Изобретение относится к области бортового оборудования, предназначенного для установки на летательные аппараты (ЛА), оборудованные бортовыми радиолокационными станциями (РЛС), и может быть использования для осуществления поддержки членов экипажей ЛА при принятии им решений по обходу очагов грозовой деятельности.
Известен способ интеллектуальной поддержки деятельности экипажа летательного аппарата [1], заключающийся в измерении полетной информации, вводе ее в вычислительный комплекс и обработке по программе, осуществляющей анализ измеренной полетной информации, и при возникновении особого случая полета предъявлении на дисплее информации в виде пиктографических знаков о последовательности необходимых операций экипажа по парированию особого случая полета.
Недостатком известного способа является отсутствие возможности участия членов экипажа в процессе принятия решений по выбору способа парирования особого случая полета.
Известна интеллектуальная система поддержки экипажа [2], содержащая датчики состояния двигателей, топливной системы, гидросистемы, системы электроснабжения, системы выпуска шасси и торможения, противообледенительной системы, противопожарной системы, системы воздушных сигналов, спутниковую навигационную систему, инерциальную навигационную систему, радиовысотомер, приборную систему посадки, систему штурвального управления, систему сбора бортовой информации, систему отображения информации, блок распознавания аварийных ситуаций, систему контроля разбега, систему предупреждения об опасной близости земли, систему предупреждения о выходе на опасные значения угла атаки и перегрузки, систему контроля захода на посадку и посадки, систему предупреждения о попадании в сдвиг ветра, систему выбора режима торможения с возможностью определения прогнозируемого тормозного пути и обеспечивающая безопасность посадки летательного аппарата за счет адаптации системы торможения к условиям посадки.
Однако данная система не позволяет повысить уровень безопасности полетов ЛА при возникновении ситуаций, связанных с необходимостью обхода зон грозовой деятельности, за счет отсутствия в ее составе систем радиолокационного обнаружения зон грозовой деятельности и сильных ливневых осадков.
Известен способ интеллектуальной поддержки экипажа летательного аппарата при выполнении им этапа полета [3], основанный на передаче данных от бортовых измерительных систем в блок обработки данных, сравнении полученных данных с информацией в базе данных типовых ситуаций, формированием рекомендации экипажу. При возникновении внештатной ситуации формируют ситуационный вектор, по которому в блоке подбора метода решения осуществляют расчет параметров проблемной субситуации определенным образом, формируют и передают рекомендации экипажу на информационно-управляющее поле.
Недостатком данного способа являются:
- отсутствие диалога с оператором, пожелания которого не учитываются при формировании рекомендаций экипажу;
