Изобретение относится к устройствам для взаимодействия пользователя с программными интерфейсами, в том числе реализованных посредством технологии виртуальной реальности [G06F13/00, A63G31/16, A63F9/24].
Из уровня техники известно УСТРОЙСТВО ДЛЯ ПОГРУЖЕНИЯ В ВИРТУАЛЬНУЮ РЕАЛЬНОСТЬ [RU2109336, опубл. 20.04.1998], содержащее средство формирования виртуального пространства, в котором объекты возникают и перемещаются заданным и случайным образом, к которому подключены средство отображения виртуального пространства пользователю и блок преобразования виртуального пространства в соответствии с реальными физическими движениями руки, ноги, головы, туловища и глаз пользователя в реальном пространстве с учетом взаимодействия с объектами в виртуальном пространстве, отличающееся тем, что содержит замкнутую оболочку, ограничивающую реальное замкнутое пространство, размещенную на опоре с возможностью вращения вокруг своего центра, отверстие, выполненное в оболочке и снабженное крышкой для входа и выхода пользователя, средство определения величины и направления перемещения пользователя относительно оболочки, подключенное к блоку преобразования виртуального пространства.
Наиболее близким по технической сущности является УСТРОЙСТВО ДЛЯ ПОГРУЖЕНИЯ В ВИРТУАЛЬНУЮ РЕАЛЬНОСТЬ [RU2109337, опубл. 20.04.1998], содержащее средство формирования виртуального пространства, в котором объекты возникают и перемещаются заданным и случайным образом, к которому подключены средство отображения виртуального пространства пользователю и блок преобразования виртуального пространства в соответствии с реальными физическими движениями руки, ноги, головы, туловища и глаз пользователя в реальном пространстве с учетом взаимодействия с объектами в виртуальном пространстве, отличающееся тем, что содержит площадку для скольжения, предназначенную для совершения пользователем шагательных движений в любом направлении при взаимодействии с объектами виртуального пространства, датчик определения количества, величины и направления шагательных движений, совершенных пользователем по площадке относительно начальной точки отсчета, размещенный в непосредственной близости от пользователя, блок управления, который соединен со средством формирования виртуального пространства и к входу которого подключен датчик определения количества, величины и направления шагов, и средство для компенсации движений ног пользователя по площадке вблизи от исходной точки, связанное с блоком управления.
Основной технической проблемой аналога и прототипа является высокая трудоемкость при управлении виртуальны пространством, из-за того, что для формирования команд управления в виртуальной среде пользователю необходимо совершать реальные шаги. Данная проблема существенно осложняет длительное взаимодействие с объектами виртуального пространства из-за высоких энергозатрат пользователя, и дополнительно требует технического оснащения площадок для взаимодействия с виртуальной реальностью.
Задачей изобретения является устранение недостатков прототипа.
Техническим результатом изобретения является уменьшение трудоемкости пользователя при формировании команд управления виртуальной реальностью.
Указанный технический результат достигается за счет того, что устройство для формирования команд управления виртуальной реальностью состоит из двух лент с датчиками угла наклона, при этом каждая лента с датчиками угла наклона выполнена с возможностью фиксации по периметру подошвы левой и правой ноги пользователя, так что первый датчик выполнен с возможностью нахождения в передней части стопы, на ее внутренней стороне, в районе большого и указательного пальцев, второй датчик выполнен с возможностью нахождения в задней части стопы на ее внутренней стороне в пяточной области, третий датчик выполнен с возможностью нахождения в задней части стопы в пяточной области, первый и второй датчики выполнены с возможностью фиксации угла наклона по оси Y вдоль стопы пользователя, третий датчик выполнен с возможностью фиксации угла наклона по оси Х перпендикулярно стопы пользователя, датчики выполнены с возможностью передачи данных о углах наклона для формирования команд управления устройства виртуальной реальности в зависимости от того превышают или нет значения углов наклона пороговое значение.
В частности, лента с датчиками зафиксирована полуавтоматической застежкой фастекс.
В частности, пороговое значение равно 15° относительно плоскости расположения стоп пользователя.
