Изобретение относится к подъемно-транспортным устройствам для перемещения подвешенных грузов в горизонтальной и вертикальной плоскостях, представляет новый тип направляющих механизмов для получения прямолинейного движения рабочего органа и может быть использовано в автоматических линиях и роботах-манипуляторах при сборочных, ремонтных и фасовочных операциях со штучными изделиями в промышленности, машиностроении, портовом и гаражном хозяйстве.
Известен направляющий механизм Поселье-Липкина для получения прямолинейного движения рабочего органа, содержащий приводной двигатель и многозвенное шарнирно-рычажное преобразующее устройство [1], - аналог.
Недостатками этого механизма являются:
1. Сложность конструкции, необходимость его точного изготовления и сборки (механизм содержит 8 двуплечих рычагов с обязательным абсолютно точным соотношением их длин, соединенных в замкнутую трехконтурную кинематическую цепь посредством 10 шарниров, из которых 4 шарнира выполнены многократно соединенными на одной оси).
2. Механизм имеет большие габариты и вес, что не позволяет применять его в малогабаритных роботах-манипуляторах.
3. Для перемещения подвешенного груза с требуемой по технике безопасности очень малой скоростью не более 0,25 м/с [2, с. 103] между ведущим двуплечим рычагом данного механизма и приводным двигателем необходимо устанавливать сложный понижающий редуктор с большим передаточным отношением в 50-70 раз.
4. При остановке приводного двигателя происходит аварийное падение с высоты переносимого подвешенного груза.
Наиболее близким к предлагаемому изобретению является применяемый в роботах-манипуляторах и грузовых кранах механизм для прямолинейного перемещения подвешенного груза, содержащий основание, приводной двигатель, преобразующее устройство и подвесное устройство шарнирного присоединения переносимого груза, в котором преобразующее устройство выполнено в виде установленных с приводом от двигателя трех канатных барабанов с понижающими планетарными редукторами с большим передаточным отношением (в 50-70 раз для обеспечения требуемых малых скоростей перемещения груза), а подвесное устройство шарнирного присоединения переносимого груза выполнено в виде замкнутой многорычажной кинематической цепи из двуплечих рычагов в составе шарнирно-сочлененной поворотной стрелы [3, с. 41, рис. 4], - прототип.
Недостатками известного механизма являются:
1. Сложность конструкции как преобразующего устройства, содержащего сложные планетарные понижающие редукторы, так и подвесного устройства шарнирного присоединения переносимого груза, выполненного в виде замкнутой шарнирно-сочлененной многорычажной кинематической цепи в составе поворотной стрелы.
2. Большие габариты и вес из-за необходимости выполнения двуплечих рычагов большой длины для исключения их заклинивания при их повороте внутри замкнутой кинематической цепи привода.
3. Механизм является приближенно-прямолинейным, так как при горизонтальном перемещении подвешенного груза происходит его неравномерное движение со значительными колебаниями по высоте (согласно [3, с. 43, рис. 5] в транспортирующих механизмах серийных кранов подвешенный груз перемещается с колебаниями по высоте до 0,7 метра от горизонтали), что приводит к повышенным динамическим нагрузкам на детали механизма и на приводной двигатель и требует его повышенной мощности - это сокращает долговечность и надежность работы подъемно-транспортной машины.
4. Ограниченные транспортные возможности - не обеспечивается одновременное и согласованное между собой встречное или попутное транспортирование по горизонтали нескольких подвешенных грузов.
5. Для остановки и фиксации подвешенного груза на заданной высоте и в заданном рабочем положении (например, при выключенном двигателе) требуется применение в приводе сложных тормозных устройств, которые имеют сильный нагрев и ненадежны в эксплуатации, что может привести к падению с высоты тяжелого груза.
Технической задачей является упрощение конструкции, снижение габаритов и веса механизма для прямолинейного перемещения подвешенного груза, обеспечение перемещения груза по горизонтали с малыми скоростями без применения понижающего обороты двигателя редуктора и надежное удержание груза на заданной высоте без применения тормозов.