- отсутствие сигнализации экипажу, если он не предпринимает действий по урегулированию нештатной ситуации на основе сформированных и переданных рекомендаций.
Технический результат, на достижение которого направлено предлагаемое изобретение, заключается в поддержки членов экипажей ЛА при выборе оптимального маршрута обхода зон грозовой деятельности, который позволяет обеспечить безопасность ЛА от связанных с грозой опасных метеоявлений и приемлемый уровень экономичности с точки зрения расхода топлива.
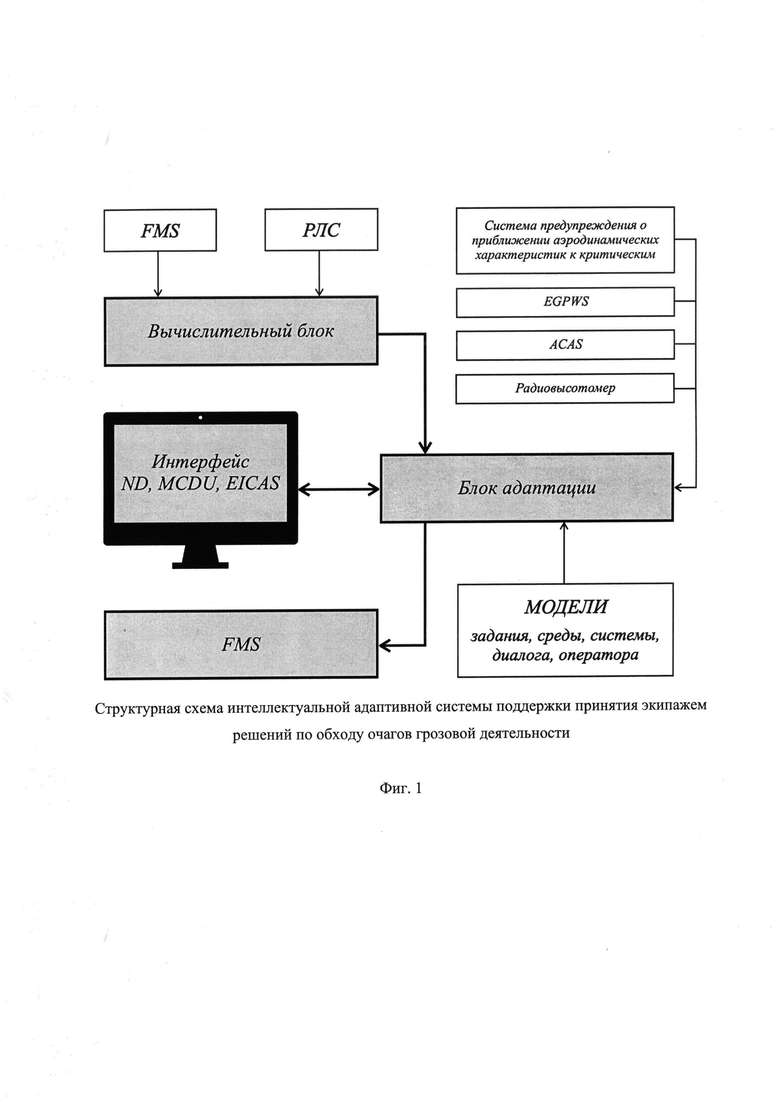
Для достижения технического результата интеллектуальная адаптивная система поддержки принятия решений экипажем включает модель задания, модель среды, модель системы, модель диалога, модель оператора, блок адаптации, вычислительный блок, систему управления полетом (FMS), бортовую радиолокационную станцию (РЛС), систему предупреждения о приближении аэродинамических характеристик к критическим значениям, систему предупреждения о близости земли (EGPWS), систему предотвращения столкновений ЛА в воздухе (ACAS), радиовысотомер, навигационный дисплей (ND), многофункциональное устройство контроля и индикации (MCDU), систему сигнализации параметров работы двигателя и предупреждения об отказах (EICAS).
На фиг. 1 приведена структурная схема интеллектуальной адаптивной системы поддержки принятия экипажем решений по обходу очагов грозовой деятельности.
Модели задания, среды, системы, диалога и оператора представляют собой базу данных системы, определяющую порядок ее работы и взаимодействия с оператором.
Модель задания включает в себя составной сценарий миссии системы по обходу грозового очага. Составной сценарий миссии состоит из следующих последовательных этапов выполнения обхода зоны грозовой деятельности:
1. ЛА выполняет полет в условиях грозовой деятельности, а расчетная траектория его полета пересекает грозовой очаг или находится на небезопасно близком расстоянии от границы грозового очага;
2. Интеллектуальной адаптивной системой (ИАС) фиксируется наличие грозовых очагов на расчетной траектории полета ЛА, определяются альтернативные варианты их обхода в горизонтальной плоскости, выбирается оптимальный с точки зрения безопасности и экономической эффективности способ обхода, который выдается оператору в виде оптимальной траектории обхода на ND;
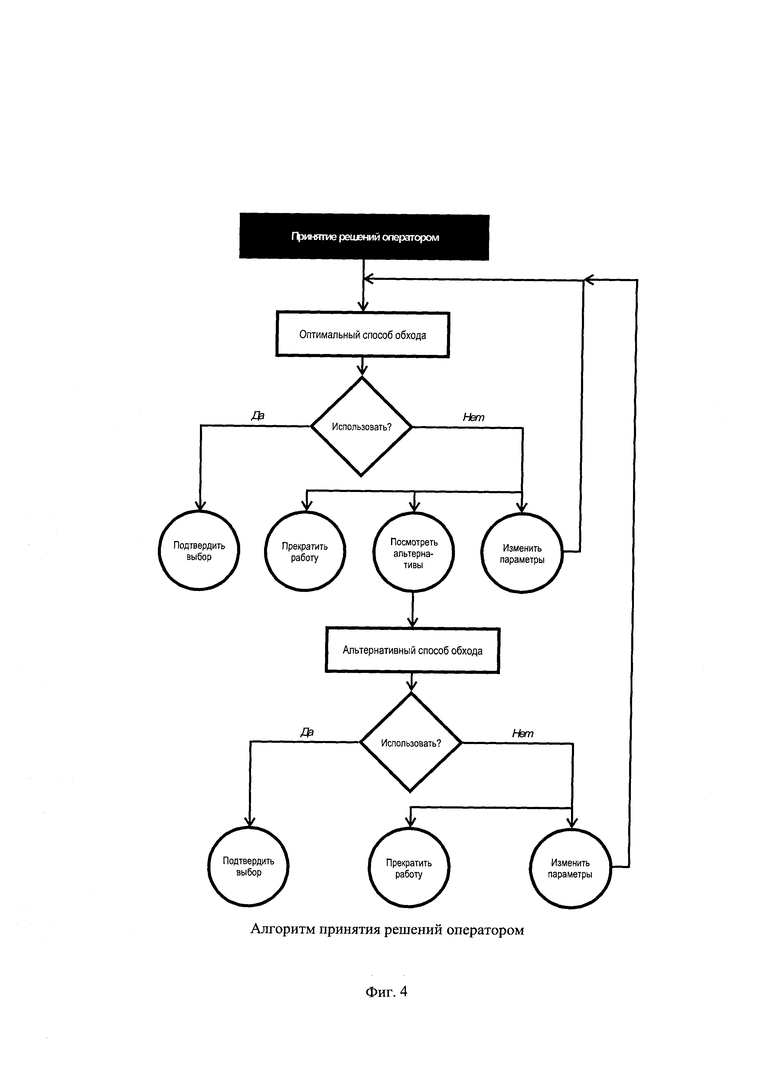
3. Оператор оценивает предложенный способ обхода, и действует в соответствии с алгоритмом принятия решений оператором;
4. В случае подтверждения предложенного оператором способа обхода вносится информацию по изменению траектории полета в FMS, осле чего ИАС переходит в режим поиска новых грозовых очагов по траектории полета;
5. Экипаж информируется о начале выполнения маневра обхода грозового очага за установленное время до отклонения ЛА от расчетной траектории полета;
6. После завершения маневра обхода и выхода ЛА на расчетную траекторию полета экипаж информируется об успешном выполнении обхода грозового очага.
