Изобретение относится к области систем слежения, в частности, к способам программно-корректируемого сопровождения цели и может быть использовано на подвижных объектах при проведении наблюдения, разведке, прицеливании, применении авиационных средств поражения по объектам противника.
Известен способ слежения за целью с использованием полуавтоматической системы слежения из патента РФ №35017 с датой приоритета 03.09.2003. Известный способ реализуется следующим образом: в полуавтоматическом режиме наведения оператор, наблюдая за целью через визирное устройство, устраняет видимое рассогласование линии визирования и цели путем перемещения ручки управления датчика команд в вертикальной и горизонтальной плоскостях. По каналу угла места сигнал управления последовательно поступает со второго выхода датчика команд на схему разгрузки по углу места, выход которой связан со входом интегрирующего привода угла места, выход которого кинематически связан с потенциометром и датчиком угла. Сигнал рассогласования между положением датчика угла и датчиком угла, кинематически связанного с визирным устройством по углу места, вырабатывается в сумматоре и отрабатывается угломестным приводом визирного устройства. При перемещении ручки управления датчика команд в вертикальной плоскости оператор поворачивает визирное устройство и оптическую линию визирования со скоростью, которая задается путем отклонения ручки управления датчика команд в вертикальной плоскости и пропорциональна скорости цели по углу места, устраняя тем самым видимое рассогласование между целью и перекрестием визирного устройства. По каналу азимута сигнал управления последовательно поступает с первого выхода датчика команд на схему разгрузки, выход которой связан с двумя входами потенциометра, выход которого связан с нагрузкой и входом операционного усилителя. Выход операционного усилителя связан со входом интегрирующего привода азимута, на выходе которого установлен датчик угла. Сигнал рассогласования между положением датчика и датчиком угла, кинематически связанного с визирным устройством по азимуту, вырабатывается в сумматоре и отрабатывается азимутальным приводом визирного устройства. Перемещая ручку управления в горизонтальной плоскости, оператор поворачивает визирное устройство и оптическую линию визирования со скоростью, которая задается путем отклонения ручки управления датчика команд по горизонту и пропорциональна скорости цели по азимуту, устраняя тем самым видимое рассогласование между целью и перекрестием визирного устройства, причем скорость поворота визирного устройства по азимуту связана с углом положения интегрирующего привода угла места при одном и том же угле отклонения ручки управления датчика команд по горизонту, зависимостью:

Недостатком известного способа слежения за целью с использованием полуавтоматической системы слежения является ручное устранение видимого рассогласования между целью и перекрестьем визирного устройства. Оператору необходимо вручную корректировать и управлять визиром по вертикальной и горизонтальной плоскости для полного наведения. Ручная корректировка рассогласования между целью и перекрестьем визирного устройства при частой смене целей требует от оператора большой концентрации внимания, что влечет за собой повышение утомляемости, увеличение длительности устранения видимого рассогласования между целью и перекрестьем визирного устройства, вследствие чего существенно снижается точность, приводящая к сбою сопровождения цели. Следует учитывать и высокое влияние «человеческого фактора» в целом на процесс слежения за целью с использованием полуавтоматической системы – психическое, физическое и эмоциональное состояния и возможности человека-оператора. Так, например, при излишне резком отклонении ручки управления датчика команд визир может не сразу откорректировать наведение на цель и сместиться в ином направлении, что приведет к сбою сопровождения цели.
Наиболее близким по технической сущности является способ программно-корректируемого слежения с параметрической идентификацией ошибок (Себряков Г.Г., Корсун О.Н., Бурлак Е.А. В сборнике: XII мультиконференция по проблемам управления (МКПУ-2019). Материалы XII мультиконференции. В 4-х томах. Редколлегия: И.А. Каляев, В.Г. Пешехонов [и др.]. 2019. С. 95-98, прототип), который реализуется следующим образом.
На первом этапе определяют абсолютную величину угловой скорости в соответствии с выражением 
где λ – угол между векторами D и V, d=|D|,
D(t) – вектор дальности;
V(t) – вектор относительной скорости;
I(t) – вектор относительного ускорения.
На втором этапе в число первичных факторов, вызывающих погрешности в программном развороте визира, включаются ошибки определения начального превышения летательного аппарата над целью ΔH, начальных ошибок определения дальности до цели ΔX и бокового отклонения от цели ΔZ, при этом вводят вектор погрешностей:

