Изобретение относится к системам управления, предназначенным для применения на летательных аппаратах (ЛА), оборудованных бортовыми радиолокационными станциями (РЛС), и может быть использовано для определения оптимального маршрута обхода зон грозовой деятельности и ливневых осадков.
Известен способ оптимального обхода грозы [1], содержащий операцию грозолокации с использованием грозолокатора, устанавливаемого на борту летательного аппарата (ЛА), включающую в себя прием и обработку сигналов молниевых разрядов, вычисление по ним координат молний, идентификацию их принадлежности к определенной грозе, вычисление текущих координат центров гроз с учетом движения и маневров летательного аппарата, связь с бортом для получения параметров скорости V и курса ψ(t) ЛА, индицирование информации, необходимой для пилотирования ЛА при обходе грозы, отличающийся тем, что радиус текущей молниевой зоны в процессе сближения летательного аппарата с грозой формируют таким образом, чтобы к началу обхода грозы по границе этой зоны за все предыдущее время сближения с грозой ни одна идентифицированная молния не наблюдалась за пределами границы ретроспективно интерполированной этой молниевой зоны и не менее одной молнии находилось на ее границе, которая является кратчайшим путем обхода грозы при безопасности, определяемой количественно вероятностью попадания летательного аппарата во время обхода грозы в околомолниевое пространство не выше априори заданной величины.
Недостатками известного способа являются:
- отсутствие возможности применения способа на ЛА, оборудованных бортовыми РЛС, принцип действия которых основан не на фиксации отдельных молниевых разрядов, а на использовании явления отражения радиоволн от препятствий, расположенных на пути их распространения, формируя картину расположения грозового очага относительно траектории движения ВС;
- отсутствие возможности пользователя самостоятельно определять расстояние до границы молниевой зоны, на котором будет производиться обход.
Известен способ адаптивно-маршрутного управления пилотируемым летательным аппаратом [2], содержащий расчет оптимального маршрута полета при заданной группировке зенитных ракетных комплексов с известным пространственным распределением плотности вероятности поражения летательных аппаратов, формирование и доведение до экипажа полетного задания, повторный расчет маршрута при изменении тактической обстановки в районе полетов, корректировку полетного задания и доведение его до экипажа, отличающийся тем, что маршрут рассчитывают исходя из условия обеспечения минимальной опасности полета, достижимой при ограниченности бортового запаса топлива.
Недостатком способа является то, что в нем основу для достижения положительного эффекта функционирования создает априорно известная дислокация средств противовоздушной обороны в районе предполагаемых боевых действий, что не позволяет применить его для обхода грозовых очагов, так как их развитие подвержено трудно прогнозируемым изменениям во времени.
Технический результат, на достижение которого направлено предлагаемое изобретение, заключается в определении оптимального маршрута обхода летательными аппаратами зон грозовой деятельности и ливневых осадков, который позволяет обеспечить безопасность ЛА от связанных с грозой опасных метеоявлений и приемлемый уровень экономичности с точки зрения расхода топлива.
Для достижения технического результата способ определения оптимального маршрута обхода летательным аппаратом зон грозовой деятельности и ливневых осадков включает в себя этапы: 1) определение зоны грозовой деятельности; 2) дискретизация пространства и определение грозового участка; 3) определение участка обхода; 4) определение координат точек маршрута обхода; 5) выбор оптимального из возможных способов обхода.
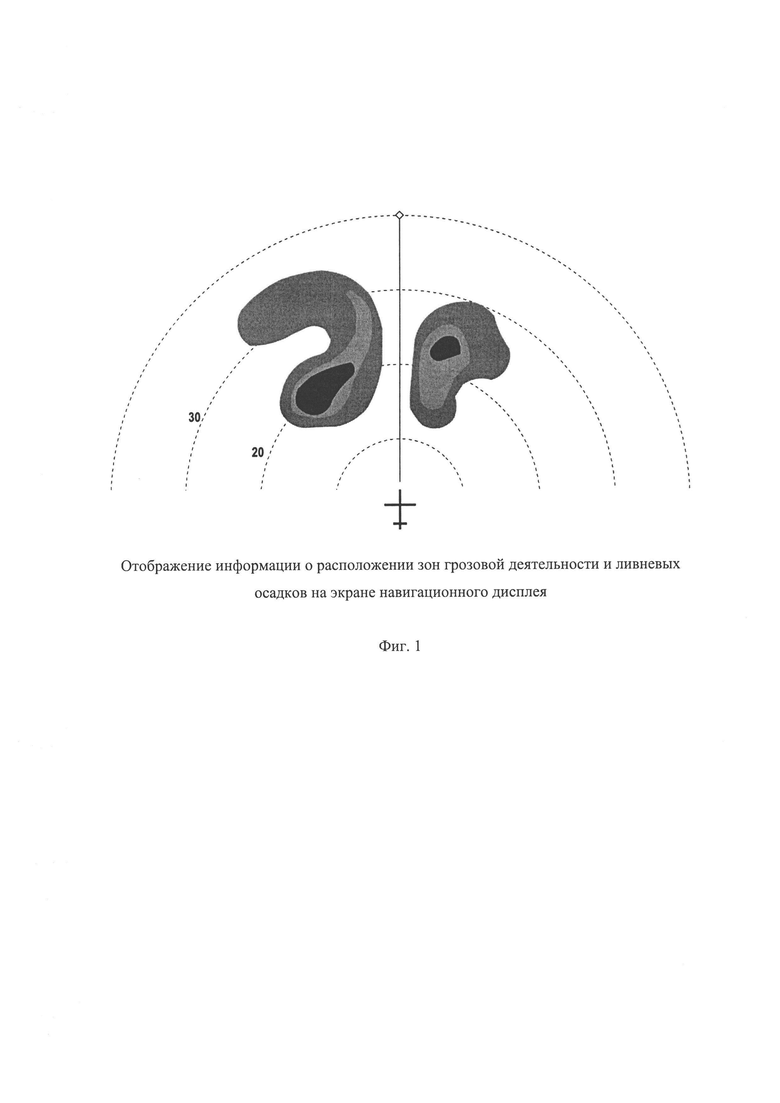
На первом этапе определяется зона грозовой деятельности, для чего используется информация о наличии зон грозовой деятельности и ливневых осадков от бортовой РЛС на расчетной траектории полета ЛА или на расстоянии S, определенном на этапе предполетной подготовки. На фиг. 1 приведен пример отображения информации о расположении зон грозовой деятельности и ливневых осадков на экране навигационного дисплея (ND).
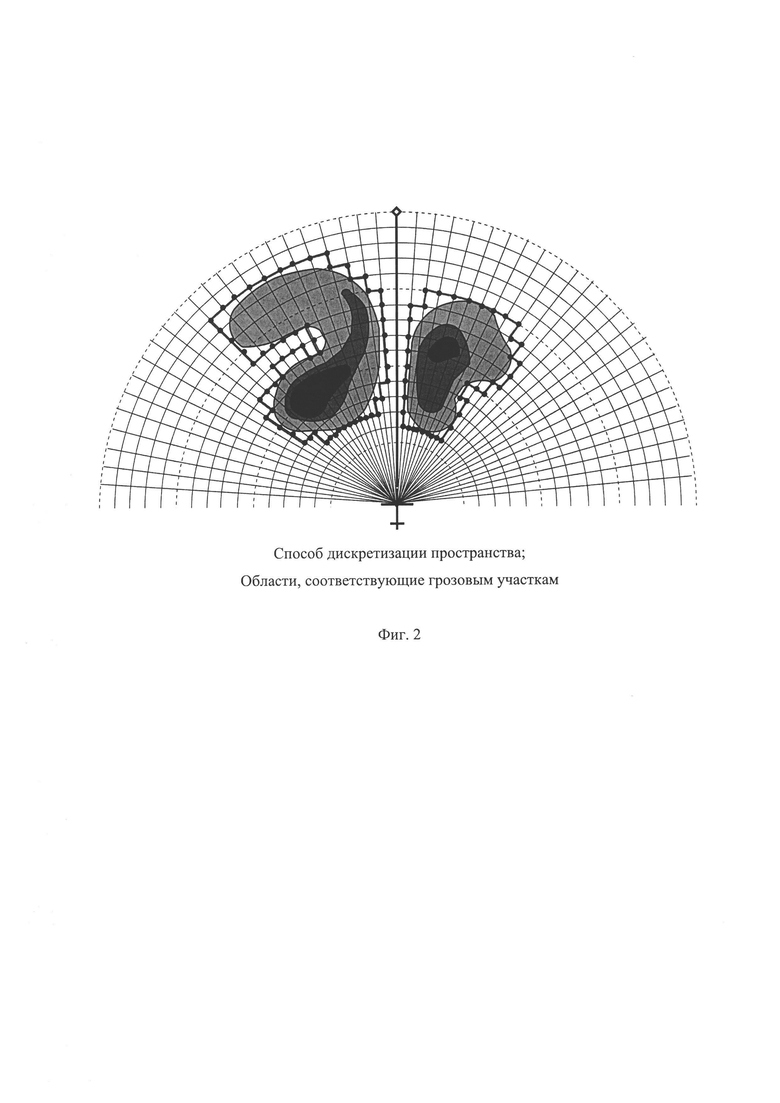
На втором этапе производится дискретизация пространства и определение грозового участка, для чего из точки, соответствующей центру масс ЛА, влево и вправо от оси расчетной траектории полета проводятся линии с шагом в 1°; также с шагом в 1 морскую милю (1 nm) проводятся концентрические полуокружности, центры которых совпадают с центром масс ЛА, формируя, таким образом, сетку полярной системы координат. В случае если участок зоны грозовой деятельности и ливневых осадков лежит внутри ячейки, образованной сеткой полярной системы координат, считается, что эта ячейка принадлежит грозовому участку.
Грозовой участок представляет собой совокупность соседних, т.е. имеющих хотя бы одну общую сторону, ячеек, внутри которых располагается участок зоны грозовой деятельности и ливневых осадков. На фиг. 2 представлен способ дискретизации пространства, а также представлены области, соответствующие грозовым участкам.
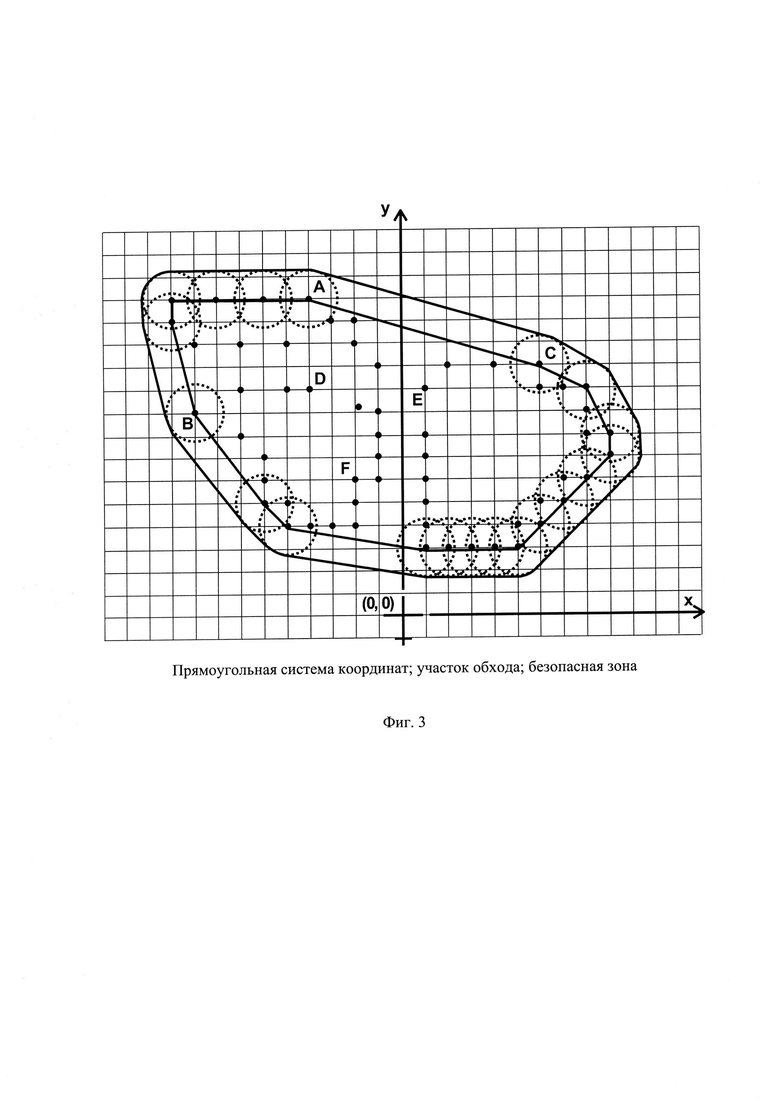
На третьем этапе определяется участок обхода, представляющий собой многоугольник, заданный точками, лежащими на узлах сетки полярной системы координат на границах грозового участка, после чего определяются полярные координаты этих точек (ϕ; ρ), которые переводятся в координаты (х; у) прямоугольной системы координат по формуле:

Центр этой системы координат лежит в центре масс ЛА, оси ординат у направлена вдоль первоначальной расчетной траектории полета, ось абсцисс х направлена под углом 90° вправо.
Далее производится проверка того, не находятся ли грозовые очаги на расстоянии, меньше расстояния L, заданного на этапе предполетной настройки, что ограничивало бы возможность пролета между ними, для чего вокруг каждой из полученных точек строятся окружности одинакового радиуса, соответствующего заданному расстоянию L, а все точки, лежащие внутри каждой из этих окружностей, группируются вместе и образуют общий участок обхода.
Участок обхода представляет собой выпуклый многоугольник, полученный путем применения метода построения минимальной выпуклой оболочки к точкам, лежащим на узлах сетки системы координат на границах грозовых очагов, сгруппированных вместе.
Выпуклое множество точек представляет собой множество точек, в котором все точки отрезка, образуемого любыми двумя точками данного множества, также принадлежат данному множеству [3].
Минимальная выпуклая оболочка множества точек представляет собой наименьшее выпуклое множество, содержащее эти точки; это замкнутая линия минимальной длины, такая, что все точки множества лежат внутри нее [4].
Для построения минимальной выпуклой оболочки множества точек применяется алгоритм Джарвиса, заключающийся в построении выпуклой оболочки путем выбора точек, лежащих на ее границе, последовательно, против часовой стрелки, начиная с определенной точки. Для этого берется точка р0 данного множества с наименьшим значением координаты у; в случае если таких точек несколько, берется та из них, у которой значение координаты х наибольшее; эта точка добавляется в ответ. На каждом следующем шаге алгоритма для последней добавленной точки pi среди всех ранее не добавленных точек и р0 ищется точка pi+1 с наименьшим полярным углом относительно точки pi, т.е. углом между направлением оси х и направлением на точку pi+1; найденная точка pi+1 добавляется в ответ. Алгоритм завершается при условии pi+1=р0. Полярный угол θ между точками pi с координатами (xi, yi) и pi+1 с координатами (xi+1, yi+1) определяется по формуле:

Вокруг каждой из выбранных с помощью алгоритма Джарвиса точек строятся окружности постоянного радиуса, равного расстоянию R, заданному на этапе предполетной подготовки, на котором будет производится обход грозового очага. Каждая точка огибающей этих окружностей удалена от грозового очага на безопасное расстояние, формируя, таким образом, кратчайший путь, по которому можно обогнуть данную зону грозового очага и ливневых осадков, учитывая при этом требование по выдерживанию заданного расстояния до границы зоны. Зона, заключенная внутри огибающей этих окружностей, называется безопасной зоной.
На фиг. 3 представлены прямоугольная система координат, центр которой лежит в центре масс ЛА, а также точки, лежащие на узлах сетки полярной системы координат на границах грозового участка, участок обхода, представляющий собой выпуклый многоугольник, полученный путем применения метода построения минимальной выпуклой оболочки к данным точкам, и безопасная зона, образованная огибающей окружностей, построенных вокруг точек, образующих участок обхода, с равными радиусами R, значения которых заданы на этапе предполетной подготовки.
Полет ЛА по маршруту, состоящему из дуг окружностей и прямых, т.е. по границе безопасной зоны, можно осуществить если задать маршрут полета зональной навигации (RNAV) с помощью точек пути (WP) типа Fly-by.
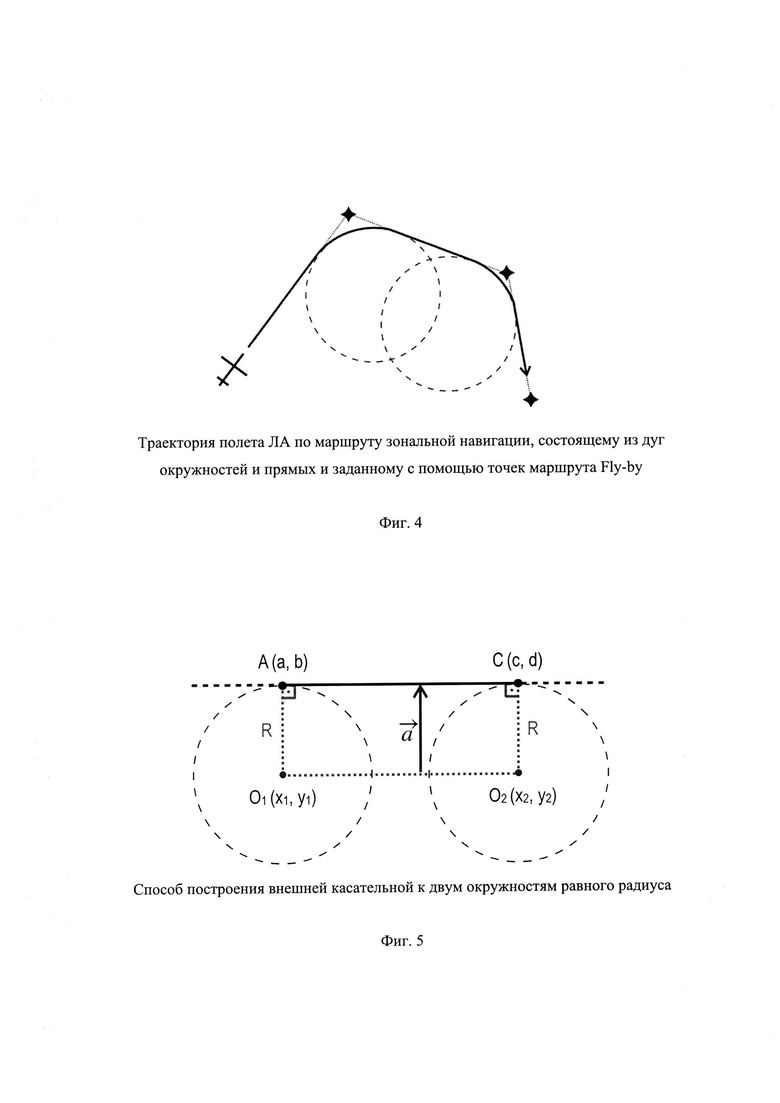
Контрольные точки пути типа Fly-by представляют собой контрольные точки, в которых разрешается упреждение разворота; при таком способе задачи маршрута полета ЛА проходит на некотором расстоянии от контрольной точки по внутренней траектории, определяемой углом между участками [5]. На фиг. 4 представлена траектория полета ЛА по маршруту зональной навигации, состоящему из дуг окружностей и прямых и заданному с помощью точек пути типа Fly-by. Таким образом, задача создания маршрута полета по границе безопасной зоны осуществляется путем определения координат точек типа Fly-by, образованных пересечением продолжений прямолинейных участков границы безопасной зоны.
Прямая, соответствующая прямолинейному участку безопасной зоны, является касательной к двум окружностям с известным радиусом R, заданном на этапе предполетной настройки, центры которых являются точками, выбранными с помощью алгоритма Джарвиса, координаты которых уже известны.
На фиг. 5 представлен способ построения внешней касательной к двум окружностям одинакового радиуса. Пусть даны две окружности O1 (x1, y1) и О2 (х2, у2) с равными радиусами R. Проведем прямую АС, являющуюся общей внешней касательной к этим окружностям, таким образом, что она касается O1 в точке А с координатами (а, b) и О2 в точке С с координатами (с, d). Четырехугольник О1АСО2 является прямоугольником, противоположные стороны которого О1О2 и АС равны и параллельны по свойству параллелограмма. Прямую АС можно получить параллельным переносом прямой О1О2 на вектор  который является нормальным вектором прямой О1О2 и равен R.
который является нормальным вектором прямой О1О2 и равен R.
Уравнение прямой О1О2, проходящей через точки О1 и О2 с известными координатами, имеет вид:

Приводя данное уравнение к общему виду Ах+Ву+С=0, получим:

Таким образом, коэффициенты А, В и С равны соответственно: A=y2-y1; В=x1-х2; С=-x1y2+x2y1.
Нормальный вектор прямой О1О2  равен:
равен:
 Длина этого вектора L равна:
Длина этого вектора L равна:

Поделив вектор на его длину, получим вектор единичной длины:

Умножив вектор единичной длины на R, получим вектор  который является нормальным к прямой O1O2 и длина которого равна R:
который является нормальным к прямой O1O2 и длина которого равна R:

Координаты (a, b) точки А и координаты (с, d) точки В получаются путем смещения координат точек O1 и О2 на вектор 




Знак «±» означает, что возможны два расположения прямой АС, т.к. она может находиться по обе стороны от прямой O1O2. Прямая, проходящая через точки А и В задается уравнением:


Подставив полученные значения а, b, с и d получим:

Подставив значения А и В, получим уравнение, которым задается прямая АС в виде Ах+Ву+С=0:

Однако уравнение задает две параллельные прямые, касающиеся окружностей с противоположных сторон. Для исключения лишней используется формула расстояния от точки до прямой. В качестве точки, характеризующей центр безопасной зоны, возьмем точку, расположенную на оси у таким образом, что ее координаты равны (0, уср), где уср представляет собой среднее арифметической максимального и минимального значения ординат точек, формирующих участок обхода. Тогда расстояние d между этой точкой и прямой, заданной в общем виде Ах+Ву+С=0, равно:

Таким образом, определяется расстояние от точки, характеризующей центр безопасной зоны, до двух прямых и выбирается та их них, которой соответствует большее значение расстояния d.
Точки на маршруте обхода определяются как точки пересечения прямых, заданных уравнениями, аналогичными уравнению (16), для двух соседних окружностей. Пусть первая их прямых задана уравнением:

а вторая прямая, являющаяся касательной к окружностям с центрами в точках О2 и О3, задана уравнением:

Точка пересечения этих прямых (х', у') имеет координаты:

 где
где

На четвертом этапе определяются координаты точек маршрута обхода, для чего по известным координатам центров окружностей определяются уравнения касательных к ним по формуле (16), после чего из дальнейших расчетов исключается лишняя из пары прямых, соответствующая меньшей дальности до точки, определяющей центр безопасной зоны, и определяются координаты точек типа Fly-by (Xi, Yi), задающих маршрут обхода зоны грозовой деятельности и ливневых осадков на заданном расстоянии R от границы участка обхода по формулам (23), (24) и (25):