Модель среды формируется во время выполнения полета на основе данных, полученных от бортовой РЛС о конфигурации и расположении грозовых очагов в районе полета ЛА.
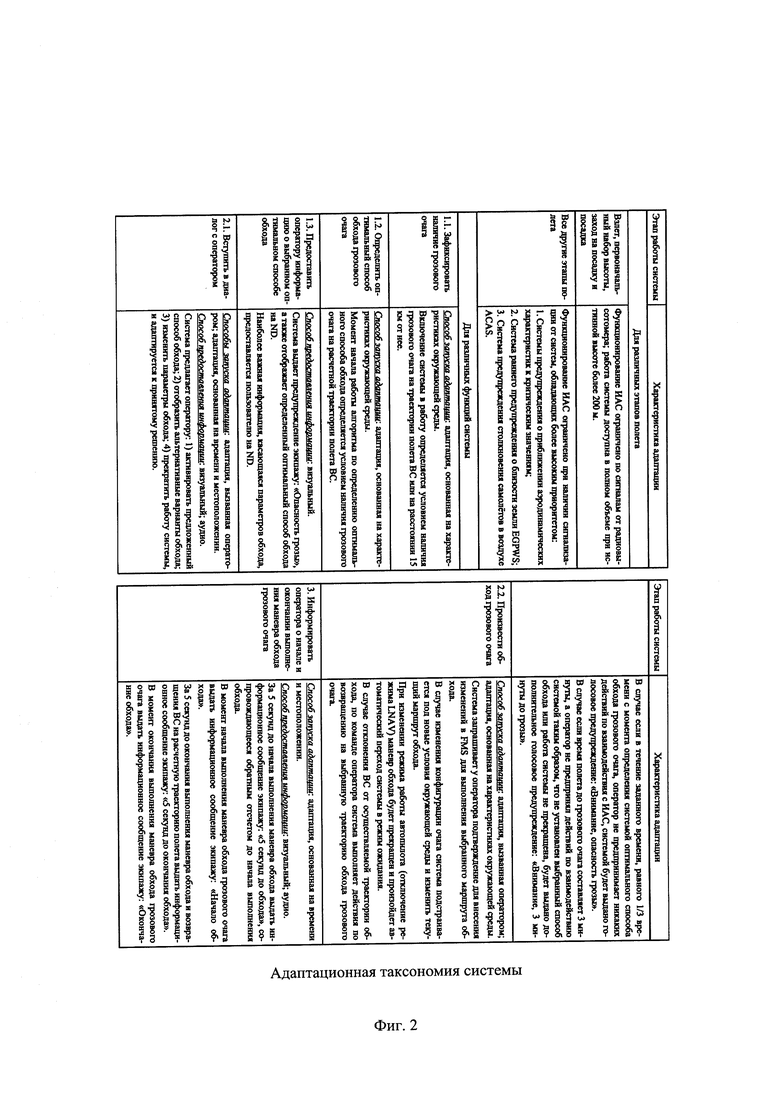
Модель системы включает в себя адаптационную таксономию, в которой систематизированы условия и способы адаптации ИАС к внешним и внутренним условиям. На фиг. 2 приведена адаптационная таксономия интеллектуальной адаптивной системы поддержки принятия экипажем решений по обходу очагов грозовой деятельности: для каждого этапа функционирования системы указываются использующиеся на нем способы запуска адаптации, способы предоставления информации оператору, а также действия, выполняемые системой для осуществления адаптации.