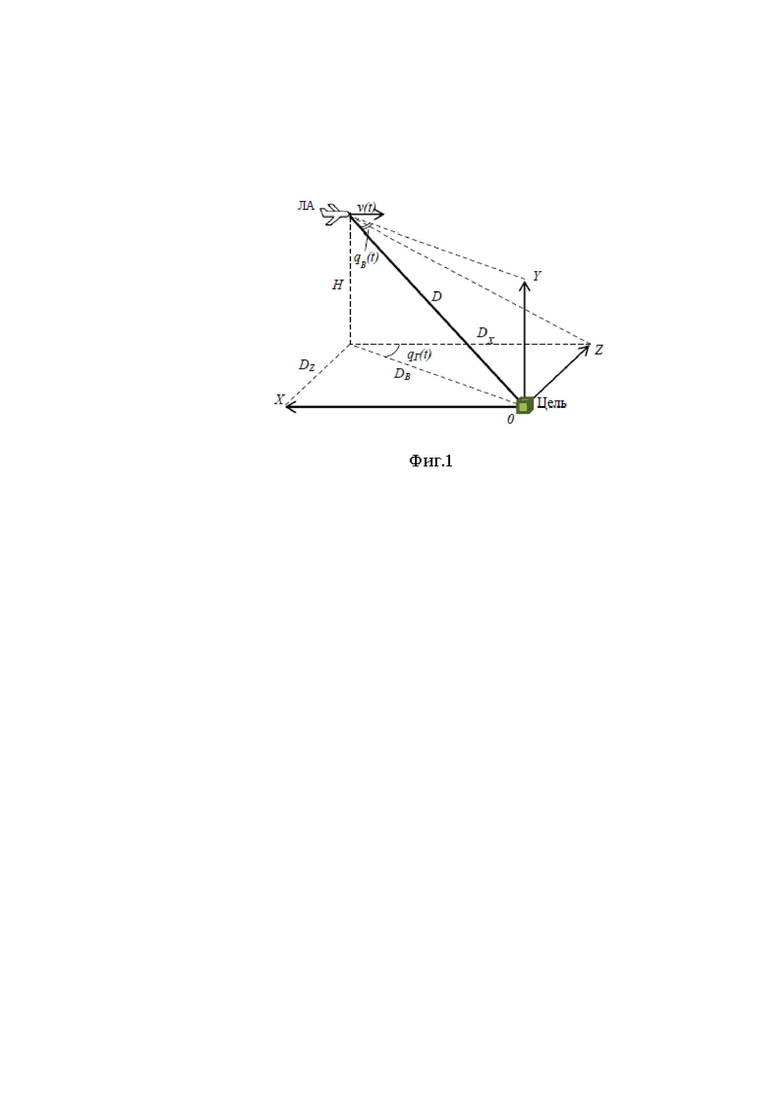
На фиг.1 представлена схема слежения, где qВ(t) – угол визирования в вертикальной плоскости, проходящей через цель и летательный аппарат, qГ(t) – угол визирования в горизонтальной плоскости, представляющей проекции цели и летательного аппарата на поверхность, H – превышение летательного аппарата над целью, D – дальность до цели, Dx, Dz – проекции дальности до цели по соответствующим осям, Dв – проекция дальности на поверхность. При этом выражения для корректировки углов визирования:
Расчетные углы визирования вычисляют по формулам:
 ,
,

Моделируемые углы визирования рассчитывают по формулам:


При этом вектор ошибок aT= [ΔH ΔX ΔZ]T идентифицируют путем минимизации функционала:
J
На третьем этапе оператору ставится задача коррекции в начале слежения в течение 2-5 секунд. Далее при наличии корректировок оператора получают оценку вектора ошибок программы корректировки визира путем параметрической идентификации. При этом параметрическую идентификацию предлагается провести методом идентификации по максимуму правдоподобия (Булгаков, В.В. Алгоритмы повышения точности расчета углов ориентации летательного аппарата / В.В. Булгаков, О.Н. Корсун, В.С. Кулабухов, А.В. Стуловский, Д.С. Тимофеев // Известия Российской академии наук. Теория и системы управления. – 2016. – № 1. – С. 159).
Недостатком предложенного способа является необходимость вмешательства оператора для осуществления коррекции в начале слежения в течение 2-5 секунд, что влечет за собой последствия, связанные с «человеческим фактором»: снижение точности слежения, возможные сбои и т.д.
Технической проблемой, решение которой обеспечивается при использовании предлагаемого способа, является осуществление программно-корректируемого сопровождения цели посредством разворота оптико-электронной системы, установленной на воздушном судне в автоматическом режиме в условиях ограниченного объема фактически имеющейся измерительной информации.
Технические результаты заявляемого решения заключаются:
- в значительном повышении эффективности проведения оптической разведки и прицеливания по объекту;
- в повышении надежности и точности слежения за целью с помощью оптико-электронной системы;
- в автоматизации управления оптико-электронной системой и минимизации ошибок управления;
- в упрощении и ускорении процесса обработки информации.
Данные технические результаты достигаются за счет того, что способ программно-корректируемого сопровождения цели предусматривает регистрацию измерительной информации с бортовой системы дальней и ближней навигации, оптико-электронной системы, органа управления оптической системы установленных на воздушном судне.
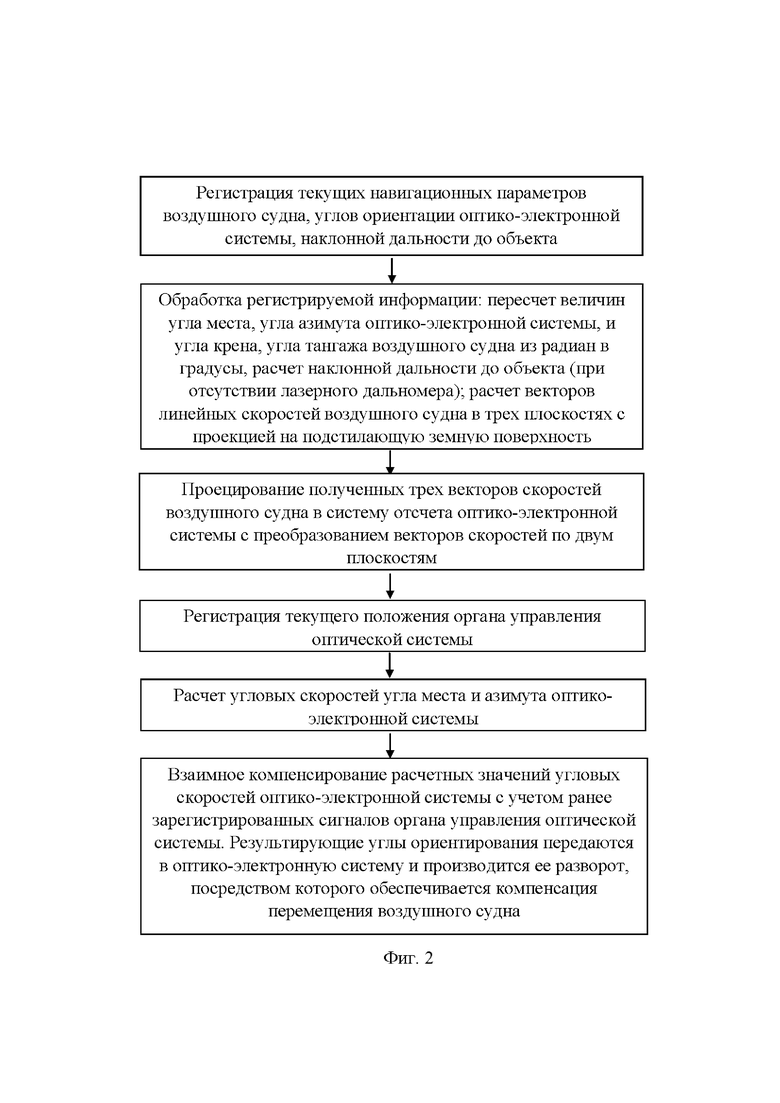
На первом этапе от бортового оборудования выполняется регистрация текущих навигационных параметров воздушного судна, углов ориентации оптико-электронной системы, наклонной дальности до объекта (при наличии лазерного дальномера).
На втором этапе выполняется обработка регистрируемой информации. Осуществляется пересчет величин угла места, угла азимута оптико-электронной системы, и угла крена, угла тангажа воздушного судна из радиан в градусы, расчет наклонной дальности до объекта (при отсутствии лазерного дальномера). Производится расчет векторов линейных скоростей воздушного судна в трех плоскостях с проекцией на подстилающую земную поверхность.
