Изобретение относится к области локации и может быть использовано при эксплуатации существующих и перспективных прицельно-навигационных комплексов летательных аппаратов (ЛА).
Наиболее близким по сущности к заявляемому изобретению является способ юстировки РЛС, относящийся к способам юстировки бортовых радиолокационных и оптико-электронных станций летательных аппаратов. Он основан на многократном измерении координат воздушного объекта, определении систематических ошибок юстировки радиолокационной и оптико-электронной станций, вычислении среднего значения измеренных угловых координат воздушного объекта и их введении в алгоритм прицеливания авиационного средства поражения [см. патент RU 2757679, Способ юстировки бортовых радиолокационной и оптико-электронной станций летательного аппарата, МПК G01S 7/40, опубл. 20.10.2021, бюл. №29, авторы Моисеев С.Н., Филиппов А.В. и др.].
Недостатком данного способа является низкая точность определения систематических ошибок юстировки, которая обусловлена влиянием нестационарности ошибки юстировки в зависимости от текущей дальности до цели.
Техническим результатом изобретения является повышение точности определения ошибок юстировки РЛС и ОЭС за счет многократного измерения угловых координат воздушного объекта с помощью РЛС и ОЭС осуществляют в течение заданных интервалов времени на фиксированных дальностях, при этом  где
где  - дальность обнаружения воздушного объекта ОЭС, расчета на каждой дальности рассогласования одноименных угловых координат воздушного объекта, измеренных РЛС и ОЭС, вычисления среднего значения полученных рассогласований по каждой координате для каждой дальности, построения зависимости ошибки юстировки от дальности и введения ее в алгоритм прицеливания авиационного средства поражения.
- дальность обнаружения воздушного объекта ОЭС, расчета на каждой дальности рассогласования одноименных угловых координат воздушного объекта, измеренных РЛС и ОЭС, вычисления среднего значения полученных рассогласований по каждой координате для каждой дальности, построения зависимости ошибки юстировки от дальности и введения ее в алгоритм прицеливания авиационного средства поражения.
Технический результат достигается тем, что в известном способе юстировки бортовых РЛС и ОЭС, включающем многократное измерение координат воздушного объекта, вычисление среднего значения измеренных угловых координат воздушного объекта, определение систематических ошибок юстировки РЛС и ОЭС, и их введение в алгоритм прицеливания авиационного средства поражения, согласно изобретению многократное измерение угловых координат воздушного объекта с помощью РЛС и ОЭС осуществляют в течение заданных интервалов времени на фиксированных дальностях, при этом  где
где  - дальность обнаружения воздушного объекта ОЭС, рассчитывают на каждой дальности рассогласование одноименных угловых координат воздушного объекта, измеренных РЛС и ОЭС, вычисляют средние значения полученных рассогласований по каждой координате для каждой дальности, строят зависимость ошибки юстировки от дальности и вводят ее в алгоритм прицеливания авиационного средства поражения.
- дальность обнаружения воздушного объекта ОЭС, рассчитывают на каждой дальности рассогласование одноименных угловых координат воздушного объекта, измеренных РЛС и ОЭС, вычисляют средние значения полученных рассогласований по каждой координате для каждой дальности, строят зависимость ошибки юстировки от дальности и вводят ее в алгоритм прицеливания авиационного средства поражения.
Сущность изобретения заключается в том, что в многократное измерение угловых координат воздушного объекта с помощью РЛС и ОЭС осуществляют в течение заданных интервалов времени на N фиксированных дальностях, при этом  где
где  - дальность обнаружения воздушного объекта ОЭС, рассчитывают на каждой дальности рассогласование одноименных угловых координат воздушного объекта, измеренных РЛС и ОЭС, вычисляют средние значения полученных рассогласований по каждой координате для каждой дальности, строят зависимость ошибки юстировки от дальности и вводят ее в алгоритм прицеливания авиационного средства поражения.