Адаптация системы на различных этапах полета осуществляется следущим образом:
1. Функционирование ИАС ограничено по сигналам от радиовысотомера; работа системы доступна в полном объеме при истинной высоте более 200 м;
2. Функционирование ИАС ограничено при наличии сигнализации от систем: 1) предупреждения о приближении аэродинамических характеристик к критическим значениям; 2) раннего предупреждения близости земли EGPWS; 3) предупреждения столкновения самолетов в воздухе ACAS, обладающих более высоким по сравнению с ИАС приоритетом;
3. Включение системы в работу определяется условием наличия грозового очага на траектории полета ЛА или на расстоянии 15 км от нее;
4. Момент начала работы алгоритма по определению оптимального способа обхода определяется условием наличия грозового очага на расчетной траектории полета ЛА или на расстоянии 15 км от нее;
5. При обнаружении грозового очага на расчетной траектории полета ЛА или на расстоянии 15 км от нее экипажу выдается предупреждение «Опасность грозы», а также отображается оптимальный способ обхода на навигационном дисплее;
6. При изменении режима работы автопилота маневр обхода прекращается, после чего происходит автоматический переход системы в режим ожидания;
7. В случае отклонения ЛА от осуществляемой траектории обхода по команде оператора выполняются действия по возвращению на выбранную траекторию обхода грозового очага.
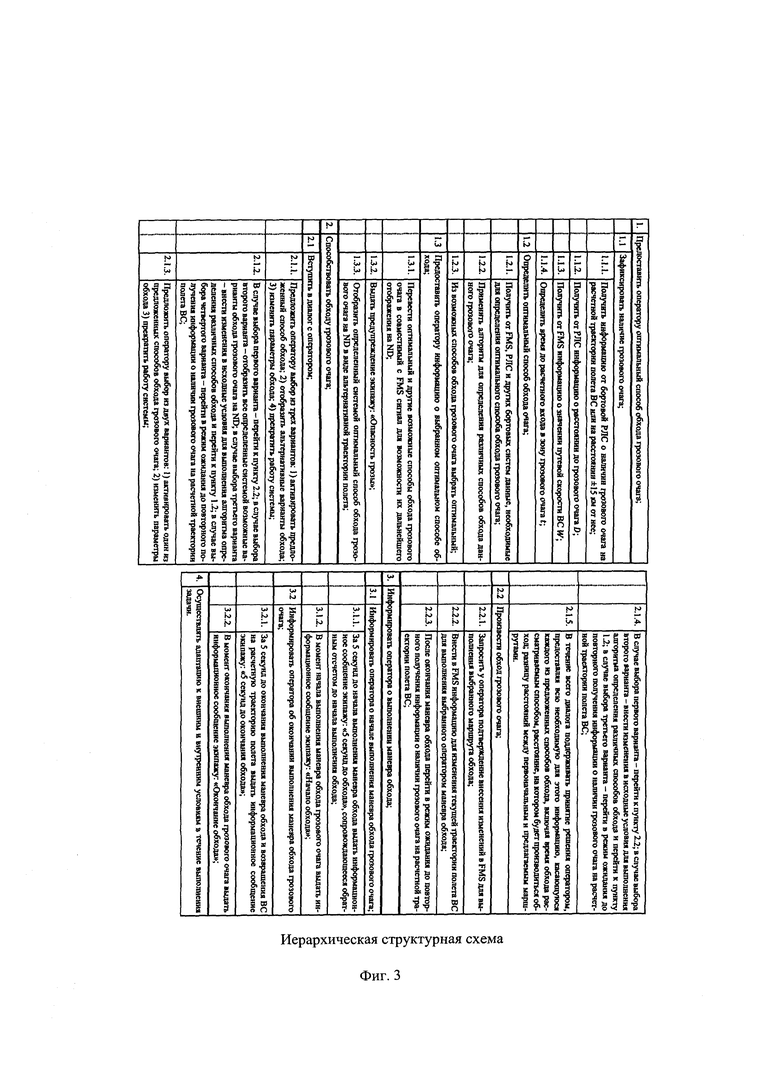
Модель диалога включает в себя иерархическую структурную схему интеллектуальной системы. На фиг. 3 приведена иерархическая структурная схема интеллектуальной адаптивной системы поддержки принятия экипажем решений по обходу очагов грозовой деятельности, содержащая функции, выполняемые системой для оказания поддержки экипажу.
Модель оператора включает в себя алгоритм принятия решений оператором, определяющий основные этапы взаимодействия оператора и системы. На фиг. 4 приведен алгоритм принятия решений оператором.
В вычислительном блоке системы осуществляется вычисление координат точек пути оптимального маршрута обхода грозового очага, для чего он связан с FMS и РЛС для получения информации о путевой скорости ЛА, расчетной траектории полета и расположении грозовых очагов по маршруту полета.
В блоке адаптации осуществляется адаптация системы к внешним и внутренним условиям согласно адаптационной таксономии, для чего он связан с необходимыми для выполнения этой задачи моделями. Кроме того, он связан с вычислительным блоком и интерфейсом системы, обеспечивая адаптивный способ предоставления информации экипажу. Системы: 1) предупреждения о приближении аэродинамических характеристик к критическим значениями; 2) EGPWS; 3) ACAS, а также радиовысотомер связаны с блоком адаптации для ограничения функционирования ИАС при наличии сигнализаций от указанных систем с более высоким приоритетом, а также во время этапов взлета и посадки с целью уменьшения рабочей нагрузки на экипаж.