Краткое описание чертежей
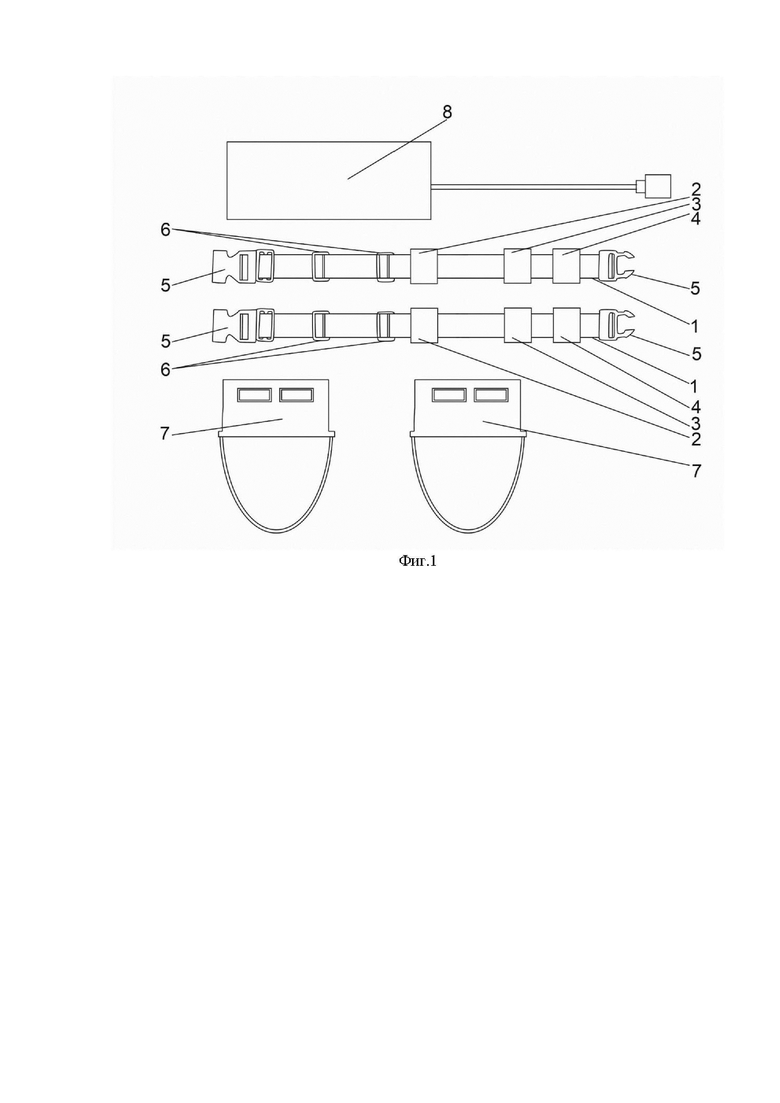
На фиг. 1 показан общий вид функциональных элементов устройства для формирования команд управления виртуальной реальностью.
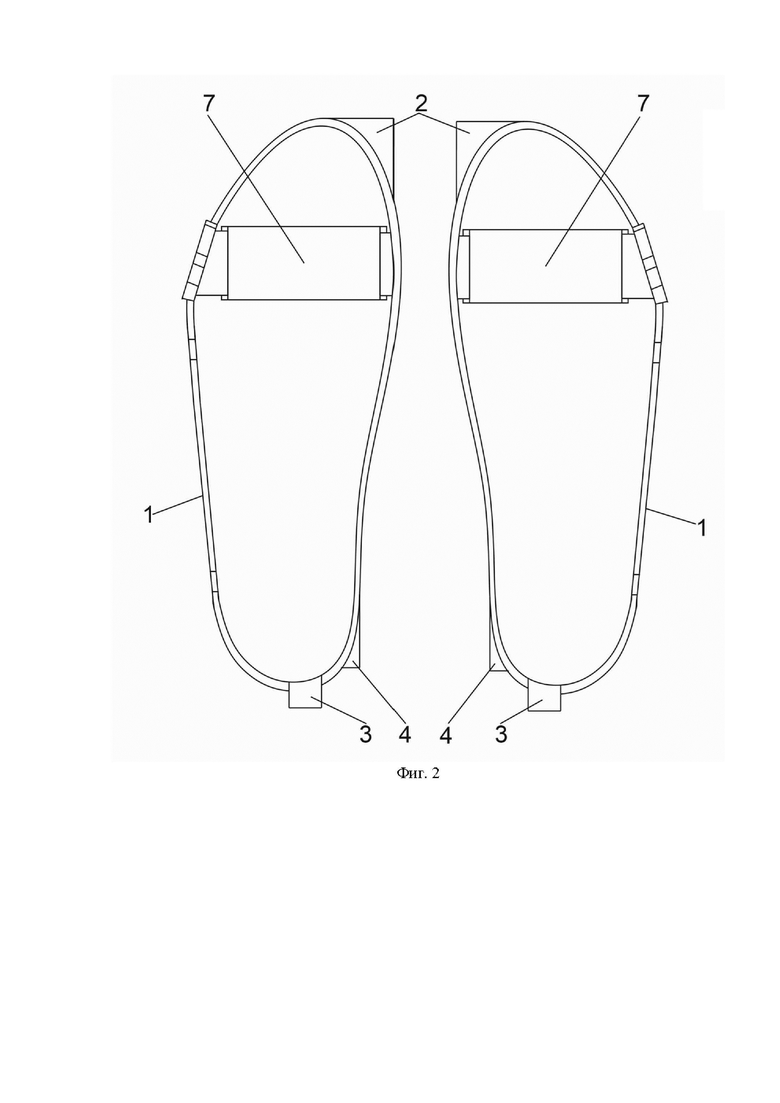