На третьем этапе выполняется проецирование полученных трех векторов скоростей воздушного судна в систему отсчета оптико-электронной системы с преобразованием векторов скоростей по двум плоскостям.
На четвертом этапе выполняется регистрация текущего положения органа управления оптической системы.
На пятом этапе производится расчет угловых скоростей угла места и азимута оптико-электронной системы.
На шестом этапе выполняется взаимное компенсирование расчетных значений угловых скоростей оптико-электронной системы с учетом ранее зарегистрированных сигналов органа управления оптической системы. Результирующие углы ориентирования передаются в оптико-электронную систему, и производится ее разворот, посредством которого обеспечивается компенсация перемещения воздушного судна.
Для целей настоящего описания под термином «оптико-электронная система» понимают приборы или системы, в которых информация об исследуемом или наблюдаемом объекте переносится оптическим излучением или содержится в оптическом сигнале, а ее первичная обработка сопровождается преобразованием энергии излучения в электрическую энергию.
На фиг. 2 представлена последовательность действий для осуществления способа программно-корректируемого сопровождения цели.
Описание осуществления изобретения может быть использовано в качестве примера для лучшего понимания его сущности и изложено со ссылками на фигуру, приложенную к настоящему описанию. При этом приведенные ниже подробности призваны не ограничить сущность изобретения, а сделать ее более ясной.
Рассмотрим реализацию предлагаемого способа на примере осуществления способа программно-корректируемого сопровождения цели для оптико-электронной системы, установленной на воздушном судне, в условиях наличия исходной информации.
Решение данной задачи осуществляется следующим образом. Выполняется регистрация измерительной информации и формируется массив данных, на основе которого осуществляются нижеприведенные операции. Регистрацию измерительной информации осуществляют устройства, установленные на воздушном судне (далее – ВС): система дальней навигации, например, бесплатформенная инерциальная система (далее – БИНС), система ближней навигации, например, радиовысотомер, оптико-электронная система (далее – ОЭС). Для сохранения ручной корректировки разворота оптико-электронной системы, предусмотрено орган управления ОЭС – джойстик.
На первом этапе выполняется регистрация необходимых параметров для выполнения последующих этапов.
Данные, регистрирующиеся в БИНС:
Данные, регистрирующиеся в ОЭС:

Данные, регистрирующиеся в радиовысотомер:

Данные, получаемые с джойстика:

Данные о наклонной дальности до объекта регистрируются либо лазерным дальномером, либо рассчитываются во втором этапе через общеизвестные методы расчета длины вектора линии визирования по углам ориентации оптико-электронной системы, высоте и матрице высот и т.д.

Далее проводится обработка полученной измерительной зарегистрированной информации.
Для последующих последовательных тригонометрических преобразований и построений соответствующих проекций, необходимо ввести системы координат, в которых и будут осуществляться данные операции:

На втором этапе осуществляется пересчет величин угла места β и угла азимута α ОЭС, угла крена γ и угла тангажа θ ВС из радиан в градусы. При отсутствии лазерного дальномера выполняется расчет наклонной дальности до объекта. Затем последовательно строятся проекции векторов линейной скорости ВС:
1) Построение проекций поперечной и вертикальной линейных скоростей ВС по крену θ (4):

2) Построение проекций продольной и вертикальной с учетом продольной линейных скоростей ВС по тангажу γ (5), используя уравнение (12) получим:

На третьем этапе, продолжая геометрические преобразования, получаются проекции скорости на оси системы координат, связанной с системой координат ОЭС:
3) Построение линейной скорости по азимуту ОЭС α (6), на основе уравнений (11) и (13):

4) Построение проекции линейной скорости по углу места ОЭС β (7) на основе уравнений (14) и (16):

На четвертом этапе выполняется регистрация текущего отклонения джойстика.
На пятом этапе отклонение джойстика пересчитывается в угловую скорость оптико-электронной системы. Для этого используется принятый закон управления, в соответствии с которым, угол отклонения джойстика пересчитывается в угловую скорость оптико-электронной системы  , по углу места и азимуту соответственно.
, по углу места и азимуту соответственно.
На шестом этапе после выполнения соответствующих тригонометрических преобразований, рассчитываются угловые скорости – угла места и азимута, на основе полученных уравнений (16) - (17):