Решение поставленной технической задачи достигается за счет выполнения преобразующего устройства в виде подвижного ходового винта в сочетании с выполнением подвесного устройства шарнирного присоединения переносимого груза в виде одноплечего рычага маятникового балансира или за счет выполнения преобразующего устройства в виде неподвижного ходового винта в сочетании с выполнением подвесного устройства в виде маятниковой подвесной рамы с установленным на этой раме приводным двигателем, кинематически связанным посредством ременной передачи с установленной на неподвижном ходовом винте подвижной ходовой гайкой. Ходовой винт может быть снабжен промежуточной опорой, разделяющей его на участки с однонаправленной или разнонаправленной левой и правой резьбой одинакового или разного между собой шага, а каждый из расположенных по разные стороны от промежуточной опоры участков резьбы взаимодействует с раздельно установленными на ходовом винте маятниковыми одноплечими рычагами, шарнирно соединенными с одним или несколькими подвешенными грузами.
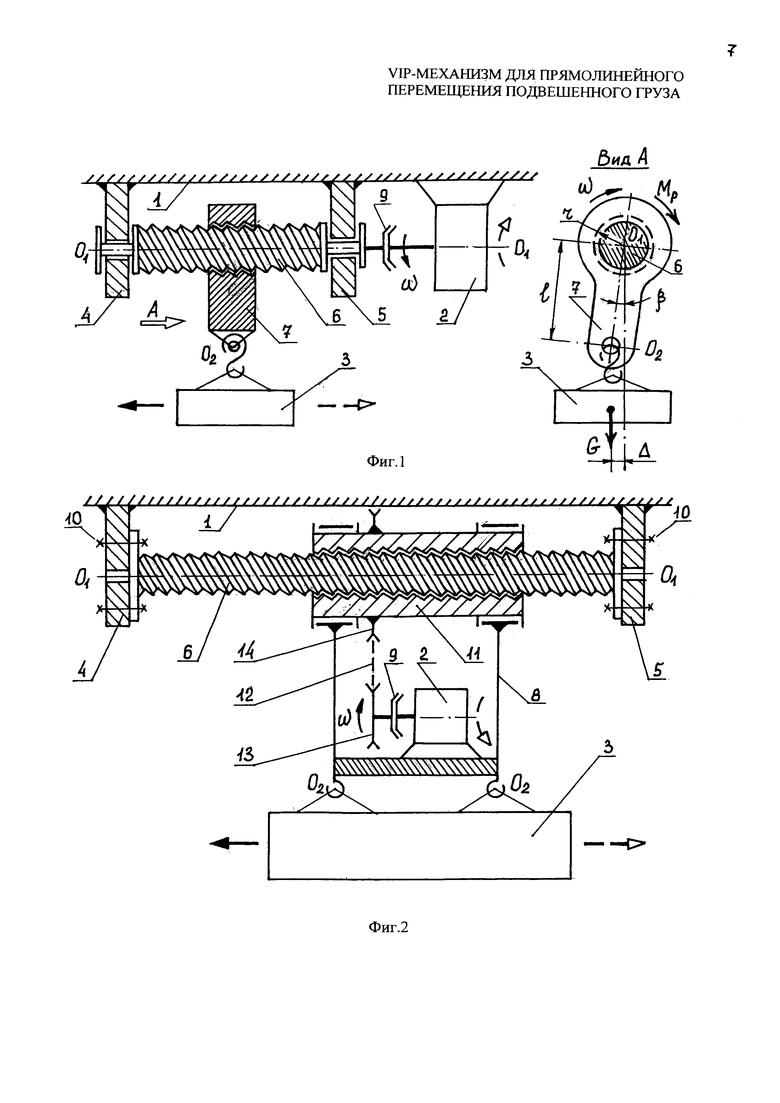
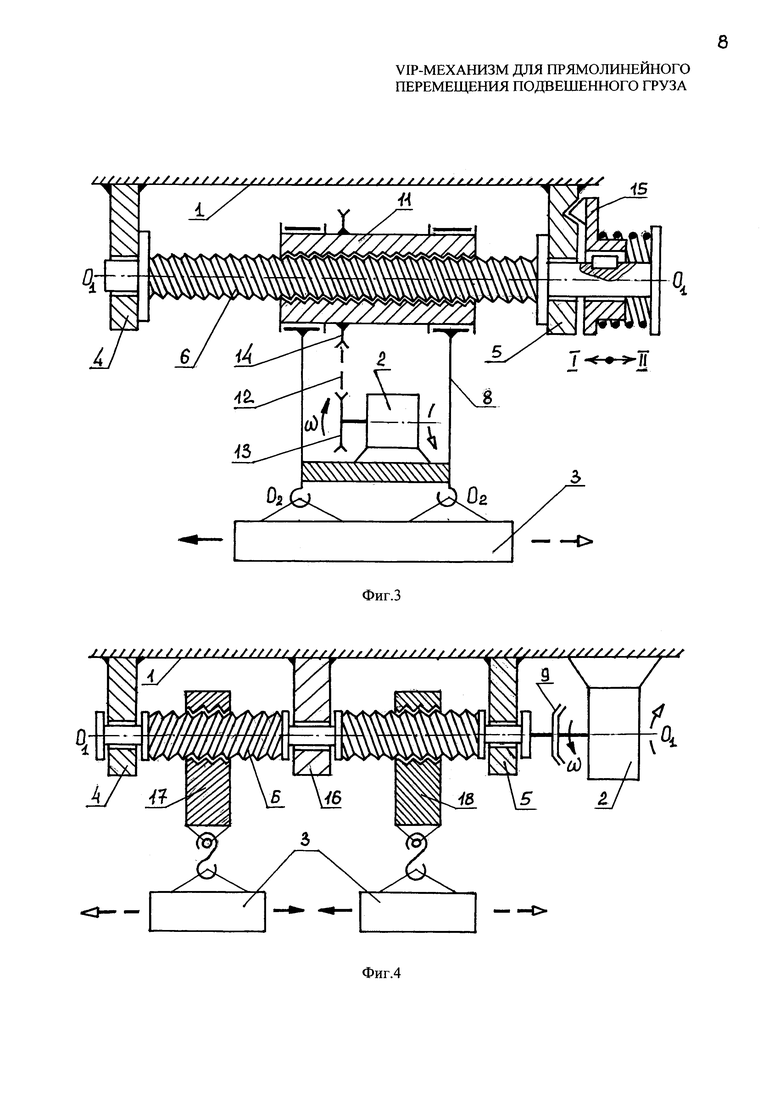
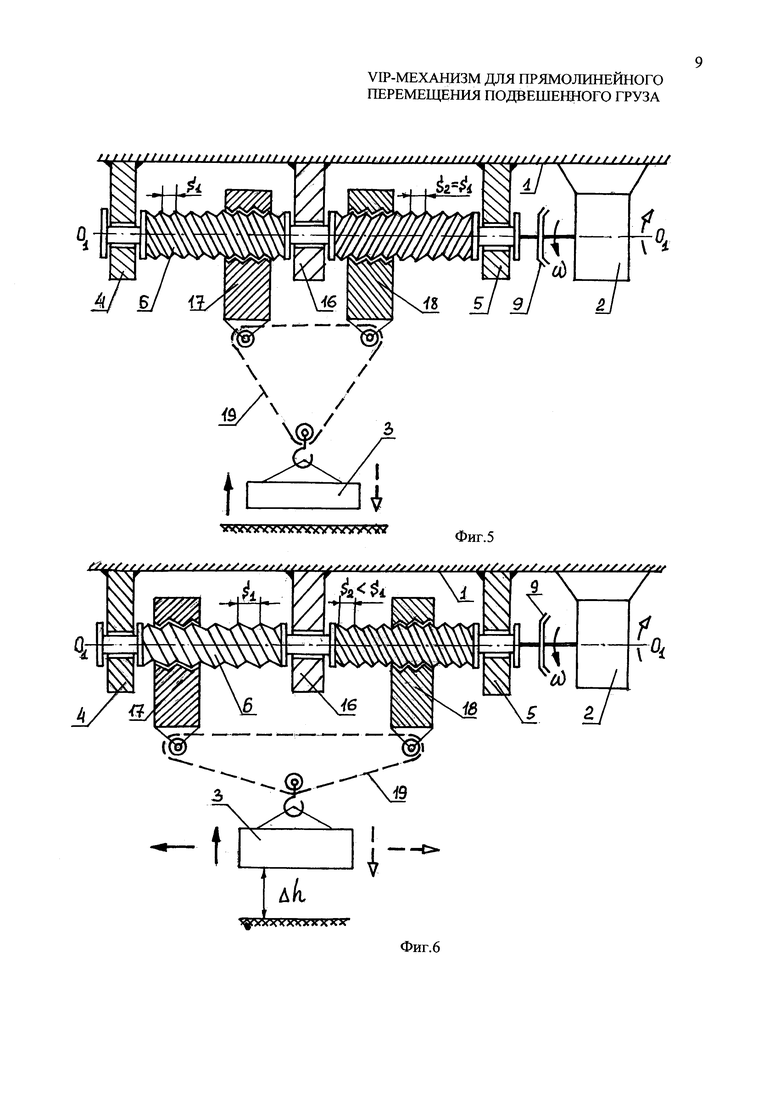
Сущность изобретения поясняется чертежами, где на фиг. 1 показан VIP-механизм для перемещения подвешенного груза по горизонтали, содержащий маятниковый балансир в виде одноплечего рычага, установленного на подвижном ходовом винте; на фиг. 2 показан VIP-механизм для перемещения подвешенного груза по горизонтали, содержащий маятниковый