На фиг. 2 показано расположение функциональных элементов устройства для формирования команд управления виртуальной реальностью.
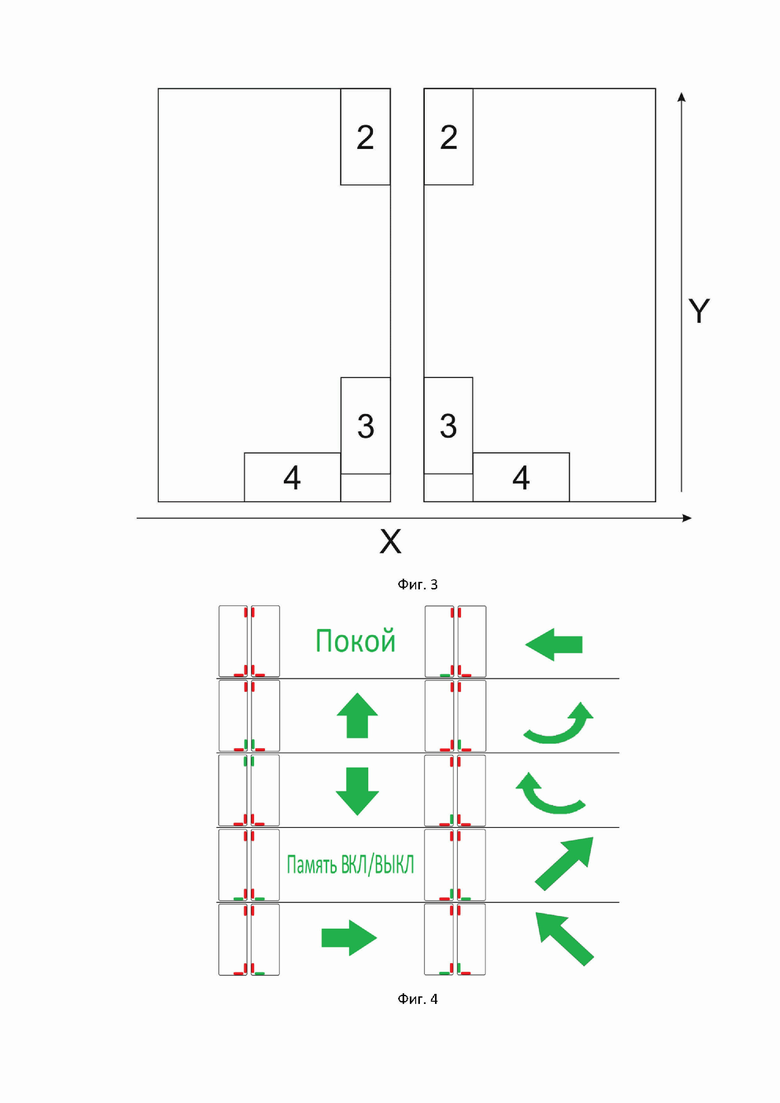
На фиг. 3. показана схема расположения датчиков устройства для формирования команд управления виртуальной реальностью.