где (xi, yi) - координаты точек, задающих участок обхода.
Возможные маршруты обхода генерируются путем создания комбинации из некоторого маневра выхода с расчетной траектории для полета по границе безопасной зоны, а также некоторого маневра возврата на расчетную траекторию после завершения обхода.
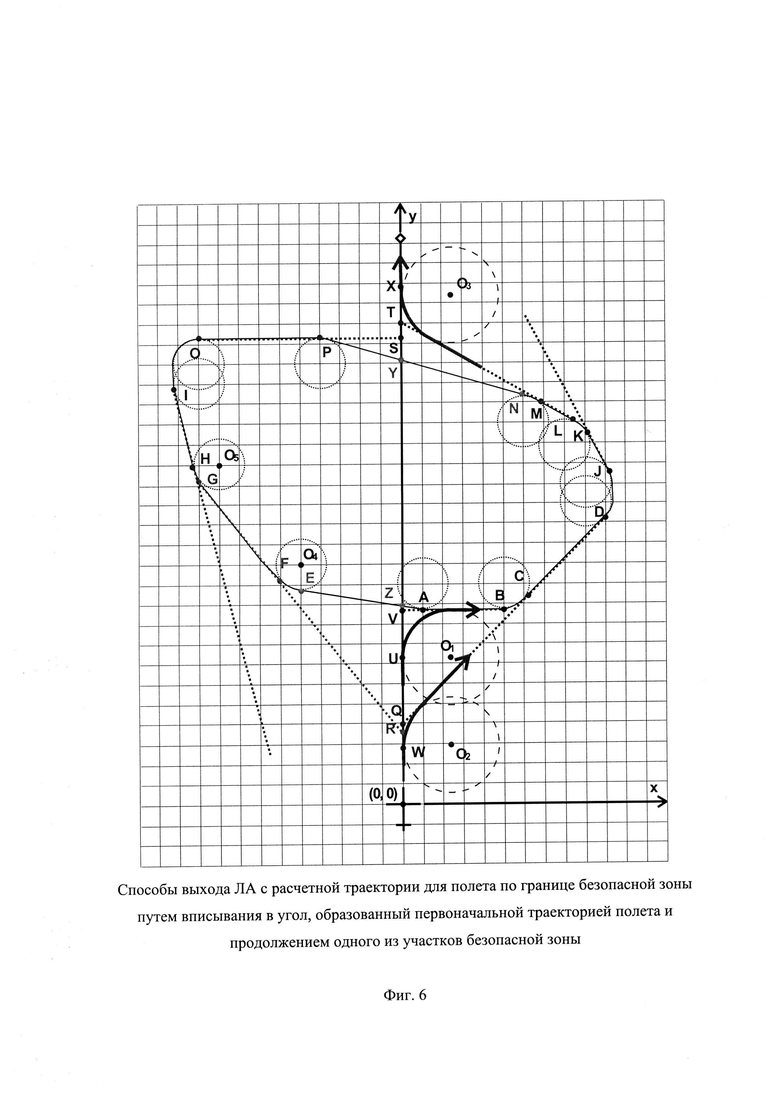
Рассмотрим способы выхода, когда ЛА вписывается в угол, образованный первоначальной траекторией полета и продолжением одного из прямолинейных участков безопасной зоны. На фиг.6 приведены возможные способы выхода ЛА с расчетной траектории для полета по границе безопасной зоны путем вписывания в угол, образованный первоначальной траекторией полета и продолжением одного из прямолинейных участков безопасной зоны.
В качестве параметра, определяющего эффективность способа обхода, может быть использован абсолютный показатель эффективности маршрута.
Абсолютный показатель эффективности маршрута обхода представляет собой разность длины маршрута обхода грозового очага и длины полета по участку расчетной траектории между точкой выхода с этой траектории и точкой возврата на нее:

где qабс - абсолютный показатель эффективности маршрута обхода;
Lобх - длина маршрута обхода;
Lрасч - длина участка расчетной траектории полета, заключенного между точками выхода с траекторией и точкой возврата на нее.
Меньшее значение qабс соответствует наиболее короткому и, следовательно, экономному маршруту обхода зоны грозовой деятельности и ливневых осадков.
Значение Lобх представляет собой длину маршрута обхода, состоящего из отрезков, заключенных между точками типа Fly-by:

где (Xi, Yi) - координаты точек типа Fly-by, задающих маршрут обхода зоны грозовой деятельности и ливневых осадков.
Значение Lрасч представляет собой длину участка расчетной траектории полета, заключенного между точками выхода с траекторией и точкой возврата на нее, и равно разности у-координат первой и последней точек типа Fly-by, задающих маршрут обхода зоны грозовой деятельности и ливневых осадков.
В частности, для способов выхода на маршрут обхода UVB и WQC, представленных на фиг.6, при условии, что дальнейшие траектории после пролета точки, заданной пересечением прямых АВ и CD, совпадают, а также заканчиваются в точке Т и равны Lост, значения абсолютных показателей эффективности qUVB и qWQC равны:


Сравнивая эти значения, получим:



Приближенно считая, что точки В и С совпадают, из неравенства треугольника QVB:


следовательно,

Маршрут обхода зоны грозовой деятельности и ливневых осадков с маневром выхода WQC является более экономичным, откуда следует, что наиболее экономичным из способов обхода будет являться тот, в котором точка выхода на маршрут обхода и точка, в которой ЛА возвращается на расчетную траекторию, расположены на наибольшем удалении от безопасной зоны. В любой момент времени такой точкой выхода является текущее местоположение ЛА, а точкой возврата является точка, соответствующая следующему поворотному пункту маршрута.
Достоинство этого способа заключается в том, что он является наиболее экономичным, однако его применение может привести к тому, что он не исключает возможности слишком раннего отклонения ЛА от первоначальной траектории полета и, как следствие, выхода ЛА за пределы границ воздушной трассы.
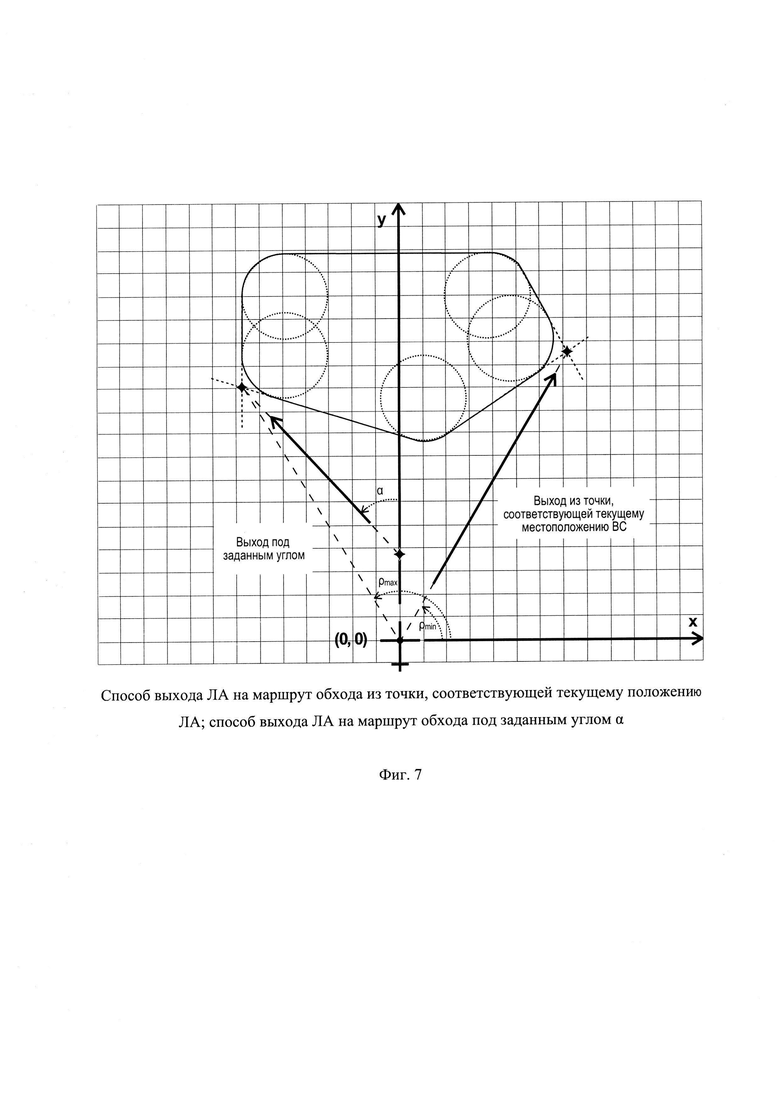
Альтернативным способом выхода на маршрут обхода является выход на маршрут обхода под заданным углом. Для реализации этого способа определяется задающая маршрут обхода точка типа Fly-by, которой соответствует наименьший (при обходе справа) или наибольший (при обходе слева) полярный угол ρ, в которую ЛА будет следовать под углом α, значение которого задается оператором на этапе предполетной настройки. Возврат на первоначальную траекторию полета может быть осуществлен аналогично под углом, значение которого задано оператором. Использование такого способа позволяет не допустить слишком раннего начала обхода и, как следствие, преждевременного выхода ЛА за пределы ширины воздушной трассы.
Для определения точки типа Fly-by, в которой при реализации способа выхода на маршрут обхода под заданным углом а будет начат маневр выхода на маршрут обхода, определяется уравнение прямой, проходящей через точку с наименьшим (или наибольшим) полярными координатами (X', Y'), для чего угловой коэффициент k этой прямой определяется как:

Уравнение этой прямой, проходящей через точку (X', Y'), имеет вид:

Точка типа Fly-by (Хобх, Yобх), в которой должен быть начат маневр обхода, определяется по пересечению прямой, заданной уравнением (37) с прямой у=0. Координата у этой точки равна Yобх=0, а координата х равна Xобх=X'-(Y'/ctg(α)).
На фиг. 7 приведены способ выхода ЛА на маршрут обхода из точки, соответствующей текущему положению ЛА, а также способ выхода ЛА на маршрут обхода под углом α, заданным оператором.
На пятом этапе производится выбор оптимального способа обхода зоны грозовой деятельности и ливневых осадков, для чего выбирается комбинация из маневра выхода на маршрут обхода и маневра возврата на первоначальную траекторию полета.
Возможными маневрами выхода на маршрут обхода являются:
1. Выход на маршрут обхода из точки, соответствующей текущему местоположения ЛА, при осуществлении которого после обнаружения зоны грозовой деятельности и ливневых осадков ЛА следует сразу в одну из задающих маршрут обхода точек типа Fly-by, которой соответствует наименьший (при обходе справа) или наибольший (при обходе слева) полярный угол ρ;
2. Выход на маршрут обхода под заданным углом, при осуществлении которого после обнаружения зоны грозовой деятельности и ливневых осадков ЛА следует в одну из задающих маршрут обхода точек типа Fly-by, которой соответствует наименьший (при обходе справа) или наибольший (при обходе слева) полярный угол ρ из точки, расположенной на расчетной траектории полета, с координатами (Хобх, Yобх), под заданным оператором углом α.
Возможными маневрами возврата на расчетную траекторию полета после завершения маневра обхода являются:
1. Возврат на расчетную траекторию в точку, соответствующую следующему поворотному пункту маршрута, при осуществлении которого после завершения маневра обхода ЛА следует в следующий поворотный пункт маршрута;
2. Возврат на расчетную траекторию полета под заданным углом, при осуществлении которого после завершения маневра обхода ЛА возвращается на расчетную траекторию полета в точку, расположенную на этой траектории, под заданным оператором углом α.
Предпочтительный способ выхода на маршрут обхода, а также предпочтительный способ возврата на расчетную траекторию полета, выбирается оператором на этапе предполетной настройки.
После выбора оптимального способа обхода зоны грозовой деятельности и ливневых осадков прямоугольные координаты точек типа Fly-by, задающих маршрут обхода, переводятся в геодезические координаты и используются для изменения текущего маршрута полета, представленного в плане полета, а также для отображения оператору на экране навигационного дисплея.
На этапе предполетной настройки системы оператором выбираются предпочтительный способ выхода на маршрут обхода и предпочтительный способ возврата на расчетную траекторию полета, а также вводятся следующие данные:
1. Максимальное расстояние от расчетной траектории полета до зоны грозовой деятельности и ливневых осадков S, при котором на первом этапе определяется зона грозовой деятельности;
2. Минимальное расстояние между соседними зонами грозовой деятельности и ливневых осадков L, позволяющее ЛА безопасно пролететь между ними;
3. Расстояние R от зоны грозовой деятельности и ливневых осадков, на котором производится обход зоны;
4. Значение угла а, под которым осуществляются выход на маршрут обхода и возврат на расчетную траекторию полета под заданным углом.
Изобретение представляет собой способ определения оптимального маршрута обхода летательным аппаратом зон грозовой деятельности и ливневых осадков, обеспечивающий определение координат точек пути, задающих маршрут обхода зон грозовой деятельности и ливневых осадков с учетом предпочтений оператора и данных, введенных им на этапе предполетной настройки, таким образом, что обход зоны грозовой деятельности и ливневых осадков является самым коротки, т.е. наиболее экономичным с точки зрения минимизации затрат топлива, но в то же время достаточно безопасным с точки зрения предотвращения попадания ЛА в зону грозовой деятельности и ливневых осадков.
Источники информации:
1. Патент РФ №2316023, G01S 13/95, Макуренков А.Ф., Гуськов Ю.Н., Канащенков А.И., Рогов В.Я.
2. Патент РФ №2568161, G05D 1/12, Марусин В.С, Столяров О.Г., Ярошенко С.В.
3. Gomes A. J. P. A total order heuristic-based convex hull algorithm for points in the plane // Computer-Aided Design. - 2016. - Vol.70. - P. 153-160.
4. Seidel R. Convex hull computations // Handbook of discrete and computational geometry. - CRC, 2017. - P. 687-703.
5. Липин А. В. Зональная навигация с применением навигационных характеристик: учебное пособие. - Вузовское образование, 2017.-150 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНТЕЛЛЕКТУАЛЬНАЯ АДАПТИВНАЯ СИСТЕМА ПОДДЕРЖКИ ПРИНЯТИЯ ЭКИПАЖЕМ ЛЕТАТЕЛЬНОГО АППАРАТА РЕШЕНИЙ ПО ОБХОДУ ОЧАГОВ ГРОЗОВОЙ ДЕЯТЕЛЬНОСТИ | 2023 |
|
RU2798629C1 |
| СПОСОБ АДАПТИВНО-МАРШРУТНОГО УПРАВЛЕНИЯ ПИЛОТИРУЕМЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2013 |
|
RU2568161C2 |
| СПОСОБ ОПТИМАЛЬНОГО ОБХОДА ГРОЗЫ | 2005 |
|
RU2316023C2 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ ГРОЗОВОЙ ОПАСНОСТИ | 1996 |
|
RU2100824C1 |
| СПОСОБ ФОРМИРОВАНИЯ ОБХОДА И ПРЕОДОЛЕНИЯ ОПАСНЫХ ЗОН БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2022 |
|
RU2797956C1 |
| БОРТОВОЙ ГРОЗОПЕЛЕНГАТОР-ДАЛЬНОМЕР | 2000 |
|
RU2200963C2 |
| ИНТЕГРАЛЬНЫЙ ПИЛОТАЖНО-НАВИГАЦИОННЫЙ ДИСПЛЕЙ | 1991 |
|
RU2014250C1 |
| Способ оптимальной адаптации маршрута перехвата воздушной цели при нахождении в районе полетов группировки зенитных ракетных комплексов | 2020 |
|
RU2734171C1 |
| Способ обеспечения воздушных судов метеорологической информацией | 2017 |
|
RU2672040C2 |
| СПОСОБ ПЛАНИРОВАНИЯ ТРАЕКТОРИИ ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2017 |
|
RU2649287C2 |
Изобретение относится к способу определения оптимального маршрута обхода летательными аппаратами (ЛА) зон грозовой деятельности и ливневых осадков. Для определения оптимального маршрута производят предполетную настройку, при которой вводятся данные максимального расстояния от расчетной траектории полета до зоны грозовой деятельности и ливневых осадков, минимальное расстояние между соседними зонами грозовой деятельности и ливневых осадков, позволяющее ЛА безопасно пролететь между ними, расстояние от зоны грозовой деятельности и ливневых осадков, на котором производится обход зоны, значение угла, под которым осуществляются выход на маршрут обхода и возврат на расчетную траекторию полета. Во время полета определяют от бортовой РЛС зону грозовой деятельности, расположенную на расстоянии не более заданного расстояния от расчетной траектории полета ЛА, определяют координаты грозового участка, определяют оптимальный участок обхода и оптимальный способ возврата на первоначальную траекторию полета определенным образом, используя предварительно заданные данные. Обеспечивается повышение безопасности ЛА от связанных с грозой опасных метеоявлений и приемлемый уровень экономичности с точки зрения расхода топлива. 7 ил.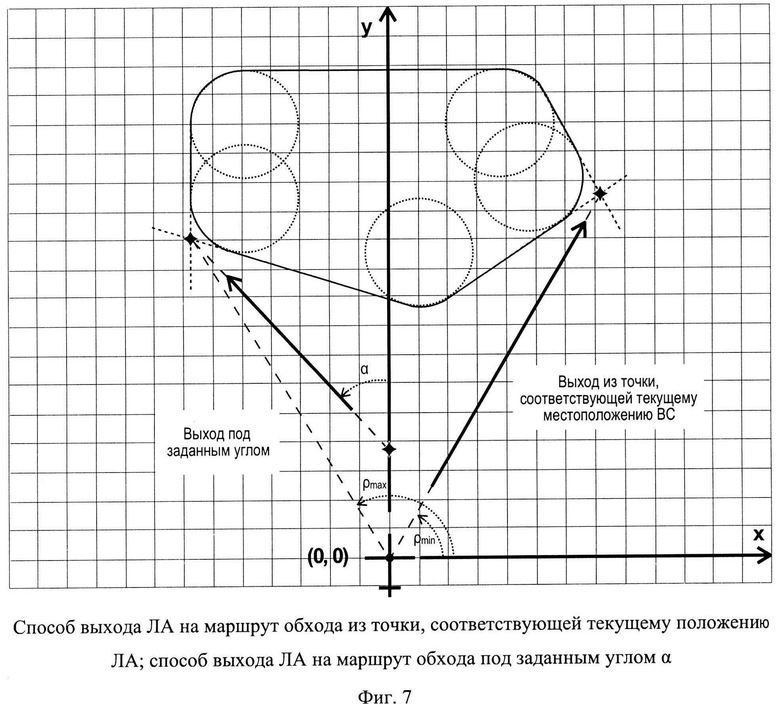
Способ определения оптимального маршрута обхода летательными аппаратами зон грозовой деятельности и ливневых осадков, содержащий этап определения по информации от бортовой РЛС зоны грозовой деятельности, расположенной на расстоянии не более заданного расстояния S от расчетной траектории полета ЛА; этап дискретизации пространства, заключающейся в создании связанной с ЛА полярной системы координат и определении грозового участка, представляющего собой совокупность имеющих хотя бы одну общую сторону ячеек полярной системы координат, внутри которых располагается участок зоны грозовой деятельности и ливневых осадков; этап определения участка обхода, который представляет собой выпуклый многоугольник, полученный путем применения метода построения минимальной выпуклой оболочки к точкам, лежащим на узлах сетки системы координат на границах грозовых очагов, сгруппированных вместе, заключающийся в определении полярных координат точек, лежащих на узлах сетки полярной системы координат на границах грозового участка, и переводе этих координат в координаты прямоугольной системы координат, связанной с ЛА, а также в объединении всех таких точек, лежащих на расстоянии менее заданного расстояния L друг от друга в общий участок обхода; этап определения координат точек маршрута обхода (Xi, Yi), представляющих собой точки маршрута зональной навигации типа Fly-by, заключающийся в определении координат точек пересечения касательных к окружностям заданного радиуса R, построенных вокруг точек с координатами (xi, yi), формирующих грозовой участок, по формулам