балансир в виде маятниковой подвесной рамы, установленной на ходовом винте, неподвижно закрепленном на основании посредством болтового соединения; на фиг. 3 показан VIP-механизм для перемещения подвешенного груза по горизонтали, содержащий маятниковый балансир в виде маятниковой подвесной рамы, установленной на ходовом винте, неподвижно закрепленном на основании посредством двухпозиционного стопора; на фиг. 4 показан VIP-механизм для одновременного встречного или попутного перемещения нескольких подвешенных грузов по горизонтали; на фиг. 5 показан VIP-механизм для перемещения подвешенного груза по вертикали путем его подъема и опускания; на фиг. 6 показан VIP-механизм для перемещения подвешенного груза по горизонтали с автоматическим подъемом и опусканием переносимого груза.
Данный VIP-механизм содержит основание 1, приводной двигатель 2, преобразующее устройство и подвесное устройство шарнирного присоединения переносимого груза 3. Преобразующее устройство выполнено в виде установленного на основании 1 в концевых опорах 4 и 5 ходового винта 6, а подвесное устройство шарнирного присоединения переносимого груза 3 выполнено в виде взаимодействующего с ходовым винтом 6 маятникового балансира, один конец маятникового балансира установлен с возможностью углового поворота относительно оси О1 ходового винта 6, а другой конец маятникового балансира шарнирно соединен с перемещаемым подвешенным грузом 3. Приводной двигатель 2 выполнен реверсивным и имеет кинематическую связь с преобразующим устройством. Маятниковый балансир VIP-механизма может быть выполнен в виде маятникового одноплечего рычага 7 или в виде маятниковой подвесной рамы 8.