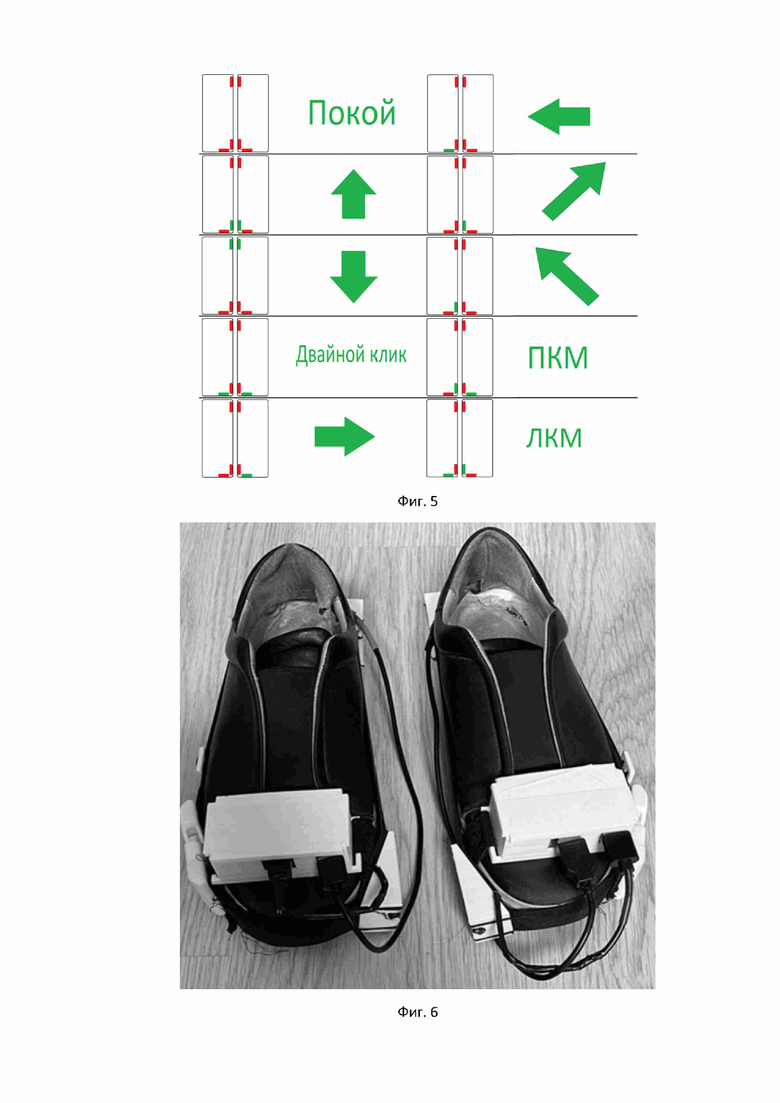
На фиг. 4, 5 показаны варианты комбинаций положений датчиков в соответствии с командами управления программной средой.
На фиг. 6 показан вариант реализации устройства для формирования команд управления виртуальной реальностью.
На фигурах обозначено: 1 - лента с датчиками; 2 - первый датчик; 3 - второй датчик; 4 - третий датчик; 5 - застежка; 6 - регулятор длины; 7 - передатчик; 8 - приемник.
Устройство для формирования команд управления виртуальной реальностью состоит из двух лент с датчиками 1. На каждой ленте с датчиками 1 размещены первый 2, второй 3 и третий 4 датчики угла наклона. При этом первый 2 и второй 3 датчики выполнены с возможностью измерения угла наклона по первой независимой оси (ось Y на фиг. 3), а третий датчик 4 выполнен с возможностью измерения угла наклона по второй независимой оси (ось Х на фиг. 3), перпендикулярной первой. Каждая лента с датчиками 1 может быть изготовлена из текстильного материала и оснащена застежкой 5, выполненной с возможностью фиксации противоположных концов ленты с датчиками 1. В качестве застежки 5 может выступать полуавтоматическая застежка 5 типа фастекс. Также каждая лента с датчиками 5 оснащена регулятором длины ленты 6. В варианте реализации регулятор длины 6 может быть выполнен в виде двух элементов сумочной фурнитуры (двухщелевой или трехщелевой пряжки), расположенных на некотором расстоянии между собой.