Взаимодействие экипажа с системой осуществляется с помощью интерфейса, включающего в себя:
1. ND, на котором экипажу предоставляется визуальная информация о расположении грозовых очагов, а также предлагаемых маршрутов обхода;
2. MCDU, с помощью которого оператор осуществляет ввод необходимой информации, выбор некоторого из предлагаемых маршрутов и иные виды взаимодействия с системой;
3. EICAS, выдающая визуальные предупреждения членам экипажа об опасности приближающегося грозового очага, а также информирующая их о ходе выполнения маневра обхода.
С помощью интерфейса оператор выбирает маршрут обхода грозового очага, после чего информация о его выборе передается в блок адаптации для осуществления последующей адаптации системы во время обхода; из блока адаптации координаты точек, задающих маршрут обхода, предаются в FMS для внесения изменений в текущий маршрут полета.
Порядок взаимодействия пользователя с ИАС состоит из этапов 1) предполетной настройки; 2) выбора способа обхода; 3) осуществления обхода.
При работе с системой оператору предлагается выбор из следующих возможных способов выхода на маршрут обхода грозового очага и возврата на первоначальную траекторию после завершения обхода:
1. Выход на маршрут обхода из точки, соответствующей текущему местоположения ЛА, являющийся наиболее экономичным: в случае выбора этого способа выхода после активации системы ЛА следует сразу в ту из задающих маршрут точек, которой соответствует наименьший (при обходе справа) или наибольший (при обходе слева) полярный угол полярной системы координат, связанной с ЛА. Возврат на расчетную траекторию полета в этом случае будет выполнен сразу в точку, соответствующую следующему поворотному пункту маршрута. Достоинство этого способа заключается в том, что он является наиболее экономичным, однако его применение может привести к тому, что произойдет слишком раннее отклонение ЛА от первоначальной траектории полета и, как следствие, выход самолета за пределы границ воздушной трассы;
2. Выход на маршрут обхода под заданным углом, реализация которого осуществляется следующим образом: определяется задающая маршрут точка, которой соответствует наименьший (при обходе справа) или наибольший (при обходе слева) полярный угол, после чего оператору предлагается ввести угол α, под которым будет осуществлен выход на данную точку. Возврат на первоначальную траекторию полета осуществляется аналогично под углом, заданным оператором
На этапе предполетной настройки системы оператор, используя отведенную для этого страницу MCDU, осуществляет:
1. Выбор предпочтительных способов для выхода на маршрут обхода и возврата на расчетную траекторию полета, - с выходом на маршрут обхода из точки, соответствующей текущему местоположению ЛА, или с выходом на маршрут обхода под заданным углом; с возвратом на расчетную траекторию путем выхода на следующий поворотный пункт маршрута или с возвратом на расчетную траекторию под заданным углом;
2. Ввод угла α, под которым будет осуществляться выход на маршрут обхода и возврат на расчетную траекторию полета под заданным углом;
3. Ввод расстояния от границы грозового очага, на котором будет осуществляться обход;
4. Ввод минимального расстояния между границами соседних грозовых очагов для безопасного пролета между ними.