При подстановке в уравнения (18) – (19), соответствующих уравнений (16) – (17) вычисляются итоговые значения угловых скоростей ОЭС – угла места, угла азимута – ωум, ωаз.
Далее, полученные угловые скорости ωум, ωаз передаются в оптико-электронную систему и обеспечивают ее разворот для компенсации перемещения воздушного судна.
Предлагаемый способ повышает эффективность управления оптико-электронной системы за счет снижения требований по выставляемым характерным положениям и разворотам оптико-электронной системы, позволяющее проводить программно – корректируемое слежение из любого начального состояния оптико-электронной следящей системы, повышает точность слежения за областью интереса из-за высокой точности вычисления угловых скоростей по углу места и азимута, упрощает и ускоряет процесс обработки информации за счет постоянной регистрации измерительной информации с навигационных систем воздушного судна и оптико-электронной системы, установленной на воздушном судне. При этом на первом этапе формируется массив данных, включающий в себя продольную, поперечную, вертикальную скорости и истинную высоту воздушного судна над подстилающей поверхностью, углы элевации воздушного судна, длина вектора линии визирования, угол азимута и угол места оптико-электронной системы. На втором этапе осуществляется пересчет величин углов оптико-электронной системы и углов элевации воздушного судна из радиан в градусы. Производится расчет наклонной дальности до объекта (при отсутствии лазерного дальномера) и расчет векторов линейных скоростей воздушного судна в трех плоскостях с проекцией на подстилающую земную поверхность. На третьем этапе выполняется проецирование векторов линейной скорости воздушного судна в систему отсчета оптико-электронной системы. На четвертом этапе выполняется регистрация информации органа управления оптической системы. На пятом этапе происходит преобразование управляющего сигнала с органа управления и расчет угловых скоростей оптико-электронной системы. На шестом этапе скомпенсированные значения угловых скоростей угла места и азимута передаются в оптико-электронную систему, и производится ее разворот, посредством которого обеспечивается компенсация перемещения воздушного судна.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЦЕЛЕУКАЗАНИЯ ПО НАПРАВЛЕНИЮ СИСТЕМЕ НАВЕДЕНИЯ УПРАВЛЯЕМОГО ОБЪЕКТА | 2020 |
|
RU2751433C1 |
| СПОСОБ СКАНИРОВАНИЯ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ ПО КУРСУ | 2020 |
|
RU2755650C1 |
| СПОСОБ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ МЕСТОПОЛОЖЕНИЯ НАЗЕМНОГО (НАДВОДНОГО) ОБЪЕКТА | 2020 |
|
RU2749194C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО НАВЕДЕНИЯ ОРУЖИЯ НА ПОДВИЖНУЮ ЦЕЛЬ | 2014 |
|
RU2555643C1 |
| СПОСОБ АВТОМАТИЗАЦИИ ЦЕЛЕУКАЗАНИЯ ПРИ ПРИЦЕЛИВАНИИ НА ВЕРТОЛЕТНОМ КОМПЛЕКСЕ | 2018 |
|
RU2697939C1 |
| АЭРОДРОМНЫЙ АВТОМАТИЗИРОВАННЫЙ КОМПЛЕКС МОНИТОРИНГА, УПРАВЛЕНИЯ И ДЕМОНСТРАЦИИ ПОЛЕТОВ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2010 |
|
RU2426074C1 |
| Оптико-пеленгационная система кругового обзора | 2020 |
|
RU2748872C1 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СО СЛЕДЯЩИМ ДАЛЬНОМЕРОМ | 2009 |
|
RU2410629C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ВОЗДУШНОЙ ЦЕЛИ И ОПТИЧЕСКИЙ ПРИЦЕЛ СО СЛЕДЯЩИМ ДАЛЬНОМЕРОМ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2549552C2 |
| СПОСОБ ДОСТАВКИ НА ТОЧЕЧНУЮ ЦЕЛЬ ИЗЛУЧЕНИЯ ЛАЗЕРНОГО ДАЛЬНОМЕРА | 2019 |
|
RU2724240C1 |