Также устройство для управления элементами интерфейса программной среды включает в себя передатчик, выполненный с возможностью получения данных от первого 2, второго 3 и третьего 4 датчиков угла наклона в реальном масштабе времени. В различных вариантах реализации передатчик 7 может быть соединен с датчиками угла наклона посредством провода с USB интерфейсом. Передатчик 7 оснащен фиксатором, выполненным с возможностью фиксации передатчика на передней подошве стопы человека. В качестве фиксатора может выступать текстильная лента, закрепленная на нижних выступах основания передатчика 7.
Также Устройство для формирования команд управления виртуальной реальностью включает в себя подключаемый к компьютеру приемник 8. Приемник 8 выполнен с возможностью получения информации о состоянии датчиков угла наклона от передатчика 7. В различных вариантах реализации приемник 8 и передатчик 7 могут осуществлять обмен информацией как по проводному (например, посредством USB интерфейса), так и беспроводному (например, посредством технологии Wi-Fi) каналу связи.
Приемник 8, в свою очередь, подключен к компьютеру, который, в свою очередь подключен к устройству виртуальной реальности. Приемник 8 выполнен с возможностью передачи информации в специальную программную среду для реализации возможности управления виртуальной средой при помощи поступивших с передатчика 7 данных на устройство виртуальной реальности.
Способ формирования команд управления программной средой виртуальной реальности реализуется посредством вышеописанного устройства и характеризуется тем, что на подготовительном этапе пользователь надежно фиксирует ленту с датчиками 1 по периметру подошв левой и правой ноги (рекомендуется, при этом, чтобы ноги были обуты). При этом лента с датчиками 1 фиксируется таким образом, чтобы первый 2, второй 3 и третий 4 датчики были размещены, как показано на фиг. 2, 3. То есть первый датчик 2 размещают в передней части стопы, на ее внутренней стороне, в районе большого и указательного пальцев. Второй датчик 3 размещают в задней части стопы на ее внутренней стороне в пяточной области; третий датчик 4 размещают в задней части стопы в пяточной области. Далее осуществляют надежную фиксацию передатчика 7 в области подъема стопы или над пальцами, посредством текстильного фиксатора. Таким образом, первый 2 и второй 3 датчики будут фиксировать изменение угла наклона по первой независимой оси вдоль стопы (ось Y на фиг. 3), а третий датчик 4 будет фиксировать измерение угла наклона по второй независимой оси перпендикулярно стопы (ось Х на фиг. 3). Далее, при необходимости проводного соединения датчиков угла наклона и передатчика 7 осуществляют их подключения. В тоже самок время, обеспечивают надежный канал передачи информации между передатчиком 7 и приёмником 8. Приемник 8 подключают к компьютеру, который в свою очередь подключают к устройству виртуальной реальности (например, VR-шлему) предварительно одетому на пользователя.
При реализации способа управления элементами интерфейса программной среды показания с первого 2, второго 3 и третьего 4 датчика в реальном масштабе времени передаются на передатчик 7, который передает данные на приемник 8, который обрабатывает полученные данные посредством специализированного программного обеспечения, и формирует команды управления виртуальной реальностью, которые через компьютер передаются в устройство виртуальной реальности где, на основе них происходит взаимодействие с виртуальным пространством. Таким образом, управление элементами интерфейса и объектами виртуальной реальности осуществляется на основании данных, поступивших с датчиков угла наклона. Приемник 8 обрабатывает данные с датчиков угла наклона и присваивает им либо активное, либо неактивное состояние. Если показание одного из датчика в соответствии с закрепленной независимой осью превышает значение 15°, то пороговое значение считается превышенным и на приемник 8 поступает информация что соответствующий датчик является активным; если показание одного из датчика в соответствии с закрепленной независимой осью не превышает значение 15°, то пороговое значение считается не превышенным и датчик является неактивным. В зависимости от того, какие из датчиков являются активными или неактивными, в фиксированный момент времени, формируется соответствующая команда управления виртуальным пространством.