где 
и исключении из дальнейших расчетов той из пары точек, расстояние от которой до точки, характеризующей центр участка обхода, является наименьшим; этап выбора оптимального способа обхода зоны грозовой деятельности и ливневых осадков, заключающийся в выборе комбинации из маневра выхода на маршрут обхода и маневра возврата на первоначальную траекторию полета, при этом возможными маневрами выхода на маршрут обхода являются: 1) выход на маршрут обхода из точки, соответствующей текущему местоположения ЛА, при осуществлении которого после обнаружения зоны грозовой деятельности и ливневых осадков ЛА следует сразу в одну из задающих маршрут обхода точек типа Fly-by, которой соответствует наименьший (при обходе справа) или наибольший (при обходе слева) полярный угол ρ; и 2) выход на маршрут обхода под заданным углом, при осуществлении которого после обнаружения зоны грозовой деятельности и ливневых осадков ЛА следует в одну из задающих маршрут обхода точек типа Fly-by, которой соответствует наименьший (при обходе справа) или наибольший (при обходе слева) полярный угол ρ из точки, расположенной на расчетной траектории полета, с координатами (Хобх, Yобx), под заданным углом α, а возможными маневрами возврата на расчетную траекторию полета после завершения маневра обхода являются: 1) возврат на расчетную траекторию в точку, соответствующую следующему поворотному пункту маршрута, при осуществлении которого после завершения маневра обхода ЛА следует в следующий поворотный пункт маршрута; и 2) возврат на расчетную траекторию полета под заданным углом, при осуществлении которого после завершения маневра обхода ЛА возвращается на расчетную траекторию полета в точку, расположенную на этой траектории, под заданным углом α; этап предполетной настройки, на котором выбираются предпочтительный способ выхода на маршрут обхода и предпочтительный способ возврата на расчетную траекторию полета, а также вводятся данные: 1) максимальное расстояние от расчетной траектории полета до зоны грозовой деятельности и ливневых осадков S; 2) минимальное расстояние между соседними зонами грозовой деятельности и ливневых осадков L, позволяющее ЛА безопасно пролететь между ними; 3) расстояние R от зоны грозовой деятельности и ливневых осадков, на котором производится обход зоны; 4) значение угла α, под которым осуществляются выход на маршрут обхода и возврат на расчетную траекторию полета под заданным углом.
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИМЕНЕНИЕМ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2002 |
|
RU2221208C2 |
| 0 |
|
SU151304A1 | |
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ РАЗЛИЧНЫХ КЛАССОВ (ВАРИАНТЫ) | 1999 |
|
RU2182313C2 |
| US 8649919 B2, 11.02.2014 | |||
| US 9524571 B2, 20.12.2016 | |||
| US 10339820 B2, 02.07.2019. | |||