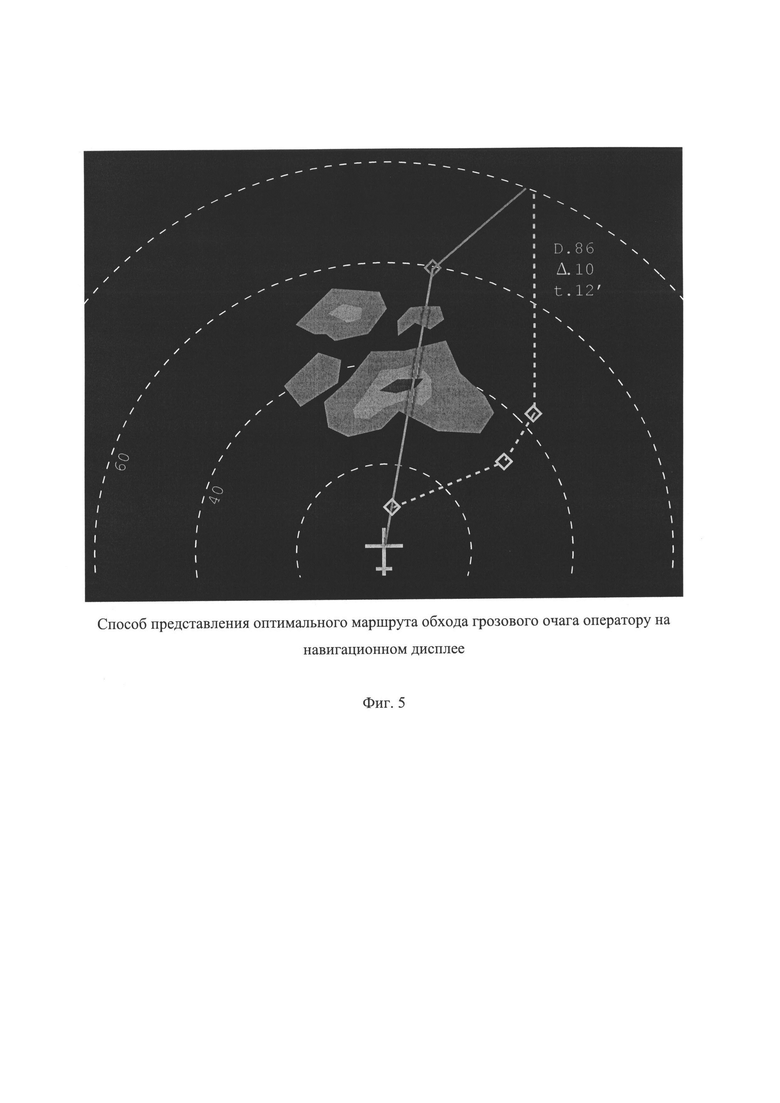
После фиксации наличия на расчетной траектории полета ЛА грозового очага, представляющего опасность для полета, и определения оптимального маршрута обхода, информация о нем предоставляется оператору. На фиг. 5 представлен способ представления оптимального способа обхода грозового очага оператору на навигационном дисплее: предложенный маршрут обхода представлен в виде бирюзового пунктира и точек, которыми он задается. Возле предлагаемого маршрута обхода представлены его основные характеристики: 1) длина маршрута D; 2) время, затрачиваемое на осуществление обхода t; 3) разница длин маршрута обхода и расчетной траектории Δ.
После предоставления данной информации оператору предлагается с помощью MCDU выбрать один из вариантов: 1) активировать предложенный способ обхода; 2) отобразить альтернативные варианты обхода; 3) изменить параметры обхода; 4) прекратить работу системы.
Для активации предложенного способа обхода необходимо нажать на соответствующую кнопку MCDU. В случае если оператор не будет удовлетворен предложенным системой оптимальным способом обхода грозового очага, с помощью кнопок MCDU он сможет последовательно просмотреть и активировать следующие варианты выхода на маршрут обхода:
1. Оптимальный способ выхода из точки, соответствующей текущему местоположению ЛА, для обхода зоны грозовой деятельности справа или слева;
2. Оптимальный способ выход на маршрут обхода под заданным углом для обхода зоны грозовой деятельности справа и слева.
После для выбранного способа выхода на траекторию обхода необходимо последовательно просмотреть и активировать один из следующих вариантов возврата на расчетную траекторию полета:
1. Оптимальный способ возврата выходом на следующий поворотный пункт маршрута;
2. Оптимальный способ возврата на расчетную траекторию под заданным углом.
Изменение параметров обхода осуществляется аналогично тому, как производилась предполетная настройка системы: оператор может ввести предпочтительный способ обхода, значение угла α, расстояние до границы грозового очага и минимальное расстояние между соседними засветками для осуществления обхода между ними, после чего производятся перерасчет оптимального способа обхода и отображение его на ND.
После выбора оператором способа обхода расчетная траектория полета изменяется путем внесения координат точек, задающих маршрут обхода грозового очага, в FMS.
В тех случаях, когда оператор не предпринял действия по взаимодействию с системой при наличии на расчетной траектории полета грозового очага, угрожающего безопасности полета, экипажу будут выданы следующие предупреждения:
1. Если в течение заданного времени, равного 1/3 времени с момента определения системой оптимального способа обхода грозового очага, оператор не предпринимает никаких действий по взаимодействия с ИАС, выдается голосовое предупреждение: «Внимание, опасность грозы»;
2. Если время полета до грозового очага составляет 3 минуты, а оператор не предпринял действий по взаимодействию системой таким образом, что не установлен выбранный способ обхода или работа системы не прекращена, выдается дополнительное голосовое предупреждение: «Внимание, 3 минуты до грозы».