Пример реализации.
Вышеописанный способ управления элементами интерфейса программной среды может быть использован для управления в компьютерных играх с использованием шлема виртуальной реальности. В таком случае, команды управления элементами интерфейса компьютерной игры формируют в соответствии с тем, какие из датчиков в текущий момент времени являются активными, а какие пассивными.
На фиг. 4 показаны варианты комбинаций положений датчиков в соответствии с командами управления характерных для компьютерных игр. В соответствии с этим:
- если все датчики являются неактивными (что соответствует стоячему положению стоп человека в состоянии покоя) реализуется команда «Покой» - изменения пользователем виртуального пространства не происходит;
- если третий датчик 4 фиксирует отклонение более 15° по второй независимой оси на левой ноге (медиальная сторона левой стопы приподнята, латеральная сторона левой стопы не приподнята) реализуется команда «Движение налево» - пользователь в виртуальном пространстве движется влево;
- если вторые датчики 3 фиксируют отклонения более 15° по первой независимой оси на обеих ногах (пятки обоих стоп приподняты, человек стоит на носках) реализуется команда «Движение вперед» - пользователь в виртуальном пространстве движется вперед;
- если второй датчик 3 фиксирует отклонения более 15° по первой независимой оси на правой ноге (пятка правой стопы приподнята) реализуется команда «Поворот на право» - пользователь в виртуальном пространстве поворачивается на право;
- если первые датчики 2 фиксируют отклонения более 15° по первой независимой оси на обеих ногах (передние части обеих стоп приподняты, человек стоит на пятках) реализуется команда «Движение назад» - пользователь в виртуальном пространстве движется назад;
- если второй датчик 3 фиксирует отклонения более 15° по первой независимой оси на левой ноге (пятка левой стопы приподнята) реализуется команда «Поворот налево» - пользователь в виртуальном пространстве поворачивается налево;
- если третьи датчики 4 фиксируют отклонения более 15° по второй независимой оси на обеих ногах (медиальная сторона левой стопы приподнята, латеральная сторона левой стопы не приподнята, медиальная сторона правой стопы приподнята, латеральная сторона правой стопы не приподнята) реализуется команда «Память вкл/выкл» - система запоминает/не запоминает последние команды пользователя;
- если второй датчик 3 фиксирует отклонение более 15° по первой независимой оси на левой ноге, одновременно с этим, если третий датчик 4 фиксирует отклонение более 15° по второй независимой оси на правой ноге (пятка левой стопы приподнята, медиальная сторона правой стопы приподнята, латеральная сторона правой стопы не приподнята), реализуется команда «Движение по диагонали вправо» - пользователь в виртуальном пространстве движется по диагонали вправо;
- если второй датчик 3 фиксирует отклонение более 15° по первой независимой оси на правой ноге, одновременно с этим если третий датчик 4 фиксирует отклонение более 15° по второй независимой оси на левой ноге (пятка правой стопы приподнята, медиальная сторона левой стопы приподнята, латеральная сторона левой стопы не приподнята) реализуется команда «Движение по диагонали влево» - пользователь в виртуальном пространстве движется по диагонали влево;
- если третий датчик 4 фиксирует отклонение более 15° по второй независимой оси на правой ноге (медиальная сторона правой стопы приподнята, латеральная сторона правой стопы не приподнята) реализуется команда «Движение на право» пользователь в виртуальном пространстве движется вправо;
- возможны другие варианты комбинаций активных и неактивных датчиков.
Также заявленный способ управления элементами интерфейса программной среды может быть использован для управления курсором мыши. На фиг. 5 показаны варианты комбинаций положений датчиков в соответствии с командами управления.