- дальность обнаружения воздушного объекта ОЭС, рассчитывают на каждой дальности рассогласование одноименных угловых координат воздушного объекта, измеренных РЛС и ОЭС, вычисляют средние значения полученных рассогласований по каждой координате для каждой дальности, строят зависимость ошибки юстировки от дальности и вводят ее в алгоритм прицеливания авиационного средства поражения.
Одним из факторов, оказывающих существенное влияние на точность применения авиационных средств поражения, является нестационарность ошибки юстировки при измерении координат воздушного объекта РЛС и ОЭС в течение полета летательного аппарата [Лебедев Л.А., Федоров В.В. Источники ошибок и пути поддержания заданных точностных характеристик применения АСП самолетами военного назначения. // Сборник научных статей по материалам Всероссийской научно- практической конференции «Проблемы эксплуатации авиационной техники в современных условиях», 2018. - с. 88-93; Федоров В.В., Лебедев Л.А., Макаров В.А., Селезнев Д.А. Проблемы выполнения и пути совершенствования процессов юстировки прицельных устройств бортовых комплексов воздушных судов ВВС.// Сборник научных статей по материалам Всероссийской научно-практической конференции «Проблемы эксплуатации авиационной техники в современных условиях», 2018. - с. 110-115]. При этом в зависимости от сложившихся в полете метеоусловий значительно изменяются значения максимальной дальности обнаружения цели ОЭС. Кроме того, в зависимости от текущей дальности до цели ошибки юстировки РЛС и ОЭС также изменяются в значительном диапазоне. Для устранения указанных факторов согласно изобретению в полете с помощью ОЭС обнаруживают воздушный объект на дальности , многократное измерение угловых координат воздушного объекта с помощью РЛС и ОЭС осуществляют в течение заданных интервалов времени на N фиксированных дальностях, при этом где - дальность обнаружения воздушного объекта ОЭС, рассчитывают на каждой дальности рассогласование одноименных угловых координат воздушного объекта, измеренных РЛС и ОЭС, вычисляют средние значения полученных рассогласований по каждой координате для каждой дальности, строят зависимость ошибки юстировки от дальности и вводят ее в алгоритм прицеливания авиационного средства поражения.
Известно [Вентцель Е.С. Теория вероятностей / Учебник для вузов. М.: Высшая школа, 1999. - с. 351-356], что для измерений на N=3 фиксированных дальностях можно определить калибровочную зависимость ошибки юстировки по азимуту ε от дальности, выражаемую аналитическим полиномом второй степени  коэффициенты
коэффициенты  которого определяются с помощью метода наименьших квадратов. Для этого решают систему линейных уравнений вида:
которого определяются с помощью метода наименьших квадратов. Для этого решают систему линейных уравнений вида:
где коэффициенты системы линейных уравнений представляют собой статистические моменты двух величин - дальности Dц и азимута ε:
С учетом измерений азимута цели на N=3 дальностях и после преобразований получим коэффициенты полинома:
 где
где 
Аналогично определяют коэффициенты  полинома
полинома  для калибровочной зависимости ошибки юстировки по углу места.
для калибровочной зависимости ошибки юстировки по углу места.