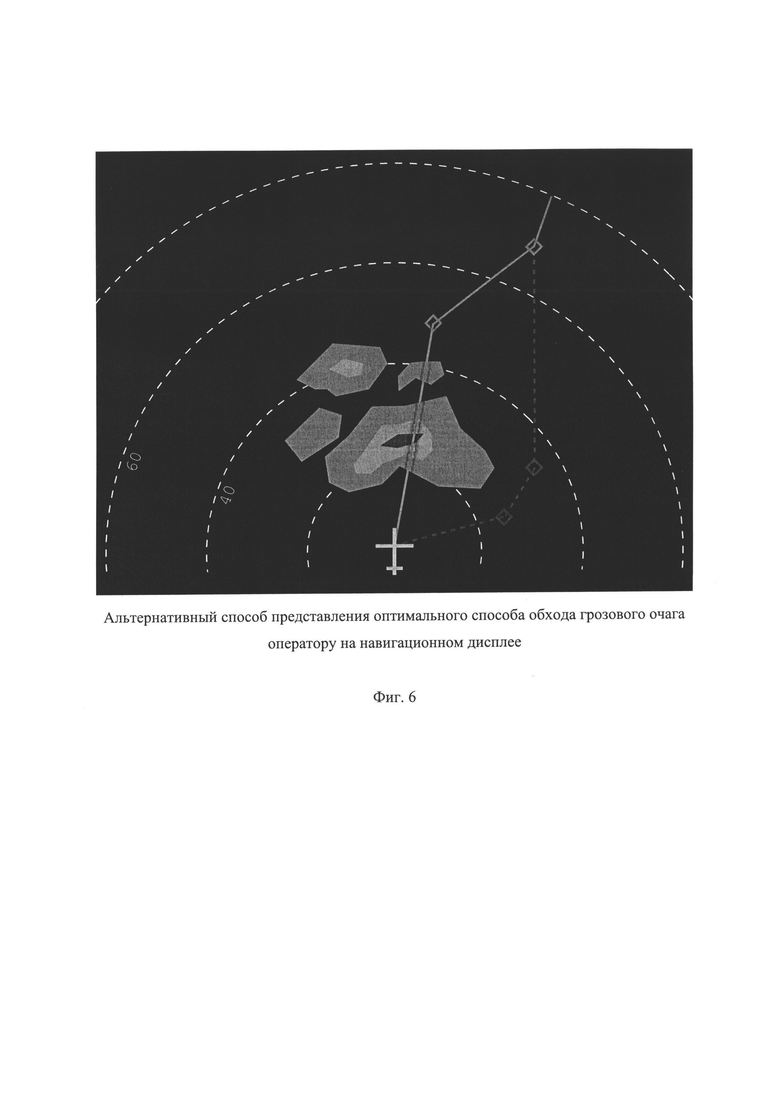
В обоих случаях произойдет адаптация отображаемой экипажу информации следующим образом:
1. Маршрут, соответствующий оптимальному из оставшихся возможных способов обхода, отображается на ND красным цветом и мигает;
2. Дополнительные характеристики маршрута (D, t и Δ) не отображаются с целью сократить время обработки информации оператором;
3. На дисплее EICAS отображаются указанные информационные сообщения.
На фиг. 6 представлен адаптированный способ предоставления оптимального способа обхода грозового очага оператору на навигационном дисплее.
Во время осуществления обхода оператор информируется о начале и окончании обхода:
1. За 5 секунд до начала выполнения маневра обхода выдается информационное сообщение экипажу: «5 секунд до обхода», сопровождающееся обратным отсчетом до начала выполнения обхода;
2. В момент начала выполнения маневра обхода грозового очага выдается информационное сообщение экипажу: «Начало обхода»;
3. За 5 секунд до окончания выполнения маневра обхода и возвращения ЛА на расчетную траекторию полета выдается информационное сообщение экипажу: «5 секунд до окончания обхода»;
4. В момент окончания выполнения маневра обхода грозового очага выдается информационное сообщение экипажу: «Окончание обхода».
Данные информационные сообщения отображаются на дисплее EICAS.
Изобретение представляет собой интеллектуальную адаптивную систему поддержки принятия экипажем ЛА решений по обходу очагов грозовой деятельности, обеспечивающую поддержку членов экипажей ЛА при выборе оптимального маршрута обхода зон грозовой деятельности, который позволяет обеспечить безопасность ЛА от связанных с грозой опасных метеоявлений и приемлемый уровень экономичности с точки зрения расхода топлива.
Источники информации:
1. Патент РФ №2018966, G08B 23/00, Гончаров А.В., Проскурянов Н.В., Можаев А.А.
2. Патент РФ №2598130, G05D 1/00, Ефанов В.В.