Заявленный технический результат, уменьшение трудоемкости пользователя при формировании команд управления виртуальной реальностью, достигается за счет того, что все команды управления формируется, когда пользователь находится на одном месте в ходе изменения положений стоп. Таким образом не требуется совершений никаких дополнительных действий, а именно - перемещений, шагов, жестов и т.д., что способствует упрощению взаимодействия с элементами виртуального пространства и предоставляет возможность взаимодействовать с виртуальной реальностью более продолжительный отрезок времени. Наличие первого 2 и второго 3 датчика (с возможностью измерения угла наклона по первой независимой оси) и третьего датчика угла наклона (с возможностью измерения угла наклона по второй независимой оси, перпендикулярной первой) в позициях в соответствии с фиг. 2, 3 обеспечивает возможность формирования широко перечня интуитивно понятных команд управления виртуальной реальностью, не противоречащим физиологии положения стоп пользователя. Наличие порога фиксации в 15° (который был определен экспериментальным путем) относительно плоскости расположения стоп пользователя, с одной стороны, обеспечивает минимальное количество ложных срабатываний датчиков при управлении пространством виртуальной реальности, с другой стороны не требует больших трудозатрат для изменений положения стопы, что обеспечивает комфортное использование устройства. Наличие застежек 5, регуляторов длины 6, фиксаторов на передатчике 7 обеспечивает возможность надежной фиксации устройства независимо от физиологических особенностей человека, что также способствует уменьшению ложных срабатываний датчиков угла наклона и позволяет управлять виртуальным пространством с меньшими трудозатратами.
Заявителем в 2022 году был изготовлен образец заявленного устройства (фиг. 6), опытная эксплуатация которого подтвердила заявленный технический результат, трудоемкость пользователя при формировании команд управления виртуальным пространством была снижена в среднем на 40-70% по сравнению со способами, основанными на перемещении пользователя в пространстве, что сказалось на увеличении длительности сеансов погружения в виртуальную среду и отсутствии признаков усталости после сеансов взаимодействия с устройствами виртуальной реальности.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ погружения в виртуальную реальность, подвес и экзо-скелет, применяемые для его реализации | 2015 |
|
RU2646324C2 |
| Беговой тренажер с интерфейсом виртуальной реальности | 2023 |
|
RU2813000C1 |
| УСТРОЙСТВО ДЛЯ ОРГАНИЗАЦИИ ИНТЕРФЕЙСА С ОБЪЕКТОМ ВИРТУАЛЬНОЙ РЕАЛЬНОСТИ | 2011 |
|
RU2486608C2 |
| Способ ранней реабилитации пациентов при остром поражении головного мозга с использованием виртуальной реальности | 2023 |
|
RU2835867C2 |
| СИСТЕМА И СПОСОБ ДЛЯ ЗАХВАТА ДВИЖЕНИЙ И ПОЛОЖЕНИЯ ТЕЛА ЧЕЛОВЕКА И ЧАСТЕЙ ТЕЛА ЧЕЛОВЕКА | 2017 |
|
RU2662399C1 |
| Программно-аппаратный комплекс для лечения нарушений позы и ходьбы | 2022 |
|
RU2809515C2 |
| Способ подготовки парашютистов на тренажере воздушно-десантной подготовки и устройство его реализующее | 2021 |
|
RU2769481C1 |
| СПОСОБ РЕАБИЛИТАЦИИ ПАЦИЕНТОВ ПРИ ПОВРЕЖДЕНИИ ГОЛОВНОГО МОЗГА С ИСПОЛЬЗОВАНИЕМ АППАРАТНОГО КОМПЛЕКСА ПНЕВМАТИЧЕСКОЙ КОМПРЕССИИ И ВИРТУАЛЬНОЙ РЕАЛЬНОСТИ | 2023 |