Данный VIP-механизм с маятниковым балансиром в виде маятникового одноплечего рычага 7 представлен на фиг. 1 и содержит неподвижно установленный на основании 1 приводной двигатель 2, соединенный через муфту сцепления 9 с подвижным ходовым винтом 6, шарнирно установленным в опорах на основании 1 и кинематически связанным через резьбовое отверстие винтовой кинематической пары с маятниковым одноплечим рычагом 7, в котором на расстоянии l=O1O2 выполнено отверстие для шарнирного присоединения в точке O2 подвеса переносимого груза 3.
Данный VIP-механизм может быть выполнен с маятниковым балансиром в виде маятниковой подвесной рамы 8 (представлен на фиг. 2), где приводной двигатель 2 установлен на маятниковой подвесной раме 8, ходовой винт 6 закреплен в концевых опорах 4 и 5 на основании 1 (например, посредством болтового соединения 10 или двухпозиционного стопора 15). На неподвижном ходовом винте 6 установлена подвижная ходовая гайка 11, кинематически связанная с установленным на маятниковой подвесной раме 8 приводным двигателем 2 посредством ременной передачи 12 (например, в виде клиноременного вариатора). Ведущий шкив 13 ременной передачи 12 закреплен на валу установленного на маятниковой подвесной раме 8 приводного двигателя 2, а ведомый шкив 14 ременной передачи 12 сблокирован с расположенной на ходовом винте 6 ходовой гайкой 11.
