Изобретение относится к области гидроакустики и может быть использовано при обработке сигнала шумоизлучения объекта в гидроакустических системах для решения задачи локализации объекта по глубине его погружения.
При обработке шумового сигнала объекта в гидроакустических системах важное место занимает задача локализации объекта в пространстве, под которой понимают определение одной или нескольких из координат положения объекта: направление на объект, расстояние до объекта и глубина погружения объекта.
Глубина шумящего объекта традиционно определяется совместно с расстоянием до него. Это физически обосновано тем, что в рамках лучевой теории распространения звука в морской среде положение источника сигнала в пространстве «расстояние-глубина» однозначно определяется совокупностью пар параметров, измеренных в точке приема, а именно углами прихода лучей в вертикальной плоскости и временами их хода.
Известны способы совместного определения расстояния и глубины [Баронкин В.М., Галкин О.П., Гладилин А.В., Микрюков А.В., Попов О.Е. Патент РФ №2602732 от 25.06.2015. Способ пассивного определения координат шумящего в море объекта. МПК G01S 3/80; Зеленкова И.Д., Афанасьев А.Н., Корецкая А.С. Патент РФ №2740169 от 23.07.2020. Способ определения координат морской шумящей цели. СПК G01S 15/00; Зеленкова И.Д., Корецкая А.С. Патент РФ №2764386 от 05.04.2021. Способ пассивного определения координат шумящего в море объекта. СПК G01S 3/80], основанные на указанной физической зависимости. Однако, для реализации этих способов необходимо использовать довольно большую гидроакустическую антенну, развитую в вертикальной плоскости, для возможности формирования достаточно узких характеристик направленности, поскольку известно [Смарышев М.Д., Добровольский Ю.Ю. Гидроакустические антенны. Л. Судостроение. 1984], что ширина характеристики направленности обратно пропорциональна длине антенны. Это ограничивает условия применения указанных способов по габаритам носителя и стоимости разработки.
Известны способы совместного определения расстояния и глубины [Машошин А.И., Мельканович B.C. Патент РФ №2690223 от 28.08.2018. Способ определения координат морской шумящей цели. СПК G01S 15/00; Гриненков А.В., Машошин А.И., Мельканович B.C. Патент РФ №2724962 от 27.11.2019. Способ определения координат морской шумящей цели. СПК G01S 15/00], в которых предлагается ограничиться рассмотрением задержки по времени хода пар лучей, без определения углов их прихода. Это позволяет не формировать узкие характеристики направленности в вертикальной плоскости, а значит использовать антенну меньших размеров. Однако, задержка по времени хода пар лучей однозначно зависит только от глубины погружения объекта, а не от расстояния до него. Это связано с циклическим ходом лучей при дальнем распространении звука в условиях глубокого моря [Какалов В.А. О реализации согласованной со средой фильтрации гидроакустического сигнала от источника // Гидроакустика. 2021, Вып. 45(1) С. 22-30]. Возникает многозначность решения по расстоянию, которую в этих способах предлагается устранять введением дополнительных процедур, реализующих, по существу, способы определения расстояния, основанные на других физических принципах. Введение дополнительных процедур сильно усложняет способы, и увеличивает необходимые вычислительные ресурсы. Это ограничивает условия применения указанных способов по требованиям к ресурсам ЦВК, и как следствие, по габаритам носителя и стоимости разработки.
С учетом того, что известны простые способы определения расстояния до шумящего объекта, например [Волкова А.А., Консон А.Д. Потенциальные возможности двухчастотного метода оценки расстояния // Гидроакустика. 2009. №9. С. 43-51], было бы полезно иметь способ определения только глубины, реализуемый на антенне небольших габаритов при малых вычислительных затратах.
Наиболее близким аналогом по количеству общих процедур к предлагаемому изобретению является способ локализации шумящего в море объекта [Бурдик B.C. Анализ гидроакустических систем. - Л.: Судостроение, 1988 г., с. 377-381].