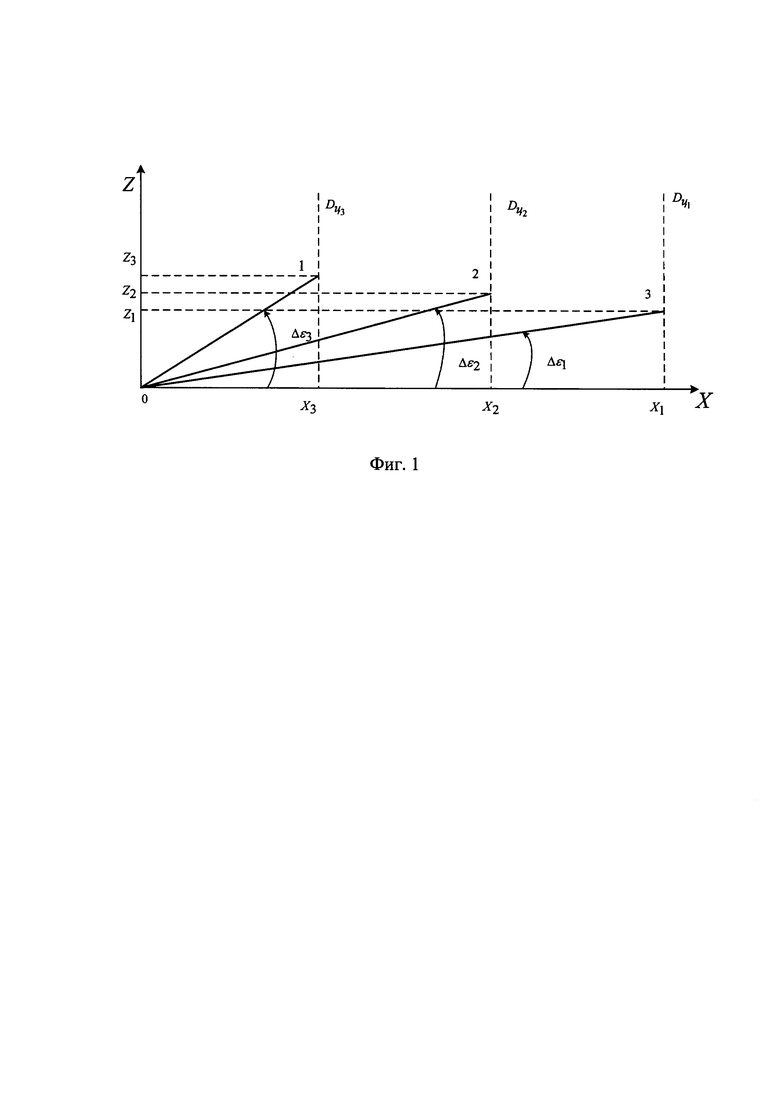
Взаимное расположение летательного аппарата с РЛС и ОЛС и воздушного объекта представлено на фиг. 1, где обозначено: 0 - летательный аппарат с РЛС и ОЭС, 1, 2, 3 - положение воздушного объекта на дальностях  соответственно. Информация об угловых координатах воздушного объекта относительно воздушного судна используется для юстировки РЛС и ОЭС. На фиг. 1 схематично изображен азимут воздушного объекта, измеренный с помощью ОЭС и РЛС. В полете с помощью ОЭС обнаруживают воздушный объект на дальности
соответственно. Информация об угловых координатах воздушного объекта относительно воздушного судна используется для юстировки РЛС и ОЭС. На фиг. 1 схематично изображен азимут воздушного объекта, измеренный с помощью ОЭС и РЛС. В полете с помощью ОЭС обнаруживают воздушный объект на дальности  при этом необходимо обеспечить обнаружение на максимально возможной для сложившихся метеоусловий дальности
при этом необходимо обеспечить обнаружение на максимально возможной для сложившихся метеоусловий дальности  . Многократное измерение угловых координат воздушного объекта с помощью РЛС и ОЭС осуществляют, например, на трех фиксированных дальностях, соответствующих дальности обнаружения ОЭС
. Многократное измерение угловых координат воздушного объекта с помощью РЛС и ОЭС осуществляют, например, на трех фиксированных дальностях, соответствующих дальности обнаружения ОЭС  , а также 2/3 и 1/3 от ее величины в течение заданных интервалов времени. Для каждой фиксированной дальности рассчитывают рассогласование одноименных угловых координат воздушного объекта, измеренных РЛС и ОЭС, вычисляют средние значения полученных рассогласований по каждой координате для каждой дальности. Калибровочную зависимость ошибки юстировки по азимуту (углу места) от дальности строят, аппроксимируя средние значения полученных рассогласований, например, методом наименьших квадратов. Калибровочную зависимость ошибки юстировки от дальности вводят в алгоритм прицеливания авиационного средства поражения. При прицеливании соответствующее текущей дальности до цели калибровочное значение ошибки юстировки по азимуту (углу места) используют для расчета прицельных параметров.