Ходовой винт 6 данного VIP-механизма может быть снабжен установленной на основании 1 дополнительной промежуточной опорой 16 с расположенными по разные стороны от промежуточной опоры 16 участками резьбы, которые могут быть выполнены с одинаковой между собой или разной между собой по направлению резьбы или по величине шага (s) резьбой. Расположенные на ходовом винте 6 по разные стороны от промежуточной опоры 16 участки резьбы взаимодействуют с раздельно установленными на ходовом винте 6 маятниковыми одноплечими рычагами 17 и 18, кинематически связанными между собой и с переносимым грузом 3 посредством замкнутой гибкой связи 19, например, в виде троса или цепи.
Необходимое для устойчивой работы данного VIP-механизма при перемещении подвешенного груза 3 состояние равновесия маятникового балансира 7 представлено на фиг. 1 и определяется следующим соотношением между вращающим моментом М01 (от силы тяжести G переносимого груза 3 относительно оси О1 ходового винта 6) и моментом трения Мр в резьбовом соединении «ходовой винт-маятниковый балансир»:


и для предельного положения устойчивого равновесия маятникового балансира 7 (когда β=90°, sinβ=1) получаем следующее необходимое условие для выбора длины l маятникового балансира 7 (l=O1O2):

В выражениях (1), (2) и (3) обозначено: G - сила тяжести подвешенного груза 3; l=O1O2 - плечо подвеса переносимого груза на маятниковом балансире 7; r - средний радиус резьбы в резьбовом соединении «ходовой винт - маятниковый балансир»;  , FP - соответственно коэффициент трения и сила трения в резьбовом соединении «ходовой винт - маятниковый балансир»; β - угол равновесного отклонения от вертикали маятникового балансира с подвешенным грузом при его перемещении в требуемом прямолинейном направлении.
, FP - соответственно коэффициент трения и сила трения в резьбовом соединении «ходовой винт - маятниковый балансир»; β - угол равновесного отклонения от вертикали маятникового балансира с подвешенным грузом при его перемещении в требуемом прямолинейном направлении.
Показанную на фиг. 1 величину линейного сдвига от вертикали Δ точки O2 подвеса переносимого груза на маятниковом балансире 7 можно рассчитать по формуле:

и, например, для VIP-механизма с параметрами: r=0,05 м,  , l=0,5 м получаем:
, l=0,5 м получаем:
 м (т.е. всего 5 мм);
м (т.е. всего 5 мм);  .
.
Работа VIP-механизма заключается в следующем.
В представленной на фиг. 1 конструкции VIP-механизма при вращении вала приводного двигателя 2 и ходового винта 6 маятниковый балансир в виде одноплечего рычага 7 с параметрами (3) сохраняет свое устойчивое вертикальное положение (за счет действия на него силы тяжести G подвешенного груза) - в результате этого подвешенный груз 3 будет перемещаться по горизонтали со скоростью V0, рассчитываемой по следующей формуле: 
так как за каждый оборот nd приводного двигателя будет происходить точное перемещение маятникового балансира с подвешенным на нем грузом относительно станины на постоянную величину, равную шагу его резьбы s1. В формуле (2) обозначено: ω, nd - угловая скорость вращения и число оборотов в минуту приводного двигателя 2.
Например, при установке приводного двигателя с nd=1500 об/мин и выполнении резьбового отверстия одноплечего рычага 7 маятникового балансира с шагом s1=0,01 м (т.е. 10 мм), получаем требуемую нормативную [2, с. 103] скорость перемещения подвешенного груза 3 по горизонтали:
 ,
,
причем указанная малая величина V0 скорости перемещения подвешенного груза 3 по горизонтали достигается в данном VIP-механизме без применения традиционно устанавливаемого после двигателя сложного, дорогостоящего и крупногабаритного понижающего редуктора с большим передаточным отношением.