Способ включает:
- обнаружение на выходе шумопеленгатора широкополосного сигнала шумящего в море объекта;
- измерение его автокорреляционной функции (АКФ);
- обнаружение в ней наиболее интенсивного корреляционного максимума (КМ), исключая глобальный максимум в начале координат, и измерение его абсциссы, представляющей собой измеренную задержку по времени хода пары лучей;
- вычисление разности длин траекторий распространения звука от шумящего в море объекта до точки приема как произведение значения абсциссы КМ и средней скорости звука в воде;
- по известной глубине погружения приемной антенны, глубине моря и вычисленному значению разности длин траекторий распространения звука вычисление расстояния до шумящего в море объекта.
Способ осуществляет локализацию объекта по расстоянию, прост в реализации, не требует значительных вычислительных ресурсов и не требует измерения угла прихода сигнала.
Недостатком способа является использование в расчетах среднего значения скорости звука в воде, в то время как скорость звука изменяется в зависимости от глубины. При распространении звука в слоисто-неоднородной среде происходит рефракция - искривление траектории распространения звуковых лучей. Приемлемая точность определения расстояния до шумящего в море объекта без учета рефракции звуковых лучей в реальных условиях может быть обеспечена только в мелком море на небольших расстояниях между шумящим объектом и принимающей антенной. А в глубоком море на больших расстояниях используемая в способе функциональная зависимость расстояния от значения абсциссы КМ, которая является задержкой по времени хода пары лучей, не выполняется, и способ оказывается неприменим. Кроме того, функциональная зависимость расстояния от значения абсциссы КМ, используемая в способе, верна только для надводных объектов, когда глубину погружения можно принять равной нулю. Для объектов, находящихся в толще воды, звуковые лучи распространяются по другим траекториям, и определение расстояния указанным способом принципиально невозможно. Наоборот, известно [Какалов В.А. О реализации согласованной со средой фильтрации гидроакустического сигнала от источника // Гидроакустика. 2021, Вып. 45(1) С. 22-30], что задержка по времени хода пар лучей однозначно зависит только от глубины погружения объекта, а не от расстояния до него.
Задачей изобретения является модернизация способа локализации шумящего в море объекта таким образом, чтобы он стал работоспособен в реальных гидроакустических условиях для объектов, находящихся в толще воды.
Для достижения поставленной задачи в способ локализации шумящего в море объекта, в котором осуществляют обнаружение на выходе шумопеленгатора широкополосного сигнала шумящего в море объекта, измеряют его автокорреляционную функцию, обнаруживают в ней наиболее интенсивный корреляционный максимум, исключая глобальный максимум в начале координат, и находят его абсциссу, представляющую собой измеренную задержку по времени хода пары лучей введены новые признаки, а именно: предварительно формируют таблицу зависимости задержек от глубины погружения шумящего в море объекта в текущих гидролого-акустических условиях, для чего измеряют скорость звука в воде в зависимости от глубины, формируют лучевую структуру сигнала на входе антенны для набора возможных положений шумящего объекта по сетке «расстояние-глубина», вычисляют для каждого возможного положения шумящего объекта из этого набора расчетную задержку по времени хода пары наиболее интенсивных лучей, пришедших на вход антенны под близкими углами, и объединяют расчетные задержки, полученные для совокупности расстояний на одной глубине, в единую ячейку таблицы путем формирования среднего значения, а после получения измеренной задержки выбирают из таблицы соответствующую ей глубину погружения шумящего в море объекта.
Техническим результатом предложенного изобретения является обеспечение локализации шумящего объекта по глубине его погружения в условиях реального океанического волновода. При этом способ работает без измерения угла прихода сигнала в вертикальной плоскости, что позволяет не формировать характеристику направленности, а значит использовать антенну небольших размеров.
Покажем возможность достижения указанного технического результата предложенным способом.
