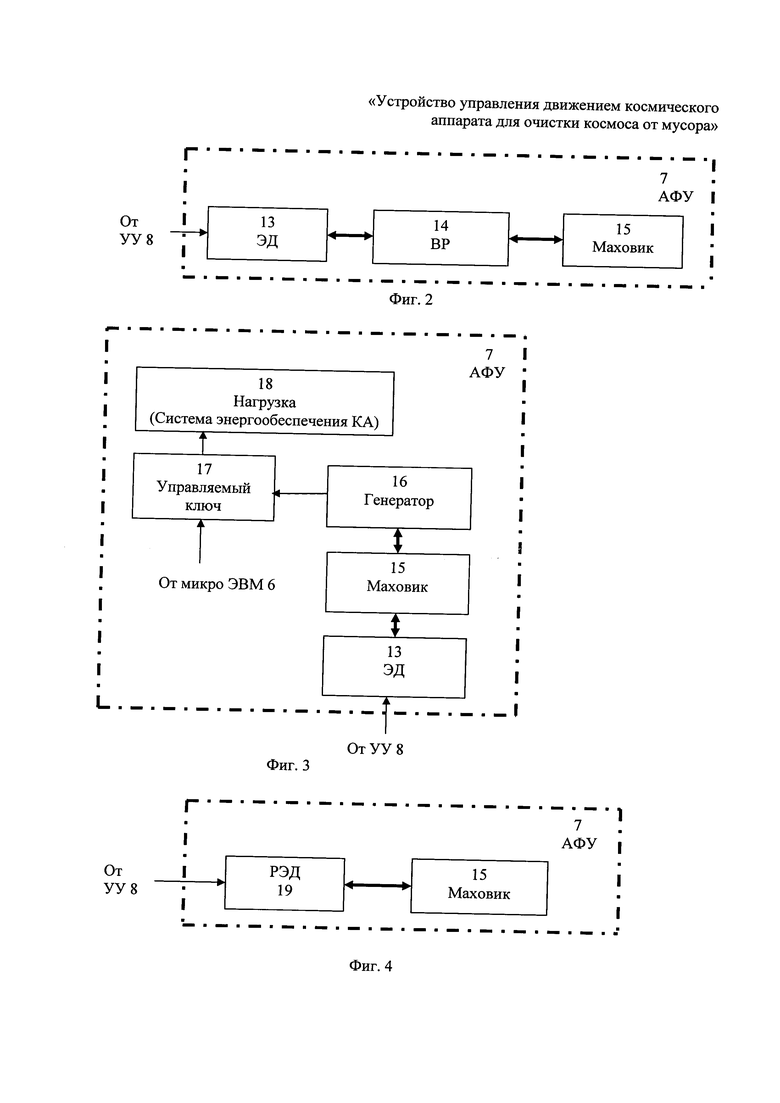
Асимметричный формирователь управления АФУ 7 может быть выполнен, например, в виде устройства, представленного на фиг. 2, и содержащего составляющие, обозначенные позициями:
13 - электродвигатель ЭД;
14 - волновой редуктор;
15 - маховик.
При рассмотрении функционирования такого устройства будем пользоваться циклограммой, приведенной на фиг. 5. Законы изменения на циклограмме показаны условно в виде прямых линий, соединяющих крайние значения.
Волновой редуктор BP 14 и маховик 15 выполнены на валу ротора электродвигателя 13, управляемого УУ 8 и устанавливаемого на корпусе 3 КА, причем вектор кинетического момента ротора электродвигателя 13 параллелен оси космического аппарата OZ.
При включенном электродвигателе ЭД 13 (временной диапазон 1а - участок разгона, включение - момент времени t1) динамическим моментом Мд раскручивается маховик 15 (увеличивается его угловая скорость Ω) через волновой редуктор 14 и накапливает кинетическую энергию.
Известно, что изменением скорости вращения (угловой скорости) маховика, т.е. созданием управляющего механического момента, воздействующего на корпус КА, можно изменять его угловую скорость и таким образом осуществлять управляемый поворот КА вокруг цента масс (см. Б.В. Раушенбах, Е.Н. Токарь. Управление ориентацией космических аппаратов. Ориентация искусственных спутников в гравитационных и магнитных полях. «Наука», М., 1974. стр. 107). Управление поворотом КА осуществляется за счет обмена кинетического момента между инерционной массой-маховиком и корпусом КА. Данный поворот основывается на законе сохранения момента количества движения системы тел (КА - маховик).