, а также 2/3 и 1/3 от ее величины в течение заданных интервалов времени. Для каждой фиксированной дальности рассчитывают рассогласование одноименных угловых координат воздушного объекта, измеренных РЛС и ОЭС, вычисляют средние значения полученных рассогласований по каждой координате для каждой дальности. Калибровочную зависимость ошибки юстировки по азимуту (углу места) от дальности строят, аппроксимируя средние значения полученных рассогласований, например, методом наименьших квадратов. Калибровочную зависимость ошибки юстировки от дальности вводят в алгоритм прицеливания авиационного средства поражения. При прицеливании соответствующее текущей дальности до цели калибровочное значение ошибки юстировки по азимуту (углу места) используют для расчета прицельных параметров.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЮСТИРОВКИ БОРТОВЫХ РАДИОЛОКАЦИОННОЙ И ОПТИКО-ЭЛЕКТРОННОЙ СТАНЦИЙ ЛЕТАТЕЛЬНОГО АППАРАТА | 2020 |
|
RU2757679C1 |
| СПОСОБ ПРОГРАММНО-КОРРЕКТИРУЕМОГО СОПРОВОЖДЕНИЯ ЦЕЛИ | 2022 |
|
RU2795367C1 |
| АВИАЦИОННЫЙ ИНТЕГРИРОВАННЫЙ МНОГОКАНАЛЬНЫЙ, МНОГОРЕЖИМНЫЙ РАДИОЭЛЕКТРОННЫЙ КОМПЛЕКС | 2004 |
|
RU2266235C1 |
| АЭРОДРОМНЫЙ АВТОМАТИЗИРОВАННЫЙ КОМПЛЕКС МОНИТОРИНГА, УПРАВЛЕНИЯ И ДЕМОНСТРАЦИИ ПОЛЕТОВ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2010 |
|
RU2426074C1 |
| СПОСОБ ВЫЯВЛЕНИЯ И КОМПЕНСАЦИИ ОШИБКИ ПРИЦЕЛИВАНИЯ В КОРАБЕЛЬНОМ АРТИЛЛЕРИЙСКОМ КОМПЛЕКСЕ | 2004 |
|
RU2265184C1 |
| НАЗЕМНЫЙ МАЛОГАБАРИТНЫЙ ТРАНСПОРТНЫЙ КОМПЛЕКС ДЛЯ ОСВЕЩЕНИЯ ПРИБРЕЖНОЙ ОБСТАНОВКИ | 2013 |
|
RU2538187C1 |
| МОБИЛЬНЫЙ КОМПЛЕКС ДЛЯ ОБНАРУЖЕНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 2019 |
|
RU2742130C1 |
| СПОСОБ СКРЫТНОГО САМОНАВЕДЕНИЯ САМОЛЕТОВ НА ВОЗДУШНЫЕ ОБЪЕКТЫ | 2009 |
|
RU2408845C1 |
| ЗЕНИТНЫЙ РАКЕТНО-ПУШЕЧНЫЙ КОМПЛЕКС | 1998 |
|
RU2131577C1 |
| ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА БЕСПИЛОТНОГО САМОЛЕТА-ИСТРЕБИТЕЛЯ | 2010 |
|
RU2418267C1 |
Изобретение относится к области локации и может быть использовано при эксплуатации существующих и перспективных прицельно-навигационных комплексов летательных аппаратов. Техническим результатом изобретения является повышение точности определения ошибок юстировки бортовых радиолокационной (РЛС) и оптико-электронной станций (ОЭС) воздушного судна. Заявленный способ включает многократное измерение координат воздушного объекта в течение заданных интервалов времени на N фиксированных дальностях, при этом  где
где  - максимальная дальность обнаружения воздушного объекта ОЭС при сложившихся метеоусловиях. На каждой дальности рассчитывают рассогласование одноименных угловых координат воздушного объекта, измеренных РЛС и ОЭС, вычисляют средние значения полученных рассогласований по каждой координате для каждой дальности, строят зависимость ошибки юстировки от дальности и вводят ее в алгоритм прицеливания авиационного средства поражения. 1 ил.