В предлагаемом способе введены процедуры измерения скорости звука в воде в зависимости от глубины и формирования лучевой структуры сигнала, которые в совокупности позволяют учитывать при локализации объекта реальные условия океанического волновода. При этом, расчет основного анализируемого параметра, а именно задержки по времени хода пары лучей, осуществляется для сетки «расстояние-глубина», что позволяет использовать способ в условиях обнаружения шумящего объекта в большом диапазоне его возможных положений, как по расстоянию, так и по глубине. Это отличает предлагаемый способ в положительную сторону от наиболее близкого способа-аналога, который работоспособен только в ограниченных условиях мелкого моря на малых расстояниях при постоянстве скорости звука и при нулевой глубине погружения объекта.
Кроме того, все наиболее ресурсоемкие в вычислительном плане процедуры способа выполняются однократно, что выгодно отличает предлагаемый способ от способов аналогов. При этом, совокупность указанных процедур, имеющих конечной целью формирование таблицы зависимости задержек именно от глубины, позволяет исключить многозначность зависимости задержек от расстояния. Тогда, отказ от определения расстояния позволяет использовать в способе именно задержку по времени хода пары лучей в качестве основного и единственного анализируемого параметра без определения угла прихода сигнала, что, в свою очередь, позволяет применять способ для гидроакустических антенн неразвитых в вертикальной плоскости.
Таким образом, получаем способ, работоспособный в условиях реального океанического волновода для большого диапазона возможных положений шумящего объекта, как по расстоянию, так и по глубине. При этом, разработанный способ прост в реализации и может быть реализован для антенн небольших размеров.
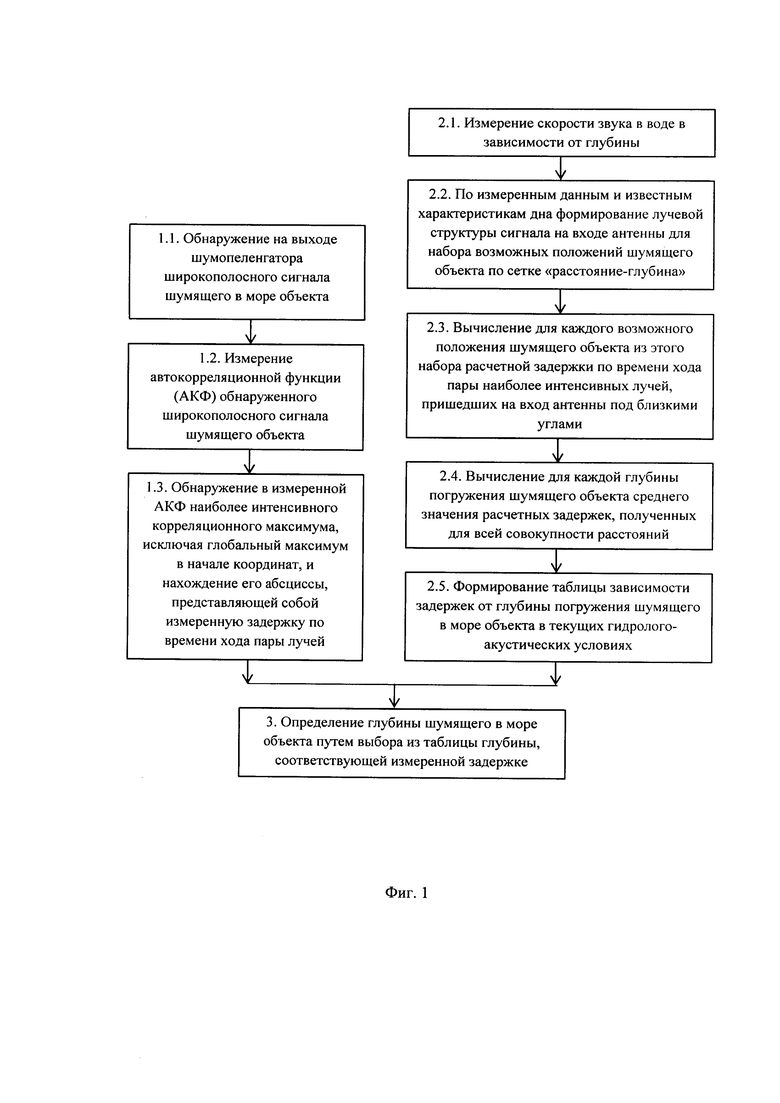
Сущность изобретения поясняется фиг.1, где приведена блок - схема обработки сигналов в соответствии с предлагаемым способом.