Если предположить, что на такую систему тел не действуют внешние моменты, то закон сохранения момента количества движения для случая плоского вращательного движения относительно некоторой оси формулируется в виде

где Ja, Jм соответственно моменты инерции КА и маховика,
ωа, Ωм соответственно их текущие угловые скорости,
ωа(0), Ωм(0) начальные значения угловых скоростей
(Научно-технический вестник Санкт-Петербургского государственного университета информационных технологий, механики и оптики, 2009, №5(63), стр. 48).
Произведения Ja⋅ωа и Jм⋅Ωм называются моментами количества движения КА и маховика соответственно.
Из выражения (1) видно, что любое изменение угловой скорости вращения маховика ΔΩм=Ωм-Ωм(0), приводит к изменению угловой скорости КА Δωа=ωа-ωа(0), но в противоположном направлении и в соотношении, определяемом моментами инерции.
Раскручивание маховика (увеличение скорости) осуществляется при действии динамического момента (момента электродвигателя 13)

где Н(t)=Jм⋅Ωм(t) - кинетический момент,
Δt - время изменения угловой скорости движения маховика (ΔΩм).
Динамический момент определяется следующим соотношением (см. патенты, РФ, 2521617, 1840286):

где Мэм - электромагнитный момент электродвигателя,
Мс - момент сопротивления вращению ротора электродвигателя.
Обычно на практике Мэм значительно превышает Мс.
Величина Мс определяется технологией изготовления, качеством опорных подшипников, нагрузкой на подшипники, давлением окружающей среды, температурой, временем наработки, паразитными электромагнитными силами в электродвигателе 13, а также сопротивлением волнового редуктора BP 14, зависящего от его коэффициент полезного действия (КПД).
В зависимости от передаточного числа волнового редуктора (отношения скорости вращения вала на входе к скорости вращения вала на выходе) его КПД, равный отношению механической выходной мощности к входной мощности, может изменяться, однако для выбранного постоянного значения передаточного числа волнового редуктора он является величиной постоянной (см. ГОСТ Р 50891-96, разработанный Всероссийским научно-исследовательским институтом стандартизации и сертификации в машиностроении) и составляет, например, 0,8 при передаточном числе 100.
Из выражений (1, 2) получаем

Изменение угловой скорости КА Δωа в соответствии с выражением (4) от начального значения, находящегося в диапазоне от - ωамакс до + ωамакс, до максимального значения (временной диапазон 1а) приводит к пропорциональному (интегральная зависимость) увеличению угла поворота космического аппарата ϕ от текущего значения ϕт до максимального, определяемых моментом выключения ЭД 13 (момент времени t2) по сигналу микро ЭВМ 6, поступающему на ЭД 13 через УУ 8.
При выключенном электродвигателе ЭД 13 (временной диапазон 2в, участок торможения) значительная доля накопленной маховиком 15 кинетической энергии "отбирается" волновым редуктором BP 14 и выделяется в виде тепловой энергии, ввиду того, что он обладает существенным механическим торможением. Это объясняется конструктивными особенностями волнового редуктора BP 14, а именно, наличием в нем генератора волн в виде крутящегося кулачка, эксцентрика или другого механизма, растягивающего гибкий элемент до образования зацепления с неподвижным элементом и с учетом того, что волновая передача объединена с электродвигателем, то при выключенном электродвигателе ЭД 13 тормозной момент волнового редуктора 14 значительно возрастает. В результате чего существенно возрастает скорость обмена кинетического момента между инерционной массой-маховиком и корпусом КА, и в связи с этим угол поворота космического аппарата ϕ во временном диапазоне 2в изменяется незначительно. Угловая скорость маховика Ω в конце данного временного диапазона (момент времени t3) приобретает начальное нулевое значение, а угловая скорость КА ωа в соответствии с выражением (1) - начальное значение временного диапазона 1а (без учета внешних возмущающих воздействий на КА).
Таким образом, осуществляется управляемый угол поворота КА вокруг центра масс, который формируется по сигналам микроЭВМ 6. Контроль угла поворота осуществляет микроЭВМ 6 с учетом сигналов, поступающих с датчиков компонент кинетического момента ДККМ 9 (датчика угловых скоростей).