- максимальная дальность обнаружения воздушного объекта ОЭС при сложившихся метеоусловиях. На каждой дальности рассчитывают рассогласование одноименных угловых координат воздушного объекта, измеренных РЛС и ОЭС, вычисляют средние значения полученных рассогласований по каждой координате для каждой дальности, строят зависимость ошибки юстировки от дальности и вводят ее в алгоритм прицеливания авиационного средства поражения. 1 ил.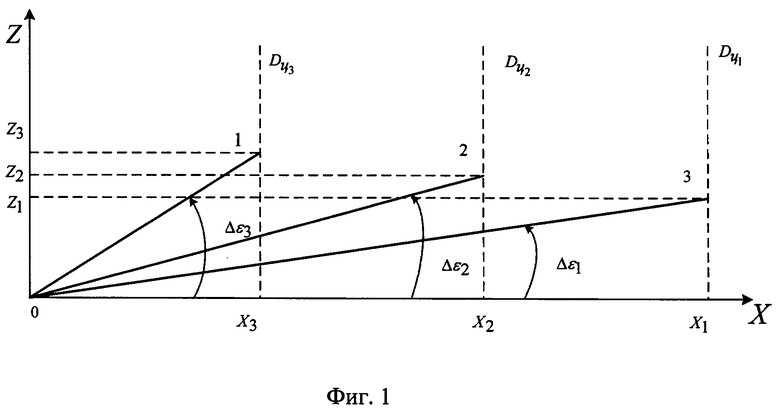
Способ юстировки бортовых радиолокационной и оптико-электронной станций воздушного судна, включающий многократное измерение координат воздушного объекта, вычисление среднего значения измеренных угловых координат воздушного объекта, определение систематической ошибки юстировки радиолокационной и оптико-электронной станций и ее введение в алгоритм прицеливания авиационного средства поражения, отличающийся тем, что многократное измерение угловых координат воздушного объекта с помощью РЛС и ОЭС осуществляют в течение заданных интервалов времени на N фиксированных дальностях, при этом  где
где  – максимальная дальность обнаружения воздушного объекта ОЭС при сложившихся в течение полета воздушного судна метеоусловиях, рассчитывают на каждой дальности рассогласование одноименных угловых координат воздушного объекта, измеренных РЛС и ОЭС, вычисляют средние значения полученных рассогласований по каждой координате для каждой дальности, строят зависимость ошибки юстировки от дальности и вводят ее в алгоритм прицеливания авиационного средства поражения.
– максимальная дальность обнаружения воздушного объекта ОЭС при сложившихся в течение полета воздушного судна метеоусловиях, рассчитывают на каждой дальности рассогласование одноименных угловых координат воздушного объекта, измеренных РЛС и ОЭС, вычисляют средние значения полученных рассогласований по каждой координате для каждой дальности, строят зависимость ошибки юстировки от дальности и вводят ее в алгоритм прицеливания авиационного средства поражения.
| СПОСОБ ЮСТИРОВКИ БОРТОВЫХ РАДИОЛОКАЦИОННОЙ И ОПТИКО-ЭЛЕКТРОННОЙ СТАНЦИЙ ЛЕТАТЕЛЬНОГО АППАРАТА | 2020 |
|
RU2757679C1 |
| ПОТАПОВ А.Н., МОИСЕЕВ С.Н., ПОПОВ П.Г | |||
| Методика исследований точностных характеристик бортовых радиолокационных систем сопровождения воздушных целей на базе летного эксперимента // Научный вестник оборонно-промышленного комплекса России, N 4, 2017, сс.77-86 | |||
| КИРПИЧНИКОВ А.П., МОИСЕЕВ С.Н., ОЛЕШКО В.С., ПОТАПОВ А.Н., | |||