При реализации способа (фиг. 1) обработка ведется на первоначальном этапе двумя параллельными ветвями.
Первая ветвь включает в себя последовательно выполняемые операции: обнаружение на выходе шумопеленгатора широкополосного сигнала шумящего в море объекта (блок 1.1); измерение АКФ обнаруженного широкополосного сигнала шумящего объекта (блок 1.2); обнаружение в измеренной АКФ наиболее интенсивного корреляционного максимума, исключая глобальный максимум в начале координат, и нахождение его абсциссы, представляющей собой измеренную задержку по времени хода пары лучей (блок 1.3).
Выполнение перечисленных операций обеспечивает измерение задержки, используемой для выбора соответствующей ей глубины из таблицы зависимости задержек от глубины погружения шумящего объекта, сформированной блоками второй ветви.
Вторая ветвь включает в себя операции: измерение скорости звука в воде в зависимости от глубины (блок 2.1); по измеренным данным и известным характеристикам дна формирование лучевой структуры сигнала на входе антенны для набора возможных положений шумящего объекта по сетке «расстояние-глубина» (блок 2.2); вычисление для каждого возможного положения шумящего объекта из этого набора расчетной задержки по времени хода пары наиболее интенсивных лучей, пришедших на вход антенны под близкими углами (блок 2.3); вычисление для каждой глубины погружения шумящего объекта среднего значения расчетных задержек, полученных для всей совокупности расстояний (блок 2.4); формирование таблицы зависимости задержек от глубины погружения шумящего в море объекта в текущих гидролого-акустических условиях (блок 2.5).
Операции второй ветви могут быть выполнены однократно для текущего состояния гидролого-акустических условий, определяющего лучевую структуру сигналов.
Выполнение операций второй ветви обеспечивает формирование таблицы зависимости задержек от глубины погружения шумящего в море объекта в текущих гидролого-акустических условиях.
Определение глубины шумящего в море объекта выполняется путем выбора из таблицы глубины, соответствующей измеренной задержке (блок 3).
Предложенный способ может быть реализован посредством известной в гидроакустике аппаратуры, например гидроакустическая антенна известна из [Литвиненко С.Л. Патент РФ №2515133 от 13.11.2012. Сферическая гидроакустическая антенна. МПК G01S 15/00], при этом антенные модули могут быть выполнены согласно [Смарышев М.Д., Черняховский А.Е., Иванов A.M., Шатохин А.В., Селезнев И.А., Никандров В.А., Маляров К.В., Барсуков Ю.В. Патент РФ №2539819 от 24.10.2013. Антенный модуль с цифровым выходом. МПК H04R 1/44].
Гидроакустические измерители скорости звука в воде являются известными устройствами, они серийно выпускаются и устанавливаются совместно с гидроакустической аппаратурой [Комляков В.А. Корабельные средства измерения скорости звука и моделирование акустических полей в океане. - СПб.: Наука, 2003 г., с. 169-227].
Формирование лучевой структуры сигнала на входе антенны может быть выполнено согласно [Авилов К.В., Добряков Н.А., Попов О.Е. Комплекс программных средств для вычисления звуковых полей в морской среде, неоднородной по глубине и трассе распространения //Акустика океана. Доклады X школы-семинара акад. Л.М. Бреховских. М.: ГЕОС, 2004. С. 27].