|
RU2823510C1 |
| Способ подготовки парашютистов на тренажере воздушно-десантной подготовки | 2024 |
|
RU2832446C1 |
| СПОСОБ ОТСЛЕЖИВАНИЯ И ОТОБРАЖЕНИЯ ПОЛОЖЕНИЯ И ОРИЕНТАЦИИ ПОЛЬЗОВАТЕЛЯ В ПРОСТРАНСТВЕ И СИСТЕМА ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 1996 |
|
RU2107328C1 |
Изобретение относится к устройствам для взаимодействия пользователя с программными интерфейсами, в том числе реализованных посредством технологии виртуальной реальности. Устройство состоит из двух лент с датчиками угла наклона, при этом каждая лента с датчиками угла наклона выполнена с возможностью фиксации по периметру подошвы левой и правой ноги пользователя, так что первый датчик выполнен с возможностью нахождения в передней части стопы, на ее внутренней стороне, в районе большого и указательного пальцев, второй датчик выполнен с возможностью нахождения в задней части стопы на ее внутренней стороне в пяточной области, третий датчик выполнен с возможностью нахождения в задней части стопы в пяточной области, первый и второй датчики выполнены с возможностью фиксации угла наклона по оси Y вдоль стопы пользователя, третий датчик выполнен с возможностью фиксации угла наклона по оси Х перпендикулярно стопы пользователя, датчики выполнены с возможностью передачи данных о углах наклона для формирования команд управления устройства виртуальной реальности в зависимости от того превышают или нет значения углов наклона пороговое значение. Уменьшается трудоемкость. 2 з.п. ф-лы, 6 ил.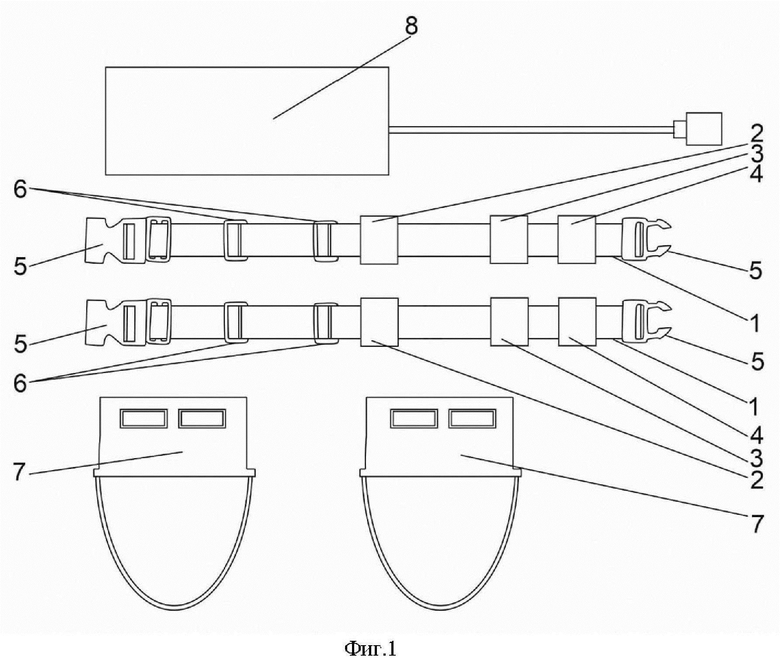
1. Устройство для формирования команд управления виртуальной реальностью состоит из двух лент с датчиками угла наклона, при этом каждая лента с датчиками угла наклона выполнена с возможностью фиксации по периметру подошвы левой и правой ноги пользователя, так что первый датчик выполнен с возможностью нахождения в передней части стопы, на ее внутренней стороне, в районе большого и указательного пальцев, второй датчик выполнен с возможностью нахождения в задней части стопы на ее внутренней стороне в пяточной области, третий датчик выполнен с возможностью нахождения в задней части стопы в пяточной области, первый и второй датчики выполнены с возможностью фиксации угла наклона по оси Y вдоль стопы пользователя, третий датчик выполнен с возможностью фиксации угла наклона по оси Х перпендикулярно стопы пользователя, датчики выполнены с возможностью передачи данных о углах наклона для формирования команд управления устройства виртуальной реальности в зависимости от того превышают или нет значения углов наклона пороговое значение.
2. Устройство по п.1, отличающееся тем, что лента с датчиками зафиксирована полуавтоматической застежкой фастекс.
3. Устройство по п.1, отличающееся тем, что пороговое значение равно 15° относительно плоскости расположения стоп пользователя.
| СПОСОБ ПОГРУЖЕНИЯ ПОЛЬЗОВАТЕЛЯ В ВИРТУАЛЬНУЮ РЕАЛЬНОСТЬ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1996 |
|
RU2109337C1 |
| WO 2014066667 A1, 01.05.2014 | |||
| ОПРЕССОВАННЫЙ СОЕДИНИТЕЛЬ И СБОРОЧНЫЙ УЗЕЛ ДЛЯ КОМПОЗИТНЫХ КАБЕЛЕЙ И СПОСОБЫ ИХ ИЗГОТОВЛЕНИЯ И ИСПОЛЬЗОВАНИЯ | 2011 |
|
RU2537967C2 |
| WO 2015143251 A1, 24.09.2015. | |||