В представленном на фиг. 2 и 3 выполнении VIP-механизма с неподвижным ходовым винтом 6 и маятниковым балансиром в виде маятниковой подвесной рамы 8 с установленным на раму 8 приводным двигателем 2 следует для транспортирования подвешенного груза 3 замкнуть между собой ходовой вал 6 и основание 1 посредством болтового соединения 10 (схема на фиг. 2) или (в схеме на фиг. 3) путем сдвига вдоль оси ходового вала 6 двухпозиционного стопора 15 в положение I на фиг. 3 (в результате вал 6 станет неподвижным, а маятниковый балансир 7 с грузом 3 будет перемещаться вместе с ходовой гайкой 11 по горизонтали с заданной малой скоростью V0).
Для полной остановки подвешенного груза 3 на заданной высоте и в заданном рабочем положении вдоль траектории его перемещения (например, при работающем приводном двигателе 2) достаточно выключить установленную после двигателя муфту сцепления 9 (в схемах на фиг. 1, 2, 4, 5 и 6) или (в схеме на фиг. 3) разомкнуть двухпозиционный стопор 15 ходового вала 6 (в положение II в схеме на фиг. 3) - это приведет к совместному свободному вращению ходового вала 6 и ходовой гайки 11 и вызовет автоматическую остановку подвешенного груза 3 на заданной высоте и в заданном рабочем положении без применения в приводе каких-либо дополнительных тормозных устройств. Для перемещения подвешенного груза 3 с той же скоростью V0 в противоположном направлении достаточно выполнить реверсирование вращения двигателя 2.
Выполнение VIP-механизма с промежуточной опорой 16 ходового вала 6 (схема на фиг. 4), разделяющей его на расположенные по разные стороны от промежуточной опоры участки резьбы, каждый из которых взаимодействует с раздельно установленными на ходовом винте маятниковыми одноплечими рычагами, шарнирно соединенными с отдельными подвешенного грузами, может обеспечить от одного двигателя 2 согласованное встречное или попутное движение одновременно нескольких грузов.
Выполнение VIP-механизма с промежуточной опорой 16 ходового вала 6, разделяющей его на участки с разнонаправленной левой и правой резьбой одинакового шага s2=s1 (фиг. 5), обеспечивает при вращении ходового вала 6 подъем (или опускание при реверсировании двигателя 2) подвешенного груза 3 точно по вертикали (без его перемещения по горизонтали). Выполнение VIP-механизма с промежуточной опорой 16 ходового вала 6, разделяющей его на участки с однонаправленной (левой или правой) резьбой при разном между собой шаге резьбы на этих участках (например, схема на фиг. 6, где s2<s1), обеспечивает при вращении ходового вала 6 перемещение подвешенного груза 3 по горизонтали совместно с автоматическим подъемом (или опусканием при реверсировании двигателя 2) подвешенного груза 3 по вертикали на величину Δh (см. фиг. 6).
Достигаемый в данном VIP-механизме технический результат будет следующий:
1) Упрощение конструкции, снижение веса и габаритов механизма за счет обеспечения точного прямолинейного перемещения подвешенного груза с малыми скоростями без применения в приводе сложного понижающего редуктора с большим передаточным отношением и низким к.п.д., а также за счет надежного удержания подвешенного груза на заданной высоте без применения в приводе тормозных устройств.
2) Выполнение VIP-механизма с открытой кинематической цепью в виде маятникового балансира не требует высокой точности изготовления и сборки (как в механизмах с замкнутой кинематической цепью), что снижает стоимость его изготовления.
3) Данный VIP-механизм обеспечивает перемещение подвешенного груза с малой скоростью транспортирования, а также обеспечивает согласованное между собой встречное или попутное перемещение одновременно нескольких подвешенных грузов.
4) Обеспечение перемещения подвешенного груза точно по горизонтали исключает перегрузку приводного двигателя и снижает динамические нагрузки на привод.
5) Для остановки и фиксации подвешенного груза в заданном рабочем положении (например, при остановленном двигателе) не требуется применение каких-либо тормозных устройств, что упрощает систему управления и повышает безопасность работы.
6) Малые габариты и вес данного VIP-механизма расширяют области его применения для привода рабочих органов в малогабаритных роботах-манипуляторах.