При вычислении расчетной задержки по времени хода пары наиболее интенсивных лучей среди всех пар лучей, модуль разности углов прихода которых составляет не более 4-х градусов, выбирается пара лучей с наибольшей суммарной интенсивностью. Задержка по времени хода вычисляется как модуль разности времен распространения этих лучей.
При формировании таблицы зависимости задержек от глубины погружения шумящего в море объекта в текущих гидролого-акустических условиях в первую строку таблицы записываются возможные глубины погружения шумящего объекта, а во вторую - средние значения расчетных задержек, полученных для всей совокупности расстояний.
После измерения задержки в АКФ сигнала, по второй строке таблицы выполняется поиск наиболее близкой задержки и определяется соответствующая ей глубина.
Все изложенное позволяет считать задачу изобретения решенной.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения глубины погружения шумящего в море объекта | 2023 |
|
RU2816481C1 |
| Способ локализации в пространстве шумящего в море объекта | 2023 |
|
RU2816480C1 |
| Способ получения информации о подводном шумящем объекте | 2022 |
|
RU2803528C1 |
| Способ определения координат морской шумящей цели | 2022 |
|
RU2798416C1 |
| Способ пассивного определения координат шумящего в море объекта | 2022 |
|
RU2797780C1 |
| Способ определения координат шумящих объектов с использованием вертикально развитых бортовых антенн гидроакустических комплексов | 2023 |
|
RU2820807C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ШУМЯЩИХ МОРСКИХ ОБЪЕКТОВ | 2022 |
|
RU2810106C2 |
| Способ пассивного определения координат шумящего объекта | 2022 |
|
RU2798390C1 |
| Способ определения класса объекта, обнаруженного шумопеленгаторной станцией | 2023 |
|
RU2835874C1 |
| Способы определения координат морской шумящей цели | 2022 |
|
RU2797161C1 |
Использование: изобретение относится к области гидроакустики, а именно к способам и устройствам локализации шумящих в море объектов по их шумоизлучению, и может быть использовано для решения задачи определения глубины погружения шумящего в море объекта. Сущность: в способе предварительно формируют таблицу зависимости задержек от глубины погружения шумящего в море объекта в текущих гидролого-акустических условиях. Для этого измеряют скорость звука в воде в зависимости от глубины, формируют лучевую структуру сигнала на входе антенны для набора возможных положений шумящего объекта по сетке расстояние × глубина, вычисляют для каждого возможного положения шумящего объекта из этого набора расчетную задержку по времени хода пары наиболее интенсивных лучей, пришедших на вход антенны под близкими углами, и объединяют расчетные задержки, полученные