В неуправляемом режиме (временной диапазон 3с, 6с) КА движется с угловой скоростью вокруг центра масс под воздействием кинетического момента, накапливаемого за счет внешних возмущений.
На временных диапазонах 4а и 5в приведен управляемый угловой поворот КА вокруг центра масс, который по принципу работу является аналогичным рассмотренному во временных диапазонах 1а и 2в, только с осуществлением поворота в противоположном направлении.
Для поддержания угловой скорости КА в диапазоне от ωамакс до + ωамакс, определяемых величинами накапливаемых за счет внешних возмущений кинетических моментов, при достижении угловой скорости КА + ωамакс или - ωамакс по сигналам с ДККМ 9 микроЭВМ 6 включает ФУУ 2 для сброса кинетического момента КА.
Асимметричный формирователь управления АФУ 7 также может быть выполнен в виде устройства, представленного на фиг. 3, и содержащего составляющие, обозначенные позициями:
13 - электродвигатель ЭД;
15 - маховик;
16 - генератор,
17 - управляемый ключ;
18 - нагрузка.
При рассмотрении функционирования этого устройства будем пользоваться циклограммой, приведенной на фиг. 6. Законы изменения на циклограмме показаны условно в виде прямых линий, соединяющих крайние значения.
Маховик 15 и генератор 16 выполнены на валу ротора электродвигателя ЭД 13, управляемого УУ 8 и устанавливаемого на корпусе 3 КА, причем вектор кинетического момента ротора электродвигателя 13 параллелен оси космического аппарата OZ.
Выход генератора 16 через управляемый микроЭВМ 6 ключ 17 соединен с нагрузкой 18.
При включенном электродвигателе 13 (временной диапазон 1a1 - участок разгона, включение - момент времени t1) динамическим моментом Мд раскручивается маховик 15 (увеличивается его угловая скорость Ω) и накапливает кинетическую энергию.
Управляемый ключ 17 закрыт, генератор 16 находится в ненагруженном состоянии и отбор кинетической энергии с маховика 15 генератором 16 незначительный. В соответствии с выражением (1) происходит увеличение угловой скорости КА ωа. Изменение угловой скорости КА Δωа от начального значения, находящегося в диапазоне от - ωамакс до + ωамакс, до максимального значения (временной диапазон 1a1) приводит к пропорциональному (интегральная зависимость) увеличению угла поворота космического аппарата ϕ от текущего значения ϕт до максимального, определяемых моментом выключения ЭД 13 (момент времени t2) по сигналу микро ЭВМ 6, поступающему на ЭД 13 через УУ 8.
При выключенном электродвигателе ЭД 13 (временной диапазон 1а2, участок движения по инерции) происходит незначительное торможение маховика 15 (уменьшение его угловой скорости Ω), т.к. генератор 16 находится в ненагруженном состоянии и "отбор" им кинетической энергии с маховика 15 незначителен (сопротивление вращения ротора электродвигателя ЭД 13, определяемое технологией изготовления, качеством опорных подшипников, нагрузкой на подшипники, давлением окружающей среды, температурой, временем наработки незначительно). Нарастание угла поворота КА ϕ в данном временном диапазоне 1а2 незначительно замедляется.
При включении управляемого ключа 17 сигналом микроЭВМ 6 (момент времени t3) нагрузка 18 подключается к выходу генератора 16 и во временном диапазоне 2в (участок торможения) значительная доля накопленной кинетической энергии маховиком 17 "отбирается" нагруженным генератором 16 и выделяется в виде тепловой энергии на нагрузке 18 (или преобразуется в системе энергоснабжения КА). В результате чего существенно возрастает скорость обмена кинетического момента между инерционной массой-маховиком и корпусом КА, и в связи с этим угол поворота космического аппарата ϕ во временном диапазоне 2в изменяется незначительно. Угловая скорость маховика Ω в конце данного временного диапазона (момент времени t4) приобретает начальное нулевое значение, а угловая скорость КА ωа в соответствии с выражением (1) - начальное значение временного диапазона 1a1 (без учета внешних возмущающих воздействий на КА).
В неуправляемом режиме (временной диапазон 3с, 6с) КА движется с угловой скоростью вокруг центра масс под воздействием кинетического момента, накапливаемого за счет внешних возмущений.
На временных диапазонах 4а и 5в приведен управляемый угловой поворот КА вокруг центра масс, который по принципу работу является аналогичным рассмотренному во временных диапазонах 1a1, 1а2 и 2в, только с осуществлением поворота в противоположном направлении и при отсутствии участка движения по инерции (управляемый ключ 17 открывается сразу при достижении определенного значения угловой скорости маховика Ω).