Источники информации
1. Словарь-справочник по механизмам (издание 2) / А.Ф. Крайнев. - М.: Машиностроение, 1987. - С. 356, рисунок б) - аналог.
2. Техника безопасности при перемещении грузов на машиностроительных предприятиях / А.Г. Лысяков. - М.: Машиностроение, 1982. - С. 103.
3. Енчев К.Ц., Стойков С.Б. Совмещение экстремального и оптимизационного синтеза при проектировании направляющего механизма портального крана. // Теория механизмов и машин, №2(12), 2008. Том 6. - Изд-во СПбГПУ. - С. 41, рис. 4; с. 43, рис. 5 (http:tmm.spbstu.ru) - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| VIP-ЛЕБЕДКА ДЛЯ ПЕРЕМЕЩЕНИЯ ГРУЗА | 2011 |
|
RU2478558C1 |
| СКЛАДЫВАЮЩИЙСЯ ШАРНИРНЫЙ ПОДЪЕМНИК ПОДВЕСНОГО ГРУЗА | 2021 |
|
RU2770954C1 |
| VIP-ТРИБОМЕТР ДЛЯ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК ТРЕНИЯ ГИБКИХ ТЕЛ | 2011 |
|
RU2486493C2 |
| ПЛОСКО-ПРОСТРАНСТВЕННЫЙ ТРЕХПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР | 2021 |
|
RU2774279C1 |
| ГРУЗОПОДЪЕМНЫЙ МАНИПУЛЯТОР | 2020 |
|
RU2737012C1 |
| ПАРАЛЛЕЛОГРАММНЫЙ ПРЯМОЛИНЕЙНО-НАПРАВЛЯЮЩИЙ МЕХАНИЗМ | 2021 |
|
RU2769002C1 |
| СКЛАДЫВАЮЩИЙСЯ ГРУЗОПОДЪЕМНЫЙ МАНИПУЛЯТОР ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ | 2021 |
|
RU2780824C1 |
| ГРУЗОПОДЪЕМНЫЙ МАНИПУЛЯТОР | 2019 |
|
RU2728851C1 |
| ШАРНИРНЫЙ ВИБРОУДАРНЫЙ МЕХАНИЗМ | 2022 |
|
RU2783900C1 |
| ПЛАТФОРМЕННЫЙ РОБОТ | 2020 |
|
RU2751778C1 |
Изобретение относится к подъемно-транспортным устройствам для перемещения подвешенных грузов в горизонтальной и вертикальной плоскостях. Механизм для прямолинейного перемещения подвешенного груза содержит основание, преобразующее устройство и подвесное устройство шарнирного присоединения переносимого груза. Преобразующее устройство выполнено в виде установленного на основании ходового винта, кинематически связанного с подвесным устройством. Подвесное устройство шарнирного присоединения переносимого груза выполнено в виде взаимодействующего с ходовым винтом маятникового балансира, представляющего собой маятниковый одноплечий рычаг, на одном конце которого выполнено резьбовое отверстие винтовой кинематической пары для установки в него ходового винта, на другом конце маятникового одноплечего рычага расположено отверстие для шарнирного присоединения переносимого груза. Достигается упрощение конструкции, снижение габаритов и веса привода, обеспечение точного перемещения груза по горизонтали с малыми скоростями без применения понижающего редуктора с большим передаточным отношением, а также надежное удержание переносимого груза на заданной высоте без применения сложных тормозных устройств. 5 з.п. ф-лы, 6 ил.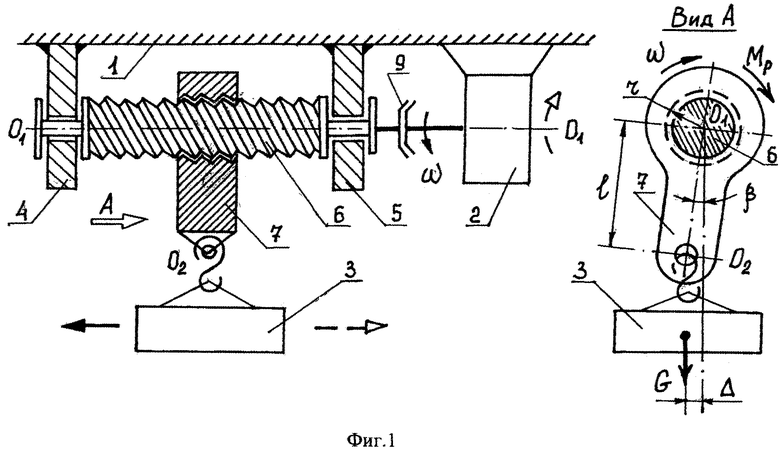
1. Механизм для прямолинейного перемещения подвешенного груза, содержащий основание, приводной двигатель, преобразующее устройство и подвесное устройство шарнирного присоединения переносимого груза, отличающийся тем, что преобразующее устройство выполнено в виде установленного в концевых опорах на основании ходового винта, подвесное устройство шарнирного присоединения переносимого груза выполнено в виде взаимодействующего с ходовым винтом маятникового балансира, один конец маятникового балансира установлен с возможностью углового поворота относительно оси ходового винта, другой конец маятникового балансира шарнирно соединен с перемещаемым подвешенным грузом, а приводной двигатель выполнен реверсивным и кинематически связан с преобразующим устройством.