3. Патент РФ №2751377, B64D 45/00, Федунов Б.Е., Юневич Н.Д., Пляцовой А.А.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ОПТИМАЛЬНОГО МАРШРУТА ОБХОДА ЛЕТАТЕЛЬНЫМ АППАРАТОМ ЗОН ГРОЗОВОЙ ДЕЯТЕЛЬНОСТИ И ЛИВНЕВЫХ ОСАДКОВ | 2023 |
|
RU2798628C1 |
| КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ ВЕРТОЛЕТА НА ОСНОВЕ ИНТЕГРИРОВАННОЙ МОДУЛЬНОЙ АВИОНИКИ | 2015 |
|
RU2605222C1 |
| Способ интеллектуальной поддержки экипажа | 2020 |
|
RU2767406C1 |
| БОРТОВАЯ ИНТЕГРИРОВАННАЯ СИСТЕМА ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ ЭКИПАЖА И КОГНИТИВНЫЙ ФОРМАТ ПРЕДСТАВЛЕНИЯ ПОЛЕТНОЙ ИНФОРМАЦИИ НА ЭТАПЕ "ВЗЛЕТ" МНОГОДВИГАТЕЛЬНОГО ВОЗДУШНОГО СУДНА | 2013 |
|
RU2550887C2 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2015 |
|
RU2598130C1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2013 |
|
RU2541902C2 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ПОЛЕТОВ ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2008 |
|
RU2370416C1 |
| СПОСОБ АДАПТИВНО-МАРШРУТНОГО УПРАВЛЕНИЯ ПИЛОТИРУЕМЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2013 |
|
RU2568161C2 |
| Интеллектуальная система поддержки экипажа летательного аппарата | 2024 |
|
RU2839176C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ УГРОЗЫ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С ПРЕПЯТСТВИЯМИ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ | 2007 |
|
RU2356099C1 |
Интеллектуальная адаптивная система поддержки принятия экипажем ЛА решений по обходу очагов грозовой деятельности содержит модель задания, модель среды, модель системы, модель диалога, модель оператора, блок адаптации, вычислительный блок, систему управления полетом (FMS), бортовую радиолокационную станцию (РЛС), систему предупреждения о приближении аэродинамических характеристик к критическим значениям, систему предупреждения о близости земли (EGPWS), систему предотвращения столкновений ЛА в воздухе (ACAS), радиовысотомер, навигационный дисплей (ND), многофункциональное устройство контроля и индикации (MCDU), систему сигнализации параметров работы двигателя и предупреждения об отказах (EICAS), выполненную с возможностью фиксировать наличие грозового очага на траектории полета ЛА, предложить варианты обхода, информировать о начале и окончании маневра обхода, переходить в режим ожидания при наличии сигнализаций от систем предупреждения. Обеспечивается повышение безопасности ЛА от связанных с грозой опасных метеоявлений и приемлемый уровень экономичности с точки зрения расхода топлива, снижение нагрузки на экипаж ЛА. 6 ил.
Интеллектуальная адаптивная система поддержки принятия экипажем ЛА решений по обходу очагов грозовой деятельности, включающая модель задания, модель среды, модель системы, модель диалога, модель оператора, блок адаптации, вычислительный блок, систему управления полетом (FMS), бортовую радиолокационную станцию (РЛС), систему предупреждения о приближении аэродинамических характеристик к критическим значениям, систему предупреждения о близости земли (EGPWS), систему предотвращения столкновений ЛА в воздухе (ACAS), радиовысотомер, навигационный дисплей (ND), многофункциональное устройство контроля и индикации (MCDU), систему сигнализации параметров работы двигателя и предупреждения об отказах (EICAS), фиксирующая наличие грозового очага на траектории полета летательного аппарата или на расстоянии 15 км от нее, определяющая на основе предполетной настройки оптимальный и альтернативные способы обхода грозового очага, выдающая оператору информацию о предлагаемом оптимальной способе обхода грозового очага на навигационном дисплее в виде альтернативной траектории полета, предлагающая оператору активировать предложенный способ, отобразить альтернативные варианты обхода, изменить параметры обхода или прекратить работу системы, вносящая информацию по изменению траектории полета в систему управления полетом (FMS) в виде координат задающих маршрут обхода грозового очага точек пути, предупреждающая экипаж об опасности грозы в случае отсутствия с его стороны действия по взаимодействию с системой при условии обнаружения ей грозового очага на траектории полета или на расстоянии 15 км от нее и модифицирующая в этом случае способ предоставления экипажу информации на навигационном дисплее, информирующая экипаж о начале и окончании осуществления маневра обхода грозового очага, переходящая в режим ожидания во время взлета и посадки при истинной высоте менее 200 м по сигналам от радиовысотомера, а также переходящая в режим ожидания при наличии сигнализаций от системы предупреждения о приближении аэродинамических характеристик к критическим значениям, системы раннего предупреждения о близости земли (EGPWS) и системы предупреждения столкновения самолетов в воздухе (ACAS) с целью уменьшения рабочей нагрузки на экипаж.
| СПОСОБ ОБНАРУЖЕНИЯ И ПРЕДУПРЕЖДЕНИЯ УГРОЗЫ СТОЛКНОВЕНИЯ ВОЗДУШНОГО СУДНА С ПРЕПЯТСТВИЯМИ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ | 2005 |
|
RU2297047C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИМЕНЕНИЕМ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2002 |
|
RU2221208C2 |
| 0 |
|
SU151304A1 | |
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ РАЗЛИЧНЫХ КЛАССОВ (ВАРИАНТЫ) | 1999 |
|
RU2182313C2 |
| US 9524571 B2, 20.12.2016 | |||
| US 10339820 B2, 02.07.2019. | |||