Асимметричный формирователь управления АФУ 7 также может быть выполнен в виде устройства, представленного на фиг. 4, и содержащего составляющие, обозначенные позициями:
19 - реверсивный электродвигатель РЭД;
15 - маховик.
При рассмотрении функционирования данного устройства будем пользоваться циклограммой, приведенной на фиг. 7. Законы изменения на циклограмме показаны условно в виде прямых линий, соединяющих крайние значения.
Маховик 15 выполнен на валу ротора РЭД 19, управляемого УУ 8 и устанавливаемого на корпусе 3 КА, причем вектор кинетического момента ротора РЭД 19 параллелен оси космического аппарата OZ.
При включенном РЭД 19 (временной диапазон 1a1 - участок разгона, включение - момент времени t1) динамическим моментом Мд раскручивается маховик 15 (увеличивается его угловая скорость Ω) и накапливает кинетическую энергию.
В соответствии с выражением (1) происходит увеличение угловой скорости КА ωа. Изменение угловой скорости КА Δωа от начального значения, находящегося в диапазоне от - ωамакс до + ωамакс, до максимального значения (временной диапазон 1a1) приводит к пропорциональному увеличению (интегральная зависимость) угла поворота космического аппарата ϕ от текущего значения ϕт до максимального, определяемого моментом выключения РЭД 19 (момент времени t2) по сигналу микро ЭВМ 6, поступающему на РЭД 19 через УУ 8.
При выключенном РЭД 19 (временной диапазон 1а2, участок движения по инерции) практически не происходит торможение маховика 15 (уменьшение его угловой скорости Ω), т.к. сопротивление вращения ротора РЭД 19, определяемое технологией изготовления, качеством опорных подшипников, нагрузкой на подшипники, давлением окружающей среды, температурой, временем наработки и т.д. очень незначительно. Нарастание угла поворота КА ϕ в данном временном диапазоне 1а2 практически не замедляется.
Участок торможения (временной диапазон 2в) обеспечивается режимом торможения РЭД 19 противовключением (реверсивным торможением), т.е. обеспечивается электрическое торможение противотоком - это торможение путем изменения направления момента, развиваемого РЭД 19, на противоположное направлению вращения (момент времени t3) за счет, например, смены полярности напряжения, подводимого к обмотке якоря. В результате торможения противовключением, двигатель быстро останавливается (угловая скорость маховика Ω приобретает нулевое значение) и в момент остановки (момент времени t4) РЭД 19 отключается от напряжения во избежание вращения ротора в обратном направлении (для этого РЭД 19 должен иметь, например, встроенный датчик частоты вращения ротора, как, например, в двигателе-маховике ДМ1-20, выполненного на основе управляемого моментного бесконтактного двигателя постоянного тока, выпускаемого в АО "Корпорация "ВНИИЭМ", г. Москва).
В результате чего существенно возрастает скорость обмена кинетического момента между инерционной массой-маховиком и корпусом КА, и в связи с этим угол поворота космического аппарата ϕ во временном диапазоне 2в изменяется незначительно. Угловая скорость КА ωа в соответствии с выражением (1) в конце данного временного диапазона (момент времени t4) начальное значение временного диапазона 1a1 (без учета внешних возмущающих воздействий на КА).
В неуправляемом режиме (временной диапазон 3с, 6с) КА движется с угловой скоростью вокруг центра масс под воздействием кинетического момента, накапливаемого за счет внешних возмущений.
На временных диапазонах 4а и 5в приведен управляемый угловой поворот КА вокруг центра масс, который по принципу работу является аналогичным рассмотренному во временных диапазонах 1a1, 1а2 и 2в, только с осуществлением поворота в противоположном направлении и при отсутствии участка движения по инерции (режим торможения РЭД 19 включается сразу при достижении определенного значения угловой скорости маховика Ω).
При использовании РЭД 19 в режиме реверсивного торможения следует учитывать, что РЭД 19 должен выдерживать токи, превышающие токи короткого замыкания, и, кроме того, для снижения его перегрузок при торможении следует оптимизировать выбор максимальных скоростей вращения ротора Ω.