2. Механизм по п.1, отличающийся тем, что ходовой винт подвижно установлен в концевых опорах с возможностью углового поворота, приводной двигатель неподвижно установлен на основании и кинематически связан, например, через муфту сцепления с подвижным ходовым винтом, а маятниковый балансир выполнен в виде маятникового одноплечего рычага, на одном конце которого выполнено резьбовое отверстие винтовой кинематической пары для установки в него ходового винта, на другом конце маятникового одноплечего рычага расположено отверстие для шарнирного присоединения переносимого груза, выполненное на расстоянии l от оси ходового винта, равном:
l>fр·r,
где l - расстояние от оси ходового винта до точки подвеса на маятниковом балансире переносимого груза; fр - коэффициент трения в резьбовом соединении маятникового одноплечего рычага с ходовым винтом; r - средний радиус резьбы в резьбовом соединении маятникового одноплечего рычага с ходовым винтом.
3. Механизм по п.1, отличающийся тем, что маятниковый балансир выполнен в виде маятниковой подвесной рамы, приводной двигатель установлен на маятниковой подвесной раме, ходовой винт неподвижно закреплен в концевых опорах на основании посредством стопорного устройства, выполненного, например, в виде болтового соединения или двухпозиционного стопора, а на ходовом винте установлена подвижная ходовая гайка, кинематически связанная с установленным на маятниковой подвесной раме приводным двигателем посредством, например, ременной передачи, в которой ведущий шкив закреплен на валу установленного на маятниковой подвесной раме приводного двигателя, а ведомый шкив сблокирован с установленной на ходовом винте ходовой гайкой.
4. Механизм по п.2, отличающийся тем, что ходовой винт снабжен установленной на основании дополнительной промежуточной опорой и выполнен с расположенными по разные стороны от промежуточной опоры участками резьбы, каждый из которых взаимодействует с раздельно установленными на ходовом винте маятниковыми одноплечими рычагами, шарнирно соединенными с отдельными подвешенными грузами.
5. Механизм по п.2, отличающийся тем, что ходовой винт снабжен установленной на основании дополнительной промежуточной опорой и выполнен с расположенными по разные стороны от промежуточной опоры участками резьбы, каждый из которых взаимодействует с раздельно установленными на ходовом винте маятниковыми одноплечими рычагами, кинематически связанными между собой и с подвешенным грузом посредством замкнутой гибкой связи, например, в виде троса или цепи.
6. Механизм по п.5, отличающийся тем, что расположенные по разные стороны от промежуточной опоры участки резьбы ходового винта могут быть выполнены с одинаковым или с различным направлением витков резьбы, а также оба участка резьбы ходового винта могут быть выполнены между собой с одинаковым или с разным шагом резьбы.
| US 3545629 A1, 08.12.1970 | |||
| US 4199133 A1, 22.04.1980 | |||
| Траверса | 1988 |
|
SU1618723A1 |