Изобретение относится к области систем слежения, в частности, к способам программно-корректируемого сопровождения цели и может быть использовано на подвижных объектах при проведении наблюдения, разведке, прицеливании, применении авиационных средств поражения по объектам противника. Способ программно-корректируемого сопровождения цели характеризуется тем, что на первом этапе регистрацию измерительной информации с бортовой системы дальней и ближней навигации, оптико-электронной системы, органа управления оптической системы установленных на воздушном судне, при этом выполняется регистрация текущих навигационных параметров воздушного судна, углов ориентации оптико-электронной системы, включая наклонную дальность до объекта при наличии лазерного дальномера. На втором этапе обработку регистрируемой информации, при этом осуществляется пересчет величин угла места, угла азимута оптико-электронной системы, и угла крена, угла тангажа воздушного судна из радиан в градусы и расчет наклонной дальности до объекта при отсутствии лазерного дальномера, далее производится расчет векторов линейных скоростей воздушного судна в трех плоскостях с проекцией на подстилающую земную поверхность. На третьем этапе проецирование полученных трех векторов скоростей воздушного судна в систему отсчета оптико-электронной системы с преобразованием векторов скоростей по двум плоскостям. На четвертом этапе осуществляют регистрацию текущего положения органа управления оптической системы. На пятом этапе расчет угловых скоростей угла места и азимута оптико-электронной системы. На шестом этапе взаимное компенсирование расчетных значений угловых скоростей оптико-электронной системы с учетом ранее зарегистрированных сигналов органа управления оптической системы; при этом результирующие углы ориентирования передаются в оптико-электронную систему, и производится ее разворот, посредством которого обеспечивается компенсация перемещения воздушного судна. Технический результат – обеспечение автоматизации управления оптико-электронной системой и минимизации ошибок управления. 2 ил.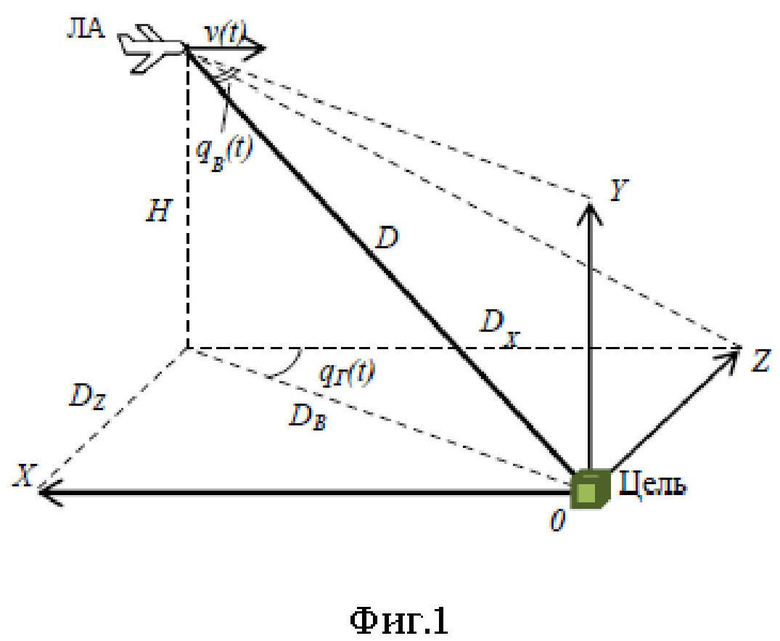
Способ программно-корректируемого сопровождения цели, предусматривающий на первом этапе регистрацию измерительной информации с бортовой системы дальней и ближней навигации, оптико-электронной системы, органа управления оптической системы, установленных на воздушном судне; при этом выполняется регистрация текущих навигационных параметров воздушного судна, углов ориентации оптико-электронной системы, включая наклонную дальность до объекта при наличии лазерного дальномера; на втором этапе обработку регистрируемой информации; при этом осуществляется пересчет величин угла места, угла азимута оптико-электронной системы, и угла крена, угла тангажа воздушного судна из радиан в градусы и расчет наклонной дальности до объекта при отсутствии лазерного дальномера; производится расчет векторов линейных скоростей воздушного судна в трех плоскостях с проекцией на подстилающую земную поверхность; на третьем этапе проецирование полученных трех векторов скоростей воздушного судна в систему отсчета оптико-электронной системы с преобразованием векторов скоростей по двум плоскостям; на четвертом этапе регистрацию текущего положения органа управления оптической системы; на пятом этапе расчет угловых скоростей угла места и азимута оптико-электронной системы; на шестом этапе взаимное компенсирование расчетных значений угловых скоростей оптико-электронной системы с учетом ранее зарегистрированных сигналов органа управления оптической системы; при этом результирующие углы ориентирования передаются в оптико-электронную систему, и производится ее разворот, посредством которого обеспечивается компенсация перемещения воздушного судна.
| СПОСОБ НАВЕДЕНИЯ МНОГОЦЕЛЕВОГО ВЫСОКОТОЧНОГО ОРУЖИЯ ДАЛЬНЕЙ ЗОНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2399854C1 |
| СПОСОБ АВТОМАТИЗАЦИИ ЦЕЛЕУКАЗАНИЯ ПРИ ПРИЦЕЛИВАНИИ НА ВЕРТОЛЕТНОМ КОМПЛЕКСЕ | 2018 |
|
RU2697939C1 |
| ЛЕГКИЙ СВЕРХЗВУКОВОЙ МНОГОЦЕЛЕВОЙ САМОЛЕТ | 2004 |
|
RU2271305C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО НАВЕДЕНИЯ ОРУЖИЯ НА ПОДВИЖНУЮ ЦЕЛЬ | 2014 |
|
RU2555643C1 |
| US 7920943 B2, 05.04.2011. | |||