Формирователь углового управления ФУУ 2 также может быть выполнен в виде магнитной системы сброса кинетического момента (А.П. Коваленко. Магнитные системы управления космическими летательными аппаратами. М., «Машиностроение», 1975 г., стр. 103-105).
Данный формирователь углового управления ФУУ 2 может быть использован только для ближнего космоса, ввиду того, что в качестве исполнительных органов в данных магнитных системах используются, например, электромагниты, формирующие магнитные моменты, которые взаимодействуя с геомагнитным полем Земли, создают внешние управляющие механические моменты на КА.
Для поддержания угловой скорости КА в диапазоне от - ωамакс до + ωамакс (см. фиг. 5), определяемых величинами накапливаемых за счет внешних возмущений кинетических моментов, при достижении угловой скорости КА + ωамакс или - ωамакс по сигналам с ДККМ 9 микро ЭВМ 6 включает ФУУ 2 для сброса кинетического момента КА.
Основным достоинством данного формирователя углового управления ФУУ 2 является отсутствие рабочего тела, ограничивающего ресурс работы КА.
Таким образом, предлагаемое устройство управления движением космического аппарата для очистки космоса от мусора обеспечивает экономичный режим расхода рабочего тела, позволяющий увеличить ресурс работы КА до требуемых значений, при этом достигается более высокая эффективность очистки, ввиду того, что вращающим маховиком обеспечивается более плавный и точный поворот КА, чем реактивными двигателями.
Кроме того, данное устройство позволяет обеспечить быстрый поворот вокруг центра масс (быстрый маневр), а также обеспечить высокую живучесть, в виду того, что при выходе из строя или формирователей углового управления, или асимметричных формирователей управления работоспособность КА, хотя и с меньшей эффективностью, сохраняется.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ ориентации космического аппарата и устройство для реализации способа | 2016 |
|
RU2618664C1 |
| Способ управления движением сложной формации группы космических аппаратов | 2017 |
|
RU2683700C1 |
| Способ управления движением космического аппарата с управляемой ориентацией | 2020 |
|
RU2767648C1 |
| Способ динамичной высокоточной ориентации и стабилизации космического аппарата | 2018 |
|
RU2702932C1 |
| Способ управления космическим аппаратом дистанционного зондирования Земли | 2019 |
|
RU2722598C1 |
| Устройство сброса кинетического момента и управления ориентацией космического аппарата с использованием магнитной системы | 2022 |
|
RU2797430C1 |
| Способ спутниковой гравитационной градиентометрии | 2020 |
|
RU2745364C1 |
| Способ управления движением центра масс низкоорбитального космического аппарата | 2023 |
|
RU2837207C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА С УПРАВЛЯЕМОЙ ОРИЕНТАЦИЕЙ | 2017 |
|
RU2669481C1 |
| Способ разгрузки инерциальных исполнительных органов космического аппарата и устройство для реализации способа | 2024 |
|
RU2834705C1 |