для совокупности расстояний на одной глубине в единую ячейку таблицы путем формирования среднего значения. Определение глубины погружения шумящего объекта выполняется после измерения задержки в автокорреляционной функции принятого сигнала путем выбора из таблицы соответствующей ей глубины. Технический результат: обеспечение локализации шумящего объекта по глубине его погружения в условиях реального океанического волновода. При этом способ работает без измерения угла прихода сигнала в вертикальной плоскости, что позволяет не формировать характеристику направленности, а значит использовать антенну небольших размеров. 1 ил. 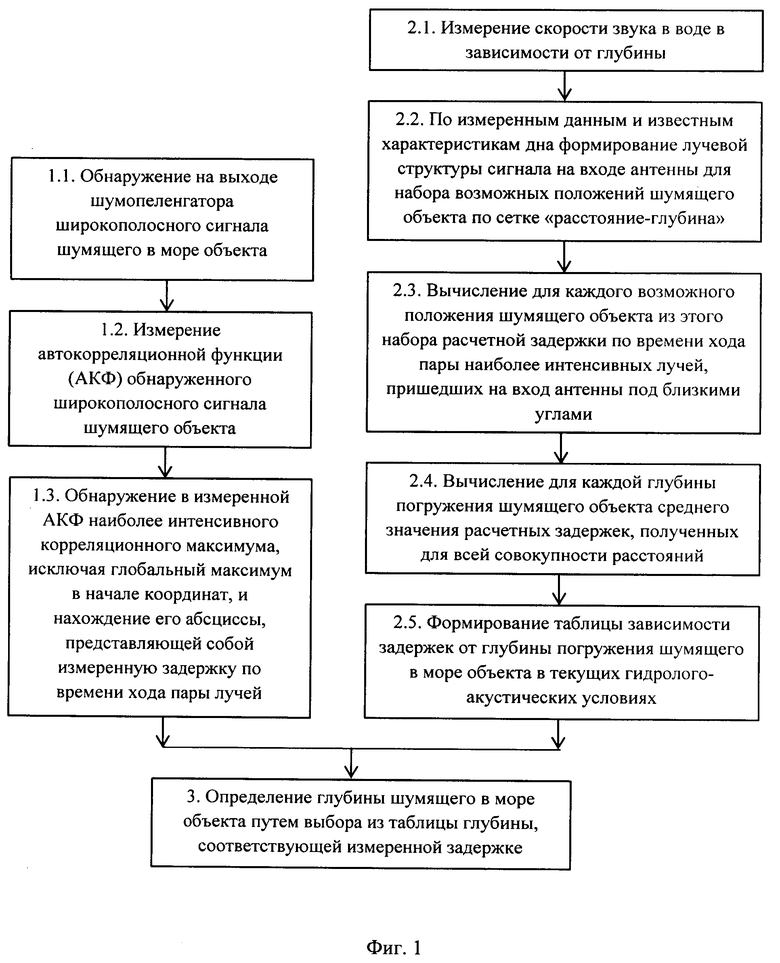
Способ локализации шумящего в море объекта, включающий обнаружение на выходе шумопеленгатора широкополосного сигнала шумящего в море объекта, измерение его автокорреляционной функции, обнаружение в ней наиболее интенсивного корреляционного максимума, исключая глобальный максимум в начале координат, и нахождение его абсциссы, представляющей собой измеренную задержку по времени хода пары лучей, в котором: предварительно формируют таблицу зависимости задержек от глубины погружения шумящего в море объекта в текущих гидролого-акустических условиях, для чего измеряют скорость звука в воде в зависимости от глубины, формируют лучевую структуру сигнала на входе антенны для набора возможных положений шумящего объекта по сетке «расстояние-глубина», вычисляют для каждого возможного положения шумящего объекта из этого набора расчетную задержку по времени хода пары наиболее интенсивных лучей, пришедших на вход антенны под близкими углами, и объединяют расчетные задержки, полученные для совокупности расстояний на одной глубине, в единую ячейку таблицы путем формирования среднего значения, а после получения измеренной задержки выбирают из таблицы соответствующую ей глубину погружения шумящего в море объекта.
| Какалов В.А | |||
| О реализации согласованной со средой фильтрации гидроакустического сигнала от источника // Гидроакустика | |||
| Способ регенерирования сульфо-кислот, употребленных при гидролизе жиров | 1924 |
|
SU2021A1 |
| Железобетонный фасонный камень для кладки стен | 1920 |
|
SU45A1 |
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
| СПОСОБ ОЦЕНКИ ДИСТАНЦИИ ДО ШУМЯЩЕГО В МОРЕ ОБЪЕКТА | 2013 |
|
RU2559310C2 |
| СПОСОБ ПАССИВНОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ ШУМЯЩЕГО В МОРЕ ОБЪЕКТА | 2015 |
|
RU2602732C1 |
| Способ и устройство обнаружения шумящих в море объектов бортовой антенной | 2019 |
|
RU2723145C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДИСТАНЦИИ ДО ШУМЯЩЕГО ОБЪЕКТА | 2014 |
|
RU2550576C1 |
| US 5805525 A1, 08.09.1998. | |||