Изобретение относится к космической технике и может быть использовано для управления движением космических аппаратов (КА) при осуществлении очистки космоса от мусора. КА содержит корректирующую двигательную установку, исполнительный орган очистки мусора, формирователи углового управления, систему обнаружения частиц мусора, микроЭВМ, по осям тангажа, крена и рысканья асимметричные формирователи управления, устройства управления и датчики компонент кинетического момента, соединенные определенным образом. Устройство обеспечивает экономичный режим расхода рабочего тела, позволяющий увеличить ресурс работы КА до требуемых значений, быстрый поворот вокруг центра масс, высокую живучесть в виду того, что при выходе из строя формирователей углового управления или асимметричных формирователей управления работоспособность КА сохраняется. 4 з.п. ф-лы, 7 ил.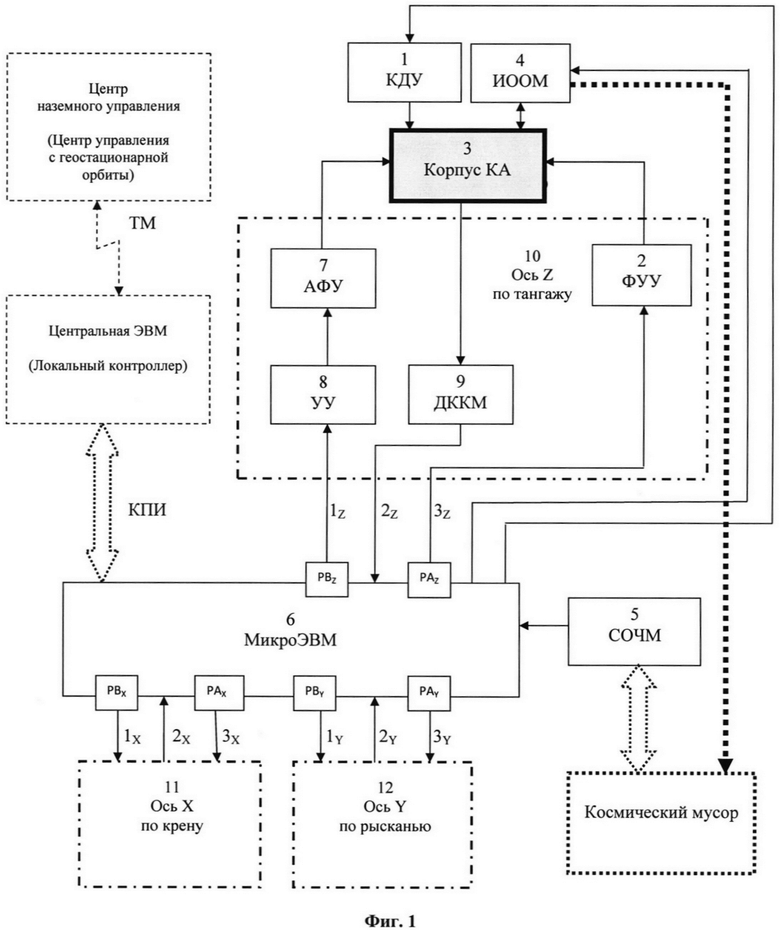
1. Устройство управления движением космического аппарата для очистки космоса от мусора, включающее в себя корректирующую двигательную установку, исполнительный орган очистки мусора, установленные на корпусе космического аппарата, и их управляющие входы, соединенные с выходами микроЭВМ, формирователи углового управления, установленные на корпусе космического аппарата по осям тангажа, крена и рысканья, имеющие входы, подключенные к первому порту микроЭВМ, систему обнаружения частиц мусора, соединенную с первым входом микроЭВМ, отличающееся тем, что по каждой оси - тангажа, крена и рысканья - введены: датчик компонент кинетического момента и последовательно соединенные между собой асимметричный формирователь управления, связанный с корпусом космического аппарата, и устройство управления, подключенное ко второму порту микроЭВМ, при этом датчик компонент кинетического момента соединен со вторым входом микроЭВМ и корпусом космического аппарата.
2. Устройство по п. 1, отличающееся тем, что ассиметричный формирователь управления выполнен в виде последовательно соединенных: электродвигателя, установленного на корпусе космического аппарата, волнового редуктора и маховика.
3. Устройство по п. 1, отличающееся тем, что ассиметричный формирователь управления выполнен в виде последовательно соединенных электродвигателя, маховика и генератора, установленных на валу ротора электродвигателя, а также последовательно соединенных управляемого ключа и нагрузки, причем вход управляемого ключа соединен с выходом генератора, а его управляющий вход - с выходом микроЭВМ.
4. Устройство по п. 1, отличающееся тем, что асимметричный формирователь управления выполнен в виде реверсивного электродвигателя и установленного на валу его ротора маховика.
5. Устройство по п. 1, отличающееся тем, что формирователь углового управления выполнен в виде магнитной системы сброса кинетического момента.
| КОСМИЧЕСКИЙ АППАРАТ ДЛЯ ОЧИСТКИ КОСМОСА ОТ МУСОРА | 1992 |
|
RU2040448C1 |
| СПОСОБ ДЛЯ ОЧИСТКИ ОТ КОСМИЧЕСКОГО МУСОРА | 2010 |
|
RU2524325C2 |
| Формующая головка | 1960 |
|
SU138497A1 |
| СПОСОБ ОЧИСТКИ КОСМОСА ОТ ОБЪЕКТОВ КОСМИЧЕСКОГО МУСОРА | 2011 |
|
RU2478062C2 |
| КОСМИЧЕСКИЙ САЧОК | 1991 |
|
RU2046081C1 |
| СПОСОБ ОЧИСТКИ ОКОЛОЗЕМНОГО КОСМИЧЕСКОГО ПРОСТРАНСТВА ОТ КОСМИЧЕСКОГО МУСОРА | 2015 |
|
RU2586434C1 |

